Vous aimerez peut-être aussi
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCD'EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCPas encore d'évaluation
- Stm32f4 Hardware DevelopmentDocument43 pagesStm32f4 Hardware DevelopmentrevaPas encore d'évaluation
- KiCad Orientation V2Document41 pagesKiCad Orientation V2Sultangali ArzykulovPas encore d'évaluation
- PCB Design With KiCadDocument21 pagesPCB Design With KiCadSultangali ArzykulovPas encore d'évaluation
- Instrument Automation With Python by Keysight 5992-4268Document15 pagesInstrument Automation With Python by Keysight 5992-4268jigg1777Pas encore d'évaluation
- How To Create Macro Models in TINA-TIDocument80 pagesHow To Create Macro Models in TINA-TIjazbo8Pas encore d'évaluation
- L02 MSP430Document34 pagesL02 MSP430Srinivas VN100% (1)
- Machine Learning in Embedded SystemDocument56 pagesMachine Learning in Embedded SystemnhungdieubatchotPas encore d'évaluation
- Implementation of A Complete GPS Receiver Using SimulinkDocument9 pagesImplementation of A Complete GPS Receiver Using SimulinkvwnunlaiPas encore d'évaluation
- Zynq7000 Embedded Design TutorialDocument126 pagesZynq7000 Embedded Design TutorialRohini SeetharamPas encore d'évaluation
- C Programming On LinuxDocument18 pagesC Programming On LinuxRahi Jain100% (2)
- Embedded SW Development With ECosDocument35 pagesEmbedded SW Development With ECosRakesh MenonPas encore d'évaluation
- nRF52840 PS v1.5Document631 pagesnRF52840 PS v1.5Benyamin Farzaneh AghajariePas encore d'évaluation
- Advanced Debugging of STM32-Based DevicesDocument10 pagesAdvanced Debugging of STM32-Based DevicesSandoval DanielPas encore d'évaluation
- STM32 Training 12W06 1V0Document73 pagesSTM32 Training 12W06 1V0Oussama Riahi ChPas encore d'évaluation
- Booksim ManualDocument7 pagesBooksim Manualshahje5Pas encore d'évaluation
- COE538 Microprocessor Systems Lab 3: Battery and Bumper DisplaysDocument18 pagesCOE538 Microprocessor Systems Lab 3: Battery and Bumper Displaysalvin petinaPas encore d'évaluation
- Virtual WireDocument13 pagesVirtual WirePedro Nuno Sabugueiro OliveiraPas encore d'évaluation
- Verint S4100 Wireless Transmitter and Receiver - FactsheetDocument4 pagesVerint S4100 Wireless Transmitter and Receiver - FactsheetmododanPas encore d'évaluation
- Mms2401 - Multimedia Systems & Communications (3 Credits)Document21 pagesMms2401 - Multimedia Systems & Communications (3 Credits)Markmel Pujante LoberitaPas encore d'évaluation
- Fpga DSP WhitepaperDocument15 pagesFpga DSP Whitepaperzohair_r66Pas encore d'évaluation
- R05 411104ertsDocument8 pagesR05 411104ertsravitejakotiPas encore d'évaluation
- Exam Questions 2018Document3 pagesExam Questions 2018naveen g cPas encore d'évaluation
- Getting Startted With GNU Radio and USRPDocument6 pagesGetting Startted With GNU Radio and USRPAdeel AhmadPas encore d'évaluation
- ARM ArchitectureDocument547 pagesARM ArchitectureAmrita BhattPas encore d'évaluation
- Mixed Signal TestDocument14 pagesMixed Signal TestperiodoPas encore d'évaluation
- Titoe CNC 3018pro Router User GuideDocument10 pagesTitoe CNC 3018pro Router User GuideWesterlanderPas encore d'évaluation
- Stm32f4 LabsDocument430 pagesStm32f4 LabsBui Van Phat100% (4)
- Mbed IntroductionDocument6 pagesMbed IntroductionNaveed Anwar BhattiPas encore d'évaluation
- Decoding LoRaDocument8 pagesDecoding LoRaflorent_marcelliPas encore d'évaluation
- Embedded Linux RealtimeDocument76 pagesEmbedded Linux RealtimeLenon Raubach TuchtenhagenPas encore d'évaluation
- Embd Course Pamplet - 3 - 4monthsDocument2 pagesEmbd Course Pamplet - 3 - 4monthsThanigai Arasu RuthirakottiPas encore d'évaluation
- Msp430 ManualDocument582 pagesMsp430 ManualSilambarasan MadhaiyanPas encore d'évaluation
- GTK+ GUI Programming: Ori Idan Helicon TechnologiesDocument19 pagesGTK+ GUI Programming: Ori Idan Helicon TechnologiesSanjib Mishra MishraPas encore d'évaluation
- Analog Line FollowerDocument8 pagesAnalog Line FollowerRichard ArturoPas encore d'évaluation
- ArmpptDocument168 pagesArmpptamit_k25Pas encore d'évaluation
- ARM Introduction-1Document26 pagesARM Introduction-1040-NishanthPas encore d'évaluation
- Step by Step Procedure HFSSDocument23 pagesStep by Step Procedure HFSSNilabja SahaPas encore d'évaluation
- Chapter 1: Introduction To Psoc: From The Free Online Book "Architecture and Programming of Psoc Microcontrollers"Document34 pagesChapter 1: Introduction To Psoc: From The Free Online Book "Architecture and Programming of Psoc Microcontrollers"Joel George MathewPas encore d'évaluation
- Embedded Syllabus With C ClassDocument3 pagesEmbedded Syllabus With C ClassRakesh RakiPas encore d'évaluation
- Xenomai ImplementationDocument92 pagesXenomai ImplementationSyed Abrar AlviPas encore d'évaluation
- IVCAD MT930M1M2A OM HEMT ModelDocument65 pagesIVCAD MT930M1M2A OM HEMT ModellotfiPas encore d'évaluation
- 5.Eng-Peak Cancellation Crest Factor-VINAY REDDY NDocument10 pages5.Eng-Peak Cancellation Crest Factor-VINAY REDDY NImpact JournalsPas encore d'évaluation
- Introduction To 8085 MicroprocessorDocument35 pagesIntroduction To 8085 MicroprocessorCave BosPas encore d'évaluation
- Machine Vision For Line Detection With LabviewDocument10 pagesMachine Vision For Line Detection With LabviewThan Lwin AungPas encore d'évaluation
- CMake TutorialDocument34 pagesCMake TutorialVinod Karuvat100% (1)
- MMIC Getting StartedDocument108 pagesMMIC Getting StartedJohn MichelPas encore d'évaluation
- Learning FPGA and Verilog A Beginner's GuideDocument16 pagesLearning FPGA and Verilog A Beginner's GuideSaurabh Chandra MishraPas encore d'évaluation
- Empro Python Cookbook PDFDocument107 pagesEmpro Python Cookbook PDFGuillermo Ceos50% (2)
- Zynq EPP Boot Camp Lab WorkbookDocument199 pagesZynq EPP Boot Camp Lab WorkbookEswaran SamyPas encore d'évaluation
- Arduino - SPIDocument4 pagesArduino - SPIMuhammad Fikri100% (1)
- LAB Manual Mbed PDFDocument20 pagesLAB Manual Mbed PDFjjPas encore d'évaluation
- Ansi - Scte 104 2004Document137 pagesAnsi - Scte 104 2004Vojislav RadosavljevicPas encore d'évaluation
- Cookbook Formulae For Audio EQ Biquad Filter CoefficientsDocument5 pagesCookbook Formulae For Audio EQ Biquad Filter Coefficientsgotti45Pas encore d'évaluation
- 2014 - Finite State Machine Based Flow Analysis For WebRTC Applications PDFDocument6 pages2014 - Finite State Machine Based Flow Analysis For WebRTC Applications PDFasdsdPas encore d'évaluation
- 2014 - WebRTC Enabled Multimedia Conferencing and Collaboration Solution PDFDocument6 pages2014 - WebRTC Enabled Multimedia Conferencing and Collaboration Solution PDFasdsdPas encore d'évaluation
- Rectangular Waveguides Rectangular Waveguides Rectangular Waveguides G G G G G GDocument51 pagesRectangular Waveguides Rectangular Waveguides Rectangular Waveguides G G G G G GasdsdPas encore d'évaluation
- Filters 2Document36 pagesFilters 2asdsdPas encore d'évaluation
- Microwave Microwave Microwave Devices Devices Devices Power Power Power Splitters Splitters Splitters///combiners Combiners CombinersDocument31 pagesMicrowave Microwave Microwave Devices Devices Devices Power Power Power Splitters Splitters Splitters///combiners Combiners CombinersasdsdPas encore d'évaluation
- SL3Document35 pagesSL3asdsdPas encore d'évaluation
- Frequency Domain Analysis of Microwave DevicesDocument41 pagesFrequency Domain Analysis of Microwave DevicesasdsdPas encore d'évaluation
- Couplers and Hybrid Rings P y G: .Donelli@disi - Unitn.it .Donelli@disi - Unitn.itDocument75 pagesCouplers and Hybrid Rings P y G: .Donelli@disi - Unitn.it .Donelli@disi - Unitn.itasdsdPas encore d'évaluation
- SL5Document14 pagesSL5asdsdPas encore d'évaluation
- SL3Document35 pagesSL3asdsdPas encore d'évaluation
- Filters 3Document18 pagesFilters 3asdsdPas encore d'évaluation
- SL1Document10 pagesSL1asdsdPas encore d'évaluation
- SL1Document10 pagesSL1asdsdPas encore d'évaluation
- Rectangular Waveguides Rectangular Waveguides Rectangular Waveguides G G G G G GDocument51 pagesRectangular Waveguides Rectangular Waveguides Rectangular Waveguides G G G G G GasdsdPas encore d'évaluation
- Filters 1Document30 pagesFilters 1asdsdPas encore d'évaluation
- Filters 2Document36 pagesFilters 2asdsdPas encore d'évaluation
- EEE194 RF Microwave FiltersDocument13 pagesEEE194 RF Microwave FiltersNico PutterPas encore d'évaluation
- Filters 3Document18 pagesFilters 3asdsdPas encore d'évaluation
- Ees06 MSP430 GpioDocument20 pagesEes06 MSP430 GpioasdsdPas encore d'évaluation
- Ees04 CDocument47 pagesEes04 CasdsdPas encore d'évaluation
- OPTIC FIBERS: FUNDAMENTALDocument69 pagesOPTIC FIBERS: FUNDAMENTALasdsdPas encore d'évaluation
- EES13 - Energy Harvesting - WSNDocument90 pagesEES13 - Energy Harvesting - WSNasdsdPas encore d'évaluation
- CS1m Part3 2013 2014Document75 pagesCS1m Part3 2013 2014asdsdPas encore d'évaluation
- EES12 - Energy HarvestingDocument48 pagesEES12 - Energy HarvestingasdsdPas encore d'évaluation
- CS1m Part4 2013 2014Document60 pagesCS1m Part4 2013 2014asdsdPas encore d'évaluation
- CS1m Part1 2013 2014Document22 pagesCS1m Part1 2013 2014asdsdPas encore d'évaluation
- EES11 - Power ManagementDocument40 pagesEES11 - Power ManagementasdsdPas encore d'évaluation
- Exercises: CDMA: XerciseDocument4 pagesExercises: CDMA: XerciseasdsdPas encore d'évaluation
- Thermal Noise in Telecommunication SystemsDocument55 pagesThermal Noise in Telecommunication SystemsasdsdPas encore d'évaluation
- (Kay A. Robbins, Steve Robbins) UNIX Systems Progr PraticaDocument1 008 pages(Kay A. Robbins, Steve Robbins) UNIX Systems Progr Praticazecarneiro0% (1)
- Microprocessor 8085 ProgrammingDocument13 pagesMicroprocessor 8085 ProgrammingRajiv Shah0% (1)
- Introduction To Computer Programming: Unit IDocument33 pagesIntroduction To Computer Programming: Unit IKath VillanuevaPas encore d'évaluation
- A Project Report On Avr Micro Controller Development SystemDocument8 pagesA Project Report On Avr Micro Controller Development SystemGold KnowinPas encore d'évaluation
- Exploiting Intra Warp Parallelism For GPGPUDocument37 pagesExploiting Intra Warp Parallelism For GPGPUUmesh SinghPas encore d'évaluation
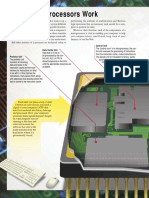
- How Microprocessors Work PDFDocument2 pagesHow Microprocessors Work PDFdanielconstantin4Pas encore d'évaluation
- Subject Content Clarification Guide A LevelDocument24 pagesSubject Content Clarification Guide A LevelKhan SaibPas encore d'évaluation
- 3.microelectronics History Tech DevDocument16 pages3.microelectronics History Tech DevJayvee ColiaoPas encore d'évaluation
- Mobile Sniffer Cum Jammer With Alerting SystemDocument77 pagesMobile Sniffer Cum Jammer With Alerting System9fela100% (1)
- Solution Manual Computer Organization and Architecture 9th Edition William Stallingsdoc PDF FreeDocument13 pagesSolution Manual Computer Organization and Architecture 9th Edition William Stallingsdoc PDF FreeTuấn Anh Bùi100% (1)
- System Software and LanguagesDocument55 pagesSystem Software and LanguagesAnurag GoelPas encore d'évaluation
- Meridian2021 R2 SR LTRDocument39 pagesMeridian2021 R2 SR LTREduardo RuizPas encore d'évaluation
- Assignment 1Document3 pagesAssignment 1Rupak ThakurPas encore d'évaluation
- 80386Document4 pages80386Peejay OllabracPas encore d'évaluation
- JSPM’s Rajarshi Shahu College of Engineering, Department of Electronics and Telecommunication Engineering Multiple Choice Questions on 8051 Microcontroller Interrupt ProgrammingDocument506 pagesJSPM’s Rajarshi Shahu College of Engineering, Department of Electronics and Telecommunication Engineering Multiple Choice Questions on 8051 Microcontroller Interrupt Programmingsadanand joriPas encore d'évaluation
- Hardware Recommendations For HadoopDocument12 pagesHardware Recommendations For HadoopTan ArmanPas encore d'évaluation
- A Basic Introduction To Neural NetworksDocument23 pagesA Basic Introduction To Neural NetworksDennis Ebenezer DhanarajPas encore d'évaluation
- Course Outline 2023 - AASTUDocument4 pagesCourse Outline 2023 - AASTUMelaku MehandisPas encore d'évaluation
- Data stage Architecture and Job TypesDocument4 pagesData stage Architecture and Job Typesabreddy2003Pas encore d'évaluation
- MIT Assignment (19CS20)Document34 pagesMIT Assignment (19CS20)Imran AliPas encore d'évaluation
- Lecture 5-6-7 HARMONYDocument76 pagesLecture 5-6-7 HARMONYAsif MahmoodPas encore d'évaluation
- BenchmarkDocument46 pagesBenchmarkAnirbanBhattacharjeePas encore d'évaluation
- Lanczos Method For Solution of Eigen ProblemDocument32 pagesLanczos Method For Solution of Eigen ProblemMohd RiyasatPas encore d'évaluation
- Introduction to Computer Organization & ArchitectureDocument65 pagesIntroduction to Computer Organization & ArchitectureDivy BhanushaliPas encore d'évaluation
- Garbage Collection PoliciesDocument71 pagesGarbage Collection PoliciesdsbrPas encore d'évaluation
- COF 111 Module-1Document49 pagesCOF 111 Module-1Eddie Angco TorremochaPas encore d'évaluation
- Cardserver Technical DocumentationDocument31 pagesCardserver Technical DocumentationBobbyPas encore d'évaluation
- Problem A: To Add or To MultiplyDocument22 pagesProblem A: To Add or To Multiplyapi-129484507Pas encore d'évaluation
- CS1601 Computer ArchitectureDocument389 pagesCS1601 Computer Architectureainugiri100% (1)
- A Comparison of Human and Computer Information ProcessingDocument14 pagesA Comparison of Human and Computer Information ProcessingMoses Bharath KumarPas encore d'évaluation