Vous aimerez peut-être aussi
- UntitledDocument10 pagesUntitledTito VilchezPas encore d'évaluation
- TRABAJO 2 FISICA 1 PROYECTO FinalDocument25 pagesTRABAJO 2 FISICA 1 PROYECTO FinalDaniel Diaz GutierrezPas encore d'évaluation
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsD'EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsPas encore d'évaluation
- Sesión 6 - Diseño Hidraulico de Una RapidaDocument14 pagesSesión 6 - Diseño Hidraulico de Una RapidajoelPas encore d'évaluation
- Principios de transferencia de cantidad de movimientoD'EverandPrincipios de transferencia de cantidad de movimientoPas encore d'évaluation
- 1 2016 Modelos de DerrapeDocument19 pages1 2016 Modelos de DerrapeSandra Diaz ArronizPas encore d'évaluation
- Lecciones de meteorología dinámica y modelamiento atmosféricoD'EverandLecciones de meteorología dinámica y modelamiento atmosféricoPas encore d'évaluation
- Topografia y Obras VialesDocument30 pagesTopografia y Obras VialesJocelyn Muňoz VegaPas encore d'évaluation
- Dia Positi VasDocument148 pagesDia Positi VasRodrigo CastilloPas encore d'évaluation
- UF1253 - Diagnóstico de deformaciones estructuralesD'EverandUF1253 - Diagnóstico de deformaciones estructuralesPas encore d'évaluation
- Tema3-Cinematica MecanismosDocument48 pagesTema3-Cinematica Mecanismosjoiron24Pas encore d'évaluation
- Introducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.D'EverandIntroducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Pas encore d'évaluation
- Tema #6 - Alineamiento Vertical PDFDocument11 pagesTema #6 - Alineamiento Vertical PDFMaria Victoria Andara CabreraPas encore d'évaluation
- Clase 03 Cinemática de Particulas Sistemas de Coordenadas1Document13 pagesClase 03 Cinemática de Particulas Sistemas de Coordenadas1Carlos Daniel Guillen FlorezPas encore d'évaluation
- Laboratorio 1 Carreteras EspiralDocument14 pagesLaboratorio 1 Carreteras EspiralBrandon airton Ávila nicolaPas encore d'évaluation
- Teorema Del Area de Momentos para Flexiones - E2Document13 pagesTeorema Del Area de Momentos para Flexiones - E2Courtney Osborne100% (1)
- Inf - Analítico EXAMEN1 G3 MecanismosDocument17 pagesInf - Analítico EXAMEN1 G3 MecanismosJoséPas encore d'évaluation
- Diseño de ViasDocument19 pagesDiseño de ViasMiguel GarciaPas encore d'évaluation
- Sesion 3 Movimiento Curvilineo-Helicoidal 2016-1Document15 pagesSesion 3 Movimiento Curvilineo-Helicoidal 2016-1ROBERTO MICHAEL YANTAS RIVERAPas encore d'évaluation
- Cinematica de Particula-UDocument83 pagesCinematica de Particula-UYasmin Maribel Huisacayna GuzmanPas encore d'évaluation
- Trabajo de Movimiento CurvilineoDocument6 pagesTrabajo de Movimiento CurvilineoGuillermo David Cáceres100% (1)
- Proyecto - Entrega 2Document22 pagesProyecto - Entrega 2Sandy Karina Serrano PeñaPas encore d'évaluation
- Curvas VerticalesDocument81 pagesCurvas VerticalesJonatan RodriguezPas encore d'évaluation
- Rueda de MaxwellDocument29 pagesRueda de MaxwellJorman Iván Barrera Vergara50% (2)
- Fisica 1 INFORME 1Document9 pagesFisica 1 INFORME 1PedroAmp97Pas encore d'évaluation
- Diario 3Document6 pagesDiario 3Michael BermeoPas encore d'évaluation
- El Alineamiento Horizontal. Curvas Circulares 2016Document20 pagesEl Alineamiento Horizontal. Curvas Circulares 2016Klen janer Rosales mejiaPas encore d'évaluation
- Dinamica BeerDocument23 pagesDinamica BeerYeampier Pariente100% (1)
- Proyecto S5 - Unidad 1Document13 pagesProyecto S5 - Unidad 1ALEX GENARO COTRINA ESCOBALPas encore d'évaluation
- Tema 2 - Segunda Parte. Análisis Cinemático de Mecanismos PlanosDocument38 pagesTema 2 - Segunda Parte. Análisis Cinemático de Mecanismos Planosalbertocc1978100% (1)
- Semana 03Document22 pagesSemana 03cavabenitesdiegoPas encore d'évaluation
- Proyecto Dinamica 2Document15 pagesProyecto Dinamica 2Raúl LópezPas encore d'évaluation
- Examen SustitutorioDocument3 pagesExamen SustitutorioMichael CorleonePas encore d'évaluation
- Informe Dinámica Final LatexDocument15 pagesInforme Dinámica Final LatexAlex ĄrmijOs100% (1)
- Practica 2Document15 pagesPractica 2Iván GonzálezPas encore d'évaluation
- Quia de Fisica de ApoyoDocument30 pagesQuia de Fisica de ApoyoValeria Gil33% (3)
- Lab4 Robotica Gutiérrezoppe KcanasaicoDocument15 pagesLab4 Robotica Gutiérrezoppe KcanasaicoEDISSON ALFREDO GUTIERREZ OPPEPas encore d'évaluation
- Lab4 Robótica Gutiérrezoppe KcanasaicoDocument15 pagesLab4 Robótica Gutiérrezoppe KcanasaicoEDISSON ALFREDO GUTIERREZ OPPEPas encore d'évaluation
- Cinetica de Un Punto - Impulso y Cantidad de Movimiento 2Document28 pagesCinetica de Un Punto - Impulso y Cantidad de Movimiento 2EFraín S DzPas encore d'évaluation
- Modelado y Análisis de La Dinámica de Grúas: September 2000Document7 pagesModelado y Análisis de La Dinámica de Grúas: September 2000Andrés Felipe LópezPas encore d'évaluation
- Tema 16 Cinetica Del Cuerpo RigidoDocument49 pagesTema 16 Cinetica Del Cuerpo RigidoManeMCzPas encore d'évaluation
- Trazado y Replanteo Del Proyecto Horizontal de Una Carretera Utilizando Estación TotalDocument9 pagesTrazado y Replanteo Del Proyecto Horizontal de Una Carretera Utilizando Estación TotalMaximiliano Cortez Chambi100% (1)
- Dinamica G4Document15 pagesDinamica G4Jose Manuel Campos RiveraPas encore d'évaluation
- PROYECTO Materiales MetalicosDocument16 pagesPROYECTO Materiales MetalicosJuan Camilo Guzman AcunaPas encore d'évaluation
- Informe #6 Fisica Movimiento Uniformemente AceleradoDocument7 pagesInforme #6 Fisica Movimiento Uniformemente AceleradoanikaPas encore d'évaluation
- Trabajo Analisis de AceleracionDocument18 pagesTrabajo Analisis de AceleracionJesus RodriguezPas encore d'évaluation
- Eje Geometrico Vial, Sector Sauzal (Diseño Geometrico)Document53 pagesEje Geometrico Vial, Sector Sauzal (Diseño Geometrico)Cristian Pacheco GutierrezPas encore d'évaluation
- Curvas VerticalesDocument26 pagesCurvas VerticalesLuis Vera OrralaPas encore d'évaluation
- Tutoria No 1 Física GeneralDocument64 pagesTutoria No 1 Física GeneralJairo Andres Criollo LopezPas encore d'évaluation
- Unidad II-Cinemática de Traslación 2022 FIR115Document31 pagesUnidad II-Cinemática de Traslación 2022 FIR115Guadalupe Isabel Durán AguilarPas encore d'évaluation
- EV 3. Sandro Arias, Felipe Gómez, Abigail Villar, Manuel Vásquez, Luis Rojas.Document19 pagesEV 3. Sandro Arias, Felipe Gómez, Abigail Villar, Manuel Vásquez, Luis Rojas.CerostudioPas encore d'évaluation
- Practica 1 Y 2 Diseño de Vias IDocument26 pagesPractica 1 Y 2 Diseño de Vias Idiego duran garciaPas encore d'évaluation
- Curvas EspiralesDocument13 pagesCurvas EspiralesMarvy Guzman0% (2)
- Curva de RemansoDocument13 pagesCurva de RemansocachahuallpaPas encore d'évaluation
- LevasDocument14 pagesLevasyuri_caroPas encore d'évaluation
- Sistemas de Control Digital - ProyectoDocument22 pagesSistemas de Control Digital - ProyectoharoldPas encore d'évaluation
- Ejercicios Resueltos HibbelerDocument22 pagesEjercicios Resueltos HibbelerLuis Diaz RodriguezPas encore d'évaluation
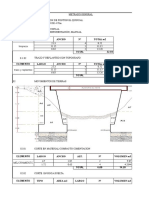
- Metrado PontonDocument31 pagesMetrado PontonRicardo AndrePas encore d'évaluation
- Memoria DescriptivaDocument10 pagesMemoria DescriptivaRicardo AndrePas encore d'évaluation
- Diseño de Pavimento v.2 2015 - RE3V2Document1 pageDiseño de Pavimento v.2 2015 - RE3V2Ricardo AndrePas encore d'évaluation
- Viga Benkelman (Qro-Leon) - Cuerpo BDocument15 pagesViga Benkelman (Qro-Leon) - Cuerpo BRicardo AndrePas encore d'évaluation
- Obligaciones Responsabilidades Del Ingeniero ResidenteDocument1 pageObligaciones Responsabilidades Del Ingeniero ResidenteRicardo AndrePas encore d'évaluation
- Resistencia de Mat II-2periodoDocument9 pagesResistencia de Mat II-2periodoRicardo AndrePas encore d'évaluation
- Socavacion en PuentesDocument16 pagesSocavacion en PuentesCésar Augusto Giraldo GarcíaPas encore d'évaluation
- Calculo Presiones en Agua Potable 04 BarriosDocument48 pagesCalculo Presiones en Agua Potable 04 BarriosRicardo AndrePas encore d'évaluation
- Calibre de CablesDocument2 pagesCalibre de CablesleonelbelitoPas encore d'évaluation
- Calc de Hundimiento ZapataDocument1 pageCalc de Hundimiento ZapataRicardo AndrePas encore d'évaluation
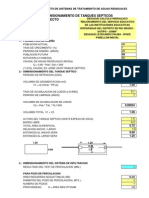
- Calculo Septico I.e.ricardo Palma Pabellon InicialDocument4 pagesCalculo Septico I.e.ricardo Palma Pabellon InicialRicardo AndrePas encore d'évaluation
- Info Cisterna CalculoDocument4 pagesInfo Cisterna CalculoRicardo AndrePas encore d'évaluation
- Tabla de TamicesDocument5 pagesTabla de TamicesRicardo AndrePas encore d'évaluation
- 4 AforoDocument4 pages4 AforoRicardo AndrePas encore d'évaluation
- Memoria Sanitarias CuscoDocument4 pagesMemoria Sanitarias CuscoJuliocesar Santoyo CuriPas encore d'évaluation
- Resistencia de Mat IIDocument7 pagesResistencia de Mat IIRicardo AndrePas encore d'évaluation
- 7.linea de ConduccionDocument1 page7.linea de ConduccionRicardo AndrePas encore d'évaluation
- TRAB 3 Demandas de AguaDocument2 pagesTRAB 3 Demandas de AguaRicardo AndrePas encore d'évaluation
- Predimensionamiento Del EstriboDocument4 pagesPredimensionamiento Del EstriboRicardo AndrePas encore d'évaluation
- 11.laguna de OxidacionDocument16 pages11.laguna de OxidacionRicardo AndrePas encore d'évaluation
- 8 ReservorioDocument2 pages8 ReservorioRicardo AndrePas encore d'évaluation
- Metodo de GumbelDocument9 pagesMetodo de GumbelRicardo AndrePas encore d'évaluation
- Tablas de Cargas y SobrecargasDocument6 pagesTablas de Cargas y SobrecargasRicardo AndrePas encore d'évaluation
- 6.diseño EstructuralDocument2 pages6.diseño EstructuralRicardo AndrePas encore d'évaluation
- Cerchas de MaderaDocument146 pagesCerchas de MaderaRicardo AndrePas encore d'évaluation
- Calculo Viga MaderaDocument9 pagesCalculo Viga MaderakamboralPas encore d'évaluation
- Copia de Máxima Demanda Coliseo LircayDocument2 pagesCopia de Máxima Demanda Coliseo LircayRicardo Andre100% (1)
- Lasestructurasdeconcreto 130108132604 Phpapp01Document26 pagesLasestructurasdeconcreto 130108132604 Phpapp01Ricardo AndrePas encore d'évaluation
- Filosofia Del Diseño de Estructuras de Concreto ArmadoDocument21 pagesFilosofia Del Diseño de Estructuras de Concreto ArmadoRicardo Andre100% (1)
- Albertsons Trabaja en Las Actitudes de Sus EmpleadosDocument6 pagesAlbertsons Trabaja en Las Actitudes de Sus Empleadosmatiaaasd100% (1)
- Taller 1 Modelación Catalina Ramirez y Juliana VelasquezDocument14 pagesTaller 1 Modelación Catalina Ramirez y Juliana VelasquezJuliana Valentina Velásquez RamírezPas encore d'évaluation
- La Fotogrametria Terrestre en ESPAÑA (1914-1958)Document22 pagesLa Fotogrametria Terrestre en ESPAÑA (1914-1958)Galdau Cosmin ConstantinPas encore d'évaluation
- Manual DemoDocument64 pagesManual Demospade81Pas encore d'évaluation
- Absolutismo Infografia Damian-Esteban.Document1 pageAbsolutismo Infografia Damian-Esteban.damian zapataPas encore d'évaluation
- 4 Extensimetros GalgasDocument40 pages4 Extensimetros GalgasAdrianAvilaVillacísPas encore d'évaluation
- Incumplimiento de Normas-Andrea PérezDocument3 pagesIncumplimiento de Normas-Andrea Pérezarperez1990Pas encore d'évaluation
- Crianza de ConejosDocument29 pagesCrianza de ConejosMiguel AngelPas encore d'évaluation
- Puerto Rico Ilustrado PDFDocument91 pagesPuerto Rico Ilustrado PDFFederico Cintron FialloPas encore d'évaluation
- Martí y RodóDocument53 pagesMartí y RodóRodrigo LemosPas encore d'évaluation
- Transportadores NeumáticosDocument15 pagesTransportadores NeumáticosPaoPas encore d'évaluation
- Análisis de Las Perífrasis Verbales "Deber + Infinitivo" y "Deber de + Infinitivo"Document18 pagesAnálisis de Las Perífrasis Verbales "Deber + Infinitivo" y "Deber de + Infinitivo"Nancy Ab100% (1)
- Actividad 5 InnovaciönDocument6 pagesActividad 5 InnovaciönHëïdy Fôrërô0% (2)
- Actividad1 Grupo03Document12 pagesActividad1 Grupo03Andres ZuñigaPas encore d'évaluation
- Superficies CuádricasDocument10 pagesSuperficies CuádricasSol LunaPas encore d'évaluation
- 3t2k La Orden SSDocument484 pages3t2k La Orden SSGlacom Demon100% (13)
- Cómo Dirigir Equipos VirtualesDocument9 pagesCómo Dirigir Equipos VirtualesNetoPas encore d'évaluation
- 2.2.3.4 Packet Tracer - Configuring Initial Switch Settings - ILMDocument7 pages2.2.3.4 Packet Tracer - Configuring Initial Switch Settings - ILMJosimar Sánchez MinotaPas encore d'évaluation
- Programa Educación EspecialDocument2 pagesPrograma Educación EspecialkinivethPas encore d'évaluation
- Cuantificación y Visualización Por Electroforesis de Adn Genómico de Células Vegetales Spinacia Oleracea y Fragaria Ananassa Adn Plasmídico de BacteriasDocument7 pagesCuantificación y Visualización Por Electroforesis de Adn Genómico de Células Vegetales Spinacia Oleracea y Fragaria Ananassa Adn Plasmídico de BacteriasJosephAscencioPas encore d'évaluation
- Reflexiones Sobre La Utilidad de La Comparación y Sus Efectos en La Codificación en Derecho Internacional Privado PDFDocument24 pagesReflexiones Sobre La Utilidad de La Comparación y Sus Efectos en La Codificación en Derecho Internacional Privado PDFadriana_marmolejo_1Pas encore d'évaluation
- Sesión 21 - CasoDocument3 pagesSesión 21 - CasoALEJANDRA SALOMÉ LÓPEZ YUPANQUI46% (13)
- NotasDeClase IngEconomica 21072010Document199 pagesNotasDeClase IngEconomica 21072010Magali Mustaine75% (4)
- Fono 011 Evaluacion Del Procesamiento Linguistico en La Afasia EPLADocument2 pagesFono 011 Evaluacion Del Procesamiento Linguistico en La Afasia EPLASilverhalfPas encore d'évaluation
- Fotográfo NereoDocument2 pagesFotográfo NereoSebas CanossaPas encore d'évaluation
- Defensivo El Juego Sin Balon 1 PDFDocument12 pagesDefensivo El Juego Sin Balon 1 PDFAngel AlvarezPas encore d'évaluation
- 07 Momento AngularDocument4 pages07 Momento AngularOrlando HerradaPas encore d'évaluation
- Unidad 2 - Actividad 4Document9 pagesUnidad 2 - Actividad 4LUIS MOLINAPas encore d'évaluation
- Fichas BibliograficasDocument5 pagesFichas BibliograficasLeon Peña RamosPas encore d'évaluation
- Copia de PROYECTO DE INVESTIGACIÓN EDUCATIVA 1 12wDocument38 pagesCopia de PROYECTO DE INVESTIGACIÓN EDUCATIVA 1 12wSamyPas encore d'évaluation