Vous aimerez peut-être aussi
- Chapitre3 VariateursDocument15 pagesChapitre3 VariateursKAOUTAR ELALAMIPas encore d'évaluation
- A. Premier Cas: Ve2 Ve1Document2 pagesA. Premier Cas: Ve2 Ve1BOURAS Ihabe - بوراس إيهابPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- DocimologieDocument103 pagesDocimologieHafsa Grande Corazon100% (1)
- Rapport de Stage - Administration Réseau Et Dévéloppement WebDocument41 pagesRapport de Stage - Administration Réseau Et Dévéloppement Webnajm3dPas encore d'évaluation
- ImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1Document1 239 pagesImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1michael ourdanPas encore d'évaluation
- Procedure Des Traitement Des Actions Correctives Et PreventivesDocument2 pagesProcedure Des Traitement Des Actions Correctives Et PreventivesAbdelatif Hr100% (1)
- Ecran Star War Force Est Destinée V0.1.Document5 pagesEcran Star War Force Est Destinée V0.1.ElendrakPas encore d'évaluation
- Commande PWM Moteurs PDFDocument5 pagesCommande PWM Moteurs PDFerno785Pas encore d'évaluation
- Asservissement de Vitesse PID D'un MoteurDocument15 pagesAsservissement de Vitesse PID D'un MoteurMohamed Riyad Boudallaa100% (1)
- Arduino Parametragehc06Document4 pagesArduino Parametragehc06Hyacinthe Kossi100% (1)
- Capteur Guerbaoui 2020Document45 pagesCapteur Guerbaoui 2020driss chakdaliPas encore d'évaluation
- Magnetisme 2Document17 pagesMagnetisme 2hamma_meskiniPas encore d'évaluation
- Matière Electronique Systèmes PDFDocument71 pagesMatière Electronique Systèmes PDFYassine BelhmerPas encore d'évaluation
- 1 Energie ProfDocument10 pages1 Energie ProfSab RinaPas encore d'évaluation
- Mini ProjetDocument2 pagesMini ProjetPretty Bea100% (1)
- TP8 MCCprofDocument8 pagesTP8 MCCprofPatrick DelsolPas encore d'évaluation
- Programmation Et Réalisation DDocument16 pagesProgrammation Et Réalisation DAbdelltif BellouchPas encore d'évaluation
- Contrôler Le Moteur Pas À Pas 28BYJDocument18 pagesContrôler Le Moteur Pas À Pas 28BYJEmmanuel MaïPas encore d'évaluation
- TP 3Document9 pagesTP 3ayat100% (1)
- Simulation D'une Carte de Commande A Base de PicDocument63 pagesSimulation D'une Carte de Commande A Base de Pictanweer100% (1)
- Classe BDocument5 pagesClasse BSami Zakhnouf100% (1)
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- Chap 1 Et 2 Electronique de Puissance PDFDocument41 pagesChap 1 Et 2 Electronique de Puissance PDFmbm voyagePas encore d'évaluation
- RattrapDocument12 pagesRattrapAmada TarekPas encore d'évaluation
- MemoireDocument85 pagesMemoireGherib AlmoutassimbellahPas encore d'évaluation
- PWMDocument11 pagesPWMYOKO SawaPas encore d'évaluation
- Protection DiodeDocument44 pagesProtection DiodeAeh Nabilium100% (1)
- Fonctionnement Et Contrôle Des Composants Électroniques Par BENYAROU Mourad PDFDocument13 pagesFonctionnement Et Contrôle Des Composants Électroniques Par BENYAROU Mourad PDFMiliani AhmedPas encore d'évaluation
- 2 - Fiche de Séquence1Document5 pages2 - Fiche de Séquence1hamza darrarPas encore d'évaluation
- Devoir Controle Convert - StatDocument4 pagesDevoir Controle Convert - StatAbdelbaki ElfahemPas encore d'évaluation
- Travaux Dirigés FPGA & VHDL - 2Document28 pagesTravaux Dirigés FPGA & VHDL - 2simohamed1993Pas encore d'évaluation
- Rapport PDFDocument35 pagesRapport PDFOùšsàmà ßén SàïédPas encore d'évaluation
- Nouveau Document Microsoft WordDocument22 pagesNouveau Document Microsoft WordHamza HamzaPas encore d'évaluation
- Ampli 100wDocument15 pagesAmpli 100wbabo25Pas encore d'évaluation
- Compte Rendu Syst Embarqué FinalDocument44 pagesCompte Rendu Syst Embarqué FinalHIHI KHALIDPas encore d'évaluation
- Demi PontDocument9 pagesDemi PontOlivier OuinaPas encore d'évaluation
- Liste Des Sujets 2016 2017 M MecatroniqueDocument3 pagesListe Des Sujets 2016 2017 M MecatroniqueMohamed OuladPas encore d'évaluation
- QCM Demarrage EleveDocument1 pageQCM Demarrage EleveZ08SPas encore d'évaluation
- Mini Projet Thermomètre À Base de Pic 16F877Document10 pagesMini Projet Thermomètre À Base de Pic 16F877Manel Ouled Ahmed100% (1)
- Rapport Du DevoirDocument18 pagesRapport Du DevoirRachid Afkari100% (1)
- OscilloscopeDocument15 pagesOscilloscopeEdidjo Darwin100% (1)
- Ondulaut PDFDocument13 pagesOndulaut PDFKarim ZaraiPas encore d'évaluation
- Moteur Pas - À-Pas Chapitre 2Document7 pagesMoteur Pas - À-Pas Chapitre 2Adel Haddad HauntedPas encore d'évaluation
- Filtres A Capacité CommutéeDocument17 pagesFiltres A Capacité Commutéeyoussed88Pas encore d'évaluation
- Série de TD N°1 QuestionsDocument3 pagesSérie de TD N°1 Questionsakkal saadiPas encore d'évaluation
- Mini ProjetDocument18 pagesMini ProjetAli AourdouPas encore d'évaluation
- MCC - Variation de VitesseDocument2 pagesMCC - Variation de VitesseBochra Ammous100% (1)
- Cours-Module APDocument27 pagesCours-Module APBoualem MokhtariaPas encore d'évaluation
- Formulaire STI2DDocument4 pagesFormulaire STI2DAmélie DuboisPas encore d'évaluation
- Calcul Dissipateur ThermiqueDocument8 pagesCalcul Dissipateur ThermiqueFouquetPas encore d'évaluation
- Presentation Du Pic 16f877 PDFDocument22 pagesPresentation Du Pic 16f877 PDFyoussefPas encore d'évaluation
- Fascicule CAO Electronique TP3Document8 pagesFascicule CAO Electronique TP3Kyle LylyPas encore d'évaluation
- TD2 2ing GMDocument1 pageTD2 2ing GMahaweni004Pas encore d'évaluation
- Comande Redressement PDFDocument26 pagesComande Redressement PDFhafosaamrPas encore d'évaluation
- Les CapteursDocument13 pagesLes CapteursLandry NjikamPas encore d'évaluation
- PIC16F84Document22 pagesPIC16F84Rida bellarranePas encore d'évaluation
- TD 3 Elt IndDocument2 pagesTD 3 Elt IndFarouk BoukorttPas encore d'évaluation
- TP Introduction Aux Mesures ÉlectriquesDocument6 pagesTP Introduction Aux Mesures ÉlectriquesMateo Pasquier-bodioPas encore d'évaluation
- Aop 11Document8 pagesAop 11stefanPas encore d'évaluation
- Exercices EnoncésA Transfo.2ph Ibti - RachDocument7 pagesExercices EnoncésA Transfo.2ph Ibti - RachKaparoNedMarPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- Identification Radiofréquence: Le rôle de la RFID dans les domaines émergents de l'Internet des objets et de l'Internet des nano-objetsD'EverandIdentification Radiofréquence: Le rôle de la RFID dans les domaines émergents de l'Internet des objets et de l'Internet des nano-objetsPas encore d'évaluation
- RDMDocument87 pagesRDMWissem Ben YahiaPas encore d'évaluation
- Correction Examen AMVENITDocument4 pagesCorrection Examen AMVENITzaidifaroukPas encore d'évaluation
- Treille Bateau (Sujet Non Corriger)Document11 pagesTreille Bateau (Sujet Non Corriger)zaidifaroukPas encore d'évaluation
- TestenitDocument1 pageTestenitzaidifaroukPas encore d'évaluation
- Cours PerfoguicheteauDocument110 pagesCours PerfoguicheteauzaidifaroukPas encore d'évaluation
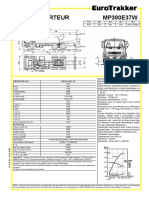
- FT Iveco Eurotrakker MP 380 e 37 W Francais PDFDocument2 pagesFT Iveco Eurotrakker MP 380 e 37 W Francais PDFSaidi JalelPas encore d'évaluation
- Notice 4010Document58 pagesNotice 4010jalouzPas encore d'évaluation
- Transmettre Des Données Avec l'URL: Informations Sur Le TutorielDocument10 pagesTransmettre Des Données Avec l'URL: Informations Sur Le TutorielHicham MoutchouPas encore d'évaluation
- Gestion de Parc Auto: EnjeuxDocument8 pagesGestion de Parc Auto: EnjeuxDavid K. CophiePas encore d'évaluation
- Devis ChateauDocument1 pageDevis ChateauAlex AdamxPas encore d'évaluation
- 981 Em15042013Document18 pages981 Em15042013elmoudjahid_dzPas encore d'évaluation
- 2013 TH18334 Fixot Jean PDFDocument190 pages2013 TH18334 Fixot Jean PDFhubPas encore d'évaluation
- 1-Introduction Regulation PDFDocument14 pages1-Introduction Regulation PDFMed Ben Ahmed100% (1)
- Elaborer Un SdsiDocument60 pagesElaborer Un Sdsizoomtn0% (1)
- Serie 3Document3 pagesSerie 3amine dhaouiPas encore d'évaluation
- TecnAlarme PDFDocument44 pagesTecnAlarme PDFSemou DioufPas encore d'évaluation
- FI IMB-37261 C V6C4-PETU-8 Place Anatole FranceDocument17 pagesFI IMB-37261 C V6C4-PETU-8 Place Anatole FrancembaitemrarrPas encore d'évaluation
- Publication 24Document1 pagePublication 24zanazePas encore d'évaluation
- TD S+ Rie06Document2 pagesTD S+ Rie06FiroDjinsoNanoPas encore d'évaluation
- Technique CapitolDocument8 pagesTechnique Capitolformagnifique.francePas encore d'évaluation
- Methode - ABC (Mode de Compatibilite) - CopieDocument19 pagesMethode - ABC (Mode de Compatibilite) - CopieSaloua Fennich100% (1)
- TP PcvueDocument2 pagesTP PcvueMohamed ElbanadiPas encore d'évaluation
- Micro Swimmer RobotDocument8 pagesMicro Swimmer RobotAlvaroEnriqueQuinterosPas encore d'évaluation
- Projet NeuromimetiqueDocument18 pagesProjet NeuromimetiqueKhadidja KssPas encore d'évaluation
- Hwe 100Document79 pagesHwe 100Yavuz ErcanliPas encore d'évaluation
- Outillage Sanitaire - Mesure 2000Document66 pagesOutillage Sanitaire - Mesure 2000Camelia SmahanPas encore d'évaluation
- M50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFDocument2 pagesM50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFCertyouFormationPas encore d'évaluation
- Les Chaudiere A Vaporisation SimoDocument2 pagesLes Chaudiere A Vaporisation SimoCHOUKRI KamalPas encore d'évaluation
- HM012F-Banc Pertes de ChargesDocument56 pagesHM012F-Banc Pertes de ChargesAmor GharsalliPas encore d'évaluation
- Soft ProcessorsDocument17 pagesSoft ProcessorsSmirnov ArtaéévPas encore d'évaluation