Vous aimerez peut-être aussi
- 10 DeblurringDocument146 pages10 DeblurringCharan PrudhviPas encore d'évaluation
- Big-O Cheatsheet - Sheet1Document3 pagesBig-O Cheatsheet - Sheet1Charan PrudhviPas encore d'évaluation
- BirdbrainDocument1 pageBirdbrainplastonePas encore d'évaluation
- RestaurantsDocument2 pagesRestaurantsCharan PrudhviPas encore d'évaluation
- Read Me FirstDocument2 pagesRead Me FirstCharan PrudhviPas encore d'évaluation
- BirdbrainDocument1 pageBirdbrainplastonePas encore d'évaluation
- Pubmed ResultDocument5 pagesPubmed ResultRegulatedZPas encore d'évaluation
- RM LinksDocument1 pageRM LinksCharan PrudhviPas encore d'évaluation
- BirdbrainDocument1 pageBirdbrainplastonePas encore d'évaluation
- 3Document102 pages3Manjula AshokPas encore d'évaluation
- 3 15041 LibraryDocument6 pages3 15041 LibraryRohit AhujaPas encore d'évaluation
- Btech Cloud Course Hand OutDocument15 pagesBtech Cloud Course Hand OutCharan PrudhviPas encore d'évaluation
- Active City AdministrationDocument3 pagesActive City AdministrationCharan PrudhviPas encore d'évaluation
- Charan As Am Always Char AnDocument1 pageCharan As Am Always Char AnCharan PrudhviPas encore d'évaluation
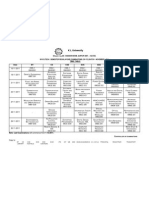
- K L University Nov 2011 Time Table for Regular End ExamsDocument1 pageK L University Nov 2011 Time Table for Regular End ExamsCharan PrudhviPas encore d'évaluation
- SMRTDocument7 pagesSMRTCharan PrudhviPas encore d'évaluation
- Dos Path For CDocument1 pageDos Path For CCharan PrudhviPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Wind farm project NPV and LCOE analysisDocument5 pagesWind farm project NPV and LCOE analysisPedro Galvani72% (32)
- School Paper Management: Dennis M. VidarDocument36 pagesSchool Paper Management: Dennis M. VidarMary Ann AysonPas encore d'évaluation
- BASH Shell Scripting SyllabusDocument4 pagesBASH Shell Scripting SyllabusAdzmely Mansor100% (1)
- Badger Range Guard Wet Chemical Cylinder Assemblies: FeaturesDocument4 pagesBadger Range Guard Wet Chemical Cylinder Assemblies: FeaturesLee WenjianPas encore d'évaluation
- SUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Document54 pagesSUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Ravi Kumar100% (3)
- SAIC-A-2009 Rev 2Document5 pagesSAIC-A-2009 Rev 2ரமேஷ் பாலக்காடுPas encore d'évaluation
- Plexus 2 DocumentationDocument29 pagesPlexus 2 DocumentationHeberto MonroyPas encore d'évaluation
- Watershed & Four Water ConceptDocument31 pagesWatershed & Four Water ConceptNarendra SinghPas encore d'évaluation
- Nov-23 Main Fcom QRH FCTM Changes A320Document17 pagesNov-23 Main Fcom QRH FCTM Changes A320Joe FalchettoPas encore d'évaluation
- 199408Document93 pages199408denis alvarezPas encore d'évaluation
- StradaDocument4 pagesStradayzk14Pas encore d'évaluation
- MVC & Web Api - MCQ: Duration: 30mins Marks: 20Document3 pagesMVC & Web Api - MCQ: Duration: 30mins Marks: 20ManuPcPas encore d'évaluation
- Dome AbcsDocument1 pageDome AbcsRiddhi BhutadaPas encore d'évaluation
- Lecture 4-Unit 1 Lesson 4Document23 pagesLecture 4-Unit 1 Lesson 4Jameel MalikPas encore d'évaluation
- Hioki 3554 Battery Tester ManualDocument89 pagesHioki 3554 Battery Tester ManualAndriGunawanPas encore d'évaluation
- Host 1Document6 pagesHost 1Lukman FafaPas encore d'évaluation
- Strategic Human Resource Development I SlidesDocument26 pagesStrategic Human Resource Development I SlidesAbhiman Behera50% (2)
- LOR Engineering Excellence Journal 2013Document77 pagesLOR Engineering Excellence Journal 2013marcinek77Pas encore d'évaluation
- 1302 FF6SF6DosingMachine 0Document3 pages1302 FF6SF6DosingMachine 0Fawzi ChakirPas encore d'évaluation
- Classful IP Addressing (Cont.) : Address Prefix Address SuffixDocument25 pagesClassful IP Addressing (Cont.) : Address Prefix Address SuffixGetachew ShambelPas encore d'évaluation
- Food Safety ChecklistDocument5 pagesFood Safety ChecklistDenver Palingit Rimas100% (3)
- Understanding Calculation ScriptsDocument17 pagesUnderstanding Calculation ScriptsKrishna TilakPas encore d'évaluation
- Automated Car Parking System DocumentationDocument5 pagesAutomated Car Parking System DocumentationVamsiVaddadiPas encore d'évaluation
- Stresses, Loads, and Factors of Safety in Structural ElementsDocument6 pagesStresses, Loads, and Factors of Safety in Structural ElementsMark Louies Mago VillarosaPas encore d'évaluation
- Cable Diagram: Technical Data SheetDocument1 pageCable Diagram: Technical Data SheetCharlie MendozaPas encore d'évaluation
- NT Photocurre Ed Unmultipli Primary NT Photocurre MultipliedDocument50 pagesNT Photocurre Ed Unmultipli Primary NT Photocurre Multipliedmayuri sritharanPas encore d'évaluation
- DA 65we EnglishDocument2 pagesDA 65we EnglishAlvin NguyenPas encore d'évaluation
- Indicator Valve Maintenance GuideDocument15 pagesIndicator Valve Maintenance GuideJonoAlexisDang-awanQuiban100% (1)
- Barrera BANNER 2 PDFDocument10 pagesBarrera BANNER 2 PDFrollinga2013Pas encore d'évaluation
- Visit To Kadana Hydro Power Plant and Wanakbori Thermal Power Plant.Document5 pagesVisit To Kadana Hydro Power Plant and Wanakbori Thermal Power Plant.Kunal VaghasiyaPas encore d'évaluation