Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Indian PaintersDocument23 pagesIndian PaintersTimothy Martinez100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Chapter 01Document30 pagesChapter 01Timothy MartinezPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Chapter 7Document25 pagesChapter 7Timothy MartinezPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- J-Bubbler PC: The Ultimate OptionDocument2 pagesJ-Bubbler PC: The Ultimate OptionTimothy MartinezPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Mechanical SpringsDocument76 pagesMechanical SpringsTimothy MartinezPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Fatigue Failure Resulting From Variable LoadingDocument67 pagesFatigue Failure Resulting From Variable LoadingTimothy Martinez100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Failures Resulting From Static LoadingDocument36 pagesFailures Resulting From Static LoadingTimothy MartinezPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- QuexBook TutorialDocument14 pagesQuexBook TutorialJeffrey FarillasPas encore d'évaluation
- Buried PipelinesDocument93 pagesBuried PipelinesVasant Kumar VarmaPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Man As God Created Him, ThemDocument3 pagesMan As God Created Him, ThemBOEN YATORPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Music 10 (2nd Quarter)Document8 pagesMusic 10 (2nd Quarter)Dafchen Villarin MahasolPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 16783Document51 pages16783uddinnadeemPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
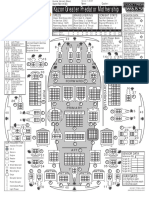
- Kazon Greater Predator MothershipDocument1 pageKazon Greater Predator MothershipknavealphaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Astm B19Document6 pagesAstm B19Davor IbarraPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Rom 2 - 0-11 (En)Document132 pagesRom 2 - 0-11 (En)Mara HerreraPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Lesson 3 - ReviewerDocument6 pagesLesson 3 - ReviewerAdrian MarananPas encore d'évaluation
- Desktop 9 QA Prep Guide PDFDocument15 pagesDesktop 9 QA Prep Guide PDFPikine LebelgePas encore d'évaluation
- Eloy-Stock English Full PDFDocument0 pageEloy-Stock English Full PDFR.s. WartsPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Export Management EconomicsDocument30 pagesExport Management EconomicsYash SampatPas encore d'évaluation
- Introduction To Screenwriting UEADocument12 pagesIntroduction To Screenwriting UEAMartín SalasPas encore d'évaluation
- John L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDocument12 pagesJohn L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDivya AggarwalPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Fire Protection in BuildingsDocument2 pagesFire Protection in BuildingsJames Carl AriesPas encore d'évaluation
- Global Divides: The North and The South: National University Sports AcademyDocument32 pagesGlobal Divides: The North and The South: National University Sports AcademyYassi CurtisPas encore d'évaluation
- Unsuccessful MT-SM DeliveryDocument2 pagesUnsuccessful MT-SM DeliveryPitam MaitiPas encore d'évaluation
- Close Enough To Touch by Victoria Dahl - Chapter SamplerDocument23 pagesClose Enough To Touch by Victoria Dahl - Chapter SamplerHarlequinAustraliaPas encore d'évaluation
- Nanolithography - Processing Methods PDFDocument10 pagesNanolithography - Processing Methods PDFNilesh BhardwajPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Recitation Math 001 - Term 221 (26166)Document36 pagesRecitation Math 001 - Term 221 (26166)Ma NaPas encore d'évaluation
- The Covenant Taken From The Sons of Adam Is The FitrahDocument10 pagesThe Covenant Taken From The Sons of Adam Is The FitrahTyler FranklinPas encore d'évaluation
- Assessment of The Genitourinary System: GeneralDocument2 pagesAssessment of The Genitourinary System: GeneralMaharani UtamiPas encore d'évaluation
- Teaching Profession - Educational PhilosophyDocument23 pagesTeaching Profession - Educational PhilosophyRon louise PereyraPas encore d'évaluation
- Head Coverings BookDocument86 pagesHead Coverings BookRichu RosarioPas encore d'évaluation
- Modlist - Modlist 1.4Document145 pagesModlist - Modlist 1.4Tattorin vemariaPas encore d'évaluation
- Cooperative Learning: Complied By: ANGELICA T. ORDINEZADocument16 pagesCooperative Learning: Complied By: ANGELICA T. ORDINEZAAlexis Kaye GullaPas encore d'évaluation
- (1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsDocument102 pages(1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsHerbert Hillary Booker 2nd100% (1)
- QSP 04bDocument35 pagesQSP 04bakrastogi94843Pas encore d'évaluation
- Core ValuesDocument1 pageCore ValuesIan Abel AntiverosPas encore d'évaluation
- Jakub - BaZi CalculatorDocument3 pagesJakub - BaZi Calculatorpedro restinxPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)