Vous aimerez peut-être aussi
- TeDocument26 pagesTeAlexandre PrudencioPas encore d'évaluation
- Freeletics Terms BRDocument12 pagesFreeletics Terms BRAlexandre PrudencioPas encore d'évaluation
- CartaDocument1 pageCartaAlexandre PrudencioPas encore d'évaluation
- Apresentação FinalDocument33 pagesApresentação FinalAlexandre PrudencioPas encore d'évaluation
- Aps 2 Fundamentos Da EconomiaDocument1 pageAps 2 Fundamentos Da EconomiaAlexandre PrudencioPas encore d'évaluation
- ObraDocument10 pagesObraAlexandre PrudencioPas encore d'évaluation
- Fazer Os Exercios Desta Aula, Desenhando Perspectiva Isometric ADocument10 pagesFazer Os Exercios Desta Aula, Desenhando Perspectiva Isometric AJenngreyPas encore d'évaluation
- Lei dos Senos e dos Cossenos: Cálculo de Forças ResultantesDocument20 pagesLei dos Senos e dos Cossenos: Cálculo de Forças Resultantescleriston.marques1326100% (1)
- Como Registrar Uma MúsicaDocument3 pagesComo Registrar Uma MúsicaAlexandre PrudencioPas encore d'évaluation
- Apostila - Saúde PúblicaDocument29 pagesApostila - Saúde PúblicaanapaulamoPas encore d'évaluation
- O Rei BondosoDocument2 pagesO Rei BondosoAlexandre PrudencioPas encore d'évaluation
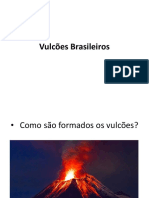
- Vulcões Brasileiros CarolDocument5 pagesVulcões Brasileiros CarolAlexandre PrudencioPas encore d'évaluation
- Topografia 2 - Exercícios de AltimetriaDocument1 pageTopografia 2 - Exercícios de AltimetriaAlexandre PrudencioPas encore d'évaluation
- Por Mais Que o Brasil Possua Um Grande Potencial para Transporte AquaviarioDocument2 pagesPor Mais Que o Brasil Possua Um Grande Potencial para Transporte AquaviarioAlexandre PrudencioPas encore d'évaluation
- Bibliografiasrecomendadas AlexandreMDocument4 pagesBibliografiasrecomendadas AlexandreMLeonaraaaPas encore d'évaluation
- Se Gun Davia 022016Document1 pageSe Gun Davia 022016Alexandre PrudencioPas encore d'évaluation
- Encontro 1 - Bloco 5Document2 pagesEncontro 1 - Bloco 5Alexandre PrudencioPas encore d'évaluation
- Cabeleireiro e Meio AmbienteDocument9 pagesCabeleireiro e Meio AmbienteCriss Santana MoraesPas encore d'évaluation
- ESFDocument10 pagesESFAlexandre PrudencioPas encore d'évaluation
- Plano de Negocios de Uma Empresa de Sondagem de Solo em SPTDocument21 pagesPlano de Negocios de Uma Empresa de Sondagem de Solo em SPTAlexandre PrudencioPas encore d'évaluation
- Instale e licencie o plugin Dibac no SketchUpDocument1 pageInstale e licencie o plugin Dibac no SketchUpAlexandre PrudencioPas encore d'évaluation
- Aula Pratica 27.09Document1 pageAula Pratica 27.09Alexandre PrudencioPas encore d'évaluation
- Economia Unid 2 e 3 UnilavrasDocument13 pagesEconomia Unid 2 e 3 UnilavrasAlexandre PrudencioPas encore d'évaluation
- 10gafesquevocnopodecometernumaentrevistadeemprego 150817182010 Lva1 App6892Document16 pages10gafesquevocnopodecometernumaentrevistadeemprego 150817182010 Lva1 App6892Alexandre PrudencioPas encore d'évaluation
- Alvenaria Estrutural - Recomendações e TraçosDocument36 pagesAlvenaria Estrutural - Recomendações e TraçosFranca-sp FrançaPas encore d'évaluation
- DR 2016 - FcaDocument102 pagesDR 2016 - FcaAlexandre PrudencioPas encore d'évaluation
- Cristiane Carlos Monteiro: ObjetivoDocument1 pageCristiane Carlos Monteiro: ObjetivoAlexandre PrudencioPas encore d'évaluation
- 542790Document1 page542790Alexandre PrudencioPas encore d'évaluation
- APS1Document3 pagesAPS1Alexandre PrudencioPas encore d'évaluation
- Aula Pratica 27.09Document1 pageAula Pratica 27.09Alexandre PrudencioPas encore d'évaluation
- Aula 7 Cisalhamento Puro (Ajustado)Document27 pagesAula 7 Cisalhamento Puro (Ajustado)Gabriela MellerPas encore d'évaluation
- Simulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesDocument3 pagesSimulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesJose Felipe Lopes100% (1)
- Matemática Financeira e Fluxo de CaixaDocument38 pagesMatemática Financeira e Fluxo de CaixaCP Santa MariaPas encore d'évaluation
- Esquema elétrico de um sistema de controle de motoresDocument1 pageEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaPas encore d'évaluation
- Fundamentos de Eletrotécnica para Técnicos em EletrônicaDocument221 pagesFundamentos de Eletrotécnica para Técnicos em EletrônicaVilson Pimmel100% (1)
- Lotomática 2 - Valor PosicionalDocument2 pagesLotomática 2 - Valor PosicionalGeraldo JuniorPas encore d'évaluation
- Os SonhosDocument58 pagesOs SonhosAPPARATOR100% (4)
- DissertaçãoDocument134 pagesDissertaçãofabioriemannPas encore d'évaluation
- Física: Cinemática e DinâmicaDocument75 pagesFísica: Cinemática e DinâmicaLaerte Rafael SchneiderPas encore d'évaluation
- Exercícios de Fixação - TRANSCALDocument14 pagesExercícios de Fixação - TRANSCALGabriela OliverPas encore d'évaluation
- 10 1 1 468 539 PDFDocument295 pages10 1 1 468 539 PDFVitor HugoPas encore d'évaluation
- Guia para certificação PBQP-HDocument26 pagesGuia para certificação PBQP-HLorena SoaresPas encore d'évaluation
- Métodos emergentes de conservação de alimentos por radiação microondasDocument39 pagesMétodos emergentes de conservação de alimentos por radiação microondasMárcia RodriguesPas encore d'évaluation
- Apostila Res Mat Outubro 2012-Atualizada PDFDocument168 pagesApostila Res Mat Outubro 2012-Atualizada PDFMaria Isabel LopesPas encore d'évaluation
- Rosalind KraussDocument14 pagesRosalind KraussMariana GamaPas encore d'évaluation
- Resumo FQ - Teoria Ácido-BaseDocument11 pagesResumo FQ - Teoria Ácido-BasecarlaPas encore d'évaluation
- Lista de exercícios matemáticosDocument2 pagesLista de exercícios matemáticosSamuel Vilela de LimaPas encore d'évaluation
- 6 Paquimetro Sistema Ingles PDFDocument9 pages6 Paquimetro Sistema Ingles PDFLuciano BroboskiPas encore d'évaluation
- Lista Afim Quad Mod ExtraDocument71 pagesLista Afim Quad Mod ExtraCristina MariaPas encore d'évaluation
- Índices de refração de líquidos com refractômetro de AbbeDocument44 pagesÍndices de refração de líquidos com refractômetro de AbbeTomás MahalambePas encore d'évaluation
- MPCDocument19 pagesMPCRúben BarbosaPas encore d'évaluation
- Panorama histórico da estatísticaDocument15 pagesPanorama histórico da estatísticaEduardo Debiasi Andrade100% (1)
- Isoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDocument24 pagesIsoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDavid XavierPas encore d'évaluation
- Antissuborno PDFDocument63 pagesAntissuborno PDFAna Cristina SouzaPas encore d'évaluation
- Relatório de FlambagemDocument26 pagesRelatório de FlambagemRaphael Rodrigues MirandaPas encore d'évaluation
- Aula 06 - Matemática - Henrique Maia - Potenciação e RadiciaçãoDocument4 pagesAula 06 - Matemática - Henrique Maia - Potenciação e RadiciaçãoHenrique MaiaPas encore d'évaluation
- Geometria Espacial - Cilindros - Exercicios PDFDocument13 pagesGeometria Espacial - Cilindros - Exercicios PDFLukasVictorPas encore d'évaluation
- PEF5917 - Exercícios de deformação de sólidosDocument7 pagesPEF5917 - Exercícios de deformação de sólidosJohnny LópezPas encore d'évaluation
- O realismo em Popper e Peirce: um contraponto filosóficoDocument13 pagesO realismo em Popper e Peirce: um contraponto filosóficoRaquel Rosalia AdamiPas encore d'évaluation
- Lista de DeterminantesDocument7 pagesLista de DeterminantesJoão Pedro100% (1)
- A melhor estratégia é atitude: Bora venderD'EverandA melhor estratégia é atitude: Bora venderÉvaluation : 5 sur 5 étoiles5/5 (10)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IAD'EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IAÉvaluation : 5 sur 5 étoiles5/5 (6)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineD'EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineÉvaluation : 4 sur 5 étoiles4/5 (4)
- Eletricista Residencial E PredialD'EverandEletricista Residencial E PredialÉvaluation : 3 sur 5 étoiles3/5 (1)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeD'EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeÉvaluation : 5 sur 5 étoiles5/5 (3)
- Motores automotivos: evolução, manutenção e tendênciasD'EverandMotores automotivos: evolução, manutenção e tendênciasÉvaluation : 5 sur 5 étoiles5/5 (1)
- Python e mercado financeiro: Programação para estudantes, investidores e analistasD'EverandPython e mercado financeiro: Programação para estudantes, investidores e analistasÉvaluation : 5 sur 5 étoiles5/5 (3)
- Inteligência artificial: Análise de dados e inovação para iniciantesD'EverandInteligência artificial: Análise de dados e inovação para iniciantesPas encore d'évaluation
- Arquitetura de software distribuído: Boas práticas para um mundo de microsserviçosD'EverandArquitetura de software distribuído: Boas práticas para um mundo de microsserviçosPas encore d'évaluation
- Manual Do Proprietário - Para Operação, Uso E Manutenção Das Edificações Residenciais.D'EverandManual Do Proprietário - Para Operação, Uso E Manutenção Das Edificações Residenciais.Évaluation : 5 sur 5 étoiles5/5 (1)
- Orientação a Objetos em C#: Conceitos e implementações em .NETD'EverandOrientação a Objetos em C#: Conceitos e implementações em .NETÉvaluation : 5 sur 5 étoiles5/5 (1)
- Estruturas de Dados: Domine as práticas essenciais em C, Java, C#, Python e JavaScriptD'EverandEstruturas de Dados: Domine as práticas essenciais em C, Java, C#, Python e JavaScriptPas encore d'évaluation
- Nr-12 - Segurança No Trabalho Em Máquinas E EquipamentosD'EverandNr-12 - Segurança No Trabalho Em Máquinas E EquipamentosPas encore d'évaluation
- Introdução a Data Science: Algoritmos de Machine Learning e métodos de análiseD'EverandIntrodução a Data Science: Algoritmos de Machine Learning e métodos de análisePas encore d'évaluation
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaD'EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaÉvaluation : 5 sur 5 étoiles5/5 (1)
- Programação Didática com Linguagem CD'EverandProgramação Didática com Linguagem CÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)