Vous aimerez peut-être aussi
- CAN FD ElektronikAutomotive 201304 PressArticle enDocument4 pagesCAN FD ElektronikAutomotive 201304 PressArticle enHuang XiaodianPas encore d'évaluation
- NI Tutorial 2732 enDocument5 pagesNI Tutorial 2732 enmanumanu12Pas encore d'évaluation
- CAN Hardware DtailsDocument21 pagesCAN Hardware DtailsratheeshbrPas encore d'évaluation
- Advanced PointerDocument11 pagesAdvanced PointerStoriesofsuperheroesPas encore d'évaluation
- STM32 Eeprom PDFDocument16 pagesSTM32 Eeprom PDFAnonymous jqYVnpnAfQPas encore d'évaluation
- An-IDG-1-010 How To Create UDS Protocol ServicesDocument8 pagesAn-IDG-1-010 How To Create UDS Protocol Servicestotor42Pas encore d'évaluation
- Read Write SRS MCU CAN Eng PDFDocument13 pagesRead Write SRS MCU CAN Eng PDFFlorin MoneaPas encore d'évaluation
- R01an0239ej sh7125Document35 pagesR01an0239ej sh7125ArmanPas encore d'évaluation
- An Overview of Controller Area Network (CAN) Technology: November 12, 2003Document20 pagesAn Overview of Controller Area Network (CAN) Technology: November 12, 2003Dilyan MarinoffPas encore d'évaluation
- An001-Driving Inmp001 LCDDocument14 pagesAn001-Driving Inmp001 LCDnajiPas encore d'évaluation
- Ford's Diagnostic Development ProcessDocument24 pagesFord's Diagnostic Development ProcessGraciella Valeria Viana100% (1)
- Compiler (Very Imp.)Document10 pagesCompiler (Very Imp.)Saleh TarekPas encore d'évaluation
- CANBUS InfoDocument19 pagesCANBUS InfoBenito Camela100% (1)
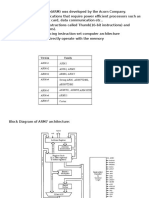
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarPas encore d'évaluation
- Canalyzer: Installation & Quick Start GuideDocument84 pagesCanalyzer: Installation & Quick Start GuideNitish Chiniwar100% (2)
- FCA Engine Mangement Operation and DiagDocument272 pagesFCA Engine Mangement Operation and DiagCristobal MedinaPas encore d'évaluation
- I2c Driver ArchitectureDocument12 pagesI2c Driver ArchitectureAkhilesh ChaudhryPas encore d'évaluation
- DESIGNING ISO 26262 COMPLIANT PCBsDocument6 pagesDESIGNING ISO 26262 COMPLIANT PCBsTj MusharafPas encore d'évaluation
- Banner To Micrologix PDFDocument19 pagesBanner To Micrologix PDFJosue PeñaPas encore d'évaluation
- PCI6154 Data BookDocument109 pagesPCI6154 Data BookSteven YangPas encore d'évaluation
- Max9924 Max9927Document23 pagesMax9924 Max9927someone elsePas encore d'évaluation
- Fre07e0 RTPDocument1 327 pagesFre07e0 RTPRashmi R100% (2)
- CAPL tips for advanced usersDocument4 pagesCAPL tips for advanced usersMohammad FaizanPas encore d'évaluation
- LPC2148 ARM7 MicrocontrollerDocument80 pagesLPC2148 ARM7 MicrocontrollerChhaya Sharma100% (3)
- Serialflash PDFDocument39 pagesSerialflash PDFManoj Kumar MauryaPas encore d'évaluation
- Flexray Module Training: Ti Safety MicrocontrollerDocument61 pagesFlexray Module Training: Ti Safety MicrocontrollerGuilherme PfeilstickerPas encore d'évaluation
- Write The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViDocument6 pagesWrite The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViashokPas encore d'évaluation
- Motor-Grader Maintenance Presentation: Tips for Operation, Grading Techniques & Road ShapeDocument30 pagesMotor-Grader Maintenance Presentation: Tips for Operation, Grading Techniques & Road ShapeAhmed Abdelghany100% (1)
- CAN ProtocolDocument9 pagesCAN Protocolhaythem.mejri.proPas encore d'évaluation
- Epson Stepper em 546Document12 pagesEpson Stepper em 546gui98710% (2)
- Sae j1962 1995 PDFDocument8 pagesSae j1962 1995 PDFmiguelcastilloPas encore d'évaluation
- 07-006 Voltage Drop TestDocument6 pages07-006 Voltage Drop TestVictor MontesdeocaPas encore d'évaluation
- AUTOSAR SWS DiagnosticCommunicationManager PDFDocument553 pagesAUTOSAR SWS DiagnosticCommunicationManager PDFyuvarajnarayanasamyPas encore d'évaluation
- Vector XCP Basics enDocument3 pagesVector XCP Basics enthoroftedalPas encore d'évaluation
- Maxim Integrated - AutomotiveDocument32 pagesMaxim Integrated - AutomotivepHysiXPas encore d'évaluation
- Contents CAN Projects With ARM and ArduinoDocument8 pagesContents CAN Projects With ARM and Arduinofenix1233Pas encore d'évaluation
- Can FD SpecDocument34 pagesCan FD SpecPreetham BaskaranPas encore d'évaluation
- Beginning Stm32: Developing With Freertos, Libopencm3 and GCCDocument18 pagesBeginning Stm32: Developing With Freertos, Libopencm3 and GCCdao trong nghiaPas encore d'évaluation
- LIN-Spec Pac2 1 PDFDocument191 pagesLIN-Spec Pac2 1 PDFveereshascribdPas encore d'évaluation
- CANalyzer - Canopen DataSheet enDocument4 pagesCANalyzer - Canopen DataSheet enFerdinand VelokurckiPas encore d'évaluation
- KWP 2 KProtocolDocument13 pagesKWP 2 KProtocolmacorcheroPas encore d'évaluation
- PWM Atmega328Document30 pagesPWM Atmega328JUNIOR700Pas encore d'évaluation
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set ArchitecturebalaPas encore d'évaluation
- DatasheetDocument50 pagesDatasheetLuis BarbosaPas encore d'évaluation
- FID 319: Continental GPEC2 MPC5566 3MB CAN BSLDocument3 pagesFID 319: Continental GPEC2 MPC5566 3MB CAN BSLAndrei UntuPas encore d'évaluation
- LSTM-based Intrusion Detection System for In-Vehicle CAN Bus CommunicationsDocument15 pagesLSTM-based Intrusion Detection System for In-Vehicle CAN Bus CommunicationsPaul100% (1)
- Coding GuidelinesDocument38 pagesCoding GuidelinesEngr NasirKhanPas encore d'évaluation
- PWM Based DC Motor Speed Control Using MicrocontrollerDocument8 pagesPWM Based DC Motor Speed Control Using MicrocontrollertazebPas encore d'évaluation
- Microcomputer (MCLS)Document44 pagesMicrocomputer (MCLS)TanPas encore d'évaluation
- Getting Started With Autosar - Rev June 25 2019 PDFDocument319 pagesGetting Started With Autosar - Rev June 25 2019 PDFkakathiPas encore d'évaluation
- Manual InnoSetupDocument30 pagesManual InnoSetupEusebio QaPas encore d'évaluation
- Atmel 8390 WIRELESS AVR2054 Serial Bootloader User Guide Application NoteDocument23 pagesAtmel 8390 WIRELESS AVR2054 Serial Bootloader User Guide Application NoteDorel Contrra100% (1)
- Abrites Diagnostics Manual OptimizedDocument20 pagesAbrites Diagnostics Manual OptimizedSergio GarciaPas encore d'évaluation
- Vehicle Network Toolbox™ User's Guide PDFDocument366 pagesVehicle Network Toolbox™ User's Guide PDFVictor Colpo NavarretePas encore d'évaluation
- Openvms ClusterDocument354 pagesOpenvms ClusterjsatheeshkannanPas encore d'évaluation
- Lane Change Assist: Self-Study Programme 396Document24 pagesLane Change Assist: Self-Study Programme 396HarryPas encore d'évaluation
- VW Transport Protocol 2.0 (TP 2.0) For CAN BusDocument8 pagesVW Transport Protocol 2.0 (TP 2.0) For CAN Busulisse_Pas encore d'évaluation
- SystemC Primer 1 - 1Document79 pagesSystemC Primer 1 - 1Nguyễn Hữu TuyếnPas encore d'évaluation
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- Vor AdfDocument1 pageVor AdfErlendur PetersenPas encore d'évaluation
- Session 02 of 2020 (Dec) : Previous Year PapersDocument9 pagesSession 02 of 2020 (Dec) : Previous Year PapersTejaswi DattaPas encore d'évaluation
- EKCC-W Sequencing Controller 4PEN341705-1 Installation Manuals EnglishDocument16 pagesEKCC-W Sequencing Controller 4PEN341705-1 Installation Manuals EnglishNano SalamPas encore d'évaluation
- Manual Minicas 2Document12 pagesManual Minicas 2ecotexano100% (1)
- AC/DC MACHINERY CHAPTER COMPILATIONDocument42 pagesAC/DC MACHINERY CHAPTER COMPILATIONJohn A. CenizaPas encore d'évaluation
- Gerbang Logika DasarDocument30 pagesGerbang Logika DasarSoly Deo Glorya HutagalungPas encore d'évaluation
- Brand Audit Samsung PDFDocument24 pagesBrand Audit Samsung PDFJefry HopkinsPas encore d'évaluation
- Determining Abrasion Resistance of Inks and Coatings On Substrates Using Dry or Wet Abrasive MediumDocument3 pagesDetermining Abrasion Resistance of Inks and Coatings On Substrates Using Dry or Wet Abrasive MediumwerrtePas encore d'évaluation
- Butterfly Valve Product Range & Applications in 40 CharactersDocument22 pagesButterfly Valve Product Range & Applications in 40 Characterssunil bajpaiPas encore d'évaluation
- IBIS-Rover User Guide 1.0 PDFDocument90 pagesIBIS-Rover User Guide 1.0 PDFFranco Armando Salgado BazanPas encore d'évaluation
- Automatic Mains Failure Unit ControlDocument2 pagesAutomatic Mains Failure Unit ControlMostafa ShannaPas encore d'évaluation
- Alfa 147 - Parrot Unikacompatibility - PDFDocument9 pagesAlfa 147 - Parrot Unikacompatibility - PDFarnold7894Pas encore d'évaluation
- 11 Bragg Reflection Lattice ConstantsDocument6 pages11 Bragg Reflection Lattice ConstantsFelipe Ignacio Albornoz CastañedaPas encore d'évaluation
- Dso152 Digital Oscilloscope ManualDocument7 pagesDso152 Digital Oscilloscope ManualPatrick FitzgeraldPas encore d'évaluation
- Aumatic Control Unit: Aumund Fördertechnik GMBHDocument7 pagesAumatic Control Unit: Aumund Fördertechnik GMBHBruno SantosPas encore d'évaluation
- Camara Domo CNB LBM20SDocument1 pageCamara Domo CNB LBM20STecnoSmartPas encore d'évaluation
- SERVOSTAR 601... 620: Digital Servo Amplifier S600 Instructions ManualDocument120 pagesSERVOSTAR 601... 620: Digital Servo Amplifier S600 Instructions ManualRenato KristićPas encore d'évaluation
- Axiom Instrument Maps For LogicDocument14 pagesAxiom Instrument Maps For LogicNachinsky von FriedenPas encore d'évaluation
- HT640 DatasheetDocument13 pagesHT640 Datasheetmanojram18Pas encore d'évaluation
- Lab 8Document11 pagesLab 8Izham ZainalPas encore d'évaluation
- Important safety instructions for dishwashersDocument25 pagesImportant safety instructions for dishwashersYurakuYurakul100% (1)
- S103C E - Magnetici Flowmter CH608 ConverterDocument2 pagesS103C E - Magnetici Flowmter CH608 ConverterAdam SamyPas encore d'évaluation
- FLIR Product ChartDocument2 pagesFLIR Product ChartAnthonio MJPas encore d'évaluation
- 65° Panel Antenna: General SpecificationsDocument2 pages65° Panel Antenna: General SpecificationsMiroslav ZeljkovicPas encore d'évaluation
- Method Statement - Earthing & Lightning ProtectionDocument6 pagesMethod Statement - Earthing & Lightning ProtectionKhaled Badawy0% (1)
- Anderson's BridgeDocument2 pagesAnderson's BridgeRavi Kanth M NPas encore d'évaluation
- EE4605, "Integrated Circuits and Systems For Wireless Applications"Document15 pagesEE4605, "Integrated Circuits and Systems For Wireless Applications"debdutt13Pas encore d'évaluation
- Quantum With Unity Pro: 141 MMS 425 01, 141 MMS 535 02 SERCOS Multi-Axis Motion Controller User ManualDocument36 pagesQuantum With Unity Pro: 141 MMS 425 01, 141 MMS 535 02 SERCOS Multi-Axis Motion Controller User Manualrmorenodx4587Pas encore d'évaluation
- HuaFan PH3 Gas Detector and Controller Quotation To Phan Thanh Hoàng 2023101701Document1 pageHuaFan PH3 Gas Detector and Controller Quotation To Phan Thanh Hoàng 2023101701Huu BằngPas encore d'évaluation