Vous aimerez peut-être aussi
- FMS Practica1 SegundaUnidad Compensación de Herramientas en Radio y AlturaDocument20 pagesFMS Practica1 SegundaUnidad Compensación de Herramientas en Radio y AlturaSuriPas encore d'évaluation
- Códigos G y Compensación de HerramientasDocument5 pagesCódigos G y Compensación de HerramientasClemente CalderonPas encore d'évaluation
- Estructura de Ficheros en WinunisoftDocument66 pagesEstructura de Ficheros en Winunisoftwilliam valeraPas encore d'évaluation
- Practica - 1 - IIIP - Compensación de Herramientas en Radio y AlturaDocument12 pagesPractica - 1 - IIIP - Compensación de Herramientas en Radio y AlturaAlex Moreano APas encore d'évaluation
- III ProgramaciónDocument34 pagesIII Programaciónstaticfactory9281Pas encore d'évaluation
- G01 Interpolacion LinealDocument24 pagesG01 Interpolacion Linealhiram54Pas encore d'évaluation
- Compensaciones de La Herramienta en Longitud y DiametroDocument2 pagesCompensaciones de La Herramienta en Longitud y DiametroMemo JaramilloPas encore d'évaluation
- Instrucción G00Document78 pagesInstrucción G0013239563Pas encore d'évaluation
- Fio4programacion de CNCDocument31 pagesFio4programacion de CNCKenny Medina TerronesPas encore d'évaluation
- Clases Basico de Torno CNCDocument132 pagesClases Basico de Torno CNCedwin_triana_9100% (2)
- Winunisoft FresadoraDocument2 pagesWinunisoft FresadoraCarlos TabletPas encore d'évaluation
- Informe Compensacion de HerramientasDocument8 pagesInforme Compensacion de HerramientasSebastian ZuritaPas encore d'évaluation
- Tabla DescriptivaDocument7 pagesTabla DescriptivaYareniPas encore d'évaluation
- Programacion CNCDocument84 pagesProgramacion CNCOsvaldo FigueroaPas encore d'évaluation
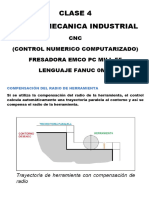
- CLASE 4 CNCDocument5 pagesCLASE 4 CNCCamiloCienfuegosPas encore d'évaluation
- Curso Torno-Cnc DynaDocument19 pagesCurso Torno-Cnc DynaJorge Sarmiento100% (1)
- Manual Fresadora CNCDocument19 pagesManual Fresadora CNCARIELREPas encore d'évaluation
- Practica 4 Charco LeónDocument23 pagesPractica 4 Charco LeónKevin LeonPas encore d'évaluation
- Codigos G y MDocument7 pagesCodigos G y MEma Rangel EstradaPas encore d'évaluation
- Modulo de ProgramacionDocument78 pagesModulo de ProgramacionRaul Ramirez ResendizPas encore d'évaluation
- Programación ManualDocument25 pagesProgramación ManualSaul Serrano CahuantziPas encore d'évaluation
- Maquinas CNCDocument37 pagesMaquinas CNCDanilo PillajoPas encore d'évaluation
- Codigos para El Torno CNC DYNAMITEDocument6 pagesCodigos para El Torno CNC DYNAMITEKevin Islas100% (1)
- Resumen Gonzalez PorrasDocument16 pagesResumen Gonzalez PorrasLuis Gonzalez PorrasPas encore d'évaluation
- Apuntes Fresadora AlumnosDocument62 pagesApuntes Fresadora AlumnosEdu CcPas encore d'évaluation
- Informe de InterpolacionDocument32 pagesInforme de InterpolacionJaviercito VelascoPas encore d'évaluation
- Tutor Ial de CodigosDocument22 pagesTutor Ial de CodigosJuan Carlos Loza RodriguezPas encore d'évaluation
- Curso de CNCDocument45 pagesCurso de CNCNicolás Maquiavelo100% (2)
- Tarea 2 Grupa 16Document13 pagesTarea 2 Grupa 16Miguel JiménezPas encore d'évaluation
- MecanizadoDocument15 pagesMecanizadogabrielPas encore d'évaluation
- Funciones Codigo GDocument41 pagesFunciones Codigo GIngGerson MecatronicoPas encore d'évaluation
- Manual CNCDocument24 pagesManual CNCFrancisco Jara RissettiPas encore d'évaluation
- Previo Fresa CNCDocument6 pagesPrevio Fresa CNCGael Garcia CarranzaPas encore d'évaluation
- Comandos G y M para La Programacion CNCDocument9 pagesComandos G y M para La Programacion CNCAlexander IllanesPas encore d'évaluation
- Compensación de Herramientas de Corte en Altura G43 y G44Document2 pagesCompensación de Herramientas de Corte en Altura G43 y G44María Clemencia Toca Gallo33% (3)
- Control Numerico 2Document29 pagesControl Numerico 2Julio Chiang PujolPas encore d'évaluation
- Manual Torno HNC 21TDocument46 pagesManual Torno HNC 21Tivan100% (1)
- Cuestionario MecanicaDocument5 pagesCuestionario MecanicaFernando Pasten FernandezPas encore d'évaluation
- Guía 1 Materia Programación CNCDocument33 pagesGuía 1 Materia Programación CNCEmmanuel FuentesPas encore d'évaluation
- Códigos para CNCDocument9 pagesCódigos para CNCRICKYBLACKPas encore d'évaluation
- Practica n4 2Document47 pagesPractica n4 2Edwin Alejandro Caizalitín QuinaluisaPas encore d'évaluation
- Codigos o N g0 g1 g2 g3Document39 pagesCodigos o N g0 g1 g2 g3Marco Ortiz PurizacaPas encore d'évaluation
- Informe de Codigos de Maquinas CNCDocument6 pagesInforme de Codigos de Maquinas CNCWilzon ChambiPas encore d'évaluation
- Introducción Al CNCDocument28 pagesIntroducción Al CNCmecaboscoPas encore d'évaluation
- Funciones PreparatoriasDocument15 pagesFunciones PreparatoriasDenis CruxPas encore d'évaluation
- Programacion Manual o Estructurada Centro de Mecanizado CNCDocument20 pagesProgramacion Manual o Estructurada Centro de Mecanizado CNCFidel PanjojPas encore d'évaluation
- Manufactura Avanzada U3Document19 pagesManufactura Avanzada U3Diego AvalosPas encore d'évaluation
- Código G y M ISODocument11 pagesCódigo G y M ISOkevin MontaluiaPas encore d'évaluation
- Ape 3Document10 pagesApe 3Brayan ChagllaPas encore d'évaluation
- G00 en Este Codigo No Se Requiere ProgramacionDocument6 pagesG00 en Este Codigo No Se Requiere ProgramacionalexauberPas encore d'évaluation
- Curso de Torno A CNC OnlineDocument30 pagesCurso de Torno A CNC Onlineapi-371146667% (3)
- Codificacion IsoDocument17 pagesCodificacion IsoAnthony RamonPas encore d'évaluation
- Ciclos de Palpacion Siemens 840DDocument48 pagesCiclos de Palpacion Siemens 840DantonioPas encore d'évaluation
- Códigos para CNC Guia para EstudioDocument6 pagesCódigos para CNC Guia para EstudiogabyclkPas encore d'évaluation
- Proceso Introduccion Procesos CNCDocument4 pagesProceso Introduccion Procesos CNCDavall17Pas encore d'évaluation
- Capitulo 4Document82 pagesCapitulo 4Enrique Buenaonda50% (4)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109D'EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Pas encore d'évaluation
- Proceso de mecanización por arranque de viruta. FMEH0109D'EverandProceso de mecanización por arranque de viruta. FMEH0109Évaluation : 5 sur 5 étoiles5/5 (1)
- Interpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308D'EverandInterpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308Pas encore d'évaluation
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaD'EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaPas encore d'évaluation
- PtranspDocument4 pagesPtranspMarcos Corrales0% (1)
- Sensores y Actuadoresnomenclatura - MetrologiaDocument35 pagesSensores y Actuadoresnomenclatura - MetrologiaMaanvimePas encore d'évaluation
- A12445 - 03 - Plantea PL - 18 - 24 - 4Document7 pagesA12445 - 03 - Plantea PL - 18 - 24 - 4Bryancr CoronelPas encore d'évaluation
- ReprEstado 03-04Document6 pagesReprEstado 03-04MaanvimePas encore d'évaluation
- Espacio EstadosDocument40 pagesEspacio EstadosMaanvimePas encore d'évaluation
- Marketing Internacional DiapocitivasDocument23 pagesMarketing Internacional DiapocitivasMaanvimePas encore d'évaluation
- Codigos de Ciclos Fijos - EstudiantesDocument16 pagesCodigos de Ciclos Fijos - EstudiantesMaanvimePas encore d'évaluation
- Codigos de Ciclos Fijos - Fresadora Prolight - EstudiantesDocument12 pagesCodigos de Ciclos Fijos - Fresadora Prolight - EstudiantesMaanvimePas encore d'évaluation
- CAM 1 EstudiantesDocument22 pagesCAM 1 EstudiantesMaanvimePas encore d'évaluation
- Errores SemanticosDocument3 pagesErrores SemanticosCeleste Acosta Gonzales33% (3)
- Se Dice Que Un Teléfono Inteligente Es Una Computadora de ManoDocument2 pagesSe Dice Que Un Teléfono Inteligente Es Una Computadora de ManoSimón Billeke80% (10)
- MipsDocument3 pagesMipsMARTIN JOSE PARED BAEZPas encore d'évaluation
- Practica2 PREDA 17 18Document8 pagesPractica2 PREDA 17 18ChusVegaPiconPas encore d'évaluation
- TI, Vol 2 El Software y DBMS - Fernando J. MartiniDocument54 pagesTI, Vol 2 El Software y DBMS - Fernando J. MartiniStay100% (1)
- Unidad 2 - Relaciones Entre Tablas de MYSQL PDFDocument20 pagesUnidad 2 - Relaciones Entre Tablas de MYSQL PDFFernando Neptaly Sevilla RodriguezPas encore d'évaluation
- Diagrama de Flujo de InspeccionesDocument1 pageDiagrama de Flujo de InspeccionesMarco Castro100% (1)
- 4.2.2.13 Lab - Configuring and Verifying Extended ACLsDocument9 pages4.2.2.13 Lab - Configuring and Verifying Extended ACLsStevenPas encore d'évaluation
- C4 Abrazo Mortal SSOODocument14 pagesC4 Abrazo Mortal SSOOUlquiorraPas encore d'évaluation
- Practica Redes IDocument2 pagesPractica Redes IAny HunterPas encore d'évaluation
- Programacion ConsultaDocument19 pagesProgramacion ConsultapedroPas encore d'évaluation
- Como Usar DriveviewDocument35 pagesComo Usar DriveviewDaniel RivasPas encore d'évaluation
- Informe Cliente/ServidorDocument8 pagesInforme Cliente/ServidornatykhueraPas encore d'évaluation
- Manual Recuperar Contraseña de La Plataforma EducarecuadorDocument6 pagesManual Recuperar Contraseña de La Plataforma Educarecuadorrobertotenezaca100% (1)
- Ficha TécnicaDocument1 pageFicha TécnicaMaritzaRosadoPas encore d'évaluation
- Pliego Sustitución FirewallDocument32 pagesPliego Sustitución FirewallJose RojasPas encore d'évaluation
- Curso Hacking EticoDocument5 pagesCurso Hacking EticoUnd3rC0d3Pas encore d'évaluation
- Caso 4 Diagrama de GanttDocument5 pagesCaso 4 Diagrama de Ganttlucario93Pas encore d'évaluation
- Reconocimiento de Imágenes Utilizando Redes Neuronales ArtificialesDocument72 pagesReconocimiento de Imágenes Utilizando Redes Neuronales ArtificialesProgramando JavaPas encore d'évaluation
- Guía Del Módulo de Administración de SQL Server para System Center Operations ManagerDocument115 pagesGuía Del Módulo de Administración de SQL Server para System Center Operations ManagerRaul Eduardo GonzalezPas encore d'évaluation
- Actividad de ComandoDocument7 pagesActividad de Comandosmith_o0Pas encore d'évaluation
- Jigsaw PlanetDocument5 pagesJigsaw PlanetRaúl Diego0% (1)
- Ejemplo de Simulación Con TwinCatDocument8 pagesEjemplo de Simulación Con TwinCatcluisyPas encore d'évaluation
- Ordenar Arreglo Por Método Burbuja en Pseudocódigo - WikiDocument4 pagesOrdenar Arreglo Por Método Burbuja en Pseudocódigo - WikizaprythaePas encore d'évaluation
- Guia de Estudio de Windows 1añoDocument5 pagesGuia de Estudio de Windows 1añowilman caro payaresPas encore d'évaluation
- DigitaDocument16 pagesDigitaAnonymous TnmRw4OAmXPas encore d'évaluation
- Analogia Del RestauranteDocument5 pagesAnalogia Del RestauranteCristhian Santos100% (3)
- 3 ClassificationDocument90 pages3 ClassificationJaviera Elisa Arancibia CádizPas encore d'évaluation
- Desarrollo PHP para Todos - Creacion de Graficos en Documentos PDF Con FPDF y JGRAPHDocument10 pagesDesarrollo PHP para Todos - Creacion de Graficos en Documentos PDF Con FPDF y JGRAPHOscar Enrique Montes AntequeraPas encore d'évaluation
- Transacciónes AtómicasDocument38 pagesTransacciónes AtómicasRicardo Hernández AlvaradoPas encore d'évaluation