Vous aimerez peut-être aussi
- Lab ManualDocument7 pagesLab ManualAlain JimeneaPas encore d'évaluation
- Resistor Measurement Using Color CodingDocument4 pagesResistor Measurement Using Color CodingAlain JimeneaPas encore d'évaluation
- Tranducers: ECE 427 - Industrial ElectronicsDocument6 pagesTranducers: ECE 427 - Industrial ElectronicsAlain JimeneaPas encore d'évaluation
- Sase Application 2018 FinalDocument2 pagesSase Application 2018 FinalAlain JimeneaPas encore d'évaluation
- Electrical Layout and Estimate Second Edition GuideDocument349 pagesElectrical Layout and Estimate Second Edition GuideArlie Lobrigo93% (136)
- CoE 421 - Lecture 1Document16 pagesCoE 421 - Lecture 1Alain JimeneaPas encore d'évaluation
- CoE 421 - Lecture 1Document16 pagesCoE 421 - Lecture 1Alain JimeneaPas encore d'évaluation
- Arch0118 AlphaDocument23 pagesArch0118 AlphaRappler100% (1)
- Microcomputer Programming Languages: Machine, Assembly & High LevelDocument15 pagesMicrocomputer Programming Languages: Machine, Assembly & High LevelAlain JimeneaPas encore d'évaluation
- Electronics Ch2Document26 pagesElectronics Ch2Fredie CariñoPas encore d'évaluation
- SemiFinals Lect6Document16 pagesSemiFinals Lect6Alain JimeneaPas encore d'évaluation
- Automate SiemensDocument534 pagesAutomate SiemensWalid JaffaliPas encore d'évaluation
- 7.8 Structure of A Transient Stability ProgramDocument34 pages7.8 Structure of A Transient Stability ProgramBogdan VicolPas encore d'évaluation
- 08 PDFDocument47 pages08 PDFAlain JimeneaPas encore d'évaluation
- System Stability: of of SDocument34 pagesSystem Stability: of of SAlain JimeneaPas encore d'évaluation
- 06b PDFDocument33 pages06b PDFJuan Carlos Robles ResurreccionPas encore d'évaluation
- IndxDocument22 pagesIndxHai HaiPas encore d'évaluation
- Preface XiDocument6 pagesPreface XiSama ElPas encore d'évaluation
- PrefDocument1 pagePrefSama ElPas encore d'évaluation
- Computer: ElectricalDocument2 pagesComputer: ElectricalSama ElPas encore d'évaluation
- 06aDocument34 pages06aGabriel Lopez BarajasPas encore d'évaluation
- Fault Level Calculation MethodsDocument16 pagesFault Level Calculation MethodsBogdan VicolPas encore d'évaluation
- 1.1 General BackgroundDocument3 pages1.1 General BackgroundJuan Carlos Robles ResurreccionPas encore d'évaluation
- 04Document48 pages04Hai HaiPas encore d'évaluation
- 03 PDFDocument28 pages03 PDFJuan Carlos Robles ResurreccionPas encore d'évaluation
- Rules of The RoadDocument268 pagesRules of The RoadSuryaprakash Reddy EesariPas encore d'évaluation
- Transmission: SystemsDocument48 pagesTransmission: SystemsAlain JimeneaPas encore d'évaluation
- The Complete Aquarium Guide Fish, Plants, & Accessories For Your Aquarium (English)Document288 pagesThe Complete Aquarium Guide Fish, Plants, & Accessories For Your Aquarium (English)Nigel Tuke100% (1)
- Bridgestone (E)Document36 pagesBridgestone (E)Alain JimeneaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Circuitpages Light Dark Activated RelayDocument14 pagesCircuitpages Light Dark Activated Relayalexwongks6118Pas encore d'évaluation
- Chapter 2 Analysis of Statically Determinate Structure (Part 1)Document38 pagesChapter 2 Analysis of Statically Determinate Structure (Part 1)Aubrey Anne Ilagan100% (1)
- Jammu University SyllabusDocument83 pagesJammu University SyllabusgolumjetPas encore d'évaluation
- Caterpillar Egr 2010Document15 pagesCaterpillar Egr 2010Eduardo TorresPas encore d'évaluation
- Motion & Time DPP Class 7 PhysicsDocument2 pagesMotion & Time DPP Class 7 PhysicsRiya PatelPas encore d'évaluation
- Experiment 4 Conclusion Physics LabDocument2 pagesExperiment 4 Conclusion Physics LabYna Lafuente100% (1)
- What Are Detuned Reactors?Document2 pagesWhat Are Detuned Reactors?Ganesh KumarPas encore d'évaluation
- Radio Wave Propagation MCQsDocument89 pagesRadio Wave Propagation MCQsJohn Paul Cordova67% (9)
- Acceleration DLPDocument3 pagesAcceleration DLPMark Anthony BesinalPas encore d'évaluation
- Electrical SubstationDocument221 pagesElectrical SubstationMohammedSaadaniHassani91% (11)
- Relay Protection Basics Rev 3Document137 pagesRelay Protection Basics Rev 3bookbum100% (2)
- Semi Detailed Lesson Plan in Electricity g71Document6 pagesSemi Detailed Lesson Plan in Electricity g71Edessa MasinasPas encore d'évaluation
- Engineering A Solution To The Problem of Dry-Band Arcing On ADSS CablesDocument27 pagesEngineering A Solution To The Problem of Dry-Band Arcing On ADSS Cablesrjk941-1Pas encore d'évaluation
- Students' Misconceptions in Intro PhysicsDocument6 pagesStudents' Misconceptions in Intro PhysicsChris_Barber09Pas encore d'évaluation
- DC Motor Speed Control PID Implementation Simulink PDFDocument12 pagesDC Motor Speed Control PID Implementation Simulink PDFvince kafuaPas encore d'évaluation
- AlternatorDocument16 pagesAlternatorjeevapillay100% (1)
- Contact Data Tables: Relay and Timer SpecificationsDocument1 pageContact Data Tables: Relay and Timer SpecificationsArif KhanPas encore d'évaluation
- A Tentative Design Guideline For A New Steel Beam Connection Detail To Composite Tube ColumnsDocument8 pagesA Tentative Design Guideline For A New Steel Beam Connection Detail To Composite Tube ColumnsRMKD PrabhuPas encore d'évaluation
- DUT HV Engineering Practical on Partial Discharge SimulationDocument3 pagesDUT HV Engineering Practical on Partial Discharge SimulationSibongiseni MasondoPas encore d'évaluation
- ILL-Dynamic vs. Quasi-Static Design of Catenary Mooring SystemDocument8 pagesILL-Dynamic vs. Quasi-Static Design of Catenary Mooring Systemmohdsolihat1Pas encore d'évaluation
- The Development of Two Mobile Gait Rehabilitation SystemsDocument11 pagesThe Development of Two Mobile Gait Rehabilitation SystemsZuley Hurtado HernandezPas encore d'évaluation
- Guide To Mechanics PDFDocument303 pagesGuide To Mechanics PDFAlcides AcevedoPas encore d'évaluation
- 825 pp011 - en PDocument8 pages825 pp011 - en PPedroMirandaCarmoPas encore d'évaluation
- CIE - IGSCE - Physics Syllabus - 2020-2021Document46 pagesCIE - IGSCE - Physics Syllabus - 2020-2021astargroupPas encore d'évaluation
- Solution Manual For Power System Analysis Design SI Version 5E Chapter 02 3Document26 pagesSolution Manual For Power System Analysis Design SI Version 5E Chapter 02 3asim8382Pas encore d'évaluation
- Physics 2 Week 3Document3 pagesPhysics 2 Week 3senpai notice mePas encore d'évaluation
- LVDT: Linear Variable Differential Transformer ExplainedDocument8 pagesLVDT: Linear Variable Differential Transformer ExplainedRakesh MahajanPas encore d'évaluation
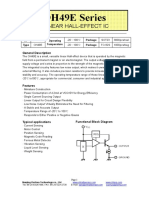
- Linear Hall Sensor Technical SpecsDocument3 pagesLinear Hall Sensor Technical SpecsjelhostePas encore d'évaluation
- Grade 10 Physics Assignment Notes 1Document25 pagesGrade 10 Physics Assignment Notes 1habiba buttPas encore d'évaluation
- Physics 30: Lesson 24 on Energy, Work and PowerDocument12 pagesPhysics 30: Lesson 24 on Energy, Work and Poweri5piritiPas encore d'évaluation