Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- MDEC Stationary DieselDocument5 pagesMDEC Stationary DieselAhmad Shahrul Mohamed100% (2)
- IRF510Document8 pagesIRF510aj_oaomvPas encore d'évaluation
- Hy27uf084g2m Series (Rev.0.7)Document49 pagesHy27uf084g2m Series (Rev.0.7)aj_oaomvPas encore d'évaluation
- JM 20329Document2 pagesJM 20329aj_oaomvPas encore d'évaluation
- Win7 GPTDocument2 pagesWin7 GPTaj_oaomvPas encore d'évaluation
- PS2251Document19 pagesPS2251ajoaomvPas encore d'évaluation
- VT52, VT100, ANSI terminal emulation protocols for microcontrollersDocument1 pageVT52, VT100, ANSI terminal emulation protocols for microcontrollersaj_oaomvPas encore d'évaluation
- Hy27uf084g2m Series (Rev.0.7)Document49 pagesHy27uf084g2m Series (Rev.0.7)aj_oaomvPas encore d'évaluation
- License Cache Allegro 16.6Document1 pageLicense Cache Allegro 16.6aj_oaomvPas encore d'évaluation
- M33Document1 pageM33aj_oaomvPas encore d'évaluation
- Uc ManetteDocument58 pagesUc Manettehammouche_soufianePas encore d'évaluation
- Compal La 6901p r01 SchematicsDocument60 pagesCompal La 6901p r01 Schematicsscobie_21Pas encore d'évaluation
- IRF510Document3 pagesIRF510Luciano Ruben GomezPas encore d'évaluation
- NHD 0420DZ NSW BBW 30101Document11 pagesNHD 0420DZ NSW BBW 30101aj_oaomvPas encore d'évaluation
- Teensy++2.0 TopDocument1 pageTeensy++2.0 Topaj_oaomvPas encore d'évaluation
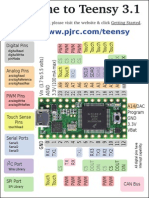
- Teensy 3.1 BotDocument1 pageTeensy 3.1 Botaj_oaomvPas encore d'évaluation
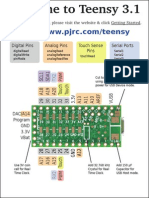
- Teensy 3.1 TopDocument1 pageTeensy 3.1 Topaj_oaomvPas encore d'évaluation
- Iris Power RIV Camera System: Rotor-in-Place Visual Inspection of Rotating MachinesDocument2 pagesIris Power RIV Camera System: Rotor-in-Place Visual Inspection of Rotating MachinesamirPas encore d'évaluation
- Est1 PDFDocument24 pagesEst1 PDFchakrounePas encore d'évaluation
- Echodrive 22m1a PDFDocument2 pagesEchodrive 22m1a PDFJhon ConstantinePas encore d'évaluation
- Max77960 Max77961Document83 pagesMax77960 Max77961bubai karPas encore d'évaluation
- TalkdeskDocument4 pagesTalkdeskNiel DariusPas encore d'évaluation
- Voltage and Current Divider TheoremDocument8 pagesVoltage and Current Divider TheoremDavid Pogi MenesesPas encore d'évaluation
- Chapter 3 So2Document29 pagesChapter 3 So2Carlos Miguel Victoriano TolentinoPas encore d'évaluation
- Lighthouse Report Viewer - 8Document6 pagesLighthouse Report Viewer - 8oh hayoungPas encore d'évaluation
- PBC 6500 Test PDFDocument5 pagesPBC 6500 Test PDFAhmedAbdoPas encore d'évaluation
- Computer Concepts and C Programming Unit 12310CCP13 by Sushma Shetty PDFDocument130 pagesComputer Concepts and C Programming Unit 12310CCP13 by Sushma Shetty PDFDivya ShriPas encore d'évaluation
- ZTP1203B Series 2015 1Document2 pagesZTP1203B Series 2015 1Petros ZoisPas encore d'évaluation
- IMD UbaDocument12 pagesIMD UbaWalter RossiPas encore d'évaluation
- LG 22ld350-cb Chassis Lc01aDocument34 pagesLG 22ld350-cb Chassis Lc01aJuan Pablo Montoya CardenasPas encore d'évaluation
- EN - o12-GE-EXP6-PW0-StudentDocument3 pagesEN - o12-GE-EXP6-PW0-StudentMarie Myriam Maria MarryPas encore d'évaluation
- UntitledDocument97 pagesUntitledaltheaPas encore d'évaluation
- Dip Switch Settings ReadDocument3 pagesDip Switch Settings ReadRuzhen Dimitrov100% (1)
- Readme Win10 x64 5in1 Oct2015Document2 pagesReadme Win10 x64 5in1 Oct2015Frumuzache FlorinPas encore d'évaluation
- Chapter04 ProcessorDocument209 pagesChapter04 ProcessorAbdul ThowfeeqPas encore d'évaluation
- High Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesDocument48 pagesHigh Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesDPas encore d'évaluation
- NFC ExplainedDocument54 pagesNFC Explainedmandeep2610Pas encore d'évaluation
- SK Idcbookextract Scada PLCDocument44 pagesSK Idcbookextract Scada PLCgargi palPas encore d'évaluation
- PCB GuideDocument1 pagePCB GuideMallappa PatilPas encore d'évaluation
- DP610SACB ManualDocument24 pagesDP610SACB ManualChase SmythePas encore d'évaluation
- 250 - Windows ShellcodingDocument116 pages250 - Windows ShellcodingSaw GyiPas encore d'évaluation
- FC Csp423 PDF TiDocument1 pageFC Csp423 PDF TiEmilyPas encore d'évaluation
- Chapter 03 - The Visible ComputerDocument43 pagesChapter 03 - The Visible ComputerJosh CarterPas encore d'évaluation
- GA22-7286-01 System Z Parallel Sysplex RecoveryDocument368 pagesGA22-7286-01 System Z Parallel Sysplex RecoveryPriya EkambaramPas encore d'évaluation
- DataengieerDocument23 pagesDataengieerAbitha K SPas encore d'évaluation
- Super Series Digital Torque Wrenches Technical SpecificationDocument3 pagesSuper Series Digital Torque Wrenches Technical SpecificationJulian Andrés Garcia SánchezPas encore d'évaluation