Académique Documents
Professionnel Documents
Culture Documents
Cinemática, Dinâmica e Equilibrio de Motores
Transféré par
Anonymous MqPr4iTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cinemática, Dinâmica e Equilibrio de Motores
Transféré par
Anonymous MqPr4iDroits d'auteur :
Formats disponibles
Filiada :
1
Cinemtica, dinmica e equilbrio
de motores
Contedo:
- Cinemtica do mecanismo biela manivela. Conceitos fundamentais e designaes
- As relaes cinemticas no mecanismo da biela e manivela central
- As relaes cinemticas no mecanismo da biela e manivela descentralizado
- Dinmica do mecanismo biela manivela
- Reduo de massa
- Foras que atuam sobre o mecanismo biela manivela
- Ordem de funcionamento do motor
- Equilibrado de motor de um cilindro
- Equilibrado de motores em lnea
- Equilibrado de motores em V
- Uniformidade de giro do motor
- Clculo dinmico de um motor de combusto
Filiada :
2
Cinemtica, dinmica e equilbrio
de motores
Cinemtica do mecanismo biela manivela. Conceitos fundamentais e designaes.
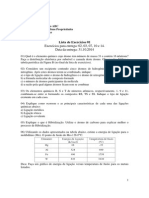
Figura 153. Mecanismo biela manivela do motor alternativo
O mecanismo biela manivela do motor alternativo (Fig. 153,a), constitudo pela manivela 1, a biela 2 e
o pisto 3, serve para transformar o movimento alternativo do pisto em movimento de rotao da
manivela.
A manivela um dos cotovelos do virabrequim do motor e est formada pelos mancais de apoio 4, que
giram nas bronzinas, e pelo mancal de biela 5, unido rigidamente aos mancais de apoios pelos dois
braos 6 da manivela.
Existem estruturas de motores nos quais entre dois mancais de apoio se encontram duas manivelas. Na
prolongao dos braos esto os contrapesos 7. A biela est articulada por sua cabea com o mancal de
biela da manivela e por seu p com o passador do pisto.
De acordo com os diferentes esquemas estruturais se distinguem os seguintes tipos de mecanismos
biela manivela:
1. Central ou axial (Fig. 153,a), no qual o eixo do cilindro corta o eixo do virabrequim.
2. Descentrado (Fig. 153,b), no qual o eixo do cilindro nao corta o eixo do virabrequim. O eixo do
cilindro do motor com mecanismo de biela manivela descentrado est deslocados com relao ao
eixo do virabrequim, na direo da rotao, uma magnitude e (descentrado). O valor de este
deslocamento no supera o 10% do deslocamento do pisto.
3. Mecanismos viela manivela em V
A velocidade angular do virabrequim se define como a primeira derivada do deslocamento angular com
relao ao tempo. Para velocidades constantes, pode-se expressar em funo das rpm (n):
= =
s
rad
n
n
dt
d
1047 , 0
60
2
O deslocamento angular da manivela quando =const., se determina por:
Filiada :
3
Cinemtica, dinmica e equilbrio
de motores
[ ] rad t =
ou:
[ ]
o
nt t
n
t 6
30
180 180
= = =
A velocidade circular do eixo do mancal de biela :
R v
a
=
Ao girar a manivela se produz uma acelerao centrpeta, de magnitude constante e em direo ao centro
seguindo o radio da manivela:
R
a
2
=
Cinemticas no mecanismo da biela e manivela central.
Deslocamento do pisto de um mbm central
CursoSAEBrasil
Quando o virabrequim gira um ngulo , o pisto se desloca do PMS a magnitude:
Se = B
o
B = B
o
O - (OC + CB), (1)
Filiada :
4
Cinemtica, dinmica e equilbrio
de motores
onde:
B
o
O = L + R, (2)
OC = OA cos = R cos, (3)
CB = AB cos = L cos. (4)
Se tem que:
Se = L + R (R cos + L cos). (5)
Tirando R do parntesis obteremos que:
+ + = cos cos 1
R
L
R
L
R Se , (6)
considerando que
L
R
= , (7)
e substituindo (7) em (6) se tem:
+ + =
cos
1
cos
1
1 R Se . (8)
Para simplificar a equao obtida, podemos expressar cos em funo do ngulo . Pelos
tringulos ACB e ACO se tem que:
CA = R sen = L sen, (9)
de onde:
sen = sen.. (10)
De trigonometria se sabe que:
sen
2
+ cos
2
= 1, (11)
pelo que:
2
sen 1 cos = . (12)
Substituindo (10) em (12):
2 2
sen 1 cos = . (13)
Substituindo (13) em (8):
Filiada :
5
Cinemtica, dinmica e equilbrio
de motores
+ + =
2 2
sen 1
1
cos
1
1 R Se . (14)
A equao (14) a dependncia exata do deslocamento do pisto com o ngulo de giro do
virabrequim. A dupla derivada desta expresso, necessria para calcular a acelerao do pisto, resulta
muito grande e incomoda para sua utilizao. Por esse motivo se simplifica a equao substituindo-a por
uma expresso aproximada, porem, o suficientemente exata. Para isso a expresso
( )
2
1
2 2 2 2
sen 1 sen 1 = , (15)
que est na equao (14), se desenvolve em serie com o binmio de Newton.
Para casos gerais a serie binomial tem a forma:
( )
( ) ( )( )
......
3 2 1
2 1
2 1
1
3 3 2 2 1
+
+ =
b a
n n n
b a
n n
b na a b a
n n n n n
(14)
Neste caso: a =1, b =
2
sen
2
e n =, pelo que:
( )
( )
4 4 2 2
2
1
2 2
sen
2 1
1
2
1
2
1
sen
2
1
1 sen 1
+ = (15)
de onde:
( ) ( )
8
1
0.125
2
25 . 0
2
2
1
2
1
2 1
1
2
1
2
1
= = =
.
Observa-se que nas condies mais desvantajosas, = 1/3 e =90
o
, o terceiro termo desta serie
ser: 1/8(1/3)
4
=0,00154 e o segundo 1/2(1/3)
2
=0,055555. Ento, o segundo termo representa um 5% do
primeiro e o terceiro um 0.154 %.
Pelo tanto, com suficiente aproximao, se podem tomar os dois primeiros termos s:
( )
2 2
2
1
2 2
sen
2
1
1 sen 1 = (16)
Substituindo a eq. (16) em (14):
+ + =
2 2
sen
2
1
1
1
cos
1
1 R Se . (17)
muito til simplificar ainda mais a expresso de Se. Para isso podemos deixar ela em funo s
de cos:
Filiada :
6
Cinemtica, dinmica e equilbrio
de motores
Lembrando de trigonometria que o sen quadrado da metade de qualquer ngulo :
2
cos 1
2
sen
2
= , (18)
ento, para todo o ngulo, o sen quadrado do ngulo completo teria a mesma forma porem o cos seria para
o dobro de dito ngulo:
2
2 cos 1
sen
2
= , (19)
pelo tanto, substituindo (19) em (17):
+ + =
2
2 cos 1
2
1
1
1
cos
1
1
2
R Se (20)
+ + =
2
2 cos
2
1
2
1
1
1
cos
1
1
2
R Se (21)
+ + + =
4
2 cos
4
1
1
1
cos
1
1
2 2
R Se (22)
+ + + =
2 cos
4
1
4
1 1
cos
1
1 R Se (23)
+ + =
2 cos
4
1
4
1 1
cos
1
1 R Se (24)
+ + =
2 cos
4
cos
4
1 R Se (25)
Que pode ser representada da forma seguinte:
2 cos
4
cos
4
1 R R R Se
+ = .
A Figura a seguir se do as curvas de deslocamento do pisto e seus componentes, assim como o
deslocamento do pisto que corresponde a cada grau de giro do virabrequim para diferentes valores de :
Filiada :
7
Cinemtica, dinmica e equilbrio
de motores
Comprovemos se a equao aproximada (25) vlida:
Quando = 0
o
, cos 0
o
=1, pelo tanto 0
4
1
4
1 =
+ =
R Se .
Quando = 90
o
, cos 90
o
=0 e cos 180 =0, pelo tanto
+ =
2
1
R Se .
Quando = 180
o
, cos 180
o
=-1 e cos 360 =1, pelo tanto
R R R Se 2
1
1
1
1
4
1
4
1 =
+ + =
+ + =
.
Por conseguinte, quando girar o virabrequim os primeiros 90
o
, o deslocamento do pisto desde seu
PMS consideravelmente maior que quando gira os seguintes 90
o
( = 180
o
). Isto se explica porque o
pisto se movimenta influenciado por duas causas:
o deslocamento da biela ao largo do eixo do cilindro
o desvio do eixo da biela do eixo do cilindro.
Velocidade do pisto
Com exatido suficiente para os clculos, a equao da velocidade do pisto v
e
, se obtm,
derivando com relao ao tempo a equao (25):
2 cos
4
cos
4
R R R R Se + =
Filiada :
8
Cinemtica, dinmica e equilbrio
de motores
= = =
d
d
R
d
R
d
d
d
R
d
dR
d
dSe
dt
d
dt
dSe
v
e
2 cos
4
2 cos
4
cos
cos
+ =
= = =
2 2
4
2 cos
4
cos
sen R Rsen
d
d
R
d
d
R
d
dSe
dt
d
dt
dSe
v
e
+ =
2
2
sen sen R v
e
. (26)
2
2
sen R sen R v
e
+ =
Na figura a seguir se apresentam as curvas da velocidade do pisto e seus componentes. A
velocidade do pisto se considera positiva quando o pisto desce.
Da equao (26) se deduz que quando =0
o
(PMS) e =180
o
(PMI) v
e
=0. Lgico, estes valores
de ngulos correspondem aos PMS e PMI respectivamente, onde o pisto se detm. J para =90
o
, v
e
=
R. Esta seria a velocidade mxima do pisto?. A resposta NO. Para determina o ngulo
correspondente velocidade mxima do pisto, se deriva a equao (26) com relao a e se iguala a
zero:
( ) 0 2 cos cos
max max
2
= + =
e e
v v
e
R
d
dv
(27)
Dos clculos se deduze que:
Filiada :
9
Cinemtica, dinmica e equilbrio
de motores
quando 33 , 0
3
1
= = ,
o
v
e
5 , 73
max
=
e
R v
e
05 , 1
max
quando 25 , 0
4
1
= = ,
o
v
e
75
max
=
e
R v
e
03 , 1
max
quando 0
1
=
= ,
o
v
e
90
max
=
e
R v
e
max
A velocidade media do pisto, que um parmetro de classificao, um dos fundamentos da
teoria da semelhana dos motores. Este parmetro se utiliza com freqncia para apreciar a qualidade do
motor.
Durante 1 minuto o virabrequim do motor da n voltas e o pisto recorre um caminho igual a 2Sn,
por tanto:
.
2
30 60
2
R
Sn Sn
v
med
e
= = =
Para os motores de automvel [ ] s m v
med
e
/ 16 10 = . Nos motores dos automveis de carreira a velocidade
media do pisto alcana 22-36 m/s a 6000 - 14000 rpm.
Acelerao do pisto
Com exatido suficiente para os clculos, a equao da acelerao do pisto se pode obter
derivando a equao (26) com respeito ao tempo t:
( )
2 cos cos
2
+ = = = R
d
dv
dt
d
dt
dv
e e
e
. (28)
Na Figura a seguir se representa a curva da acelerao do pisto e seus componentes (primeira e
segunda harmnica) em funo do ngulo de giro do virabrequim.
Filiada :
10
Cinemtica, dinmica e equilbrio
de motores
A acelerao do pisto positiva se seu vetor esta dirigido para o eixo do virabrequim. No PMS a
acelerao sempre positiva e no PMS negativa independentemente da direo em que se mova o
pisto. No instante em que a biela e a manivela formam um ngulo reto a acelerao do pisto nula.
Os valores extremos da acelerao do pisto se podem encontrar pela equao (28), igualando a
zero a sua derivada:
( ) ( ) . 0 cos 4 1 2 2 = + = + =
sen sen sen
dt
d
e
Dos clculos se deduz que quando:
=0
o
( ) + = 1
2
max
R
e
;
quando =180
o
( ) = 1
2
. min
R
e
;
e quando
4
1
cos = .
8
1
2
+ =
R
e
Nos motores de ciclo Otto de automvel a acelerao do pisto chega a 22.000 m/s
2
, e nos motores
dos automveis de competio, at 36.000-93.000 m/s
2
a 6.000-14.000 rpm.
Para acelerar os clculos dos parmetros cinemticos do mecanismo de biela e manivela central, os
valores das magnitudes
( )
cos
;
2
+ sen
e
R R
S
e e
, de acordo com o ngulo de giro do virabrequim para
diferentes valores de , se determinam por umas tabelas especiais.
Filiada :
11
Cinemtica, dinmica e equilbrio
de motores
Cinemticas no mecanismo da biela e manivela descentralizado
Introduzindo o descentralizado se consegue:
1) Diminuir a presso do pisto sobre a parede do cilindro durante o percurso de trabalho e aumentar a
dita presso durante o percurso de compresso, o que contribui para que o desgaste do motor seja mais
uniforme;
2) Um pequeno aumento do percurso do pisto, que permite aumentar a cilindrada do motor e por
conseguinte, sua potencia;
3) Diminuir a velocidade do pisto nas proximidades do PMS, com o que melhora o processo da
combusto a volume constante;
4) Aumenta a distancia entre o virabrequim e o comando de vlvula, o que aumenta tambm o espao
necessrio para que a cabea da biela possa girar sem dificuldade;
5) Melhorar a distribuio dos gases e diminuir as deformaes do carter do motor (este ultimo problema
no esta todavia suficiente estudado).
A medida que aumenta o nmero de revolues do motor perdem importncia algumas das
vantagens indicadas, j que o trabalho de atrito depende consideravelmente do valor das foras de inrcia,
na qual no influencia o descentrado.
Os motores com mecanismo de biela e manivela na qual o passador do pisto esta deslocado com relao
ao eixo deste (estando os eixos do cilindro e do virabrequim situados em um mesmo plano) oferecem as
mesmas vantagens que os motores em que este mecanismo esta descentrado. A descentralizao deles
da ordem de 0,01 0,03 de seu dimetro.
Quando o valor desta descentralizao muito pequeno, o clculo cinemtico do mecanismo biela
manivela descentralizado se pode fazer pelas mesmas formulas que o do mecanismo central.
Na continuao se utilizar as seguintes designaes: , ngulo de rotao da manivela, a partir da
direo do eixo do cilindro no sentido horrio de rotao do virabrequim; , velocidade angular do
virabrequim, que se adota constante, = d/dt; , ngulo que forma o eixo da biela, no plano de seu
movimento, com o eixo do cilindro; S, percurso do pisto, S=2R [onde R o raio da manivela; L, a
comprimento da biela, L=R/ (onde um parmetro adimensional)]; e, deslocamento do plano do
movimento do eixo do passador com relao ao eixo do virabrequim, e=kR (onde k o descentralizado
relativo).
Filiada :
12
Cinemtica, dinmica e equilbrio
de motores
Fig. 216. Esquema dos mecanismos biela-manivela: a central; b descentralizado.
Os mecanismos biela-manivela se caracterizam por dois parmetros adimensionais: a relao entre
o raio da manivela e o comprimento da biela
30 , 0 ... 25 , 0 = =
L
R
e o descentralizado relativo
15 , 0 ... 0 = =
R
e
k .
O clculo cinemtico do mecanismo biela-manivela se realiza fundamentalmente para determinar
o deslocamento, a velocidade e a acelerao do pisto.
O deslocamento do pisto S, desde seu ponto de partida A no PMS para o caso geral de um
mecanismo descentralizado (Fig. 216, b)
( ) . cos cos cos ' '
1
R L R L DE AD E A A A S + = = = (258)
A obliqidade da biela pode encontrar-se na equao
e Lsen Rsen CB + = = ,
ou
( ) ( ) k sen L e sen sen = = / , (259)
e
( ) . 1 cos
2 2
k sen =
Filiada :
13
Cinemtica, dinmica e equilbrio
de motores
Tomando em considerao os pequenos valores dos parmetros e k, a expresso (259)
conveniente desenvolver-la em uma srie segundo expoentes do pequeno parmetro
2
e limitar-se aos
termos de ordem
2
e k
2
:
( ) ( ) ( ) . 2 cos 1
4
1
2
1 ...
8 2
1 cos
2
2
2 2
2
4
4
2
2
sen k sen k sen k sen k sen + = + + =
.(260)
Substituindo a equao (258) a expresso aproximada obtida (260) encontramos:
( ) ( ) . 2 cos 1
4
cos cos
1
+ =
sen k R S (261)
O ngulo
1
correspondente a posio do pisto no PMS se far a partir do triangulo AEO:
k
k
R L
e
sen
+
=
+
=
1
1
.
Analogamente se determina o ngulo
2
para o PMI. no triangulo AEO:
.
1
2
k
k
R L
e
sen
=
Com uma preciso salvo as magnitudes de segunda ordem includas
2
e k
, 3 , 57
1
o
k =
o o
k 3 , 57 180
2
+ =
e . 1 cos cos
2 1
= =
A carreira do pisto
( ) ( ) . 2
2
1 2 cos cos
2 2
2 1
R
k
R R L R L S
+ + + =
O deslocamento do pisto pode representar-se como a soma de dois componentes harmnicos
dos deslocamentos de primeira e segunda ordem: S=S
I
+S
II
.
Com a preciso anteriormente desenvolvida, o primeiro harmnico :
( ) ( ) [ ], cos 1 cos 1 = = R sen k R S
I
onde
o
k 3 , 57 = .
O segundo harmnico
( ). 2 cos
4
= R S
II
A magnitude do deslocamento do primeiro harmnico pequena e praticamente se pode
depreciar.
A velocidade do pisto igual derivada com relao ao tempo das expresses (258) e (261):
( )
, cos 2
2 cos
1 II
k sen sen R
sen R
dt
d
dt
ds
+ =
+
+
= = (262)
onde
Filiada :
14
Cinemtica, dinmica e equilbrio
de motores
( ) ( )
. 2
2
; cos
sen R
sen R k sen R
II
I
=
= =
A velocidade do pisto se faz igual a zero nos pontos mortos, quer dizer, quando =
1
e =
2.
Sendo
igual a 90e 270
o
, a biela realiza um movimento de deslocamento e a velocidade do pisto igual
a velocidade circular do eixo do mancal de biela do virabrequim ( = u =R). Esta velocidade seria a
mxima velocidade do pisto para = 0. O segundo harmnico
II
que tem em conta a distancia finita da
biela desloca a mxima velocidade
max.
na direo do PMS. Com a preciso adotada, a velocidade
( ) 2 / 1
2
max
+ = = R para
o o
3 , 57 90 = e
o o
3 , 57 270 + = .
A velocidade media do pisto durante seu movimento entre os pontos mortos
30 /
.
Sn
p m
= .
Derivando com respeito ao tempo a expresso (262) da velocidade do pisto, obteremos a
acelerao
( )
+
+
= = =
2
2
2
cos
cos
cos
cos
`
R
dt
d
d
d
dt
d
a
( )
II I
a a sen k R + = + + 2 cos cos
2
onde
( ) ( ) = + = cos cos
2 2
R sen k R a
I
;
. 2 cos
2
R a
II
=
A acelerao mxima segundo seu valor absoluto ( )
2
. max
1 R a + = se alcana quando . k = A
acelerao tende a zero naqueles pontos, nos quais a velocidade do pisto tem seu mximo valor. Para >
0,25, perto do PMI quando ( ) 4 / 1 cos 180 ar
o
= aparecem dois extremos adicionais da acelerao.
Filiada :
15
Cinemtica, dinmica e equilbrio
de motores
Fig. 217. Construo das curvas com uma preciso salvo as magnitudes de segunda ordem: a- deslocamento do
pisto; b- velocidade do pisto; c- acelerao do pisto
As funes de deslocamento, velocidade e acelerao do pisto com respeito ao ngulo de giro da
manivela mais cmodo constru-las somando os harmnicos respectivos. Esta construo se ilustra na
Fig. 217 para um mecanismo cujo valor de k=0 e com uma magnitude de mais elevada ( =0,4) para
maior claridade.
A influencia do descentralizado relativo k 0, com a preciso adotada, se refere somente ao
deslocamento dos primeiros harmnicos S
I
,
I
e a
I
em um pequeno ngulo ( )
o
k 3 , 57 = .
A cinemtica da biela se determina por seu ngulo de rotao , que integra a expresso (259).
Diferenciando esta equao em relao ao tempo, obteremos a relao
dt
d
dt
d
cos cos = ,
da qual se obtm a velocidade angular da biela
Filiada :
16
Cinemtica, dinmica e equilbrio
de motores
( )
= = cos
cos
cos
dt
d
b
.
A acelerao angular da biela ser
( ).
cos
cos
cos
2
3
2
2
= = sen
sen sen
dt
d
b
b
Filiada :
17
Cinemtica, dinmica e equilbrio
de motores
Dinmica do mecanismo biela manivela
FORAS QUE ATUAM NO MECANISMO BIELA-MANIVELA CENTRALIZADO E
DESCENTRALIZADO
A anlise das foras que atuam no mecanismo biela-manivela indispensvel para calcular a
resistncia mecnica das peas do motor e para determinar as cargas sobre as bronzinas. Esta anlise se
efetua para um determinado regime de funcionamento do motor. Em concordncia com o mtodo
cintico-esttico, ao calcular o mecanismo biela manivela do motor se consideram as cargas provenientes
das foras de presso dos gases no cilindro e as foras de inrcia das massas em movimento, mesmo que
as foras de frico se depreciam. O carter do motor se considera imvel e se adota que o virabrequim
gira com velocidade angular constante. Ademais, as foras de inrcia das massas em movimento do
mecanismo biela manivela se dividem em foras de inrcia das massas com movimento alternativo (sub-
ndice i) e foras de inrcia com movimento giratrio (sub-ndice R).
A presso dos gases sobre o pisto p
g
=f(S) e, respectivamente, a fora de presso dos gases P
g
=
p
g
F
p
(onde F
p
a rea do pisto) se determinam do diagrama indicado, a qual se constri a partir dos
resultados do clculo trmico (que geralmente se faz para a potencia nominal e a velocidade de rotao
respectiva). Para reconstruir graficamente este diagrama, obtendo o desenvolvimento em funo do
ngulo de rotao do virabrequim p
g
=f(), aplicando a equao (258) se calcula o deslocamento do
pisto S e se traam no diagrama desde o PMS (Fig. 218, a e b) os valores correspondentes a cada ngulo
determinado (praticamente cada 15 ou 30
o
) de rotao do virabrequim.
Filiada :
18
Cinemtica, dinmica e equilbrio
de motores
Fig. 218. Construo das curvas das foras que atuam no mecanismo biela manivela em funo do giro do
virabrequim: a- fora de presso dos gases P
g
e a soma das forcas P
g
+ P
i
, que atuam sobre o p da biela;
b- fora de inrcia P
i
; c- fora lateral N; d- fora normal Z; e- fora tangencial T.
A presso dos gases no cilindro do motor (Fig. 219) origina a fora P
g
, aplicada no cabeote. Esta fora
atua no comprimento do eixo do cilindro, sua magnitude e igual, mas esta em sentido contrario fora P
g
que atua sobre o pisto.
Filiada :
19
Cinemtica, dinmica e equilbrio
de motores
Fig. 219. Foras P
g
e P
i
que atuam no mecanismo biela manivela.
Para determinar as foras de inrcia e necessrio conhecer as massas das peas do mecanismo
biela manivela. Com a finalidade de simplificar os clculos, o mecanismo real biela manivela
substitudo por um sistema dinmico equivalente de massas concentradas. Todas as peas moveis se
subdividem em grupos de acordo com o carter de seu movimento:
1. Peas que efetuam um movimento alternativo ao longo do eixo do cilindro (grupo pisto). A
massa do pisto com os anis e o passador se considera concentrada no eixo deste ltimo e se
designa por m
p.
2. Partes giratrias do virabrequim. As massas destas peas se substituem por uma massa que esta
reduzida ao raio R da manivela e se designa por m
R
. A reduo se efetua mantendo as
condies de igualdade entre as foras centrifugas de inrcia das massas reais e a massa
reduzida.
A massa do mancal de biela m
m.b
com as partes adjacentes dos braos (Fig. 220, a ) se adota
concentrada no meio do eixo do mancal e visto que seu centro de gravidade est a um distancia
R do eixo do virabrequim, no se requer a reduo desta massa.
A massa da parte central do brao m
br
seguindo o contorno abcd, cujo centro de gravidade se
encontra a um raio se reduz ao raio R. Da condio de igualdade das foras centrifugas
m
br
2
= m
brR
R
2
temos
Filiada :
20
Cinemtica, dinmica e equilbrio
de motores
R
m m
br brR
= .
A massa reduzida de toda a manivela
. 2 2
. .
R
m m m m m
br b m brR b m M
+ = + =
3. Peas que realizam um movimento complexo plano paralelo (grupo de peas da biela). A biela
e substituda aproximadamente por um sistema de duas massas estaticamente equivalentes a
massa m
b.p,
concentrada no eixo do passador e a massa m
b.r
,
concentrada no eixo do mancal da
biela do virabrequim. A massa da biela m
b
se divide em duas partes (Fig. 220, b): naquela que
esta referida ao eixo do passador no pisto m
b.p
=m
b
L
r
/L e na massa referida ao eixo do mancal
da biela m
b.r
=m
b
L
p
/L.
Fig. 220 Reduo do mecanismo biela-manivela a um sistema de duas massas.
Para obter um sistema dinmico equivalente devero respeitar-se trs condies, a saber:
1) Constncia da massa total (m
b.p
+m
b.r
=m
b
);
2) Posio invarivel do centro de gravidade das massas (m
b.p
L
p
=m
b.r
L
r
);
3) Momento de inrcia constante com respeito ao centro de massas.
Filiada :
21
Cinemtica, dinmica e equilbrio
de motores
O momento de inrcia do sistema reduzido
p r b r
p
b p
r
b r r b p p b red
L L m L
L
L
m L
L
L
m L m L m I = + = + =
2 2 2
.
2
.
deve ser igual ao momento de inrcia da biela I
b.
Esta condio no se observa para as bielas reais, e I
red
> I
b
.
O valor de
( )
2 2
/ 03 , 0 01 , 0 R m I I I
b b red
= = .
Nos clculos tericos precisos necessrio aplicar ao sistema equivalente um momento
corretor das foras de inrcia
I M
b
= ,
onde
.
2
sen
dt
d
b
=
O momento corretor M esta orientado segundo a acelerao angular da biela (no primeiro
quadrante, seguindo o sentido de rotao da manivela). Tendo em vista que os valores deste
momento so pequenos, geralmente se depreciam e se comprem somente as duas primeiras
condies de equivalncia.
Para a maioria das estruturas existentes de motores de automvel
( )
b p b
m m 3 , 0 ... 2 , 0
.
= e ( )
b r b
m m 7 , 0 ... 8 , 0
.
= .
Assim, todo o mecanismo biela-manivela (Fig. 220, c) se substitui aproximadamente por um
sistema de duas massas concentradas unidas por ligaes rgidas imponderveis: a massa no ponto A, que
tem movimento alternativo:
p b p i
m m m
.
+ = ,
e a massa no ponto B, com movimento rotativo:
r b M R
m m m
.
+ = .
Nos motores em V se juntam duas bielas dos cilindros opostos no mancal do virabrequim, por isso
r b M R
m m m
.
2 + = .
Os valores de m
p
e m
b
so eleitos de acordo aos dados das estruturas existentes.
Filiada :
22
Cinemtica, dinmica e equilbrio
de motores
As massas construtivas m
p
e m
b
, referentes unidade de superfcie do pisto F
p
, se ilustram na
Tabela 25.
25. Massas construtivas das peas do mecanismo biela manivela, em kg/m
2
(g/cm
2
)
Motores Massa do pisto de legao
de alumnio m
p
Massa da biela m
b
Otto (D=60-100mm)
Diesel (D=80-120mm)
100 150 (10 15)
200 300 (20 30)
120 200 (12 20)
250 350 (25 35)
Em conformidade com o sistema adotado, no qual duas massas dinamicamente substituem o
mecanismo biela manivela, as duas foras de inrcia se reduzem a dois: a fora de inrcia P
i
das massas
que tem movimento alternativo e a fora centrifuga de inrcia Z
R
das massas rotativas.
A fora de inrcia das massas com movimento alternativo
( ). 2 cos cos
2
sen k R m a m P
i i i
+ + = =
Esta fora mais cmoda represent-la como a soma das foras de inrcia de primeira e segunda
ordem, que variam de acordo com a lei harmnica:
( ) = cos C P
iI
; 2 cos C P
iII
= ,
onde
2
R m C
i
= ;
o
k 3 , 57 . = .
As curvas de acelerao do pisto ( )
II I
a a f a + = = em sua respectiva escala e com signo
invertido so as curvas das foras de inrcia (veja a fig. 218, b).
A fora de inrcia das massas com movimento alternativo P
i
no sistema de mecanismo biela
manivela se manifesta na forma de uma fora livre de magnitude e signo variveis que atuam ao longo do
eixo do cilindro.
Se o passador do pisto esta descentralizado em uma distancia e respeito ao eixo do cilindro, ento
a fora de inrcia P
i
esta orientada ao longo de uma reta que atravessa at o centro comum das massas m
p
e m
b.p
entre o eixo do cilindro e o eixo do passador. Esse deslocamento praticamente muito pequeno e se
pode desprezar nos clculos dinmicos. Ao mesmo tempo, a fora de presso dos gases (que atua sempre
ao longo do eixo do cilindro) origina um momento eP
g
respeito ao eixo do passador. Por ao deste
momento varia favoravelmente a distribuio da carga sobre a parede do pisto e se elimina a folga
(huelgo) entre o pisto e o cilindro.
Para maior esclarecimento ao determinar a magnitude e a direo das foras de inrcia das massas
com movimento alternativo conveniente utilizar o mtodo dos vetores giratrios.
Filiada :
23
Cinemtica, dinmica e equilbrio
de motores
A fora P
iI
se determina como a projeo sobre o eixo do cilindro do vetor
2
R m C
i
= , que gira
com a velocidade angular do virabrequim.
A fora P
iII
se obtm analogamente, como a projeo sobre o eixo do cilindro do vetor
2
R m C
i
= , que gira com a velocidade angular 2.
A fora centrfuga das massas rotativas do mecanismo biela-manivela
2
R m Z
R R
=
esta sempre dirigida ao longo do raio da manivela, tem um valor constante e est aplicada no centro B do
mancal de biela da manivela. A fora Z
R
pode ser deslocada por uma linha de ao ao centro O do
virabrequim e decomposta em duas foras sobre o eixo de coordenadas:
cos
2
R m Z
R R
x
=
e
sen R m Z
R R
y
2
= .
Examinando mais detalhadamente a ao das foras de presso dos gases sobre o pisto e das
foras de inrcia das massas em movimento. A fora total P que atua sobre o pisto a fora inicial:
i g
P P P + = .
Ao analisar a curva da fora total ( ) f P = (veja a Fig. 218, a), se infere que as foras de inrcia
ao final da carreira de compresso e no comeo da carreira de trabalho, faz diminuir a fora de presso do
gs que atua sobre o pisto.
A fora P, que atua ao longo do eixo do cilindro (Fig. 221) pode se decomposta em dois:
- a fora lateral N, perpendicular ao eixo do cilindro
( ) k sen P Ptg N = , (263)
- a fora K, dirigida ao longo do eixo da biela:
( ) . 2 cos 1
4
1
cos
1
2
+ =
P P K
Filiada :
24
Cinemtica, dinmica e equilbrio
de motores
Fig. 221. Foras e momentos que atuam no mecanismo biela manivela.
As equaes aproximadas, como se mencionou anteriormente, so corretas com uma presso salvo
os termos se segunda ordem includas as magnitudes
2
e. k. (Os erros relativos a essas expresses
constituem mais de 2%). A magnitude k geralmente muito pequena e nos clculos prticos se pode
menosprezar.
Da eq. (263) se deduz que o deslocamento do eixo do cilindro sendo
( ) 0 / > = R e k , diminui um pouco a fora normal N no percurso de expanso.
A fora K pode ser deslocada por sua linha de ao ao centro do mancal da biela na manivela
( ) K K = ' e decomp-la em duas foras: a fora normal Z, cuja direo coincide com o raio da manivela
( )
( )
( )
+
+
= + =
sen k P P K Z 2 cos 1
2
cos
cos
cos
cos ,
e a fora T, cuja direo tangencial circunferncia do raio da manivela
( )
( )
+
+
= + =
cos 2
2 cos
k sen sen P
sen
P Ksen T .
A fora normal Z foi transladada pela linha de ao ao centro do virabrequim e a designamos por
Z(Z = Z). A fora tangencial T tambm pode deslocar-se ao centro do virabrequim (T = T = T), o par
de foras (T, T) com o momento M
t
denominado par motor ou torque.
O par motor
Filiada :
25
Cinemtica, dinmica e equilbrio
de motores
( )
+
+
= =
cos 2
2 cos
k sen sen PR
sen
PR TR M
t
,
se transmite ao volante e transmisso atravs do virabrequim.
As foras Z e T podem somar-se e sua resultante K, igual a fora K, atua ao largo da biela
recarregando os bronzinas de apoio do virabrequim. A fora K pode se decompor-se em duas foras: N,
perpendicular ao eixo do cilindro e P = P
g
+ P
i
, que atua paralelamente ao eixo do cilindro.
As foras N e N, assim como as foras
'
g
P e
' '
g
P (ver a Fig. 219) do lugar a dois pares de foras,
cujas soma de momentos se denomina par de reao ou de volco M
v
, que atua sobre as partes imveis do
mecanismo biela-manivela. O par M
v
esta dirigido em sentido contrrio ao par motor e em
correspondncia com a condio de equilbrio das peas moveis do mecanismo em seu conjunto, igual
soma do par motor e do momento do par agregado ao transportar a fora de inrcia a m P P
i i i
= =
' '
ao
eixo de rotao da manivela. Realmente, como se observa na Fig. 221:
( )
( )
( )
e P M e P
sen
PR e P P
R L Ptg e P Nh M
i i i i
g v
=
+
= +
+ + = + =
cos
cos cos
.
Alm do par de volco, sobre as partes imveis do mecanismo biela manivela atuam a fora de
gravidade, a fora de inrcia
i i
P P =
' '
cujos signo e magnitude so variveis e a fora centrfuga de inrcia
Z
R
. Estas foras se equilibram pelas reaes dos apoios e parcialmente pelas foras internas entre
mecanismos e peas individuais do motor.
As direes de todas as foras e momentos, mostrados na Fig. 221 se adotam como positivos.
Havendo calculado as foras N, Z, e T para uma srie de valores do ngulo , se constroem as
curvas (ver a Fig. 218, c e). A curva das foras tangenciais T (Fig. 218, e), simultaneamente representa a
curva do par motor M
i
de um cilindro em outra escala.
Na continuao se determinam as foras que atuam sobre as bronzinas de biela e de apoio do
virabrequim. A fora resultante R
m.b,
aplicada ao mancal de biela da manivela, se calcula somando a fora
K, que atua ao largo do eixo da biela, com a fora centrfuga
2
.
R m Z
r b R
m
= , que aparece por efeito da
rotao de uma parte da massa da biela. A construo se realiza em forma de um diagrama polar do vetor
da fora R
m.b
, orientado com respeito a manivela do virabrequim, que se assume como imvel. Primeiro se
constri o diagrama polar da fora K, traando seus componentes Z e T, nas coordenadas retangulares com
o centro O (Fig. 222), para diferentes ngulos de rotao da manivela e obtendo os respectivos pontos
do extremo do vetor K. Os pontos obtidos
1
,
2
, etc. se unem consecutivamente em ordem angular
formando uma curva continua, a qual representa um diagrama polar da fora K com seu centro em um
ponto 0.
Filiada :
26
Cinemtica, dinmica e equilbrio
de motores
Fig. 222. Construo do diagrama polar de carga sobre o mancal de biela (dois valores de ngulos de )
Para obter o diagrama polar da carga sobre o mancal de biela suficiente deslocar verticalmente o
centro O, no diagrama polar obtido para a fora K, para a magnitude do vetor
2
R m Z
br R
m
= passando
ao ponto O
m
e unir os pontos
1
,
2
, etc. Este diagrama, construdo por pontos a cada 30
o
do ngulo de
rotao do virabrequim para um motor rpido de ciclo Otto de quatro tempos, se representa na Fig. 223, a.
A projeo de qualquer vetor do diagrama polar sobre a vertical tem como resultado o valor da fora
normal ,
.
m
R b m
Z Z Z + = que atua sobre o mancal de biela e est orientada seguindo o raio da manivela.
Filiada :
27
Cinemtica, dinmica e equilbrio
de motores
Fig. 223. Diagrama polar de carga sobre o mancal de biela e sua reconstruo em coordenadas
retangulares.
O diagrama polar reconstrudo em coordenadas retangulares e R
m.b
(Fig.223, b) permite
determinar o valor mdio ( )
b m
R
.
md
, e por conseguinte, tambm a carga especfica media sobre o mancal,
que se refere a unidade da superfcie de sua projeo diametral:
( )
,
'
. .
.
b m b m
med b m
l d
R
k
=
onde
b m
d
.
o dimetro do mancal de biela;
'
.b m
l , a largura de trabalho da bronzina.
Utilizando o diagrama polar se pode construir o denominado diagrama do desgaste presumvel do
mancal (Fig. 224), que proporciona uma idia convencional sobre o carter do desgaste, si se supem que
este proporcional as foras que atuam sobre o mancal e tem lugar em um setor de
o
60 da direo
instantnea da fora K. Para a construo do diagrama sob um ngulo de 60
o
na direo de cada fora
(Fig. 224, a) em ambos os lados se traa raios anulares, cujas alturas sejam proporcionais a fora
b m
R
.
respectiva. A soma das reas destes raios representa em resumo o diagrama convencional do desgaste
(Fig. 224, b). No diagrama do desgaste do mancal se observa uma zona de mnimas presses sobre ele
mesmo. Este lugar do mancal dever encontrar-se o orifcio para subministrar o leo lubrificante
bronzina.
Filiada :
28
Cinemtica, dinmica e equilbrio
de motores
Fig. 224. Construo do diagrama de desgaste do mancal de biela.
Utilizando o diagrama de carga polar sobre o mancal da biela, pode encontrar-se a fora resultante
R
c
que atua sobre o cotovelo do virabrequim, flexionando o mancal de biela. Para isto, desde o plo 0
m
(veja a Fig. 223, a) se traa verticalmente para baixo a fora centrfuga
2
R m Z
M R
C
= e se encontra o
novo plo 0
c.
O diagrama se transforma ento no diagrama polar da fora resultante que atua sobre o
cotovelo:
.
.
c
R b m c
Z R R
r r r
+ =
A linha C C passa pelo plo
c
O formando um ngulo
0
(paralela ao dimetro do mancal que
passa pelo orifcio de lubrificao). Duas perpendiculares linha C C , tangentes aos pontos extremos
1
e
2
do diagrama polar a cortam em dois segmentos D O
c
e E O
c
.Estes segmentos representam na escala
de foras, para os ngulos de rotao do virabrequim
1
e
2
respectivamente as propores mxima e
mnima ( )
max 0
c
R e ( )
min 0
c
R das foras resultantes
1
c
R e
2
c
R sobre a linha C C (veja a Fig. 223, c) e so
iguais a:
( )
0 0
max 1 1 0
cos
sen T Z R
c
+ = ;
( )
0 0
min 2 2 0
cos
sen T Z R
c
+ = .
Os valores de ( )
max 0
c
R e ( )
min 0
c
R se utilizam para o clculo do mancal de biela a flexo.
A fora resultante
a m
R
.
, com que atua o mancal de apoio em um virabrequim que tem um apoio
(bronzina) principal entre cada par de manivelas, se encontra somando vetorialmente as foras que se
transmitem desde os dois cotovelos vizinhos (Fig. 225). Se considera condicionalmente, que de cada
cotovelo se transmite a metade da fora centrfuga
c
R
Z . Ento:
( ). 5 , 0 5 , 0 5 , 0 5 , 0 5 , 0
. . . c c R b m R b m a m
R R Z R Z R R
c c
+ = + + + =
r r r r r r r
Filiada :
29
Cinemtica, dinmica e equilbrio
de motores
Fig. 225. Construo do diagrama polar da fora com que atua o sexto mancal de bancada sobre a
bronzina em um motor de ciclo Otto de seis cilindros em linha e de quatro tempos cuja ordem de
funcionamento 1-5-3-6-2-4: 1-6 nmeros dos cilindros.
O diagrama polar das foras
a m
R
.
pode ser construdo graficamente, utilizando para estes dois
diagramas polares de carga sobre o mancal de biela.
O primeiro diagrama se orienta com respeito a um cotovelo, o segundo se faz com respeito ao
outro, unindo os plos de ambos diagramas em um ponto (veja Fig. 225) e se somam por pares os vetores
de um e outro diagrama que atuam simultaneamente sobre o cotovelo do virabrequim, levando em conta a
ordem de funcionamento dos cilindros. Cada um dos vetores resultantes obtidos representa uma fora
dupla sobre o mancal de apoio para um ngulo dado de rotao do virabrequim.
Filiada :
30
Cinemtica, dinmica e equilbrio
de motores
Unindo os extremos dos vetores , , ,
3 2 1
...com uma curva suave, se obtm um diagrama polar de
foras que se transmitem ao apoio do mancal de apoio.
O diagrama polar de carga sobre o mancal de apoio, originada pela reao do bronzina, se obtm
girando o diagrama em 180
o
(veja a Fig. 225) com respeito ao virabrequim imvel. Este diagrama se
utiliza para construir o respectivo diagrama de desgaste.
Somando graficamente as curvas dos pares motores M
i
para os cilindros individuais, se constri a
curva do torque total ( ) f M
i
= de um motor multicilndrico. Neste caso as curvas para os cilindros
individuais devero deslocar-se uma com respeito a outra no ngulo , correspondente ao intervalo entre
as seqncias de trabalho dos cilindros citados. Para os motores que quatro tempos com intervalos iguais
entre as seqncias de trabalho i
o
/ 720 = , onde i o numero de cilindros do motor (para os motores de
dois tempos i
o
/ 360 = ).
O par motor total varia com um perodo igual a . A construo de um setor da curva do par motor
total
i
M , correspondente ao ngulo , para um motor de quatro cilndricos de quatro tempos se mostra
na Fig. 226. A curva do par motor para um cilindro se a retirado da fig. 218, e. O valor mdio do par
motor total e:
( )
1 2
2
1
1 F F
d M M
i med t
= =
,
onde F
1
e F
2
so as reas positiva e negativa do diagrama.
Fig. 226. Construo da curva do torque total para um motor de 4 cilindro e 4 tempos.
Filiada :
31
Cinemtica, dinmica e equilbrio
de motores
Em vista de que para construir o diagrama do par motor no se levou em as perdas por frico e no
acionamento dos mecanismos auxiliares, o par motor efetivo real
e
M obtido no eixo e menor que o total
mdio:
( )
m med i e
M M = .
O momento ( )
med i
M o torque indicado mdio do motor e varia proporcionalmente ao trabalho
dos gases por ciclo, j que o trabalho das foras de inrcia em cada revoluo do virabrequim do motor e
igual a zero.
Filiada :
32
Cinemtica, dinmica e equilbrio
de motores
EQUILIBRADO (BALANCEAMENTO) E UNIFORMIDADE DA MARCHA DO MOTOR
Se diz que o motor esta equilibrado se durante um regime estacionrio (constante) de
funcionamento sobre seus suportes se transmitem umas foras cuja magnitude e direo so constantes.
Em um motor no equilibrado a presso sobre os suportes varia continuamente e origina vibraes
do bastidor e do veiculo em seu conjunto, o que vai acompanhado com o enfraquecimento das unies,
com sobrecargas em determinadas pecas, incrementando seu desgaste, e com outros fenmenos
indesejveis.
A primeira causa do desequilbrio no motor de pisto consiste na existncia das foras de inrcia
das massas com movimento alternativo
i
P , que variam em magnitude e em signo, assim como das forcas
centrifugas das massas giratrias
R
Z que variam permanentemente de direo. No motor multicilndrico
as foras
i
P e
R
Z de cada um dos cilindros parcialmente se equilibram, mas em seu conjunto podem
originar a apario de foras de inrcia livres no equilibradas e seus respectivos momentos.
A segunda causa do desequilbrio a irregularidade (variao) do par motor ou torque total
i
M
e do par do volco
v
M que tem um sentido contrario. Analogamente atua tambm o momento de
correo I M = . O par motor total uma funo peridica do ngulo de rotao do virabrequim, por
isso a menor variao possvel das reaes dos suportes se consegue aumentando o numero de cilindros e
respeitando a igualdade dos intervalos entre as seqencias de trabalho, o que assegura uma maior
uniformidade do par motor total.
O motor alternativo no pode estar completamente equilibrado, j que inevitvel a irregularidade
do par motor, o que sempre origina a variao peridica da carga sobre os suportes. Por isso, ao falar
sobre o equilibrado do motor, com este conceito, pelo comum se sobre entende a existncia de um grau de
tolerncia de vibrao como resultado das medidas construtivas e de produo adotadas, que permitem
eliminar em uma ou outra medida as causas que suscitam o desequilbrio.
O equilibrado do motor na pratica se realiza elegendo correspondentemente o numero e a posio
dos cilindros, a disposio das manivelas do virabrequim, assim como a colocao dos contrapesos. Para
conhecer o grau de equilibrado geralmente se limitam a anlises das foras de inrcia e de seus momentos
de primeira e segunda ordem, ademais sem considerar o possvel desconcentrado que possam ter os eixos
dos cilindros ( ) 0 = = kR e .
Para obter o equilibrado construtivo previsto se apresenta tambm uma srie de requisitos ante a
produo das peas individuais do motor enquanto as tolerncias em suas massas e dimenses.
A fixao destas tolerncias est condicionada pela necessidade de cumprir em maior ou menor
grau as condies seguintes:
1) igualdade de massas nos diferentes conjuntos de peas do pisto;
2) igualdade de massa das bielas e idntica posio de seus centros de gravidade;
3) equilibrado dinmico do virabrequim.
O equilibrado das foras de inrcia das massas giratrias do mecanismo biela-manivela se
consegue colocando as massas giratrias nas manivelas ou os contrapesos, de tal maneira que se
completem as duas condies seguintes:
Filiada :
33
Cinemtica, dinmica e equilbrio
de motores
1) o centro de gravidade do sistema reduzido do virabrequim se encontre no eixo de rotao;
2) a soma dos momentos das foras centrifugas de inrcia das massas giratrias com respeito a
qualquer ponto do eixo do virabrequim seja nula.
A realizao da primeira condio se obtm aplicando o equilibrado esttico e se comprova
montando o virabrequim sobre prismas. Esta condio de equilibrado se expressa analiticamente pela
igualdade a zero da resultante de todas as foras centrfugas de inrcia.
A realizao da segunda condio (realizando simultaneamente a primeira), se assegura mediante
o equilibrado dinmico, no qual se comprova fazendo girar o virabrequim em mquinas equilibradoras.
Ambas as condies de equilibrado correspondem a rotao do virabrequim em torno ao seu eixo
principal central de inrcia.
Fig. 227. Equilibrado de virabrequim a de manivela nica; b de dois cotovelos
Em um virabrequim de uma s manivela a soma das foras centrfugas desenvolvidas pelos dois
contrapesos devero ser iguais e de direo contraria a fora centrfuga Z
R
(Fig. 227,a):
R cp
Z Z = 2
ou
2 2
2 R m m
R cp
=
Portanto, a massa de cada contrapeso ser:
R cp
m
R
m
2
1
= .
No virabrequim de dois cotovelos, o momento criado pelas foras centrifugas de dois contrapesos
deve equilibrar o momento criado pelas foras centrifugas que aparecem durante a rotao de duas
manivelas (Fig. 227, b):
a Z b Z
R cp
= ou a R m b m
R cp
2 2
= .
Filiada :
34
Cinemtica, dinmica e equilbrio
de motores
Desta maneira:
( )
R cp
m R
b
a
m / = .
Os virabrequins simtricos de cotovelos mltiplos dos motores multicilndricos geralmente se
equilibram em conjunto sem colocar contrapesos. Sendo assim, freqentemente se dotam de contrapesos
com propsito de diminuir os momentos que flexionam o virabrequim, e descarregar as bronzinas
principais. Os contrapesos asseguram, no mais, uma distribuio mais uniforme da presso ao redor do
mancal de bancada (mancal de apoio).
No caso que os contrapesos se instalem na prolongao dos braos de cada cotovelo (Fig. 227), no
diagrama polar de carga convencional, sobre o mancal de bancada ser necessrio deslocar o plo
c
O
(Fig. 228) ao ponto
cp
O ao largo da linha bissetriz do anulo entre os cotovelos na direo do diagrama
polar a uma magnitude de
cp cp cp
Z Z R
r r r
+ = . Se a construo se efetua na escala dos diagramas polares para
os mancais de biela, ento no lugar de
cp
R
r
se traa
cp
R
r
2 .
Fig. 228. Reduo da carga no mancal de bancada instalando contrapesos.
Nos virabrequins assimtricos de manivelas mltiplas o equilbrio dinmico resulta possvel
somente colocando contrapesos. Se esta colocao no prolongamento de cada brao no e conveniente ou
resulta dificultosa, ento o momento longitudinal M
R
se equilibra combinando a montagem de um menor
nmero de contrapesos, mas com a condio de que
R cp
M M = e alem disso, se encontre no mesmo plano
que o momento longitudinal.
Filiada :
35
Cinemtica, dinmica e equilbrio
de motores
Na continuao se estudam os procedimentos do equilibrado nos diferentes tipos de motores.
Motor monocilndrico.
Neste motor a soma das foras centrifugas se equilibra com contrapesos que se colocam no
prolongamento dos braos da manivela; enquanto isso, as forcas de inrcia de primeira ordem
iI
P e
segunda ordem
iII
P podem equilibrar-se somente com ajuda de um sistema de contrapesos adicionais (Fig.
229).
Fig. 229. Equilibrado das forcas de inrcia em um motor monocilndrico, aplicando o sistema de
contrapesos que giram no plano de rotao da manivela.
A fora de inrcia
iI
P se equilibra colocando um contrapeso em cada um dos dois eixos A e A,
paralelos ao eixo do virabrequim e dispostos simetricamente a ambos os lados do bloco do motor, que
giram em direes opostas com uma velocidade igual freqncia de rotao do virabrequim. Os
contrapesos se montam em um plano que passa pelo eixo do cilindro e perpendicular ao eixo do
virabrequim, alem disso, se colocam de tal maneira que durante a rotao sempre conformam com a linha
vertical um ngulo igual ao ngulo de rotao do virabrequim. (No motor com mecanismo biela
manivela descentrado esse ngulo deve ser igual a
o
k 3 , 57 . = ). As componentes horizontais
Filiada :
36
Cinemtica, dinmica e equilbrio
de motores
das foras centrifugas de inrcia destes contrapesos so de igual magnitude, mas esto dirigidas em
sentido contrario e, portanto, se equilibram mutuamente.
A resultante das componentes verticais das foras centrifugas de inrcia dos contrapesos esta
situada no eixo do cilindro e dirigida em sentido contrario da fora de inrcia. Esta resultante e
( ) cos 2 cos 2 2
2
I cpI cpI
x
cpI
m Z R = = .
Se a massa de cada contrapeso se elege cumprindo a condio R m m
i I cp
= 2 ou seja,
( )
i I cp
m R m 2 / 1 = , ento a resultante das componentes verticais das foras centrifugas de inrcia dos
contrapesos adicionais equilibrara a fora de inrcia de primeira ordem.
Para equilibrar a fora de inrcia de segunda ordem se instala um contrapeso em cada um dos
outros dois eixos B e B situados analogamente aos primeiros, mas que giram com dupla velocidade
angular do virabrequim. Os contrapesos se colocam de tal maneira que durante a rotao sempre
conformam com a vertical o angulo 2, igual ao duplo ngulo de rotao do virabrequim. As
componentes horizontais das foras centrifugas de inrcia dos contrapesos, se equilibram entre si. A
resultante dos seus componentes verticais iguais a
( ) ( ) 2 cos 2 2 2 cos 2 2
2
II cpII cpII
x
cpII
m Z R = =
equilibra a fora de inrcia de segunda ordem, se a massa de cada contrapeso adicional se elege partindo
da condio
( )
2 2
2 2 R m m
i II cpII
= ,
Ou seja
i
II
cpII
m
R
m
8
1
= .
Semelhante equilibrado dos motores monocilndricos se realiza somente em bancos experimentais
especiais destinados a efetuar trabalhos de investigao. Na maioria dos motores monocilndricos se
limitam a colocar na prolongao dos braos do virabrequim contrapesos com uma massa maior
( )
cp cp
m m + . Como resultado deste equilibrado denominado excessivo se consegue diminuir a magnitude
absoluta da componente vertical da forca de inrcia no equilibrada de primeira ordem (aparecendo
simultaneamente a componente horizontal no equilibrada da fora centrifuga dos contrapesos).
Motor dos cilindros em linha
O virabrequim deste motor (Fig. 230, a) tem as manivelas dispostas a 180
o
, equilibradas por
contrapesos.
Filiada :
37
Cinemtica, dinmica e equilbrio
de motores
Fig. 230. Esquemas de virabrequins para motores de dois cilindros. a em linha; b com cilindros opostos.
As foras de inrcia de primeira ordem para o primeiro e segundo cilindros se equilibram:
cos
1
C P
iI
= ,
2
R m C
i
=
( ) cos 180 cos
2
C C P
o
iI
= + =
.
Sendo assim, elas do lugar fora no equilibrado com o momento cos aC M
iI
= , que atua no
plano conformado pelos eixos dos cilindros.
As foras de inrcia de segunda ordem para os dois cilindros 2 cos
1
C P
iII
= ;
( ) 2 cos 180 2 cos
2
C C P
o
iII
= + = so iguais, tem a mesma direo e possuem a resultante:
2 cos 2 C P
iII
=
.
O momento das foras de inrcia de segunda ordem . 0 =
iII
M
Motor de dois cilindros opostos de quatro tempos
Neste motor se amplia um virabrequim de duas manivelas dispostas a 180
o
, equilibrado com
contrapesos (fig. 230, b).
As foras de inrcia de primeira e segunda ordem para o primeiro cilindro so iguais as respectivas
foras de inrcia do segundo cilindro, mas esto dirigidas sempre em sentido contrario. Portanto, suas
Filiada :
38
Cinemtica, dinmica e equilbrio
de motores
foras resultantes so nulas. Posto que os eixos dos cilindros so paralelos, as foras do lugar a um par
que atua no plano conformado pelos eixos dos cilindros, o qual no esta equilibrado:
( ) 2 cos cos + = + = aC M M M
iII iI i
.
Motor de quatro tempos com quatro cilindros em linha
O virabrequim deste motor (Fig. 231) tem manivelas dispostas a 180
o
. O virabrequim esta
equilibrado, quer dizer, 0 =
R
Z e 0 =
R
M .
Fig. 231. Esquema de um virabrequim de um motor em linha, de quatro tempos e quatro cilindros.
As foras de inrcia de primeira ordem para o primeiro e quarto cilindros so
cos C P
iI
= ,
Enquanto que para o segundo e terceiro cilindros
( ) cos 180 cos C C P
O
iI
= + = .
Portanto sua resultante 0 =
iI
P . Por efeito da ao simtrica destas foras com respeito ao ponto
mdio do virabrequim, o momento 0 =
iI
M .
As foras de inrcia de segunda ordem para os cilindros primeiro e quarto ser:
2 cos C P
iII
= ,
e para os cilindros segundo e terceiro
( )
o o
iII
C C P cos 180 2 cos = + = .
Portanto, todas essas foras so iguais e sempre esto dirigidas em um mesmo sentido. Sua
resultante :
= 2 cos 4 C P
iII
.
O momento das foras de inrcia de segunda ordem . 0 =
iII
M
Filiada :
39
Cinemtica, dinmica e equilbrio
de motores
Motor de quatro tempos de seis cilindros
O virabrequim tem as manivelas dispostas a 120
o
(Fig, 232) e esta equilibrado, ou seja, 0 =
R
Z e
. 0 =
R
M
Fig. 232. Esquema de um motor em linha, de quatro tempos e de seis cilindros.
As foras de inrcia de primeira e segunda ordem para os cilindros primeiro e sexto so
iII iI
P C P , cos = , cos C P
iII
= :
para os cilindros segundo e quinto
( ) + =
o
iI
C P 120 cos , ( ) + =
o
iII
C P 240 2 cos ;
para os cilindros terceiro e quarto
( ) + =
o
iII
C P 120 cos , ( ). 120 2 cos + =
o
iII
C P
A fora de inrcia resultante de primeira ordem para todos os cilindros
( ) ( ) [ ] . 0 120 cos 240 cos cos 2 = + + + + =
o o
iI
C P
Analogamente, a fora de inrcia resultante de segunda ordem
= . 0
iII
P
Por efeito da disposio especular (simetria de espelho) das manivelas do virabrequim, as foras
de inrcia no originaro nenhum momento longitudinal, ou seja, 0 =
iI
M e . 0 =
iII
M
Motor de dois cilindros em V formando um ngulo de 90
o
O virabrequim deste motor tem um cotovelo na qual se unem as bielas de ambos os cilindros
situados em um mesmo plano (Fig. 233).
Filiada :
40
Cinemtica, dinmica e equilbrio
de motores
Fig. 233. Esquema de um motor de dois cilindros em V formando um ngulo de 90
o
: 1-2- nmeros dos
cilindros
As massas rotativas originam a fora centrifuga
2
R m Z
R R
= , a qual se equilibra com dois
contrapesos instalados nos prolongamentos dos braos da manivela do virabrequim.
As foras de inrcia de primeira ordem:
para o primeiro cilindro
cos
1
C P
iI
= ,
para o segundo cilindro
( ) Csen C P
o
iI
= = 90 cos
2
.
Estas foras so mutuamente perpendiculares, por isso sua resultante
( ) ( )
2 2
2
2
1
R m C P P R
i iI iI iI
= = + = .
O ngulo que forma a resultante com o eixo do primeiro cilindro :
= =
1
2
iI
iI
P
P
arctg .
A resultante das foras de inrcia de primeira ordem R
iI
tem magnitude constante e sempre esta
orientada seguindo o raio da manivela. Por tanto pode ser equilibrada simplesmente aumentando a massa
dos contrapesos, colocados na prolongao dos braos da manivela do virabrequim para equilibrar as
foras centrfugas das massas rotativas. A massa adicional para cada contrapeso se determina pela
equao
2 2
2 R m m
i cp
= ,
da qual
i cp
m
R
m
2
1
= .
As foras de inrcia de segunda ordem:
Filiada :
41
Cinemtica, dinmica e equilbrio
de motores
para o primeiro cilindro
2 cos
1
C P
iII
=
para o segundo cilindro
( ) 2 cos 90 2 cos
2
C C P
o
iII
= = .
A resultante das foras
( ) ( ) 2 cos 2
2
2
2
1
C P P R
iII iII iII
= + = .
O ngulo que forma a resultante das foras de inrcia de segundo ordem com o eixo do primeiro
cilindro, se encontra da expresso
1
2
1
iII
iII
P
P
tg =
1
=45
o
ou
o
135 .
Por conseguinte, a resultante das foras de inrcia de segunda ordem 2 cos 2 C R
iII
= no esta
equilibrada, varia seguindo uma lei harmnica e atua ao largo do eixo 0
v
, ou seja, em direo horizontal.
Para outros ngulos entre os eixos dos cilindros que no sejam iguais a 90
o
, as equaes para as
foras de inrcia se complicam.
Motor de oito cilindros em V formando um ngulo de 90
o
Neste motor (Fig. 234,a e b) o virabrequim assimtrico e tem as manivelas dispostas em dois
planos perpendiculares. O motor pode ser considerado como a unio de 4 motores de dois cilindros em V.
A resultante das foras Z
R
e C nula, mas tendo em vista que, o virabrequim no simtrico atuam os
momentos longitudinais M
R
e M
iI
. A magnitude destes momentos pode encontrar-se tomando os
momentos das foras com respeito ao centro do virabrequim O. O momento total que origina as foras das
manivelas primeira e quarta, atuam no plano destas ultimas e igual a 3aZ
R
e 3aC. O momento total das
foras nas manivelas segunda e terceira atua no plano perpendicular a primeira e igual a aZ
R
e aC.
Filiada :
42
Cinemtica, dinmica e equilbrio
de motores
Fig. 234. Esquema de um mtor de Oto cilindros, de quatro tempos em V formando um ngulo de 90
o
.
O momento resultante (Fig. 234, c) se obtm somando geometricamente estes momentos:
( ) ( )
R R R R
aZ aZ aZ M 10 3
2 2
= + =
e respectivamente
( ) ( ) aC aC aC M
iI
10 3
2 2
= + = .
O plano em que atua o momento resultante se determina pelo ngulo entre aquele e o plano da
primeira manivela:
( )
( )
6 2 180 ,
3
1
3
= =
+
+
=
o
R
R
C Z a
C Z a
tg .
Filiada :
43
Cinemtica, dinmica e equilbrio
de motores
O momento resultante pode ser equilibrado tanto por contrapesos que se instalam em cada
manivela, como por dois contrapesos colocados nos extremos do virabrequim no plano onde atua o
momento.
Este ultimo caso a massa de cada contrapeso se determina da condio de igualdade dos
momentos:
( ) C Z a b m
R cp
= 10
2
,
de onde
( ) ( ). 10 / 10
2
i R R cp
m m
R
b
a
C Z
b
a
m + = =
As resultantes das foras de inrcia de segundo ordem para cada par de cilindros em
correspondncia com a situao das manivelas so iguais a:
2 cos 2 C , para a primeira manivela;
( ) 2 cos 2 90 2 cos 2 C C
o
= + , para a segunda manivela;
( ) 2 cos 2 270 2 cos 2 C C
o
= + , para a terceira manivela;
( ) 2 cos 2 180 2 cos 2 C C
o
= + , para a quarta manivela.
Estas resultantes se encontram no plano horizontal, so iguais em sua magnitude, mas de signos
opostos em pares. Por conseguinte, sua resultante ser nula ( ) 0 =
iII
R . O momento M
iII
tambm resulta
nulo.
Motor de quatro tempos, de doze cilindros em duas fileiras
O motor de doze cilindros em duas fileiras pode considerar-se como o conjunto de dois motores de
seis cilindros em linha com um virabrequim comum de seis manivelas. Em cada motor de seis cilindros,
as foras de inrcia de primeira e segundo ordem, assim como seus momentos, esto equilibrados;
portanto, isto tambm se cumpre para o motor de doze cilindros em duas fileiras, independentemente da
magnitude do ngulo entre as linhas de cilindros.
Para cumprir a igualdade dos intervalos entre as carreiras de trabalho de cada um dos cilindros, o
ngulo entre as linhas de cilindros deve ser mltiplo de 60
o
. Sendo assim, em alguns casos, com a
finalidade de reduzir as dimenses do motor e atentando um pouco contra a uniformidade do torque se
adota um ngulo entre os cilindros que se desvia da condio anteriormente assinalada. Ento os
percursos de trabalhos nos diferentes cilindros se realizam a intervalos desiguais de tempo.
Uniformidade da marcha do motor
A dinmica e o equilibrado do motor se investigou aplicando o mtodo cintico-esttico, alem
disso, se supem que o virabrequim e absolutamente rgido e gira a velocidade angular constante =
const, qual correspondem determinadas foras de inrcia e foras no sistema biela-manivela.
Em realidade, inclusive durante o regime de funcionamento estacionrio do motor a velocidade
angular do virabrequim no permanece constante, se no, varia periodicamente: ( ). t f = A causa
Filiada :
44
Cinemtica, dinmica e equilbrio
de motores
principal da variao peridica da velocidade angular consiste na mencionada irregularidade do par motor
ou torque, condicionada pela periodicidade do processo de trabalho e pelas propriedades cinemticas do
mecanismo biela manivela. Sendo constante o monumento mdio de resistncia (carga til constante), o
par motor irregular origina a correspondente inuni-formidade da marcha (rotao do virabrequim) do
motor. Por efeito da irregularidade do torque, em um virabrequim flexvel se engendram oscilaes
torsionais que incrementam a irregularidade de rotao do virabrequim e podem dar lugar a sua
destruio.
Fig. 235. Momentos torores totais para motores com diferentes nmeros de cilindro.
O grau de uniformidade na variao do torque total do motor geralmente apreciado pelo
coeficiente de irregularidade do torque
( )
med i
i i
M
M M
min max
= .
Filiada :
45
Cinemtica, dinmica e equilbrio
de motores
O coeficiente varia para um mesmo motor ao variar seu regime de funcionamento. A
irregularidade do torque diminui quando aumenta o nmero de cilindros do motor (Fig. 235). Como se
desprende de tal figura o coeficiente diminui rapidamente a medida que cresce o nmero de cilindros.
Em cada instante o torque do motor se equilibra com o momento de resistncia que se aplica ao
virabrequim, e o momento das foras de inrcia de todas as massas rotativas, reduzidas as massas
rotativas equivalentes:
, 0
0
= +
i r
M M
dt
d
I
(264)
onde M
r
o momento de resistncia que considera tambm, o momento das foras de frico no prprio
motor e o momento consumido em acionar os mecanismos auxiliares;
0
I , o momento de inrcia de todas
as massas reduzidas ao eixo do virabrequim; = dt d , a acelerao angular do virabrequim.
A continuao, ao momento de resistncia (includas as perdas internas) se consideram constante e
igual ao valor mdio do torque indicado do motor, enquanto que se depreciar a variao do momento de
inrcia reduzido
0
I . Ento, as oscilaes da velocidade do virabrequim estaro condicionadas somente
pela variao do valor instantneo
i
M com respeito ao valor mdio ( ) . med M
i
Na Fig. 236 se
representa a curva do torque do motor e se mostra seu valor mdio
r med
M M = .
Fig. 236 Variao do torque e da velocidade angular do virabrequim para um regime estacionrio de funcionamento
do motor.
Segundo a equao (264)
Filiada :
46
Cinemtica, dinmica e equilbrio
de motores
= .
0
dt d I M M
r i
No ponto a, correspondente a rotao do virabrequim em um ngulo
1
, a diferena
= 0
r i
M M e a acelerao angular resulta nula, havendo sido at ento negativa; portanto, neste
ponto, a velocidade angular mnima.
A acelerao angular depois passa a ser positiva, at que no ponto b correspondente a rotao do
virabrequim em um ngulo
2
, de novo resulta nula, enquanto que a velocidade angular alcanar seu
mximo valor.
Tendo em conta que
d
d
d
d
dt
d
d
d
dt
d
2
2
1
= = =
a equao (264) se pode escrever em forma de teorema sobre a energia cintica
( )
2
2
0
I
d d M M
r i
(265)
que expressa neste caso a igualdade do trabalho elementar do par motor e do momento de resistncia com
a diferencial da energia cintica de todas as massas em movimento do motor.
Integrando a equao (265) entre os limites
1
e
2
(correspondentes aos limites
max
e
min
),
obteremos
( )
=
2
1
max
min
2
0
2
1
I d
d M M
r i
( ) = =
2
min
2
max
0
2
I
( ).
2
min max
min max
0
+
= I (266)
A oscilao da velocidade angular ( ) f = para o regime estacionrio, ou seja, a uniformidade
de rotao do virabrequim esta caracterizada pelo grau de irregularidade de rotao
med
min max
= .
Se adotamos aproximadamente que a velocidade angular media
2
min max
+
= =
med
ento a equao (266) pode escrever-se da seguinte maneira
2
0
I L
ex
= ,
Filiada :
47
Cinemtica, dinmica e equilbrio
de motores
onde
ex
L o trabalho excedente do torque, proporcional a superfcie
1
F .
Fixando o coeficiente de irregularidade (a partir da equao para
ex
L ), pode encontrar-se o
momento de inrcia do volante ( )
0
9 , 0 8 , 0 I I
v
= .
Se o volante est feito em forma de disco com coroa robusta, seu momento de inrcia se determina
fundamentalmente pelo momento de inrcia da coroa cuja massa
v
m .
,
4
1
2 2
m v m v v
D m r m I =
onde
m m
r D 2 = o dimetro mdio da coroa.
O momento de inrcia do volante deve ser tal que assegura o funcionamento do motor mnima
velocidade estvel de rotao em marcha lenta o que predetermina o mximo valor tolervel do grau de
irregularidade de rotao. Nos motores para veculos aproximadamente igual a 0,02 0,03. Para
valores admissveis muito pequenos de o momento de inrcia do volante
v
I ser excessivamente
grande, o que piora a capacidade de acelerao do motor e do veculo. Ao mesmo tempo, sendo
demasiado pequena a magnitude de
v
I , se dificulta a partida do motor.
Para a maioria dos motores veiculares, o momento de inrcia adimensional do volante
,
.
2
const
M
I
nom e
nom v
=
onde
nom e
M
.
o torque efetivo do motor no regime nominal de potencia a velocidade de rotao
nom
n ,
correspondente a velocidade angular do virabrequim
. nom
Sobre esta base pode determinar-se aproximadamente o momento de inrcia do volante pela
formula
2
.
nom
nom e
v
M
I
= ,
onde . 350 ... 200 =
Filiada :
48
Cinemtica, dinmica e equilbrio
de motores
4. CLCULO DINMICO DO MOTOR
4.1. Desenvolvimento do diagrama indicado em funo dos graus de giro do virabrequim (manivela)
O ponto de partida para determinar as foras oriundas da presso dos gases em funo do ngulo de giro
do virabrequim, o diagrama indicado em coordenadas P-s obtido como resultado do calculo trmico.
Para a transformao do diagrama se procede a desenh-lo com a mesma escala com que foi construdo a
partir do calculo trmico.
Na direita do diagrama indicado (Fig. 4-1) se traa o novo sistema de coordenadas P
g
de forma tal que
o eixo das abscissas (, ngulo de giro do virabrequim) resulte da prolongao da linha de presso
atmosfrica P
o
do diagrama P S. Assim, no eixo das ordenadas se ter em escala m
p
mm m
MN
2
a presso
neta exercida sobre o pisto:
o g g
P P P = .
Filiada :
49
Cinemtica, dinmica e equilbrio
de motores
No eixo das abscissas se colocam os valores dos ngulos de giro do virabrequim at 720
o
para motores
de 4 tempo e 360
o
para motores de 2 tempo. Para a escala dos ngulos de giro do virabrequim se
recomenda:
=
mm
m
o
2
.
A identificao dos ngulos de giro do virabrequim com os correspondentes valores do deslocamento do
pisto feito pelo mtodo de Bricks:
Se traa, em baixo do diagrama P&S, sobre o segmento AB =S um semicrculo com cento no
pondo mdio de dito segmento. Quando gira a manivela um ngulo o deslocamento
correspondente ao pisto ser igual ao segmento AC
. O centro de rotao est deslocado em
relao ao ponto O em direo ao PMI na magnitude:
s
m
S
4
= ,
'
OO =
Para os motores de 4 tempos (duas voltas completas do virabrequim), o mesmo valor de
deslocamento ter lugar 4 vezes, na admisso, compresso, expanso e escapamento (Fig. 4-1).
Para um motor de dois tempos, duas vezes, na compresso e expanso.
Se traa uma reta paralela ao eixo das ordenadas para obter 4 pontos de intercepo com as
curvas correspondentes aos processos individuais do diagrama indicado (pontos 1,2,3 e 4). A
seqncia dos passos para o desenvolvimento do diagrama indicado nas novas coordenadas, se
apresenta na Fig. 4-1 mediante flechas.
Pode-se apreciar que para cada de x
correspondem 4 pontos no diagrama desenvolvido. Este
processo necessrio execut-lo para:
0
o
, 20
o
, 40
o
, 60
o
, 80
o
, 100
o
, 120
o
, 140
o
, 160
o
e 180
o
.
Na zona de combusto visvel (prximo ao PMS, ao final do processo de compresso e inicio do
processo de expanso), o desenvolvimento do diagrama deve executa-se em menores intervalos
de presso, cada 5
o
.
4.2. Determinao das foras de inrcia das massas em movimento retilneo alternativo P
j
.
( )
+ =
2
6 2
10 2 cos cos
m
MN
r m P
j j
, onde:
P
j
a foras de inrcia das massas em movimento retilneo alternativo, correspondente unidade de
superfcie do pisto
2
m
MN
.
Filiada :
50
Cinemtica, dinmica e equilbrio
de motores
m
j
a massa construtiva (correspondente unidade de superfcie do pisto) dos elementos em movimento
retilneo alternativo
2
m
kg
:
+ =
2
' ' '
m
kg
Am m m b p j , onde:
m
p
a massa construtiva do grupo pisto
2
m
kg
m
b
a massa construtiva da biela
2
m
kg
A =0,25 0,30
m
p
e m
b
se selecionam a partir de dados estatsticos para motores similares:
Massa construtiva m
[kg/m
2
]
Elementos do mecanismo
biela manivela
D =60 100 mm
Ciclo Otto
D =80 130 mm
Ciclo diesel
Grupo pisto 80 150 150 300
Biela 100 200 250 400
Parte desbalanceada da
manivela
100 200 150 400
Para selecionar m
p
e m
b
se deve ter em conta que seus valores devem ser menores para os valores
maiores de S/D (S/D =07 1,0), assim como para os motores rpidos.
[ ] m
S
r
2
= , radio da manivela.
=
s
n 1
30
, velocidade angular do virabrequim. n em rpm (para Potncia Nominal)
As magnitudes da funo ( ) 2 cos cos + para diferentes valores de e , podem ser verificadas na
tabela 4-2:
Filiada :
51
Cinemtica, dinmica e equilbrio
de motores
O clculo da magnitude da fora P
j
feita para os mesmos valores de do diagrama desenvolvido da
fora de presso dos gases P
g
.
4.3. Determinao da fora P
Para determinar P
necessrio:
1. Construir uma Tabela 4-3 resumo.
2. Na coluna 3 da tabela se colocam todos os valores de clculo do ngulo de giro do virabrequim
para um ciclo completo de trabalho (4 tempos de 0
o
at 720
o
, para 2 tempos 0
o
at 360
o
)
3. Colocar na coluna 4 os resultados P
g
Obtidos no diagrama desenvolvido da foras dos gases da
combusto para os diferentes valores de :
( )
=
2
m
MN
m h P
p g
onde ( ) h a ordenada da fora dos gases [mm] em funo de .
4. Escrever na coluna os valores da funo ( ) 2 cos cos + para todos os valores de clculo de .
5. Calcular a magnitude:
=
2
6 2 '
10
m
MN
r m C j
Filiada :
52
Cinemtica, dinmica e equilbrio
de motores
6. Determinar a magnitude da Fora de Inrcia P
j
() para todos os valores de clculo de ,
multiplicando cada valor da coluna 5 pelo valor correspondente de C.
7. Calcular e colocar na coluna 7 os valores de P
() para todos os valores de clculo de :
( ) ( )
j g
P P P + =
8. Com os dados das colunas 6 e 7 construir os grficos P
j
e P
na mesma escala
mm m
MN
m
p 2
que a
fora P
g
, Obtida no diagrama desenvolvido. Ver Fig. 4-2.
Filiada :
53
Cinemtica, dinmica e equilbrio
de motores
4.4. Clculo das foras que atuam sobre os elementos do mecanismo biela manivela. (foras N
, T
e K
:
Filiada :
54
Cinemtica, dinmica e equilbrio
de motores
1. Nas colunas 8, 10 e 12 da Tabela 4-3 se colocam os valores das funes trigonomtricas
correspondentes, as quais se determinam pelas Tabelas 4-4, 4-5 e 4-6 para todos os valores de
clculo de em funo de (o ngulo define a inclinao da manivela).
2. Calculam-se os valores de N
, T
e K
:
( ) ( ) tg P N
= ,
( ) ( )
( )
cos
cos +
=
P K e
( ) ( )
( )
cos
+
=
sen
P T .
3. Em baixo dos grficos das foras P
g
, P
j
e P
e na mesma escala m
p
se constri as curvas das foras
N
, T
e K
. Unicamente com a fora N
pode fazer-se uma exceo e variar a escala.
Filiada :
55
Cinemtica, dinmica e equilbrio
de motores
4.5. Construo da curva do momento toror (torque)
Filiada :
56
Cinemtica, dinmica e equilbrio
de motores
Em motores alternativos policilndricos, o torque dos diferentes cilindros, se sumam no virabrequim, de
onde se obtm o torque resultante M
aplicado aos elementos de trao:
= =
= =
i
k
i
k
k k
T r M M
1 1
, onde :
i - nmero de cilindros
r - radio da manivela
T
k
- fora tangencial T que atua na manivela de cada cilindro
M
k
- torque de cada manivela.
As foras T
k
que atuam sobre cada manivela, se diferenciam entre elas porque as curvas que as
representam esto deslocadas com relao a T
1
do primeiro cilindro um ngulo
1-k
em dependncia da
ordem de ignio e dos ngulos de alternao da combusto de seus diferentes cilindros (ngulo entre
manivelas).
Desta forma para obter M
imprescindvel somar as foras T
k
que atuam sobre todas as manivelas para
cada valor de clculo de grau de giro do virabrequim .
A seqncia para construir a curva
=
i
k
k
T
1
se amostra na Fig. 4-3 para caso de um motor de 4 tempos, 4
cilindros com disposio linear (estas curvas tem um carter demonstrativos).
Dado
=
i
k
k
T r M
1
, onde r =constante, a curva obtida como resultado da construo expressa;
=
i
k
k
T
1
representa o M
em uma nova escala:
=
mm
Nm
rF m m
p p M
6
10 , onde:
m
p
- escala de fora T
mm m
MN
2
r - radio da manivela [m]
4
2
D
F
p
= - rea do pisto [m
2
]
D - dimetro do cilindro [m].
Para os motores com alternao uniforme dos tempos de potencia, pode ser utilizada uma forma abreviada
na construo do torque resultante (ver Fig. 4-4). Para isso, a curva T =f() se divide em i espaos iguais
de longitude , onde
i
720
= para os motores de quatro tempos e
i
360
= para os motores de dois
Filiada :
57
Cinemtica, dinmica e equilbrio
de motores
tempos (i a quantidade de cilindros). Seguidamente se translada os i segmentos de longitude da curva
T, realizando-se a soma sobre um desses segmentos.
Para ambos os mtodos, finalmente se obtm uma fora somatria peridica T que em outra escala
representa a M
.
4.6 Determinao do momento indicado do motor
O torque indicado do motor multicilindro M
i
igual ao valor mdio de seu momento indicado M
(med)
:
( )
d T
m
d M M M
i
k
k
M
med i
= = =
=
4
0
1
4
0
4 4
1
Filiada :
58
Cinemtica, dinmica e equilbrio
de motores
Para os motores com distribuio (alterao) uniforme dos tempos de potencia teremos:
( )
d T
m
d M M M
i
k
k
M
med i
= = =
=
0 0
1
1
Desta forma temos:
[ ] Nm m
OA
F F
M
M i
2 1
= , onde:
F
1
e F
2
reas respectivamente positivas e negativas abaixo da curva [ ] mm T
i
k
k
=1
(ver Fig. 4-4).
OA - espao correspondente ao perodo de variao de [ ] mm T
i
k
k
=1
O valor de M
i
obtido deve ser igual ao momento indicado do motor, calculado mediante ao clculo
trmico.
( )
[ ] Nm
n
N
M
m
e p
i
=
4
10 3
, onde:
N
e
- potencia nominal do motor projetado [KW].
n nmero de revolues por minuto do virabrequim no regime de potencia nominal.
m
- rendimento mecnico do motor para o regime nominal.
Realizando um correto desenvolvimento do clculo dinmico o erro relativo deve cumprir:
( )
05 , 0
=
i
p
i i
M
M M
Em vista que para construir o diagrama de torque no se tive em conta, as perdas mecnicas por atrito e
em acionar os mecanismos auxiliares do motor, o torque efetivo real M
e
obtido no eixo do motor :
m i e
M M =
4.7 Construo do diagrama polar de carga do mancal de biela (D.P.C.M.B)
Durante o trabalho do motor, sobre o mancal de biela atuam as foras K e T assim como tambm a fora
centrfuga F
rb
originada pela massa em rotao da biela (m
bc
) concentrada no eixo do mancal de biela.
Para calcular a carga que atua sobre o mancal de biela se constri seu diagrama polar de foras do qual se
determina a magnitude e o carter da distribuio ao redor da periferia do mancal.
Para construir o D.P.C.M.B. se parte das relaes de K e T obtidas durante o clculo dinmico e o ngulo
de giro do virabrequim (ver Fig. 4-5).
Filiada :
59
Cinemtica, dinmica e equilbrio
de motores
A cada valor de clculo do ngulo de giro do virabrequim lhe correspondem os valores das foras K
e T
na mesma escala m
p
mm m
MN
2
nos eixos correspondentes de coordenadas do diagrama polar (+T e -K)
onde se realiza a soma geomtrica T
+K
=S
.
Filiada :
60
Cinemtica, dinmica e equilbrio
de motores
O extremo do raio vetor S
, resulta assim uns dos numerosos pontos do diagrama correspondente ao
ngulo de giro (o valor do ngulo , no qual se determina o ponto dado, se anota ao lado dele para a sua
identificao).
Unindo sucessivamente todos os pontos, desta forma obtidos (a quantidade de pontos ser igual ao dos
valores de clculo do ngulo ), resultar o diagrama polar da fora S.
Para sua converso (D.P.C.M.B), o plo do diagrama desde o ponto O
1
se transporta no comprimento do
eixo K no sentido positivo em uma magnitude O O
1
, sendo:
( ) [ ] mm w r m A
m m
F
O O
b
p p
rb 6 2 '
1
10 1
1
= =
onde:
F
rb
- a fora centrfuga originada pela massa em rotao da biela (m
bc
) concentrada no eixo do mancal de
biela, ( )
'
1
b bc
m A m =
2
'
m
kg
m
b
- massa da biela.
A Fig. 4-5 ilustra a seqencia de obteno do D.P.C.M.B para um valor de ngulo de giro do virabrequim.
O prximo passo o desenvolvimento do D.P.C.M.B em coordenadas cartesianas da fora resultante
sobre o mancal de biela R
mb
& . Este diagrama desenvolvido se constri abaixo dos grficos das foras
K e T e com a mesma escala em ambos os eixos de coordenadas. Isto se realiza medindo a longitude
O para cada ponto do D.P.C.M.B e se desloca sobre o valor correspondente de ao comprimento do
eixo R
mb
do preparado sistema coordenado R
mb
& (ver Fig. 4-5). Este processo se repete para cada valor
de clculo do ngulo.
A Fig. 4-5 mostra a forma do diagrama desenvolvido de carga sobre o mancal da biela, e a seqncia de
obteno de um dos seus pontos.
Do diagrama desenvolvido se determina o valor (R
mb(max)
) mximo, (R
mb(min.)
) mnimo e (R
mb(med)
) mdio
da carga sobre o mancal de biela, correspondente a rea unitria do pisto em
2
m
MN
.
A forma de obter os valores extremos da carga sobre o mancal de biela se ilustra na Fig. 4-5.
O valor mdio da carga igual:
m
( )
=
2
m
MN
m
OB
F
R
p med mb
onde: F rea abaixo da curva em mm
2
.
OB - valor do segmento OB correspondente ao ciclo completo do motor em [mm].
Filiada :
61
Cinemtica, dinmica e equilbrio
de motores
m
p
escala de fora em
mm m
MN
2
.
4.8 Construo do diagrama terico de desgaste do mancal de biela (D.D.M.B)
O diagrama terico de desgaste do mancal de biela, oferece a possibilidade de determinar o ponto mais e
menos carregado do mancal de biela, o qual um passo imprescindvel para a correta colocao do
orifcio de lubrificao sobre este mancal. Este diagrama oferece uma representao aproximada do
carter do desgaste no comprimento da periferia do mancal de biela.
A construo do D.D.M.B se realiza sobre a base de seu D.P.C.M.B.; para isso se procede da forma
seguinte (ver Fig. 4-5):
1. Traar a circunferncia que representa o mancal de biela na escala assumida.
2. Dividir a circunferncia em 12 partes iguais com os raios I, II,...,XII.
3. Levar os vetores R
mb()
, correspondentes aos pontos de clculo do D.P.C.M.B. para a periferia do
mancal. O movimento das foras R
mb()
, se realiza deslocando paralelamente desde o diagrama polar
at a periferia da circunferncia que represente ao mancal de biela, de tal forma que seu
prolongamento passe pelo centro dessa circunferncia. Ao lado de cada raio se escreve uma cifra
que representa a magnitude da fora (se pode tambm expressar o comprimento em mm do vetor). A
Fig. 4-5 mostra a transferncia do vetor R
mb()
desde o D.P.C.M.B. at o D.D.M.B.
4. Em um circulo de papel (preferivelmente cartolina), traado com um raio igual a circunferncia
que representa a sesso do mancal de biela, se recorta um setor de 120. Seguidamente se traa a
linha OC, bissetriz do setor dos 240 restantes.(Ver Fig. 4-5)
5. O setor se coloca sobre a circunferncia que representa o mancal, de forma que seus respectivos
centros coincidam e a reta OC e o raio I fiquem em linha, mas opostos como a continuao um do
outro.
6. Todas as foras que caem na zona recortada (setor de 120) do crculo se somam algebricamente
( possvel igualmente em mm de comprimento dos vetores).
=
=
120
0
) (
mb
R
7. A soma obtida se coloca na escala utilizada m
n
sobre o raio I a partir da circunferncia em direo
ao centro.
[ ] mm R m H
mb n
=
=
=
120
0
) ( 1
8.Com a mesma escala m
n
se repete a operao explicada, para cada um dos 12 raios que divide a
circunferncia do mancal.
Filiada :
62
Cinemtica, dinmica e equilbrio
de motores
9. Unindo com uma curva uniforme os 12 pontos obtidos, como se mostra na Fig. 4-5, a zona raiada
do mancal representa seu desgaste terico relativo.
10. Pela bissetriz do setor menos carregado do mancal, se traa um raio que mostrar a direo mais
apropriada para a perfurao do orifcio de lubrificao do mancal de biela.
4.9 Equilibrado do motor
Ao cumprir esta etapa do Projeto necessrio:
1. Analisar o equilibrado do motor projetado, mostrando as foras e momentos no equilibrados.
2. Sobre a base dos dados de clculo dinmico realizar uma valorao tentativa de magnitude das foras e
momentos desbalanceados (a separao entre os cilindros l
u
, se toma aproximadamente igual; l
u
=1,3
D).
3. Desenvolver o esquema principal de equilibrado de todas as foras e momentos desbalanceados (sem
prvio estudo construtivo profundo).
4. Estudar profundamente o esquema de diminuio da carga atuante sobre os apoios principais originada
pela ao da fora centrfuga das massas em rotao.
Exemplo: Motor de 4 tempos com disposio linear dos cilindros (Fig. 4-6).
Filiada :
63
Cinemtica, dinmica e equilbrio
de motores
4.9.1. Anlise do equilibrado
-Fora centrfuga resultante gerada pelas massas em movimento rotatrio
0
1
) (
=
=
i
k
K
R
F
Filiada :
64
Cinemtica, dinmica e equilbrio
de motores
0
) 4 ( ) 3 ( ) 2 ( ) 1 (
= + + +
F F F F R R R R
- Momento resultante das foras centrfugas das massas em rotao. Os momentos esto referidos ao
centro geomtrico do virabrequim, por isso:
=
=
i
k
K
R
M
1
) (
0 quando
M M M M R R R R
e
) 3 ( ) 2 ( ) 4 ( ) 1 (
= =
- Fora de inrcia sumaria de primeira ordem das massas recprocas.
0
1
) (
=
=
i
k
k
jI
P
quando
cos
2 ) 4 ( ) 1 (
= =
rw m P P j jI jI
cos ) 180 cos(
2 2 ) 3 ( ) 2 (
= + = =
rw m rw m P P j j jI jI
- Momento resultante das foras de inrcia de primeira ordem.
0
1
) (
=
=
i
k
k
jI M
quando
M M jI jI
) 4 ( ) 1 (
=
e
M M jI jI
) 3 ( ) 2 (
=
-Fora de inrcia sumaria de segunda ordem das massas em movimento linear alternativo.
2 cos 4
2 ) (
=
rw m P j
k
jII
quando
( ) ( )
2 cos
2 4 1
= = rw m P P
j jII jII
e
( ) ( )
2 cos ) 180 ( 2 cos
2 2 3 2
= + = = rw m rw m P P
j
o
j jII jII
-Momento sumario das foras de inrcia de segunda ordem das massas recprocas.
0
1
) (
=
=
i
k
k
jII M
quando
M M jII jII
) 4 ( ) 1 (
=
e
M M jII jII
) 3 ( ) 2 (
=
4.9.2 Calculo das foras desbalanceadas de segunda ordem das massas recprocas.
O valor mximo das foras desbalanceadas vem dado por:
[ ] N
rw m P j
i
k
k
jII
2
. max
1
) (
4 =
=
onde
Filiada :
65
Cinemtica, dinmica e equilbrio
de motores
( ) ] [
' '
Kg A
F m m m p b p j
+ = (ver clculo dinmico)
Fp
rea de pisto[ ] m
4.9.3 Esquema principal do equilibrado da fora sumaria de inrcia das massas em movimento linear
alternativo
Para o equilbrio externo da fora sumaria de inrcia de segunda ordem, que neste caso particular fica
livre, se pode utilizar o mecanismo representado na Fig. 4-6c. Este mecanismo consiste em um sistema de
engrenagens, dois dos quais de massa
mcp
se dispem em rotao oposta a uma velocidade angular igual,
porem, de sentido contrario, e cujo valor duas vezes maior que a do virabrequim. O centro de massa dos
contrapesos se encontram a uma distancia
II
de seu eixo de rotao.
Da condio de equilibrado se tem:
2
cp
j cp
r
m m
=
de forma que
P P cpII
i
k
k
jII 2
. max
1
) (
=
=
;
( )
2 2
2
2 4
w
II
cp j m rw m
=
.
4.9.4 Esquema de descarga dos apoios principais para reduzir os efeitos da fora centrfuga das massas em
rotao.
Sobre cada manivela atua uma fora centrfuga desbalanceada
rw m F R R
2
=
onde
mR
- massa das partes desbalanceadas da manivela e a biela concentrada no eixo do mancal de biela.
Como se viu na anlise do equilibrado, o virabrequim deste motor esta balanceado, ou seja:
( )
0
1
=
=
i
k
K
R
F e
( )
0
1
=
=
i
k
K
R
M
A pesar disso, baixo da ao destas foras, na estrutura do virabrequim aparecem tenses fletoras e seus
apoios principais experimentam cargas adicionais. por isso necessrio proceder ao equilibrado interno
das foras que provocam as referidas cargas.
No motor analisado o terceiro mancal de apoio quem experimenta a maior carga devido ao das
foras centrfugas. A carga total sobre a aplicada igual a F
R
.
Filiada :
66
Cinemtica, dinmica e equilbrio
de motores
Para a descarga deste mancal se colocam nas manivelas adjacentes dos contrapesos de massa M e cujo
centro de gravidade se encontra com relao ao eixo de giro do virabrequim, a uma distancia .
Da condio de equilbrio se tem:
F F M R
2 = ;
2 2
2 w M rw
mR
=
de onde
2
r
m M
k
=
m m m b H k
A) 1 ( + =
p H H
F m m
'
= e
p b b
F m m
'
=
onde
'
H
m e
'
b
m se encontram na tabela 4-1
Os mancais 2 e 4 no esto carregados pelas foras centrfugas.
A carga sobre o ler. e 5to. mancal devido a fora centrfuga, igual a 0,5 F
R
, seu equilibrado se realiza a
colocao dos contrapesos de massa M nas manivelas adjacentes e com seu centro de gravidade situado a
ma distancia do eixo de giro. Da condio de equilbrio
0,5
F F M R
= , se tem que
2
r
M
mR
=
Exemplo de um motor com equilibrado natural (motor de 6 cilindros e 4 tempos).
Neste tipo de motor se pode recomendar os seguintes esquemas para descarregar os mancais de apoio do
virabrequim (Fig. 4-7).
Filiada :
67
Cinemtica, dinmica e equilbrio
de motores
De acordo com os clculos obtidos o maior momento interno para o eixo sem contrapeso deve provocar
uma fora
F
M
F R
R
cp
l
l F
a
69 , 0
5 , 2
732 , 1
4 3
=
= =
Normalmente os contrapesos no permitem utilizar massas to grandes, por esta razo, no caso analisado
para ambos os sistemas (I e II) se considerou a utilizao de contrapesos que provoquem
F F R cp
= 5 , 0
O resultado da descarga dos apoios se mostra na Tabela 4-7.
Tabela 4-7
Carga da bronzina (p. de apoio)
Bronzina
Sem contrapeso Sistema I Sistema II
0-1, 0-6 0,5
FR
0,25
FR
0,375
FR
1-2 0,5
FR
0,4
FR
0,312
FR
2-3 0,5
FR
0,4
FR
0,312
FR
3-4
FR
0,5
FR
0,25
FR
4-5 0,5
FR
0,4
FR
0,312
FR
5-6 0,5
FR
0,4
FR
0,312
FR
Dos resultados obtidos sobre as cargas e momentos resultantes internos, se pode afirmar que a utilizao
de 4 contrapesos, segundo o sistema I assegura uma diminuio da carga na bronzina central
aproximadamente de uns 50% e do momento fletor mximo em uns 72%.
O mximo deste momento igual a l
F M R
= 5 , 0
max
(o que representa -29% do
M f max
) e se desloca
aos centros das bronzinas 2-3 e 4-5.
Em caso de utilizar 6 contratempos, segundo o sistemaII, asseguramos uma reduo da carga na bronzina
central de aproximadamente uns 75% e do momento fletor mxima em uns 62,5 % aplicado agora nas
bronzinas 2-3 e 4-5 o momento M
II Max
=0,77F
R
l (o que representa um 40,5% do M
I max
).
Filiada :
68
Cinemtica, dinmica e equilbrio
de motores
Nos motores de trao mais racional o sistemaI, j que o fundamental a carga sobre o corpo do motor
na qual, desta forma, se submete a menor deformao (menor desgaste dos elementos do sistema biela
manivela) e se podem construir as peas mais ligeiras.
O segundo sistema se utiliza nos motores estacionrios onde o motor se instala em uma base rgida, a qual
aumenta a rigidez do corpo do motor, sendo a principal funo dos contrapesos aumentar a durabilidade
da bronzina reduzindo as suas cargas.
Por isso, ao escolher o esquema de descarga do virabrequim se recomenda priorizar construes que
utilizem a menor quantidade de contrapesos. Em caso contrario se aumentaria o peso do motor e se
reduziria a freqncia natural de vibraes do virabrequim, a qual pode provocar vibraes tores
crticas.
Vous aimerez peut-être aussi
- Movimento em duas e três dimensões: vetor posição, vetor velocidade e vetor aceleraçãoDocument27 pagesMovimento em duas e três dimensões: vetor posição, vetor velocidade e vetor aceleraçãoLuis SoaresPas encore d'évaluation
- Trabalho Pronto Fenômenos Dos TransportesDocument10 pagesTrabalho Pronto Fenômenos Dos TransportesRafaela AndradePas encore d'évaluation
- Projeto de mecanismos Grashof de quatro barras com retorno rápido e acoplador em três posiçõesDocument21 pagesProjeto de mecanismos Grashof de quatro barras com retorno rápido e acoplador em três posiçõesVICTOR AUGUSTO SOARES NEGRIPas encore d'évaluation
- Polarização Da LuzDocument13 pagesPolarização Da LuzGervasio GuedesPas encore d'évaluation
- Lista TQMDocument2 pagesLista TQMGerson GersonPas encore d'évaluation
- 3.4 O Princípio Da Equipartição de Energia e A Capacidade Calorífica MolarDocument8 pages3.4 O Princípio Da Equipartição de Energia e A Capacidade Calorífica MolarPauloCézarPas encore d'évaluation
- Esferas e Espelhos: Propriedades ÓpticasDocument4 pagesEsferas e Espelhos: Propriedades ÓpticasLais GermanoPas encore d'évaluation
- Introdução Mecânica Dos Fluidos PDFDocument42 pagesIntrodução Mecânica Dos Fluidos PDFAnna DotsonPas encore d'évaluation
- Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter PDFDocument6 pagesModelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter PDFWilson AlvesPas encore d'évaluation
- UNED SERRA Instrumentação Módulo VazãoDocument49 pagesUNED SERRA Instrumentação Módulo VazãoppatrickkkPas encore d'évaluation
- Paulo Flores e JCPC - Cinemática de Mecanismos Cap 3Document25 pagesPaulo Flores e JCPC - Cinemática de Mecanismos Cap 3Antonio Henrique MPas encore d'évaluation
- Fatorações de polinômios e resolução de problemas matemáticosDocument13 pagesFatorações de polinômios e resolução de problemas matemáticosVinicius FigueiredoPas encore d'évaluation
- Relatório Uerj - Teste de Solubilidade e MiscibilidadeDocument5 pagesRelatório Uerj - Teste de Solubilidade e MiscibilidadeMarco AurélioPas encore d'évaluation
- Relatório de Física Experimental sobre Movimento Retilíneo Uniforme (MRUDocument7 pagesRelatório de Física Experimental sobre Movimento Retilíneo Uniforme (MRUMarcelo Vitor F. DiasPas encore d'évaluation
- Cap 33 - Natureza e Propagação Da LuzDocument6 pagesCap 33 - Natureza e Propagação Da Luzbm1auPas encore d'évaluation
- Movimentos de Rotação e TranslaçãoDocument9 pagesMovimentos de Rotação e Translaçãolp4.ambientalPas encore d'évaluation
- Lista de Exercícios AerodinâmicaDocument3 pagesLista de Exercícios Aerodinâmicappozzobon100% (1)
- Relatório Perdas de CargaDocument7 pagesRelatório Perdas de CargaAnderson Barros de MedeirosPas encore d'évaluation
- Trabalho de FisicaDocument18 pagesTrabalho de FisicaJose Antonio MarcosPas encore d'évaluation
- Gerador de Van der Graaff: Potencial elétrico e carga acumuladaDocument2 pagesGerador de Van der Graaff: Potencial elétrico e carga acumuladaCesar LoureiroPas encore d'évaluation
- Prova de Física 1965Document73 pagesProva de Física 1965Pedro MoradilloPas encore d'évaluation
- Gabarito Prova de Cálculo I - Engenharia Industrial Madeireira - UFPRDocument4 pagesGabarito Prova de Cálculo I - Engenharia Industrial Madeireira - UFPRGuilherme Augusto PianezzerPas encore d'évaluation
- Apostila - Bagnato Fisica Moderna PDFDocument376 pagesApostila - Bagnato Fisica Moderna PDFRafael GarciaPas encore d'évaluation
- Prática 6 - Princípio de Arquimedes e DensimetriaDocument13 pagesPrática 6 - Princípio de Arquimedes e DensimetriaMarcio Antônio Costa100% (1)
- PTV - Cálculo de DeslocamentosDocument28 pagesPTV - Cálculo de DeslocamentosEda Gabriela RoiaPas encore d'évaluation
- Portfólio 1 Aula 1 Tópicos de Física Moderna PDFDocument7 pagesPortfólio 1 Aula 1 Tópicos de Física Moderna PDFSamuel PereiraPas encore d'évaluation
- ED 8 PeriodoDocument21 pagesED 8 PeriodoThonny ColavinPas encore d'évaluation
- Primeira Lista de Exercícios - Mecânica GeralDocument5 pagesPrimeira Lista de Exercícios - Mecânica GeralFrancisco JúniorPas encore d'évaluation
- Cálculo Numérico - Lista N°2 com problemas de integrais, derivadas numéricas e interpolaçãoDocument3 pagesCálculo Numérico - Lista N°2 com problemas de integrais, derivadas numéricas e interpolaçãoHendrick ZaratePas encore d'évaluation
- Funções trigonométricas no contexto de problemasDocument2 pagesFunções trigonométricas no contexto de problemasElvis Donizeti NevesPas encore d'évaluation
- Fenômenos Mecânicos II - Lista de exercíciosDocument6 pagesFenômenos Mecânicos II - Lista de exercíciosanon_972394615Pas encore d'évaluation
- Cien CIA de Materia IsDocument25 pagesCien CIA de Materia IsDiogoMahou100% (1)
- Gazeta 30 02Document56 pagesGazeta 30 02amlferreira100% (1)
- Forças e acelerações em objetos em movimentoDocument3 pagesForças e acelerações em objetos em movimentoGabrielWR100% (1)
- Lista de Exercício Física Geral II 2022 - 2023Document12 pagesLista de Exercício Física Geral II 2022 - 2023Délcio ErivaldoPas encore d'évaluation
- Estruturas e Resistência dos MateriaisDocument93 pagesEstruturas e Resistência dos MateriaisvandoPas encore d'évaluation
- Estudo de Cinemática Utilizando Colchão de ArDocument12 pagesEstudo de Cinemática Utilizando Colchão de ArFernando MartinsPas encore d'évaluation
- Eletricidade e MagnetismoDocument5 pagesEletricidade e MagnetismoFellipe SilvaPas encore d'évaluation
- Física das Ondas e OscilaçõesDocument4 pagesFísica das Ondas e OscilaçõesDiêgo MarcosPas encore d'évaluation
- Estudo da relação entre volume e altura de líquido em tubo de vidroDocument4 pagesEstudo da relação entre volume e altura de líquido em tubo de vidrobraviross_418157489Pas encore d'évaluation
- Força e EquilíbrioDocument8 pagesForça e EquilíbrioAlexandre PrudencioPas encore d'évaluation
- Exercícios 06Document13 pagesExercícios 06Jhonatan SandriniPas encore d'évaluation
- 2º Relatório - ViscosidadeDocument14 pages2º Relatório - ViscosidadeCamila VidalPas encore d'évaluation
- Questionário TécnicoDocument8 pagesQuestionário TécnicoLucas SantosPas encore d'évaluation
- Aps2ForçasTreliçasDocument12 pagesAps2ForçasTreliçasRodrigo DaherPas encore d'évaluation
- Leis de NewtonDocument29 pagesLeis de NewtonFernanda SalesPas encore d'évaluation
- Algebra Matricial PDFDocument74 pagesAlgebra Matricial PDFdanielPas encore d'évaluation
- Notação VetorialDocument45 pagesNotação VetorialCecilia Mageski M SantosPas encore d'évaluation
- Questionario de ReologiaDocument4 pagesQuestionario de ReologiaNei Rodrigues de FreitasPas encore d'évaluation
- Física - UFC - Aula 06 ExercíciosDocument5 pagesFísica - UFC - Aula 06 ExercíciosFísica Caderno de Resoluções100% (1)
- Questões EletricidadeDocument9 pagesQuestões EletricidadeJohnnyOliveiraPinheiroPas encore d'évaluation
- Relatório I - Eletrização Por Atrito - Passei DiretoDocument4 pagesRelatório I - Eletrização Por Atrito - Passei DiretoWilliam Riukstein (LATAM)Pas encore d'évaluation
- Cinemática motores 40Document68 pagesCinemática motores 40Reginaldo LemosPas encore d'évaluation
- Cinemática e Dinâmica Dos MCIDocument49 pagesCinemática e Dinâmica Dos MCISimão PintoPas encore d'évaluation
- Física1 11Document7 pagesFísica1 11Thiago SoaresPas encore d'évaluation
- Dinâmica - MotoresDocument17 pagesDinâmica - MotoresLeandro Rodrigues P SantosPas encore d'évaluation
- Exercícios Da MEC1804Document19 pagesExercícios Da MEC1804MATHEUS SOUZAPas encore d'évaluation
- Problemas Sobre Mecanismos em 2023.1Document37 pagesProblemas Sobre Mecanismos em 2023.1Wertson ResendePas encore d'évaluation
- Movimento harmônico do garfo escocêsDocument15 pagesMovimento harmônico do garfo escocêsRonaldo Silveira JuniorPas encore d'évaluation
- Cinemática Inversa Robô 6GDLDocument13 pagesCinemática Inversa Robô 6GDLIvan BarretoPas encore d'évaluation
- Gravitação: A Força Fundamental do UniversoDocument28 pagesGravitação: A Força Fundamental do UniversoAdmilson SilvaPas encore d'évaluation
- AGMA 6001 (1997) - Redutores Design - En.ptDocument88 pagesAGMA 6001 (1997) - Redutores Design - En.ptGleisy CoserPas encore d'évaluation
- Estudo Dirigido - EletrostáticaDocument2 pagesEstudo Dirigido - EletrostáticaEllen Marta100% (2)
- Quim.1 - Cap.4.3 - Os Estados Energéticos Dos ElétronsDocument6 pagesQuim.1 - Cap.4.3 - Os Estados Energéticos Dos Elétronsibag_27Pas encore d'évaluation
- Juntas Universais e Eixo Cardan IMETEXDocument13 pagesJuntas Universais e Eixo Cardan IMETEXAlison NascimentoPas encore d'évaluation
- Aula05 PerdasDocument25 pagesAula05 PerdasDanilsonCabralPas encore d'évaluation
- Exercícios de velocidade, aceleração e movimentoDocument2 pagesExercícios de velocidade, aceleração e movimentoFrancisco Seabra100% (1)
- Problemas 1 2 e 3 MecanicaDocument18 pagesProblemas 1 2 e 3 MecanicaBruno ReisPas encore d'évaluation
- Carrijo Gustavo Nazareno Dos AnjosDocument65 pagesCarrijo Gustavo Nazareno Dos AnjosCesar ManPas encore d'évaluation
- Lista de GasesDocument5 pagesLista de Gasesforte2014Pas encore d'évaluation
- III Lista de Exercícios FQ GeralDocument2 pagesIII Lista de Exercícios FQ GeralMaria BotterPas encore d'évaluation
- Raio Critico de Um IsolanteDocument12 pagesRaio Critico de Um IsolanteSara Matias CoelhoPas encore d'évaluation
- Aula 3 30.09.2021.2 Exerc - uem.RES - Sala.ensaios. Exercícios Resolvidos e Propostos.Document8 pagesAula 3 30.09.2021.2 Exerc - uem.RES - Sala.ensaios. Exercícios Resolvidos e Propostos.Ana Beatriz Silva AtaidePas encore d'évaluation
- MRU e MRUV: Relatório de experimento sobre movimentos retilíneos uniforme e uniformemente variadoDocument15 pagesMRU e MRUV: Relatório de experimento sobre movimentos retilíneos uniforme e uniformemente variadoJuliana CarmoPas encore d'évaluation
- Lab3 Teoria de CircuitosDocument9 pagesLab3 Teoria de CircuitosOrcidioPas encore d'évaluation
- Aula 3 para DanielDocument54 pagesAula 3 para DanielvnevesPas encore d'évaluation
- RelatórioDocument4 pagesRelatórioLeonardo BragaPas encore d'évaluation
- Caixa 9S PDFDocument83 pagesCaixa 9S PDFWellington Pereira Josafa100% (5)
- UFABC Materiais PropriedadesDocument4 pagesUFABC Materiais PropriedadesGuilherme ToledoPas encore d'évaluation
- Dimensionamento de vigas de aço em flexãoDocument11 pagesDimensionamento de vigas de aço em flexãoRafael OliveiraPas encore d'évaluation
- Noções fundamentais dos MovimentosDocument5 pagesNoções fundamentais dos Movimentoslucio langaPas encore d'évaluation
- Evaluacion de Decantacion Lamelar PDFDocument116 pagesEvaluacion de Decantacion Lamelar PDFJaime Olazo MolloPas encore d'évaluation
- Lançamento de Projétil: MRU e MRUVDocument7 pagesLançamento de Projétil: MRU e MRUVsouza860% (1)
- Curso Engenharia Mecânica – Lista Avaliação Sistemas FluidotérmicosDocument13 pagesCurso Engenharia Mecânica – Lista Avaliação Sistemas FluidotérmicostulioPas encore d'évaluation
- O início do basquete e a equação horáriaDocument84 pagesO início do basquete e a equação horáriaGerson PompeuPas encore d'évaluation
- Biomecânica para Fisioterapeutas - 69pDocument69 pagesBiomecânica para Fisioterapeutas - 69pivanfersantosPas encore d'évaluation
- 9M4 - Tipos de MovimentosDocument11 pages9M4 - Tipos de MovimentosSandra SimoesPas encore d'évaluation
- Turbulencia Silva FreireDocument281 pagesTurbulencia Silva FreireAllanPas encore d'évaluation
- Conformação Plástica dos Metais: Deformação e TensõesDocument163 pagesConformação Plástica dos Metais: Deformação e TensõesJadiel OliveiraPas encore d'évaluation