Vous aimerez peut-être aussi
- Odd K-Line Problem On Citroen C2 - Ideas - MHH AUTO - Page 1Document1 pageOdd K-Line Problem On Citroen C2 - Ideas - MHH AUTO - Page 1Martinito MacraméPas encore d'évaluation
- Motorsport Information: Dallara Volkswagen F317 Formula 3 (2017)Document1 pageMotorsport Information: Dallara Volkswagen F317 Formula 3 (2017)Martinito MacraméPas encore d'évaluation
- Odd K-Line Problem On Citroen C2 - Ideas - MHH AUTO - Page 1Document1 pageOdd K-Line Problem On Citroen C2 - Ideas - MHH AUTO - Page 1Martinito MacraméPas encore d'évaluation
- PEUGEOTDocument55 pagesPEUGEOTChristian Loib100% (1)
- Motorsport Information: Dallara Volkswagen F317 Formula 3 (2017)Document1 pageMotorsport Information: Dallara Volkswagen F317 Formula 3 (2017)Martinito MacraméPas encore d'évaluation
- InfoTech N°3507 Controle Cable D'embrayageDocument2 pagesInfoTech N°3507 Controle Cable D'embrayageMartinito MacraméPas encore d'évaluation
- CANbus Colour ChartDocument2 pagesCANbus Colour ChartMartinito MacraméPas encore d'évaluation
- Manual Display Unit Issue 002 1Document32 pagesManual Display Unit Issue 002 1Martinito MacraméPas encore d'évaluation
- 0 PTRigManualSetup2015Document13 pages0 PTRigManualSetup2015Martinito MacraméPas encore d'évaluation
- Fiesta R2 Caja de CambioDocument14 pagesFiesta R2 Caja de CambioMartinito MacraméPas encore d'évaluation
- Fiesta R2 Caja de CambioDocument14 pagesFiesta R2 Caja de CambioMartinito MacraméPas encore d'évaluation
- Us4873881 PDFDocument9 pagesUs4873881 PDFMartinito MacraméPas encore d'évaluation
- Motec: Pinout Type ADocument2 pagesMotec: Pinout Type AMartinito MacraméPas encore d'évaluation
- ST810 - Advanced Diesel Technology WorkbookDocument119 pagesST810 - Advanced Diesel Technology WorkbookMartinito MacraméPas encore d'évaluation
- Civic Gen 6Document24 pagesCivic Gen 6Martinito MacraméPas encore d'évaluation
- Energy Conversion and Management: M.A. Ceviz, M. AkınDocument6 pagesEnergy Conversion and Management: M.A. Ceviz, M. AkınMartinito MacraméPas encore d'évaluation
- Ignition Advance Curve EstimateDocument6 pagesIgnition Advance Curve EstimateMartinito MacraméPas encore d'évaluation
- 2 ZrfeengDocument19 pages2 Zrfeengrebin1988Pas encore d'évaluation
- Up Rated Spring Instructions English1Document1 pageUp Rated Spring Instructions English1Martinito MacraméPas encore d'évaluation
- IgniteDocument2 pagesIgniteMartinito MacraméPas encore d'évaluation
- Obd-Ii To Display Loom: DatasheetDocument2 pagesObd-Ii To Display Loom: DatasheetMartinito MacraméPas encore d'évaluation
- Datos Vel RPM 02m 02qDocument0 pageDatos Vel RPM 02m 02qMartinito MacraméPas encore d'évaluation
- Improvement and Optimisation of A QOHC V6 Timing System With VALDYNDocument14 pagesImprovement and Optimisation of A QOHC V6 Timing System With VALDYNMartinito MacraméPas encore d'évaluation
- 30 6060 Series2 Spec SheetDocument1 page30 6060 Series2 Spec SheetMartinito MacraméPas encore d'évaluation
- Fiesta ST Sales Brochure 2010Document1 pageFiesta ST Sales Brochure 2010Martinito MacraméPas encore d'évaluation
- 3 8Document18 pages3 8Martinito MacraméPas encore d'évaluation
- 3 8Document18 pages3 8Martinito MacraméPas encore d'évaluation
- S2000 Sales DocumentDocument3 pagesS2000 Sales DocumentMartinito Macramé100% (2)
- WWW - Catcams.be 800x600 Prod01Alist - HTM PN76065xx - JsDocument1 pageWWW - Catcams.be 800x600 Prod01Alist - HTM PN76065xx - JsMartinito MacraméPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Continental Technical Databook 2007-2008Document121 pagesContinental Technical Databook 2007-2008MaxT100% (3)
- Buckeye PD Report: Teodulo Sánchez IncidentDocument12 pagesBuckeye PD Report: Teodulo Sánchez IncidentLatino RebelsPas encore d'évaluation
- Santro CaseDocument17 pagesSantro CaseArunram AtmacharanPas encore d'évaluation
- Subject: Information of New Abs/Abd Unit Models: Korando With Abs/Abd ConditionDocument2 pagesSubject: Information of New Abs/Abd Unit Models: Korando With Abs/Abd Conditionfrancisca19100% (1)
- Owners Manual RichDocument150 pagesOwners Manual Richdchosgo2639Pas encore d'évaluation
- Sandero Stepway BrochureDocument16 pagesSandero Stepway BrochuremotocondriaPas encore d'évaluation
- 2014 LightingDocument27 pages2014 LightingimgtxPas encore d'évaluation
- All New Yaris 2018 PDFDocument9 pagesAll New Yaris 2018 PDFJojo SosorodotanPas encore d'évaluation
- Manual Honda FIT 2015Document10 pagesManual Honda FIT 2015Felipe C. LimaPas encore d'évaluation
- Mitsubishi L200 2011 Owners Manual PDFDocument369 pagesMitsubishi L200 2011 Owners Manual PDFEka KusyantoPas encore d'évaluation
- Manual Ybr 125 PDFDocument53 pagesManual Ybr 125 PDFJavier De La TorrePas encore d'évaluation
- Driver Seat Removal and InstallationDocument3 pagesDriver Seat Removal and InstallationMichael Hernandez100% (1)
- Buku Manual Service Motor HondaDocument4 pagesBuku Manual Service Motor HondaDdiekz Sc50% (2)
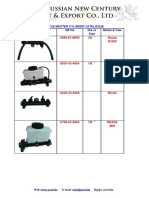
- Brake Master Cylinder Catalogue Picture Oe No Dia or Size Model & YearDocument11 pagesBrake Master Cylinder Catalogue Picture Oe No Dia or Size Model & YearEleazar PavonPas encore d'évaluation
- Form-Scnl-Hse-141-E-R02 - Hse Inspection ChecklistDocument1 pageForm-Scnl-Hse-141-E-R02 - Hse Inspection ChecklistAyo AdebolaPas encore d'évaluation
- UK DVLA Driving License Requirements DG - 068659Document16 pagesUK DVLA Driving License Requirements DG - 068659saket512Pas encore d'évaluation
- Swot Analysis Report On Tata MotorsDocument34 pagesSwot Analysis Report On Tata MotorsRatish Mayank0% (1)
- Oshkosh Bushmaster APV 2006Document4 pagesOshkosh Bushmaster APV 2006dieudecafe100% (1)
- Customer Price List - Peninsular Malaysia (With 0% SST)Document2 pagesCustomer Price List - Peninsular Malaysia (With 0% SST)RAZAKPas encore d'évaluation
- Lotus To AdamsDocument5 pagesLotus To AdamsBruno MrazPas encore d'évaluation
- Cruzetas PDFDocument316 pagesCruzetas PDFWagner DO AmparoPas encore d'évaluation
- Aluma Trailers CatalogDocument24 pagesAluma Trailers CatalogBillPas encore d'évaluation
- Liebherr LH - 30 MDocument1 393 pagesLiebherr LH - 30 MНиколай Мозгов100% (4)
- 5N Basic EquipmentDocument25 pages5N Basic EquipmentAlexPas encore d'évaluation
- WM Porsche 928 Factory Manual - Vol 2Document398 pagesWM Porsche 928 Factory Manual - Vol 29TECHNIK100% (1)
- Last Herb 204 FlowDocument3 pagesLast Herb 204 FlowlastbikesPas encore d'évaluation
- All Content © The Dog & Lemon Guide 2016 - All Rights ReservedDocument3 pagesAll Content © The Dog & Lemon Guide 2016 - All Rights ReservedViktor pPas encore d'évaluation
- BOS MTB - FCV Idylle Rare 2015Document3 pagesBOS MTB - FCV Idylle Rare 2015SickLines0% (1)
- NGK Catalogue 2013 14 LRDocument208 pagesNGK Catalogue 2013 14 LRjonathan220185Pas encore d'évaluation