Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Characterization of NanoparticlesDocument16 pagesCharacterization of NanoparticlesPrasun SarkarPas encore d'évaluation
- 5.helmholtz Coils - DDDocument6 pages5.helmholtz Coils - DDShubham BirangePas encore d'évaluation
- ENG LiSA20-Fehlermeldungen R111Document36 pagesENG LiSA20-Fehlermeldungen R111Adarsh Manoharan100% (1)
- Service Manual: STR-DE197Document62 pagesService Manual: STR-DE197Marvin SolisPas encore d'évaluation
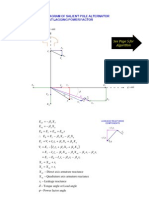
- Synchronous (Salient Pole) Machine Phasor DiagramDocument5 pagesSynchronous (Salient Pole) Machine Phasor DiagramMELVIN88% (8)
- Direction Control ValveDocument5 pagesDirection Control ValvefazarPas encore d'évaluation
- Temperature Control With SCRDocument3 pagesTemperature Control With SCRRoberto Fernandez100% (3)
- DC Machine As EmulatorDocument8 pagesDC Machine As Emulatordebasis250Pas encore d'évaluation
- REF542plus Tob 756269 ENaDocument28 pagesREF542plus Tob 756269 ENaRazvan MaresPas encore d'évaluation
- Power Electronics-An Emerging Technology - B.K.BoseDocument8 pagesPower Electronics-An Emerging Technology - B.K.Bosegeraleao208Pas encore d'évaluation
- PD-42DX CH - MK (sm-52088)Document140 pagesPD-42DX CH - MK (sm-52088)Roberd MihailovPas encore d'évaluation
- Fundamentals of Thermoelectrics (TE)Document8 pagesFundamentals of Thermoelectrics (TE)Prakash GPas encore d'évaluation
- Circuit Schematic SymbolsDocument7 pagesCircuit Schematic SymbolsRajesh KannanPas encore d'évaluation
- Nano VNA MARC Part I and II May 24Document147 pagesNano VNA MARC Part I and II May 24fox7878Pas encore d'évaluation
- Basic Electronic Components: 1.1. Colour Coding of ResistorDocument84 pagesBasic Electronic Components: 1.1. Colour Coding of ResistorPakistan augustPas encore d'évaluation
- Chaffee - Theory - of - Thermionic - Vacuum - Tubes PDFDocument688 pagesChaffee - Theory - of - Thermionic - Vacuum - Tubes PDFMichel CormierPas encore d'évaluation
- RM4LA32MW: Product Data SheetDocument9 pagesRM4LA32MW: Product Data Sheeta safaiePas encore d'évaluation
- RW748U 700W 48V DC Wall Mount RectifierDocument2 pagesRW748U 700W 48V DC Wall Mount RectifierGuillermo OvelarPas encore d'évaluation
- Stack Project Report On Smoke Detector - Ilovepdf-CompressedDocument36 pagesStack Project Report On Smoke Detector - Ilovepdf-CompressedSanthosh Kumar H O50% (6)
- Electromagnetic Waves and Maxwells EquationsDocument12 pagesElectromagnetic Waves and Maxwells Equationssneha mukherjeePas encore d'évaluation
- Radar SystemsDocument62 pagesRadar SystemsyogeshPas encore d'évaluation
- Overview:: Book Title:-Physics For Joint Entrance Examination JEEDocument6 pagesOverview:: Book Title:-Physics For Joint Entrance Examination JEEkunalPas encore d'évaluation
- HVE Exam Jan 08Document5 pagesHVE Exam Jan 08LuzanePas encore d'évaluation
- Defining Size and Location of Capacitor in Electrical System (1) - EEPDocument10 pagesDefining Size and Location of Capacitor in Electrical System (1) - EEPMilton EspinozaPas encore d'évaluation
- Chapter 2 Fiber Optics A Brief History of Fiber Optics Lesson 4Document5 pagesChapter 2 Fiber Optics A Brief History of Fiber Optics Lesson 4elevitas2016Pas encore d'évaluation
- Panel 600 36 W 4000 K Op WT: Product DatasheetDocument5 pagesPanel 600 36 W 4000 K Op WT: Product DatasheetHadeel QatananiPas encore d'évaluation
- MCQ On Unit 3 EC20Document9 pagesMCQ On Unit 3 EC20zohaib100% (2)
- Data Sheet 1500kw 6.6kv Pa Fan MotorDocument4 pagesData Sheet 1500kw 6.6kv Pa Fan MotorRamesh CuppuPas encore d'évaluation
- Insem 1 - PE - Handbook - 2023Document3 pagesInsem 1 - PE - Handbook - 2023Ananya VPas encore d'évaluation
- User Manual - Fiplex Compact RepeatersDocument26 pagesUser Manual - Fiplex Compact Repeaterscrispix2000Pas encore d'évaluation