Académique Documents
Professionnel Documents
Culture Documents
Manual Tesys T
Transféré par
Ramiro UrivalTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Manual Tesys T
Transféré par
Ramiro UrivalDroits d'auteur :
Formats disponibles
1
6
3
9
5
0
5
www.schneider-electric.com
1639505 06/2009
TeSys
T LTM R Modbus
/TCP
Controlador de gestin de motores
Manual de usuario
06/2009
2 1639505 06/2009
Schneider Electric no asume ninguna responsabilidad ante los posibles errores que
aparezcan en este documento. Si tiene alguna sugerencia para llevar a cabo
mejoras o modificaciones o si ha encontrado errores en esta publicacin, le
rogamos que nos lo notifique.
Queda prohibido reproducir cualquier parte de este documento bajo ninguna forma
o medio posible, ya sea electrnico, mecnico o fotocopia, sin autorizacin previa
de Schneider Electric.
Debern tenerse en cuenta todas las normas de seguridad nacionales, regionales
y locales pertinentes a la hora de instalar y utilizar este producto. Por razones de
seguridad y para garantizar que se siguen los consejos de la documentacin del
sistema, las reparaciones slo podr realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos tcnicos de
seguridad, siga las instrucciones pertinentes.
Si no se utiliza el software de Schneider Electric o un software compatible con
nuestros productos de hardware, pueden sufrirse daos o lesiones o provocar un
funcionamiento inadecuado del dispositivo.
Si no se tiene en cuenta esta informacin se pueden causar daos personales o en
el equipo.
2009 Schneider Electric. Reservados todos los derechos.
1639505 06/2009 3
Tabla de materias
Informacin de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 11
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Captulo 1
Introduccin al sistema de gestin de motores TeSys
T. . . 15
Presentacin del sistema de gestin de motores TeSys
T. . . . . . . . . . . 16
Gua de seleccin del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Descripcin fsica del controlador LTM R con el protocolo Modbus
/TCP . . . . 28
Descripcin fsica del mdulo de expansin LTM E . . . . . . . . . . . . . . . . . 31
Captulo 2 Funciones de medicin y supervisin . . . . . . . . . . . . . . 33
2.1 Medicin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Corrientes de lnea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Corriente de tierra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Corriente media. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Desequilibrio de corrientes de fase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Nivel de capacidad trmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Sensor de temperatura del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Frecuencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Tensiones lnea a lnea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Desequilibrio de tensin de red. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Tensin media. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Factor de potencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Potencia activa y potencia reactiva. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Consumo de potencia activa y consumo de potencia reactiva . . . . . . . . . 51
2.2 Fallos de supervisin de sistemas y dispositivos . . . . . . . . . . . . . . . . . . . 52
Controlador-fallo interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Temperatura interna del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Diagnstico de errores de comandos de control . . . . . . . . . . . . . . . . . . . 56
Fallos de cableado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Suma de comprobacin de configuracin. . . . . . . . . . . . . . . . . . . . . . . . . 61
Prdida de comunicacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Tiempo hasta el disparo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Fallo y advertencia de configuracin de LTM E . . . . . . . . . . . . . . . . . . . . 66
Fallo externo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4 1639505 06/2009
2.3 Contadores de fallos y advertencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Introduccin a los contadores de fallos y advertencias . . . . . . . . . . . . . . 69
Todos los contadores de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Todos los contadores de advertencias . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Contador de rearme automtico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Contadores de fallos y advertencias de proteccin . . . . . . . . . . . . . . . . . 71
Contador de errores de comandos de control . . . . . . . . . . . . . . . . . . . . . 72
Contador de fallos de cableado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Contadores de prdida de comunicacin . . . . . . . . . . . . . . . . . . . . . . . . 73
Contadores de fallos internos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Historial de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.4 Historial del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Contadores de arranque del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Contador de arranques del motor por hora . . . . . . . . . . . . . . . . . . . . . . . 76
Contador de descargas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Contadores de rearranque automtico . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Motor-corriente del ltimo arranque. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Motor-duracin del ltimo arranque. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Tiempo de funcionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2.5 Estado de funcionamiento del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Estado del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Mnimo-tiempo de espera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Captulo 3 Funciones de proteccin del motor . . . . . . . . . . . . . . . . . 83
3.1 Introduccin a las funciones de proteccin del motor . . . . . . . . . . . . . . . 84
Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Caractersticas de proteccin del motor . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.2 Funciones de proteccin trmica y de corriente del motor . . . . . . . . . . . 90
Sobrecarga trmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Sobrecarga trmica - Trmica inversa. . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Sobrecarga trmica - Tiempo definido. . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Desequilibrio de corrientes de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Prdida de corriente de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Inversin de corrientes de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Arranque prolongado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Agarrotamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Infracorriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Sobrecorriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Corriente de tierra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Corriente de tierra interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Corriente de tierra externa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Sensor de temperatura del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Sensor de temperatura del motor - PTC binario . . . . . . . . . . . . . . . . . . . 131
1639505 06/2009 5
Motor-sensor de temperatura - PT100 . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Sensor de temperatura del motor - PTC analgico. . . . . . . . . . . . . . . . . . 136
Sensor de temperatura del motor - NTC analgico. . . . . . . . . . . . . . . . . . 139
Ciclo rpido-bloqueo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
3.3 Funciones de proteccin de la tensin del motor . . . . . . . . . . . . . . . . . . . 144
Desequilibrio de tensiones de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Prdida de tensin de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Inversin de tensin de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Infratensin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Sobretensin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Gestin de cadas de tensin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Descarga. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Rearranque automtico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
3.4 Funciones de proteccin de alimentacin del motor . . . . . . . . . . . . . . . . . 169
Potencia insuficiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Potencia excesiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Factor de potencia insuficiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Factor de potencia excesivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
Captulo 4 Funciones de control del motor . . . . . . . . . . . . . . . . . . . 183
4.1 Canales de control y estados de funcionamiento . . . . . . . . . . . . . . . . . . . 184
Canales de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Estados de funcionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
Ciclo de arranque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
4.2 Modos de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Principios de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
Modos de funcionamiento predefinidos. . . . . . . . . . . . . . . . . . . . . . . . . . . 201
Cableado de control y gestin de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Modo de funcionamiento de sobrecarga. . . . . . . . . . . . . . . . . . . . . . . . . . 207
Modo de funcionamiento independiente . . . . . . . . . . . . . . . . . . . . . . . . . . 210
Modo de funcionamiento de 2 sentidos de marcha. . . . . . . . . . . . . . . . . . 214
Modo de funcionamiento de dos tiempos . . . . . . . . . . . . . . . . . . . . . . . . . 218
Modo de funcionamiento de dos velocidades . . . . . . . . . . . . . . . . . . . . . . 224
Modo de funcionamiento personalizado . . . . . . . . . . . . . . . . . . . . . . . . . . 229
4.3 Gestin de fallos y comandos Borrar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
Introduccin a la gestin de fallos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
Rearme manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
Rearme automtico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
Rearme a distancia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
Cdigos de fallo y advertencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
Comandos Borrar del controlador LTM R . . . . . . . . . . . . . . . . . . . . . . . . . 247
Captulo 5 Instalacin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
5.1 Instalacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
Dimensiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
Montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
Montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
6 1639505 06/2009
Conexin a un dispositivo HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
Cableado: Principios generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
Cableado: Transformadores de corriente (CT) . . . . . . . . . . . . . . . . . . . . 274
Cableado: Transformadores de corriente de fallo a tierra . . . . . . . . . . . . 280
Cableado: Sensores de temperatura. . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
Contactores recomendados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
5.2
Cableado de la red de comunicacin Modbus
/TCP . . . . . . . . . . . . . . . 288
Caractersticas del terminal de cableado del puerto de red Modbus
/TCP . . . . 289
Conexin a la red Modbus
/TCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
Captulo 6 Puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Descripcin general de la puesta en marcha / Tratamiento de
fallos FDR no recuperables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Primer encendido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Parmetros necesarios y opcionales. . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
Configuracin de FLC (Corriente a plena carga) . . . . . . . . . . . . . . . . . . 306
Comprobacin de la comunicacin Modbus
/TCP . . . . . . . . . . . . . . . . . 309
Comprobacin del cableado del sistema. . . . . . . . . . . . . . . . . . . . . . . . . 312
Comprobacin de la configuracin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
Captulo 7 Uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317
7.1 Uso del controlador LTM R solamente . . . . . . . . . . . . . . . . . . . . . . . . . . 318
Configuraciones de hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
Configuracin independiente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
7.2 Uso de la unidad de operador de control LTM CU . . . . . . . . . . . . . . . . . 324
Presentacin de la unidad de operador de control LTM CU . . . . . . . . . . 325
Configuracin del puerto HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
7.3
Configurar el XBTN410 de Magelis
. . . . . . . . . . . . . . . . . . . . . . . . . . . 328
Instalar el software de programacin XBT L1000 de Magelis
. . . . . . . 329
Descargar archivos de la aplicacin de software de 1 a varios. . . . . . . . 330
Transferir los archivos de software de la aplicacin
al HMI XBTN410 de Magelis
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
7.4
Uso del HMI XBTN410 de Magelis
(1 a varios) . . . . . . . . . . . . . . . . . . . 332
Descripcin fsica (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Lneas de comandos (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
Desplazarse por la estructura de mens (1 a varios) . . . . . . . . . . . . . . . 339
Editar valores (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
Ejecutar un comando de escritura de valores (1 a varios). . . . . . . . . . . . 345
Estructura de mens (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
Estructura de mens: Pgina Inicio (1 a varios) . . . . . . . . . . . . . . . . . . . 348
Estructura de mens: Todos los controladores LTM R
y el HMI (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349
Pgina Controlador (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Ajustes (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
1639505 06/2009 7
Histricos (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
ID De Producto (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
Supervisin (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
Gestin de fallos (1 a varios). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
Comandos de servicio (1 a varios) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
7.5 Utilizar el software PowerSuite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
Instalacin de software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
Interfaz de usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
Gestin de archivos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Ajustes de direccin IP almacenada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
Direccionamiento IP maestra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
Modo de configuracin/Sustitucin de dispositivo defectuoso . . . . . . . . . 385
SNMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
Puerto HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389
Servicios que utilizan PowerSuite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
Medicin y supervisin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392
Gestin de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
Comandos Self Test y Clear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
7.6 Utilizar los servicios Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Gestin del enlace Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401
Direccionamiento IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
Sustitucin de dispositivo defectuoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411
Configuracin de la exploracin de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . 419
IP maestra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423
Actualizacin del firmware del puerto de red . . . . . . . . . . . . . . . . . . . . . . 425
Diagnstico Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426
Protocolo simple de administracin de red (SNMP) . . . . . . . . . . . . . . . . . 435
Utilizar la herramienta de diagnstico Ethernet ConneXview . . . . . . . . . . 438
7.7
Utilizar la red de comunicacin Modbus
/TCP. . . . . . . . . . . . . . . . . . . . . 441
Principio del protocolo Modbus
/TCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . 443
Configuracin de la comunicacin Ethernet del puerto de red . . . . . . . . . 446
Comandos Borrar de los parmetros de comunicacin . . . . . . . . . . . . . . 449
Control y supervisin simplificadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452
Solicitudes Modbus
/TCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453
Gestin de excepciones Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454
Variables de mapa de usuario (Registros indirectos definidos
por el usuario) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455
Mapa de registros (Organizacin de variables de comunicacin) . . . . . . 457
Formatos de los datos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459
Tipos de datos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461
Variables de identificacin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471
Variables histricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
Variables de supervisin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
Variables de configuracin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495
8 1639505 06/2009
Variables de comandos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
Variables de mapa de usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510
Variables de lgica personalizada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
Registros de mirroring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512
7.8 Utilizar la interfaz de usuario del servidor web estndar . . . . . . . . . . . . . 516
Descripcin de la interfaz de usuario del servidor web estndar. . . . . . . 517
Pgina Inicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523
Pgina Login . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525
Pgina Documentacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527
Pgina Visualizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528
Pgina Estado de producto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529
Pgina Medicin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531
Pgina Diagnstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533
Pgina Diagnstico Bsico Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535
Pgina Diagnstico Ampliado Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . 536
Pgina Fallos y advertencias. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
Pgina Resea histrica de los fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . 542
Pgina Mantenimiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544
Pgina Contador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
Pgina Configuracin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547
Pgina Configuracin trmica del producto. . . . . . . . . . . . . . . . . . . . . . . 549
Pgina Parmetros de corriente del producto . . . . . . . . . . . . . . . . . . . . . 551
Pgina Parmetros de tensin del producto . . . . . . . . . . . . . . . . . . . . . . 554
Pgina Parmetros de potencia del producto . . . . . . . . . . . . . . . . . . . . . 557
Pgina Contrasea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
Captulo 8 Mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561
Deteccin de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562
Solucin de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564
Mantenimiento preventivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567
Sustitucin de un controlador LTM R y un mdulo de expansin LTM E . . . . 571
Advertencias y fallos de comunicacin . . . . . . . . . . . . . . . . . . . . . . . . . . 572
Apndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575
Apndice A Datos tcnicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577
Especificaciones tcnicas del controlador LTM R . . . . . . . . . . . . . . . . . . 578
Especificaciones tcnicas del mdulo de expansin LTM E . . . . . . . . . . 582
Caractersticas de las funciones de medicin y supervisin . . . . . . . . . . 585
Apndice B Parmetros configurables. . . . . . . . . . . . . . . . . . . . . . . . . 587
Configuracin de control y del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 588
Configuracin trmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 591
Parmetros de corriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593
Parmetros de tensin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596
Parmetros de potencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 599
Configuracin de comunicacin y HMI . . . . . . . . . . . . . . . . . . . . . . . . . . 601
1639505 06/2009 9
Apndice C Diagramas de cableado . . . . . . . . . . . . . . . . . . . . . . . . . . 607
C.1 Diagramas de cableado con formato IEC . . . . . . . . . . . . . . . . . . . . . . . . . 608
Diagramas de cableado del modo de sobrecarga. . . . . . . . . . . . . . . . . . . 610
Diagramas de cableado del modo independiente. . . . . . . . . . . . . . . . . . . 614
Diagramas de cableado del modo de 2 sentidos de marcha . . . . . . . . . . 616
Diagramas de cableado del modo estrella-tringulo de dos tiempos . . . . 618
Diagramas de cableado del modo de resistencia principal
de dos pasos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 620
Diagramas de cableado del modo de autotransformador
de dos tiempos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622
Diagramas de cableado del modo Dahlander de dos velocidades . . . . . . 624
Diagramas de cableado del modo de cambio de polarizacin
de dos velocidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 626
C.2 Diagramas de cableado con formato NEMA. . . . . . . . . . . . . . . . . . . . . . . 628
Diagramas de cableado del modo de sobrecarga. . . . . . . . . . . . . . . . . . . 630
Diagramas de cableado del modo independiente. . . . . . . . . . . . . . . . . . . 634
Diagramas de cableado del modo de 2 sentidos de marcha . . . . . . . . . . 636
Diagramas de cableado del modo estrella-tringulo de dos tiempos . . . . 638
Diagramas de cableado del modo de resistencia principal
de dos pasos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 640
Diagramas de cableado del modo de autotransformador
de dos tiempos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642
Diagramas de cableado del modo de dos velocidades:
Devanado sencillo (polo consecuente) . . . . . . . . . . . . . . . . . . . . . . . . . . . 644
Diagramas de cableado del modo de dos velocidades:
Devanado independiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 649
ndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655
10 1639505 06/2009
1639505 06/2009 11
Informacin de seguridad
Informacin importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el
dispositivo antes de instalarlo, utilizarlo o realizar su mantenimiento. Los mensajes
especiales que se ofrecen a continuacin pueden aparecer a lo largo de la
documentacin o en el equipo para advertir de peligros potenciales o para ofrecer
informacin que aclara o simplifica los distintos procedimientos.
12 1639505 06/2009
TENGA EN CUENTA
La instalacin, manejo, puesta en servicio y mantenimiento de equipos elctricos
debern ser realizados slo por personal cualificado. Schneider Electric no se hace
responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construccin, el funcionamiento y la instalacin de equipos elctricos
y que ha sido formada en materia de seguridad para reconocer y evitar los riesgos
que conllevan tales equipos.
1639505 06/2009 13
Acerca de este libro
Presentacin
Objeto
En este manual se describe la versin del protocolo de red Modbus
/TCP del
controlador de gestin de motores TeSys
T LTM R y el mdulo de expansin
LTM E. El objetivo de este manual es:
por una parte, describir y explicar las funciones de supervisin, proteccin y
control del controlador LTM R y el mdulo de expansin LTM E, y
por la otra, proporcionar la informacin necesaria para implementar y respaldar
una solucin que se adapte lo mejor posible a los requisitos de su aplicacin
En el manual se describen las 4 partes principales de una implementacin
satisfactoria del sistema:
instalacin del controlador LTM R y el mdulo de expansin LTM E
puesta en marcha del controlador LTM R mediante el ajuste de los parmetros
esenciales
uso del controlador LTM R y el mdulo de expansin LTM E, con y sin otros
dispositivos de interfaz hombre-mquina
mantenimiento del controlador LTM R y el mdulo de expansin LTM E
Este manual va dirigido a:
ingenieros de diseo
integradores de sistemas
operadores de sistemas
ingenieros de mantenimiento
Campo de aplicacin
Este manual es vlido para todos los controladores LTM R Modbus
/TCP. Algunas
funciones estn disponibles dependiendo de la versin del software del controlador.
14 1639505 06/2009
Documentos relacionados
Puede descargar estas publicaciones tcnicas y otra informacin tcnica de nuestro
sitio web www.schneider-electric.com.
Comentarios del usuario
Enve sus comentarios a la direccin electrnica techcomm@schneider-
electric.com.
Ttulo de la documentacin Reference Number
Gua de inicio rpido de TeSys
T LTM R Modbus
/TCP
Controlador de gestin de motores
1639576
Manual de instrucciones del TeSys
T LTM R
1639508
Manual de instrucciones del TeSys
T LTM E
1639509
Manual del usuario de TeSys
T LTM CU Unidad de operador de
control
1639581
Manual de instrucciones del TeSys
T LTM CU
1639582
Manual de usuario del editor de lgica personalizada del controlador
de gestin de motores TeSys
T LTM R
1639507
Manual de usuario del XBT-N 1681029
Manual de instrucciones del XBT-N 1681014
1639505 06/2009 15
1
Introduccin
1639505 06/2009
Introduccin al sistema de gestin
de motores TeSys
T
Descripcin general
En este captulo se presenta el sistema de gestin de motores TeSys
T y sus
dispositivos complementarios.
Contenido de este captulo
Este captulo contiene los siguiente apartados:
Apartado Pgina
Presentacin del sistema de gestin de motores TeSys
T
16
Gua de seleccin del sistema 24
Descripcin fsica del controlador LTM R con el protocolo Modbus
/TCP
28
Descripcin fsica del mdulo de expansin LTM E 31
Introduccin
16 1639505 06/2009
Presentacin del sistema de gestin de motores TeSys
T
Objetivo del producto
El sistema de gestin de motores TeSys
T ofrece capacidades de proteccin,
control y supervisin para los motores de induccin de CA monofsicos y trifsicos.
Al tratarse de un sistema modular y flexible, se puede configurar para satisfacer las
necesidades de las aplicaciones industriales. El sistema est diseado para
satisfacer las necesidades de los sistemas de proteccin integrados con comunica-
ciones abiertas y una arquitectura global.
La mayor precisin de los sensores y la total proteccin electrnica del motor
garantizan la mejor utilizacin del motor. Las completas funciones de supervisin
permiten analizar las condiciones de funcionamiento del motor y reaccionar de
forma ms rpida para impedir la parada del sistema.
El sistema ofrece funciones de diagnstico e histricos, as como advertencias y
fallos configurables, lo que permite predecir de forma ptima el mantenimiento de
los componentes, y proporciona datos para mejorar continuamente todo el sistema.
Introduccin
1639505 06/2009 17
Ejemplos de segmentos de maquinaria admitidos
El sistema de gestin de motores es aplicable a los siguientes segmentos de
maquinaria:
Segmento de maquinaria Ejemplos
Segmentos de maquinaria especial y de
proceso
Tratamiento de agua y aguas residuales
tratamiento de agua (sopladores y agitadores)
Metal, minerales y minera
cemento
vidrio
acero
extraccin de minerales
Aceite y gas
procesamiento de aceite y gas
petroqumica
refinera, plataforma marina
Microelectrnica
Farmacutica
Industria qumica
cosmticos
detergentes
fertilizantes
pintura
Industria del transporte
lneas de transporte
aeropuertos
Otras industrias
tuneladoras
gras
Segmentos de maquinaria compleja Comprende las mquinas de alto nivel de automatizacin o
coordinacin utilizadas en:
sistemas de bombeo
transformacin de papel
lneas de impresin
HVAC (climatizacin, ventilacin y calefaccin)
Introduccin
18 1639505 06/2009
Industrias
El sistema de gestin de motores es aplicable a las siguientes industrias y sectores
empresariales asociados:
Sistema de gestin de motores TeSys
T
Los dos componentes de hardware principales del sistema son el controlador
LTM R y el mdulo de expansin LTM E. El sistema puede configurarse y
controlarse mediante un dispositivo HMI (Interfaz hombre mquina) (XBT de
Magelis
o TeSys
T LTM CU), un PC con el software PowerSuite o a distancia
a travs de una red utilizando un PLC o el servidor web Ethernet.
Otros componentes como los transformadores de corriente de carga externos del
motor y los transformadores de corriente de tierra aaden una mayor proteccin al
sistema.
Industria Sectores Aplicacin
Edificios edificios de oficinas
centros comerciales
naves industriales
barcos
hospitales
centros culturales
aeropuertos
Control y gestin de las instalaciones de edificios:
sistemas HVAC crticos
agua
aire
gas
electricidad
vapor
Industria metal, minerales y minera: cemento,
vidrio, acero, extraccin de minerales
microelectrnica
petroqumica
etanol
qumica: industria de pasta y papel
farmacutica
alimentos y bebidas
control y supervisin de motores-bomba
control de la ventilacin
control de la traccin y los movimientos de carga
visualizacin de estado y comunicacin con
mquinas
proceso y comunicacin de los datos capturados
gestin remota de los datos en uno o varios sitios
a travs de Internet
Energa e
infraestructura
tratamiento y transporte del agua
infraestructura de transporte de
personas y mercancas: aeropuertos,
tneles de carretera, metros y tranvas
generacin y transporte de energa
control y supervisin de motores-bomba
control de la ventilacin
control remoto de turbinas elicas
gestin remota de los datos en uno o varios sitios
a travs de Internet
Introduccin
1639505 06/2009 19
Controlador LTM R
El controlador LTM R, basado en microprocesador, es el componente principal del
sistema que gestiona las funciones de control, proteccin y supervisin de los
motores de induccin de CA monofsicos y trifsicos. El controlador LTM R est
diseado para trabajar a travs de diversos protocolos de bus de campo.
La gama incluye seis modelos de controlador LTM R que utilizan el protocolo de
comunicacin Modbus
/TCP.
Mdulo de expansin LTM E
La gama incluye dos modelos del mdulo de expansin LTM E que proporcionan
funcionalidad de supervisin de tensin y 4 entradas lgicas adicionales. El mdulo
de expansin LTM E est alimentado por el controlador LTM R a travs de un cable
conector.
Controlador LTM R Descripcin funcional Nmero de referencia
deteccin de corriente 0,4...100 A
entradas de corriente
6 entradas lgicas TON
4 salidas de rel: 3 SPST, 1 DPST
conexiones para un sensor de corriente de tierra
conexin para un sensor de temperatura del motor
conexin para red
conexin para dispositivo HMI o mdulo de expansin
funciones de proteccin, medicin y supervisin de la
corriente
funciones de control del motor
indicador de corriente
indicadores LED de fallo y advertencia
indicadores de comunicacin de red y alarma
indicador LED de comunicacin HMI
funcin de comprobacin y rearme
LTMR08EBD
(24 V CC, 0,4...8 A FLC)
LTMR27EBD
(24 V CC, 1,35...27 A FLC)
LTMR100EBD
(24 V CC, 5...100 A FLC)
LTMR08EFM
(100...240 V CA, 0,4...8 A FLC)
LTMR27EFM
(100...240 V CA, 1,35...27 A FLC)
LTMR100EFM
(100...240 V CA, 5...100 A FLC)
Mdulo de
expansin LTM E
Descripcin funcional Nmero de referencia
deteccin de tensin 110...690 V ca
3 entradas de tensin
4 entradas lgicas TON adicionales
funciones adicionales de proteccin, medicin y supervisin de la
tensin
indicador LED de corriente
indicadores LED de estado de entrada lgica
Otros componentes necesarios para un mdulo de expansin
opcional:
cable de conexin del controlador LTM R al mdulo de expansin
LTM E
LTMEV40BD (entradas
lgicas de 24 V cc)
LTMEV40FM (entradas
lgicas de 100...240 V
ca)
Introduccin
20 1639505 06/2009
Dispositivo HMI: XBTN410 de Magelis
El sistema utiliza el dispositivo HMI XBTN410 de Magelis
con una pantalla de
cristal lquido.
Dispositivo HMI: Unidad de operador de control LTM CU
El sistema utiliza un dispositivo HMI de unidad de operador de control TeSys
T
LTM CU con una pantalla de cristal lquido y botones de navegacin contextual. El
LTM CU recibe la alimentacin internamente del controlador LTM R. Este cuenta
con un manual de usuario individual.
XBTN410 de Magelis
Descripcin funcional Nmero de referencia
configuracin del sistema a travs de entradas de mens
visualizacin de parmetros, advertencias y fallos
Otros componentes necesarios para un dispositivo HMI
opcional:
una fuente de alimentacin independiente
cable de comunicacin del LTM R/LTM E a HMI
software de programacin XBTL1000 de Magelis
XBTN410 (HMI)
XBTZ938 (cable)
XBTL1000 (software)
Unidad de operador de
control LTM CU
Descripcin funcional Nmero de referencia
configuracin del sistema a travs de entradas de
mens
visualizacin de parmetros, advertencias y fallos
control del motor
Otros componentes necesarios para un dispositivo
HMI opcional:
cable de comunicacin del LTM R/LTM E a HMI
cable de comunicacin del HMI al PC
LTM CU
VW3A1104R.0
(cable de comunicacin de
HMI)
VW3A8106
(juego de cables
PowerSuite)
LTM9KCU
Juego para LTM CU porttil
Introduccin
1639505 06/2009 21
Software PowerSuite
El software PowerSuite es una aplicacin basada en Microsoft
Windows
.
Transformadores de corriente
Los transformadores de corriente externa amplan la gama actual de uso con
motores de ms de 100 amperios a plena carga.
Software PowerSuite Descripcin funcional Nmero de referencia
configuracin del sistema a travs de entradas de
mens
visualizacin de parmetros, advertencias y fallos
control del motor
activacin de la personalizacin de los modos de
funcionamiento
Otros componentes necesarios para el software
PowerSuite:
un PC
una fuente de alimentacin independiente
cable de comunicacin del LTM R/LTM E al PC
PowerSuite
VW3A8106
(juego de cables
PowerSuite)
Transformadores de
corriente Schneider Electric
Primario Secundari
o
Dimetro interno Nmero de referencia
mm in.
100 1 35 1.38 LT6CT1001
200 1 35 1.38 LT6CT2001
400 1 35 1.38 LT6CT4001
800 1 35 1.38 LT6CT8001
Nota: Tambin estn disponibles los siguientes transformadores: Schneider Electric
LUTC0301, LUTC0501, LUTC1001, LUTC2001, LUTC4001 y LUTC8001.
Introduccin
22 1639505 06/2009
Los transformadores de corriente de tierra externa miden las condiciones de fallo a
tierra.
El juego de conexiones incluye barras de bus y lengetas que adaptan el paso por
las ventanas de cableado y proporcionan terminaciones de lnea y de carga para el
circuito de alimentacin.
Transformadores de corriente
de tierra Vigirex
Schneider Electric
Tipo Corriente
mxima
Dimetro interno Relacin de
transformacin
Nmero de
referencia
mm in.
TA30 65 A 30 1.18 1000:1 50437
PA50 85 A 50 1.97 50438
IA80 160 A 80 3.15 50439
MA120 250 A 120 4.72 50440
SA200 400 A 200 7.87 50441
PA300 630 A 300 11.81 50442
POA 85 A 46 1.81 50485
GOA 250 A 110 4.33 50486
Juego de conexiones
Square D
Descripcin Nmero de referencia
Juego de conexiones Square D MLPL9999
Introduccin
1639505 06/2009 23
Cables
Los componentes del sistema necesitan cables para conectarse con otros
componentes y comunicarse con la red.
Cable Descripcin Nmero de referencia
Cable conector de 0,04 m (1.57 in.) de longitud, para la
conexin lado a lado entre el LTM R y el LTM E
LTMCC004
Cable conector entre el LTM R y el LTM E RJ45 de 0,3 m (11.81
in.) de longitud
LU9R03
Cable conector entre el LTM R y el LTM E RJ45 de 1,0 m (3.28
ft) de longitud
LU9R10
Cable de conexin de red de par trenzado apantallado/no
apantallado de categora 5 con 2 conectores RJ45
490 NTW000
Cable de conexin entre el LTM R/LTM E y el dispositivo HMI
de Magelis
de 2,5 m (8.20 ft) de longitud
XBTZ938
Cable de conexin entre el LTM R/LTM E y el dispositivo HMI
LTM CU de 1,0 m (3.28 ft) o 3,0 m (9.84 ft) de longitud
VW3A1104R10
VW3A1104R30
Juego de cables PowerSuite que incluye cable de
comunicacin entre el LTM E/LTM R y un PC de 1,0 m (3.28 in.)
de longitud
VW3A8106
Introduccin
24 1639505 06/2009
Gua de seleccin del sistema
Descripcin general
En esta seccin se describe el controlador LTM R con y sin el mdulo de expansin
opcional LTM E para las funciones de medicin, supervisin, proteccin y control.
Funciones de medicin y supervisin
medicin
contadores de fallos y advertencias
fallos de supervisin de sistemas y dispositivos
historial del motor
estado de funcionamiento del sistema
Funciones de proteccin
proteccin trmica del motor
proteccin de corriente del motor
proteccin de alimentacin y tensin del motor
Funciones de control
canales de control (seleccin de origen de control local/a distancia)
modos de funcionamiento
gestin de fallos
Funciones de medicin
En la siguiente tabla se muestra el equipo necesario para permitir las funciones de
medicin del sistema de gestin de motores:
Funcin Controlador LTM R LTM R con LTM E
Medicin
Corrientes de lnea X X
Corriente de tierra X X
Corriente media X X
Corriente-desequilibrio de fases X X
Nivel de capacidad trmica X X
Motor-sensor de temperatura X X
Frecuencia X
Tensin lnea a lnea X
Desequilibrio de tensin de red X
Tensin media X
Factor de potencia X
X La funcin est disponible
La funcin no est disponible
Introduccin
1639505 06/2009 25
Potencia activa X
Potencia reactiva X
Potencia activa-consumo X
Potencia reactiva-consumo X
Fallos de supervisin de sistema y dispositivo
Fallos internos del controlador X X
Controlador-temperatura interna X X
Diagnstico de errores de comandos de control X X
Fallo de cableado - Conexiones del sensor de temperatura X X
Fallo de cableado - Conexiones de corriente X X
Fallo de cableado - Conexiones de tensin X
Suma de comprobacin de configuracin X X
Prdida de comunicacin X X
Tiempo hasta el disparo X X
Contadores de fallos y advertencias
Nmero de fallos de proteccin X X
Contador de advertencias de proteccin X X
Contador de defectos de diagnstico X X
Contador de funciones de control del motor X X
Historial de fallos X X
Historial del motor
Arranques del motor / arranques de O1 / arranques de O2 X X
Tiempo de funcionamiento X X
Arranques del motor por hora X X
Motor-corriente del ltimo arranque X X
Motor-duracin del ltimo arranque X X
Estado de funcionamiento del sistema
Motor-en marcha X X
Motor listo X X
Motor-en arranque X X
Mnimo-tiempo de espera X X
Funcin Controlador LTM R LTM R con LTM E
X La funcin est disponible
La funcin no est disponible
Introduccin
26 1639505 06/2009
Funciones de proteccin
En la siguiente tabla se muestra el equipo necesario para permitir las funciones de
proteccin del sistema de gestin de motores:
Funciones Controlador LTM R LTM R con LTM E
Sobrecarga trmica X X
Corriente-desequilibrio de fases X X
Prdida de corriente de fase X X
Inversin de corrientes de fase X X
Arranque prolongado X X
Agarrotamiento X X
Infracorriente X X
Sobrecorriente X X
Corriente de tierra X X
Motor-sensor de temperatura X X
Ciclo rpido-bloqueo X X
Tensin-desequilibrio de fases X
Prdida de tensin de fase X
Inversin de tensin de fase X
Infratensin X
Sobretensin X
Descarga X
Potencia insuficiente X
Potencia excesiva X
Factor de potencia insuficiente X
Factor de potencia excesivo X
X La funcin est disponible
La funcin no est disponible
Introduccin
1639505 06/2009 27
Funciones de control
En la siguiente tabla se muestra el equipo necesario para permitir las funciones de
control del sistema de gestin de motores:
Funciones de control Controlador LTM R LTM R con LTM E
Canales de control del motor
Bornero de conexin X X
HMI X X
A distancia X X
Modo de funcionamiento
Sobrecarga X X
Independiente X X
2 sentidos de marcha X X
Dos tiempos X X
Dos velocidades X X
Personalizado X X
Gestin de fallos
Rearme manual X X
Rearme automtico X X
Rearme a distancia X X
X La funcin est disponible
La funcin no est disponible
Introduccin
28 1639505 06/2009
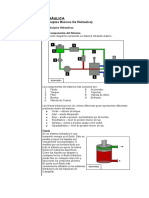
Descripcin fsica del controlador LTM R con el protocolo Modbus
/TCP
Entradas de corriente de fase
El controlador LTM R incluye transformadores de corriente interna para medir la
corriente de la fase de carga del motor directamente a partir de los cables de
alimentacin de carga del motor o de secundarios de transformadores de corriente
externa.
1 Ventanas para la medicin de la corriente de fase
Introduccin
1639505 06/2009 29
Cara frontal
La cara frontal del controlador LTM R incluye las siguientes caractersticas:
1 Botn Test/Reset
2 Puerto LTM E/HMI con conector RJ45 para la conexin del controlador LTM R a un HMI,
un PC o un mdulo de expansin LTM E
3 Puerto nmero 1 Ethernet con conector RJ45 para la conexin del controlador LTM R a
una red Modbus/TCP
4 Puerto nmero 2 Ethernet con conector RJ45 para la conexin del controlador LTM R a
una red Modbus/TCP
5 LED indicadores de estado del LTM R
6 Bornero enchufable: alimentacin de control, entradas lgicas y comunes
7 Bornero enchufable: rel de salida unipolar/bipolar (DPST)
8 Rel de salida de bornero enchufable
9 Bornero enchufable: entrada de fallo a tierra y entrada de sensor de temperatura
10 Conmutadores rotatorios (decenas y unidades) para direccionamiento IP
11 Enlace del puerto Ethernet y LED de actividad
12 Direccin MAC
Introduccin
30 1639505 06/2009
LED
Descripciones de los LED del controlador LTM R:
Nombre de LED Descripcin
LED de estado del LTM R:
HMI Comm Comunicacin entre el controlador LTM R y un dispositivo HMI, un PC o un mdulo de
expansin LTM E
Power Condicin de alimentacin o fallo interno del controlador LTM R
Alarm Fallo o advertencia de proteccin, o fallo interno
Recuperacin Prdida de comunicacin entre el controlador LTM R y la red o el origen de control HMI
STS Estado de red Modbus/TCP
LED de estado del puerto Ethernet:
LK Estado del enlace Ethernet
ACT Estado de actividad de comunicacin Ethernet
Introduccin
1639505 06/2009 31
Descripcin fsica del mdulo de expansin LTM E
Descripcin general
El mdulo de expansin LTM E ampla las funciones de supervisin y control del
controlador LTM R al proporcionar mediciones de la tensin y entradas lgicas
adicionales:
3 entradas de tensin de fase
4 entradas lgicas TON adicionales
Mdulo de expansin LTM E Mdulo de expansin LTM E conectado a un controlador LTM R
Introduccin
32 1639505 06/2009
Cara frontal del mdulo de expansin LTM E
La cara frontal del mdulo de expansin LTM E incluye las siguientes
caractersticas:
1 Puerto con conector RJ45 al dispositivo HMI o al PC
2 Puerto con conector RJ45 al controlador LTM R
3 LED indicadores de estado
4 Bornero enchufable: entradas de tensin
5 Bornero enchufable: entradas lgicas y comn
NOTA: Las entradas lgicas se alimentan externamente de acuerdo con las
tensiones nominales.
LED
Descripcin de los LED del mdulo de expansin LTM E
Nombre de LED Descripcin
Power Estado de alimentacin/fallo
I.7 Estado de entrada lgica I.7
I.8 Estado de entrada lgica I.8
I.9 Estado de entrada lgica I.9
I.10 Estado de entrada lgica I.10
1639505 06/2009 33
2
Funciones de medicin y supervisin
1639505 06/2009
Funciones de medicin y
supervisin
Descripcin general
El controlador LTM R proporciona funciones de deteccin, medicin y supervisin
en apoyo a las funciones de proteccin de fallos de corriente, temperatura y fallo a
tierra. Cuando se conecta a un mdulo de expansin LTM E, el controlador LTM R
proporciona adems funciones de medicin de tensin y potencia.
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
2.1 Medicin 34
2.2 Fallos de supervisin de sistemas y dispositivos 52
2.3 Contadores de fallos y advertencias 68
2.4 Historial del motor 75
2.5 Estado de funcionamiento del sistema 80
Funciones de medicin y supervisin
34 1639505 06/2009
2.1 Medicin
Descripcin general
El controlador LTM R utiliza estas mediciones para llevar a cabo funciones de
proteccin, control, supervisin y lgicas. Cada medicin se describe de forma
detallada en esta seccin.
El acceso a las mediciones se puede realizar a travs de:
un PC con el software PowerSuite
un dispositivo HMI
un PLC a travs de un puerto de red
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Corrientes de lnea 35
Corriente de tierra 37
Corriente media 40
Desequilibrio de corrientes de fase 42
Nivel de capacidad trmica 43
Sensor de temperatura del motor 44
Frecuencia 45
Tensiones lnea a lnea 45
Desequilibrio de tensin de red 46
Tensin media 47
Factor de potencia 48
Potencia activa y potencia reactiva 50
Consumo de potencia activa y consumo de potencia reactiva 51
Funciones de medicin y supervisin
1639505 06/2009 35
Corrientes de lnea
Descripcin
El controlador LTM R mide las corrientes de lnea y proporciona el valor de cada
fase en amperios y como un porcentaje de FLC.
La funcin de corrientes de lnea devuelve el valor eficaz en amperios de las
corrientes de fase de las 3 entradas de CT:
L1: corriente fase 1
L2: corriente fase 2
L3: corriente fase 3
El controlador LTM R realiza clculos del valor eficaz verdadero de las corrientes
de lnea hasta el sptimo armnico.
La corriente de una fase se mide a partir de L1 y L3.
Caractersticas de las corrientes de lnea
La funcin de corrientes de lnea presenta las siguientes caractersticas:
Relacin de corriente de lnea
El parmetro Corriente L1, L2 o L3-relacin proporciona la corriente de fase como
un porcentaje de FLC.
Frmulas de la relacin de corriente de lnea
El valor de corriente de lnea de la fase se compara con el parmetro FLC, donde
FLC es FLC1 o FLC2, el que est activo en ese momento.
Caracterstica Valor
Unidad A
Precisin +/-1% para modelos de 8 A y 27 A
+/-2% para modelos de 100 A
Resolucin 0,01 A
Intervalo de actualizacin 100 ms
Medicin calculada Frmula
Relacin de corriente de lnea 100 x Ln / FLC
Donde:
FLC = parmetro FLC1 o FLC2, el que est activo en ese momento
Ln = valor de corriente L1, L2 o L3 en amperios
Funciones de medicin y supervisin
36 1639505 06/2009
Caractersticas de la relacin de corriente de lnea
La funcin de relacin de corriente de lnea presenta las siguientes caractersticas:
Caracterstica Valor
Unidad % de FLC
Precisin Consulte Caractersticas de las corrientes de lnea, pgina 35
Resolucin 1% FLC
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
1639505 06/2009 37
Corriente de tierra
Descripcin
El controlador LTM R mide las corrientes de tierra y proporciona valores en
amperios y como un porcentaje de FLCmin.
La corriente de tierra interna (Iti) la calcula el controlador LTM R a partir de 3
corrientes de lnea medidas por los transformadores de corriente de carga. Indica
0 cuando la corriente desciende por debajo del 10% de FLCmin.
La corriente de tierra externa (Iti) la mide el transformador de corriente de tierra
externa conectado a los terminales Z1 y Z2.
Parmetros configurables
La configuracin del canal de control presenta los siguientes parmetros
configurables:
Frmula de la corriente de tierra externa
El valor de la corriente de tierra externa depende de la configuracin de los
parmetros:
Parmetro Intervalo de ajuste Ajuste de fbrica
Corriente de tierra-modo Interna
Externa
Interna
Corriente de tierra-relacin Ninguna
100:1
200:1.5
1000:1
2000:1
Otra relacin
Ninguna
CT de tierra-primario 165.535 1
CT de tierra-secundario 165.535 1
Medicin calculada Frmula
Corriente de tierra externa (Corriente a travs de Z1-Z2) x (CT de tierra-primario) / (CT de tierra-secundario)
Funciones de medicin y supervisin
38 1639505 06/2009
Caractersticas de la corriente de tierra
La funcin de corriente de tierra presenta las siguientes caractersticas:
Corriente de tierra-relacin
El parmetro Corriente de tierra-relacin proporciona el valor de la corriente de
tierra como un porcentaje de FLCmin.
Frmulas de relacin de corriente de tierra
El valor de corriente de tierra se compara con FLCmin.
Caracterstica Valor
Corriente de tierra interna (Iti) Corriente de tierra externa (Iti)
Unidad A A
Precisin
LTM R 08xxx Iti 0,3 A +/10% Superior a +/5% o +/0,01 A
0,2 A Iti 0,3 A +/15%
0,1 A Iti 0,2 A +/20%
Iti < 0,1 A
N/D
(1)
LTM R 27xxx Iti 0,5 A +/10%
0,3 A Iti 0,5 A +/15%
0,2 A Iti 0,3 A +/20%
Iti < 0,2 A
N/D
(1)
LTM R 100xxx Iti 1,0 A +/10%
0,5 A Iti 1,0 A +/15%
0,3 A Iti 0,5 A +/20%
Iti < 0,3 A
N/D
(1)
Resolucin 0,01 A 0,01 A
Intervalo de actualizacin 100 ms 100 ms
(1) En corrientes de esta magnitud o inferior, no debe utilizarse la funcin de corriente de tierra interna. En su lugar,
utilice los transformadores de corriente de tierra externa.
Medicin calculada Frmula
Corriente de tierra-relacin 100 x corriente de tierra / FLCmn
Funciones de medicin y supervisin
1639505 06/2009 39
Caractersticas de la relacin de corriente de tierra
La funcin de relacin de corriente de tierra presenta las siguientes caractersticas:
Caracterstica Valor
Unidad 02.000% de FLCmn
Precisin Consulte las caractersticas de corriente de tierra anteriores
Resolucin 0,1% FLCmn
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
40 1639505 06/2009
Corriente media
Descripcin
El controlador LTM R calcula la corriente media y proporciona el valor de la fase en
amperios y como porcentaje de FLC.
La funcin de corriente media devuelve el valor eficaz de la corriente media.
Frmulas de la corriente media
El controlador LTM R calcula la corriente media a partir de las corrientes de lnea
medidas. Los valores medidos se suman internamente con la siguiente frmula:
Caractersticas de la corriente media
La funcin de corriente media presenta las siguientes caractersticas:
Corriente media-relacin
El parmetro Corriente media-relacin proporciona el valor de la corriente media
como un porcentaje de FLC.
Frmulas de la relacin de corriente media
El valor de corriente media de la fase se compara con el parmetro FLC, donde FLC
es FLC1 o FLC2, el que est activo en ese momento.
Medicin calculada Frmula
Corriente media, motor trifsico Imed = (L1 + L2 + L3) / 3
Corriente media, motor monofsico Imed = (L1 + L3) / 2
Caracterstica Valor
Unidad A
Precisin +/-1% para modelos de 8 A y 27 A
+/-2% para modelos de 100 A
Resolucin 0,01 A
Intervalo de actualizacin 100 ms
Medicin calculada Frmula
Corriente media-relacin 100 x imed / FLC
Donde:
FLC = parmetro FLC1 o FLC2, el que est activo en ese momento
lmed = valor de corriente media en amperios
Funciones de medicin y supervisin
1639505 06/2009 41
Caractersticas de la relacin de corriente media
La funcin de relacin de corriente media presenta las siguientes caractersticas:
Caracterstica Valor
Unidad % de FLC
Precisin Consulte las caractersticas de corriente media anteriores
Resolucin 1% FLC
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
42 1639505 06/2009
Desequilibrio de corrientes de fase
Descripcin
La funcin de desequilibrio de corrientes de fase mide el porcentaje mximo de
desviacin entre la corriente media y las corrientes de fase individuales.
Frmulas
La medida del desequilibrio de corrientes de fase se basa en la relacin de
desequilibrio calculada a partir de las siguientes frmulas:
Caractersticas
La funcin de desequilibrio de corriente de lnea presenta las siguientes
caractersticas:
Medicin calculada Frmula
Relacin de desequilibrio de corriente en la fase 1 (en %) Ii1 = (| L1 - Imed | x 100) / Imed
Relacin de desequilibrio de corriente en la fase 2 (en %) Ii2 = (| L2 - Imed | x 100) / Imed
Relacin de desequilibrio de corriente en la fase 3 (en %) Ii3 = (| L3 - Imed | x 100) / Imed
Relacin de desequilibrio de corriente para 3 fases (en %) Ides = Mx(Ii1, Ii2, Ii3)
Caracterstica Valor
Unidad %
Precisin +/-1,5% para modelos de 8 A y 27 A
+/-3% para modelos de 100 A
Resolucin 1%
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
1639505 06/2009 43
Nivel de capacidad trmica
Descripcin
La funcin de nivel de capacidad trmica utiliza 2 modos trmicos para calcular la
cantidad de capacidad trmica utilizada: uno para los devanados estatrico y
rotrico de cobre del motor y otro para el bastidor de hierro del motor. Se indica el
modelo trmico con la mxima capacidad utilizada.
Esta funcin tambin estima y muestra:
el tiempo que queda antes de que se desencadene un fallo de sobrecarga
trmica (consulte Tiempo hasta el disparo, pgina 65), y
el tiempo que queda hasta que la condicin de fallo desaparezca, una vez que
se ha desencadenado un fallo de sobrecarga trmica (consulte Mnimo-tiempo
de espera, pgina 81).
Caractersticas de la corriente de disparo
La funcin de nivel de capacidad trmica utiliza una de las siguientes caractersticas
de curva de disparo (TCC) seleccionadas:
tiempo definido
trmica inversa (predeterminado)
Modelos de nivel de capacidad trmica
Tanto los modelos de cobre como los de hierro utilizan la corriente de fase mxima
medida y el parmetro Motor-clase de disparo para generar una imagen trmica no
escalada. El nivel de capacidad trmica indicado se calcula escalando la imagen
trmica a FLC.
Caractersticas del nivel de capacidad trmica
La funcin de nivel de capacidad trmica presenta las siguientes caractersticas:
Caracterstica Valor
Unidad %
Precisin +/1%
Resolucin 1%
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
44 1639505 06/2009
Sensor de temperatura del motor
Descripcin
La funcin de sensor de temperatura del motor muestra un valor de resistencia en
ohmios medido por el sensor de temperatura de resistencia. Consulte la
documentacin del producto para comprobar el sensor de temperatura exacto que
se utiliza. Es posible utilizar 4 tipos de sensores de temperatura:
PTC binario
PT100
PTC analgico
NTC analgico
Caractersticas
La funcin de sensor de temperatura del motor presenta las siguientes
caractersticas:
Caracterstica Sensor de temperatura PT100 Otros sensores de temperatura
Unidad C o F, segn el valor del parmetro
Visualizacin en HMI - sensor de temperatura
en grados CF.
Precisin +/-2% +/-2%
Resolucin 1 C o 1 F 0,1
Intervalo de
actualizacin
500 ms 500 ms
Funciones de medicin y supervisin
1639505 06/2009 45
Frecuencia
Descripcin
La funcin de frecuencia muestra el valor medido segn las mediciones de la
tensin de red. Si la frecuencia es inestable (variaciones de +/2 Hz), el valor
registrado ser de 0 hasta que la frecuencia se estabilice.
Si no hay ningn mdulo de expansin LTM E, el valor de frecuencia ser de 0.
Caractersticas
La funcin de frecuencia presenta las siguientes caractersticas:
Tensiones lnea a lnea
Descripcin
La funcin de tensiones lnea a lnea muestra el valor eficaz de la tensin fase a fase
(V1 a V2, V2 a V3 y V3 a V1):
Tensin L1-L2: tensin fase 1 a fase 2
Tensin L2-L3: tensin fase 2 a fase 3
Tensin L3-L1: tensin fase 3 a fase 1
El mdulo de expansin realiza los clculos del valor eficaz verdadero de la tensin
lnea a lnea hasta el sptimo armnico.
La tensin de una fase se mide a partir de L1 y L3.
Caractersticas
La funcin de tensiones lnea a lnea presenta las siguientes caractersticas:
Caracterstica Valor
Unidad Hz
Precisin +/2%
Resolucin 0,1 Hz
Intervalo de actualizacin 30 ms
Caracterstica Valor
Unidad V ca
Precisin +/-1%
Resolucin 1 V ca
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
46 1639505 06/2009
Desequilibrio de tensin de red
Descripcin
La funcin de desequilibrio de tensin de red muestra el porcentaje mximo de
desviacin entre la tensin media y las tensiones de red individuales.
Frmulas
La medida calculada de desequilibrio de tensin de red se basa en las siguientes
frmulas:
Caractersticas
La funcin de desequilibrio de tensin de red presenta las siguientes
caractersticas:
Medicin calculada Frmula
Relacin de desequilibrio de tensin en la fase 1 en % Vi1 = 100 x | V1 - Vmed | / Vmed
Relacin de desequilibrio de tensin en la fase 2 en % Vi2 = 100 x | V2 - Vmed | / Vmed
Relacin de desequilibrio de tensin en la fase 3 en % Vi3 = 100 x | V3 - Vmed | / Vmed
Relacin de desequilibrio de tensin en las 3 fases en % Vdes = Mx (Vi1, Vi2, Vi3)
Donde:
V1 = tensin L1-L2 (tensin de fase 1 a fase 2)
V2 = tensin L2-L3 (tensin de fase 2 a fase 3)
V3 = tensin L3-L1 (tensin de fase 3 a fase 1)
Vmed = tensin media
Caracterstica Valor
Unidad %
Precisin +/1,5%
Resolucin 1%
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
1639505 06/2009 47
Tensin media
Descripcin
El controlador LTM R calcula la tensin media y proporciona el valor en voltios. La
funcin de tensin media devuelve el valor eficaz de la tensin media.
Frmulas
El controlador LTM R calcula la tensin media mediante el uso de las tensiones
lnea a lnea medidas. Los valores medidos se suman internamente con la siguiente
frmula:
Caractersticas
La funcin de tensin media presenta las siguientes caractersticas:
Medicin calculada Frmula
Tensin media, motor trifsico Vmed = (tensin L1-L2 + tensin L2-L3 + tensin L3-L1) / 3
Tensin media, motor monofsico Vmed = tensin L3-L1
Caracterstica Valor
Unidad V ca
Precisin +/-1%
Resolucin 1 V ca
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
48 1639505 06/2009
Factor de potencia
Descripcin
La funcin de factor de potencia muestra el desplazamiento de fase entre las
corrientes de fase y las tensiones de fase.
Frmula
El parmetro Factor de potencia, llamado tambin coseno de pi (o cos ),
representa el valor absoluto de la relacin de la potencia activa con la potencia
aparente.
El siguiente diagrama muestra un ejemplo de la curva sinusoidal del valor eficaz
promedio de corriente ligeramente retrasada con respecto a la curva sinusoidal del
valor eficaz promedio de tensin, y la diferencia de ngulo de fase entre las 2
curvas:
Funciones de medicin y supervisin
1639505 06/2009 49
Una vez medido el ngulo de fase (), el factor de potencia se puede calcular como
el coseno del ngulo de fase (), la relacin de la cara a (potencia activa) sobre la
hipotenusa h (potencia aparente):
Caractersticas
La funcin de potencia activa presenta las siguientes caractersticas:
Caracterstica Valor
Precisin +/-3% para cos 0,6
Resolucin 0,01
Intervalo de actualizacin
30 ms (tpico)
(1)
(1) El intervalo de actualizacin depende de la frecuencia.
Funciones de medicin y supervisin
50 1639505 06/2009
Potencia activa y potencia reactiva
Descripcin
El clculo de la potencia activa y la potencia reactiva se basa en:
el valor eficaz promedio de la tensin de fase de L1, L2, L3
el valor eficaz promedio de la corriente de fase de L1, L2, L3
el factor de potencia
el nmero de fases
Frmulas
La potencia activa, tambin conocida como potencia real, mide el valor eficaz
promedio de potencia. Se deriva de las frmulas siguientes:
La medicin de la potencia reactiva se deriva de las frmulas siguientes:
Caractersticas
Las funciones de potencia reactiva y potencia activa tienen las caractersticas
siguientes:
Medicin calculada Frmula
Potencia activa de motor trifsico 3 x Imed x Vmed x cos
Potencia activa de motor monofsico Imed x Vmed x cos
donde:
Imed = valor eficaz promedio de corriente
Vmed = valor eficaz promedio de tensin
Medicin calculada Frmula
Potencia reactiva de motor trifsico 3 x Imed x Vmed x sen
Potencia reactiva de motor monofsico Imed x Vmed x sen
donde:
Imed = valor eficaz promedio de corriente
Vmed = valor eficaz promedio de tensin
Caracterstica Potencia activa Potencia reactiva
Unidad kW kVAR
Precisin +/-5% +/-5%
Resolucin 0,1 kW 0,1 kVAR
Intervalo de actualizacin 100 ms 100 ms
Funciones de medicin y supervisin
1639505 06/2009 51
Consumo de potencia activa y consumo de potencia reactiva
Descripcin
Las funciones Potencia activa-consumo y Potencia reactiva-consumo muestran el
total acumulado de la potencia elctrica activa y reactiva proporcionada, y que la
carga ha utilizado o consumido.
Caractersticas
Las funciones de consumo de potencia reactiva y potencia activa tienen las
caractersticas siguientes:
Caracterstica Potencia activa-consumo Potencia reactiva-consumo
Unidad kWh kVARh
Precisin +/-5% +/-5%
Resolucin 0,1 kWh 0,1 kVARh
Intervalo de actualizacin 100 ms 100 ms
Funciones de medicin y supervisin
52 1639505 06/2009
2.2 Fallos de supervisin de sistemas y dispositivos
Descripcin general
El controlador LTM R y el mdulo de expansin LTM E detectan los fallos que
afectan a la capacidad de funcionamiento correcto del controlador LTM R
(comprobacin interna del controlador y comprobacin de errores de comunicacin,
cableado y configuracin).
Se puede acceder a los registros de fallos de supervisin de sistemas y dispositivos
a travs de:
un PC con el software PowerSuite
un dispositivo HMI
un PLC a travs de un puerto de red
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Controlador-fallo interno 53
Temperatura interna del controlador 54
Diagnstico de errores de comandos de control 56
Fallos de cableado 59
Suma de comprobacin de configuracin 61
Prdida de comunicacin 62
Tiempo hasta el disparo 65
Fallo y advertencia de configuracin de LTM E 66
Fallo externo 67
Funciones de medicin y supervisin
1639505 06/2009 53
Controlador-fallo interno
Descripcin
El controlador LTM R detecta y registra fallos que son internos al propio dispositivo.
Los fallos internos pueden ser leves o graves, y pueden cambiar el estado de los
rels de salida. Encender y apagar la alimentacin al controlador LTM R puede
borrar un fallo interno.
Cuando se produce un fallo interno, se establece el parmetro Controlador-fallo
interno.
Fallos internos graves
Durante un fallo grave, el controlador LTM R no puede ejecutar de forma fiable su
propia programacin y slo puede intentar apagarse. Adems, la comunicacin con
el controlador LTM R no es posible. Algunos fallos graves son:
fallo de desbordamiento de pila
fallo de escasez de pila
tiempo sobrepasado de vigilancia (watchdog)
fallo de suma de comprobacin del firmware
fallo de la CPU
fallo de temperatura interna (a 100 C / 212 F)
error de prueba de RAM
Fallos internos leves
Los fallos internos leves indican que los datos suministrados al controlador LTM R
no son fiables por lo que podra ponerse en peligro la proteccin. Durante un fallo
leve, el controlador LTM R sigue intentando supervisar el estado y la comunicacin,
pero no acepta comandos de arranque. En esta situacin, el controlador LTM R
sigue intentando detectar y notificar fallos graves, pero no otros fallos leves.
Algunos fallos leves son:
fallo interno de comunicacin de red
error de EEPROM
error de A/D fuera de servicio
botn de rearme bloqueado
fallo de temperatura interna (a 85 C / 185 F)
error de configuracin no vlida (configuracin conflictiva)
accin de funcin lgica incorrecta (por ejemplo, intentar escribir en un
parmetro de slo lectura)
Funciones de medicin y supervisin
54 1639505 06/2009
Temperatura interna del controlador
Descripcin
El controlador LTM R supervisa su temperatura interna, e informa de condiciones
de advertencia, fallo leve y fallo grave. La deteccin de fallos no se puede
desactivar. La deteccin de advertencias se puede activar o desactivar.
El controlador conserva un registro de la temperatura interna ms alta alcanzada.
Caractersticas
Los valores medidos de la temperatura interna del controlador presentan las
siguientes caractersticas:
Parmetros
La funcin de temperatura interna del controlador incluye un parmetro editable:
La funcin de temperatura interna del controlador incluye los siguientes umbrales
de fallo y advertencia fijos:
Una condicin de advertencia termina cuando la temperatura interna del
controlador LTM R desciende por debajo de 80 C (176 F).
Caracterstica Valor
Unidad C
Precisin +/-4 C (+/-7,2 F)
Resolucin 1 C (1,8 F)
Intervalo de actualizacin 100 ms
Parmetro Intervalo de ajuste Ajuste de fbrica
Controlador-activacin de advertencia de temperatura interna Activado
Desactivado
Activado
Condicin Valor de umbral fijo Establece el parmetro
Advertencia de temperatura interna 80 C (176 F) Advertencia de temperatura interna del
controlador
Fallo leve de temperatura interna 85 C (185 F) Controlador-fallo interno
Fallo grave de temperatura interna 100 C (212 F)
Funciones de medicin y supervisin
1639505 06/2009 55
Diagrama de bloques
T Temperatura
T > 80 C (176 F) Umbral de advertencia fijo
T > 85 C (185 F) Umbral de fallo leve fijo
T > 100 C (212 F) Umbral de fallo grave fijo
Temperatura mxima interna del controlador
El parmetro Controlador-temperatura interna mx. contiene la temperatura interna
ms alta, expresada en C, detectada por el sensor de temperatura interna del
controlador LTM R. El controlador LTM R actualiza este valor cada vez que detecta
una temperatura interna superior al valor actual.
El valor de la temperatura interna mxima no se borra cuando se restauran los
ajustes predeterminados de fbrica con Borrar todo-comando o cuando se
restablecen los histricos con Borrar histricos-comando.
Funciones de medicin y supervisin
56 1639505 06/2009
Diagnstico de errores de comandos de control
Descripcin
El controlador LTM R realiza pruebas de diagnstico que detectan y supervisan la
funcionalidad adecuada de los comandos de control.
Existen 4 funciones de diagnstico de comandos de control:
Comprobacin de comando de arranque
Verificacin del funcionamiento del motor
Comprobacin del comando de parada
Verificacin de parada
Configuracin de parmetros
Las 4 funciones de diagnstico se activan y desactivan como un grupo. Los
parmetros configurables son:
Comprobacin de comando de arranque
La comprobacin de comando de arranque comienza despus de un comando de
arranque, y hace que el controlador LTM R supervise el circuito principal para tener
la seguridad de que hay corriente. La comprobacin del comando de arranque:
informa de un fallo o advertencia del comando de arranque, si no se detecta
corriente despus de un retardo de 1 segundo, o
finaliza, si el motor est en estado de marcha y el controlador LTM R detecta
corriente 10% de FLCmin.
Verificacin del funcionamiento del motor
La verificacin del funcionamiento del motor hace que el controlador LTM R
supervise continuamente el circuito principal para tener la seguridad de que hay
corriente. La verificacin del funcionamiento del motor:
informa de un fallo o advertencia de verificacin del funcionamiento del motor si
no se detecta corriente de fase media durante ms de 0,5 segundos sin un
comando de parada, o
finaliza, cuando se ejecuta un comando de parada.
Parmetros Intervalo de ajuste Ajuste de fbrica
Diagnstico-activacin de fallo S / No S
Diagnstico-activacin de advertencia S / No S
Funciones de medicin y supervisin
1639505 06/2009 57
Comprobacin del comando de parada
La comprobacin del comando de parada empieza despus de un comando de
parada, y hace que el controlador LTM R supervise el circuito principal para tener
la seguridad de que no hay corriente. La comprobacin del comando de parada:
informa de un fallo o advertencia de comando de parada si se detecta corriente
despus de un retardo de 1 segundo, o
finaliza, si el controlador LTM R detecta corriente 5% de FLCmin.
Verificacin de parada
La verificacin de parada hace que el controlador LTM R supervise continuamente
el circuito principal para tener la seguridad de que no hay corriente. La verificacin
de parada:
informa de un fallo o advertencia de verificacin de parada si se detecta corriente
de fase media durante ms de 0,5 segundos sin un comando de marcha, o
finaliza, cuando se ejecuta un comando de marcha.
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo de la comprobacin
del comando de arranque y de la comprobacin del comando de parada:
1 Funcionamiento normal
2 Condicin de fallo o advertencia
3 El controlador LTM R supervisa el circuito principal para detectar corriente
4 El controlador LTM R supervisa el circuito principal para tener la seguridad de que no hay
corriente
5 El controlador LTM R informa de un fallo y/o advertencia de comprobacin del comando
de arranque si no se detecta corriente despus de 1 segundo
6 El controlador LTM R informa de un fallo y/o advertencia de comprobacin del comando
de parada si se detecta corriente despus de 1 segundo
Funciones de medicin y supervisin
58 1639505 06/2009
El siguiente diagrama es un ejemplo de la secuencia de tiempo de la verificacin del
funcionamiento del motor y la verificacin de parada:
1 Funcionamiento normal
2 Condicin de fallo o advertencia
3 Una vez que el motor entra en estado de marcha, el controlador LTM R supervisa
continuamente el circuito principal para detectar la presencia de corriente hasta que se
proporciona un comando de parada o se desactiva la funcin
4 El controlador LTM R supervisa continuamente el circuito principal para tener la seguridad
de que no hay corriente hasta que se proporciona un comando de arranque o se desactiva
la funcin
5 El controlador LTM R informa de un fallo y/o advertencia de verificacin de funcionamiento
del motor si no se detecta corriente durante ms de 0,5 segundos sin un comando de
parada
6 El controlador LTM R informa de un fallo y/o advertencia de verificacin de parada si se
detecta corriente durante ms de 0,5 segundos sin un comando de arranque
7 No hay corriente durante menos de 0,5 segundos
8 Hay corriente durante menos de 0,5 segundos
Funciones de medicin y supervisin
1639505 06/2009 59
Fallos de cableado
Descripcin
El controlador LTM R comprueba las conexiones de cableado externo e informa de
un fallo cuando detecta un cableado externo incorrecto o contradictorio. El
controlador LTM R puede detectar 4 errores de cableado:
Error de inversin de CT
Error de configuracin de fase
Errores de cableado del sensor de temperatura del motor (cortocircuito o circuito
abierto)
Activacin de la deteccin de fallos
Los diagnsticos de cableado se activan mediante los siguientes parmetros:
Error de inversin de CT
Cuando se utilizan CT de carga externos individuales, todos se deben instalar en la
misma direccin. El controlador LTM R comprueba el cableado de CT e informa de
un error si detecta que uno de los transformadores de corriente se ha cableado al
revs en comparacin con los otros.
Esta funcin se puede activar o desactivar.
Error de configuracin de fase
El controlador LTM R comprueba las 3 fases del motor para confirmar que la
corriente est en nivel y, luego, comprueba el parmetro Motor-fases. El controlador
LTM R informa de un error si detecta corriente en la fase 2 y el LTM R se ha
configurado para un funcionamiento monofsico.
Esta funcin est activada cuando el controlador LTM R se ha configurado para un
funcionamiento monofsico. No tiene parmetros configurables.
Proteccin Activacin de parmetros Intervalo de ajuste Ajuste de
fbrica
Cdigo de fallo
Inversin de CT Cableado-activacin de fallo S
No
S 36
Configuracin de fase Motor-fases, si se establece en
monofsico
Monofsico
Trifsico
Trifsico 60
Cableado del sensor
de temperatura del
motor
Motor-tipo de sensor de
temperatura, si se establece en un
tipo de sensor y no en Ninguno
Ninguno
PTC binario
PT100
PTC analgico
NTC analgico
Ninguno 34 (cortocircuito)
35 (circuito
abierto)
Funciones de medicin y supervisin
60 1639505 06/2009
Errores de sensor de temperatura del motor
Cuando el controlador LTM R est configurado para la proteccin del sensor de
temperatura del motor, el LTM R proporciona deteccin de cortocircuito y circuito
abierto para el elemento sensor de temperatura.
El controlador LTM R indica un error cuando la resistencia calculada en los
terminales T1 y T2:
desciende por debajo del umbral fijo de deteccin de cortocircuito, o
excede el umbral fijo de deteccin de circuito abierto
El fallo se debe reiniciar de acuerdo con el modo de rearme configurado: manual,
automtico o a distancia.
Los umbrales de deteccin de cortocircuito y circuito abierto no tienen temporizador
de fallo. No existen advertencias asociadas con la deteccin de cortocircuito y de
circuito abierto.
La deteccin de cortocircuito y circuito abierto del elemento sensor de temperatura
del motor est disponible para todos los estados de funcionamiento.
Esta proteccin est activada cuando se emplea y configura un sensor de
temperatura, y no se puede desactivar.
La funcin de sensor de temperatura del motor presenta las siguientes
caractersticas:
Los umbrales fijos para las funciones de deteccin de circuito abierto y cortocircuito
son:
Caracterstica Valor
Unidad
Intervalo de funcionamiento normal 156500
Precisin A 15 : +/-10%
A 6500 : +/-5%
Resolucin 0,1
Intervalo de actualizacin 100 ms
Funcin de deteccin Resultados fijos para PTC binario o PT100,
o PTC/NTC analgico
Precisin
Deteccin de cortocircuito
Umbral 15 +/10%
Reconexin 20 +/10%
Deteccin de circuito
abierto
Umbral 6500 +/5%
Reconexin 6000 +/5%
Funciones de medicin y supervisin
1639505 06/2009 61
Suma de comprobacin de configuracin
Descripcin
El controlador LTM R calcula una suma de comprobacin de parmetros a partir de
todos los registros de configuracin. No se notifican fallos.
Funciones de medicin y supervisin
62 1639505 06/2009
Prdida de comunicacin
Descripcin
El controlador LTM R supervisa la comunicacin a travs de:
el puerto de red
el puerto HMI
Configuracin de los parmetros del puerto de red
El controlador LTM R supervisa las comunicaciones de red y puede notificar un fallo
o una advertencia cuando se pierden las comunicaciones de red durante un periodo
de tiempo igual o superior al tiempo sobrepasado de prdida de comunicaciones.
La comunicacin del puerto de red presenta los siguientes parmetros
configurables:
Parmetro Intervalo de ajuste Ajuste de fbrica
Puerto de red-activacin de fallo Activado/Desactivado Activado
Puerto de red-activacin de advertencia Activado/Desactivado Activado
Puerto de red-tiempo sobrepasado de
prdida de comunicaciones
0...9999 s
en incrementos de 0,01 s
2 s
Puerto de red-ajuste de recuperacin
(1)
En espera
Marcha
O.1, O.2 desactivadas
O.1, O.2 activadas
O.1 desactivada
O.2 desactivada
O.1, O.2 desactivadas
(1) El modo de funcionamiento afecta a los parmetros configurables de recuperacin del puerto de red.
Funciones de medicin y supervisin
1639505 06/2009 63
Configuracin de los parmetros del puerto HMI
El controlador LTM R supervisa la comunicacin del puerto HMI y notifica tanto un
fallo como una advertencia si el puerto HMI no ha recibido comunicaciones vlidas
durante ms de 7 segundos.
La comunicacin del puerto HMI presenta los siguientes parmetros fijos y
configurables:
Condicin de recuperacin
Cuando se pierde la comunicacin entre el controlador LTM R y la red o el HMI, el
controlador LTM R se encuentra en una condicin de recuperacin. El comporta-
miento de las salidas lgicas O.1 y O.2 despus de una prdida de comunicacin
viene determinado por:
el modo de funcionamiento (consulte Modos de funcionamiento, pgina 198), y
los parmetros Puerto de red-ajuste de recuperacin y HMI-ajuste de
recuperacin de puerto
La seleccin del ajuste de recuperacin puede incluir:
Parmetro Intervalo de ajuste Predeterminado de fbrica
HMI-activacin de fallo de puerto Activado/Desactivado Activado
HMI-activacin de advertencia de puerto Activado/Desactivado Activado
HMI-ajuste de recuperacin de puerto
(1)
En espera
Marcha
O.1, O.2 desactivadas
O.1, O.2 activadas
O.1 desactivada
O.2 desactivada
O.1, O.2 desactivadas
(1) El modo de funcionamiento afecta a los parmetros configurables de recuperacin del puerto HMI.
Ajuste de recuperacin de
puerto
Descripcin
En espera (O.1, O.2) Indica al controlador LTM R que mantenga el estado de las salidas lgicas O.1 y
O.2 a partir del momento de la prdida de comunicacin.
Marcha Indica al controlador LTM R que ejecute un comando de marcha para una
secuencia de control de 2 tiempos en la prdida de comunicacin.
O.1, O.2 desactivadas Indica al controlador LTM R que desactive las salidas lgicas O.1 y O.2 tras una
prdida de comunicacin.
O.1, O.2 activadas Indica al controlador LTM R que active las salidas lgicas O.1 y O.2 tras una
prdida de comunicacin.
O.1 activada Indica al controlador LTM R que active slo la salida lgica O.1 tras una prdida
de comunicacin.
O.2 activada Indica al controlador LTM R que active slo la salida lgica O.2 tras una prdida
de comunicacin.
Funciones de medicin y supervisin
64 1639505 06/2009
En la siguiente tabla se indican las opciones de recuperacin que estn disponibles
para cada modo de funcionamiento:
NOTA: Cuando seleccione un ajuste de recuperacin de red o HMI, la seleccin
debe identificar un origen de control activo.
Ajuste de
recuperacin de
puerto
Modo de funcionamiento
Sobrecarga Independient
e
2 sentidos
de marcha
2 tiempos 2
velocidades
Personaliza
do
En espera (O.1, O.2) S S S S S S
Marcha No No No S No No
O.1, O.2 desactivadas S S S S S S
O.1, O.2 activadas S S No No No S
O.1 activada S S S No S S
O.2 activada S S S No S S
Funciones de medicin y supervisin
1639505 06/2009 65
Tiempo hasta el disparo
Descripcin
Cuando existe una condicin de sobrecarga trmica, el controlador LTM R notifica
el tiempo hasta el disparo antes de que se produzca el fallo en el parmetro Tiempo
hasta el disparo.
Si el controlador LTM R no est en estado de sobrecarga trmica, con el fin de evitar
que parezca que est en estado de fallo, el controlador LTM R notifica el tiempo
hasta el disparo como 9999.
Si el motor cuenta con un ventilador auxiliar y se ha fijado el parmetro Motor-
refrigeracin por ventilador auxiliar, el perodo de refrigeracin es 4 veces ms
corto.
Caractersticas
La funcin de tiempo hasta el disparo presenta las siguientes caractersticas:
Caracterstica Valor
Unidad s
Precisin +/10%
Resolucin 1 s
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
66 1639505 06/2009
Fallo y advertencia de configuracin de LTM E
Descripcin
El controlador LTM R controla la presencia del mdulo de expansin LTM E. Su
ausencia generar un fallo de supervisin del dispositivo y del sistema.
Fallo de configuracin de LTM E
Fallo de configuracin de LTM E:
Si se encuentran activados los fallos de proteccin fundamentados en el LTM E
pero no se encuentra presente un mdulo de expansin LTM E, se producir un
fallo de configuracin de LTM E.
No tiene ningn ajuste de retardo.
La condicin de fallo desaparecer cuando no est activado ningn fallo de
proteccin que requiera un LTM E, o cuando se haya apagado y encendido el
LTM R mientras est presente un LTM E adecuado.
Advertencia de configuracin de LTM E
Advertencia de configuracin de LTM E:
Si se encuentran activadas las advertencias de proteccin fundamentadas en el
LTM E pero no se encuentra presente un mdulo de expansin LTM E, se
producir una advertencia de configuracin de LTM E.
La advertencia desaparecer cuando no est activada ninguna advertencia de
proteccin que requiera un LTM E, o cuando se haya apagado y encendido el
LTM R mientras est presente un LTM E adecuado.
Funciones de medicin y supervisin
1639505 06/2009 67
Fallo externo
Descripcin
El controlador LTM R tiene una funcin de fallo externo, que detecta si un error ha
ocurrido en un sistema externo conectado al controlador.
Un fallo externo puede activarse si se configura un bit en un registro (consulte la
tabla siguiente). Este fallo externo lo utiliza principalmente la lgica personalizada
para poner el controlador en un estado de fallo en funcin de diversos parmetros
del sistema.
Un fallo externo solo se puede poner a cero si se borra el bit de fallo externo del
registro.
Configuracin de parmetros de fallo externo
Parmetro Descripcin
Comando de fallo externo de lgica
personalizada
El valor se escribe
Fallo de sistema externo Permite leer el parmetro de comando de fallo externo de lgica
personalizada
Cdigo de fallo El nmero es 16: fallo externo asignado por programa personalizado
con el editor de lgica personalizada
Funciones de medicin y supervisin
68 1639505 06/2009
2.3 Contadores de fallos y advertencias
Descripcin general
El controlador LTM R cuenta y registra el nmero de fallos y advertencias que se
producen. Adems, cuenta el nmero de intentos de rearme automtico. Se puede
tener acceso a esta informacin para que le ayude con el rendimiento y el
mantenimiento del sistema.
Se puede acceder a los contadores de fallos y advertencias a travs de:
un PC con el software PowerSuite
un dispositivo HMI
un PLC a travs de un puerto de red
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Introduccin a los contadores de fallos y advertencias 69
Todos los contadores de fallos 70
Todos los contadores de advertencias 70
Contador de rearme automtico 70
Contadores de fallos y advertencias de proteccin 71
Contador de errores de comandos de control 72
Contador de fallos de cableado 72
Contadores de prdida de comunicacin 73
Contadores de fallos internos 73
Historial de fallos 74
Funciones de medicin y supervisin
1639505 06/2009 69
Introduccin a los contadores de fallos y advertencias
Detectar advertencias
Si la funcin de deteccin de advertencias est activada, el controlador LTM R
detecta inmediatamente una advertencia cuando el valor supervisado asciende por
encima o desciende por debajo de un umbral establecido.
Detectar fallos
Para que el controlador LTM R detecte un fallo, deben darse algunas condiciones
previas. Estas condiciones pueden ser:
La funcin de deteccin de fallos debe estar activada.
Un valor supervisado, por ejemplo, corriente, tensin o resistencia trmica, debe
estar por encima o por debajo de un umbral establecido.
El valor supervisado debe permanecer por encima o por debajo de dicho umbral
durante un perodo de tiempo especificado.
Contadores
Cuando se produce un fallo, el controlador LTM R aumenta al menos 2 contadores:
uno para la funcin de deteccin de fallos especficos, y
otro para todos los fallos
Cuando se produce una advertencia, el controlador LTM R aumenta un solo
contador para todas las advertencias. Sin embargo, cuando el controlador LTM R
detecta una advertencia de sobrecarga trmica, tambin aumenta el contador de
advertencias de sobrecarga trmica.
Un contador contiene un valor de 0 a 65.535 y aumenta en un valor en 1 cuando se
produce un fallo, una advertencia o un suceso de rearme. El contador deja de
aumentar cuando llega al valor de 65.535.
Si un fallo se pone a cero automticamente, el controlador LTM R slo aumenta el
contador de rearmes automticos. Los contadores se guardan cuando se produce
una prdida de alimentacin.
Poner a cero contadores
La ejecucin de Borrar histricos-comando y Borrar todo-comando ponen a cero
todos los contadores de fallos y advertencias.
Funciones de medicin y supervisin
70 1639505 06/2009
Todos los contadores de fallos
Descripcin
El parmetro Fallos-nmero contiene el nmero de fallos que se han producido
desde la ltima vez que se ejecut el comando Borrar todos los histricos.
El parmetro Fallos-nmero incrementa su valor en 1 cuando el controlador LTM R
detecta cualquier fallo.
Todos los contadores de advertencias
Descripcin
El parmetro Advertencias-nmero contiene el nmero de advertencias que se han
producido desde la ltima vez que se ejecut el comando Borrar todos los
histricos.
El parmetro Advertencias-nmero aumenta su valor en 1 cuando el controlador
LTM R detecta cualquier advertencia.
Contador de rearme automtico
Descripcin
El parmetro Rearme automtico-nmero contiene el nmero de veces que el
controlador LTM R ha intentado, sin xito, el rearme automtico tras un fallo. Este
parmetro se utiliza para los 3 grupos de fallos con rearme automtico.
Si un intento de rearme automtico tiene xito (es decir, el mismo fallo no se repite
en 60 s), este contador se pone a cero. Si un fallo se pone a cero manualmente o a
distancia, el contador no aumenta.
Para obtener informacin acerca de la gestin de fallos, consulte Gestin de fallos
y comandos Borrar, pgina 230.
Funciones de medicin y supervisin
1639505 06/2009 71
Contadores de fallos y advertencias de proteccin
Nmero de fallos de proteccin
Los contadores de los fallos de proteccin son:
Corriente-nmero de fallos de desequilibrio de fases
Corriente-nmero de fallos de prdida de fase
Corriente-nmero de fallos de inversin de fases
Corriente de tierra-nmero de fallos
Agarrotamiento-nmero de fallos
Arranque prolongado-nmero de fallos
Motor-nmero de fallos de sensor de temperatura
Factor de potencia excesivo-nmero de fallos
Sobrecorriente-nmero de fallos
Potencia excesiva-nmero de fallos
Sobretensin-nmero de fallos
Sobrecarga trmica-nmero de fallos
Factor de potencia insuficiente-nmero de fallos
Infracorriente-nmero de fallos
Potencia insuficiente-nmero de fallos
Infratensin-nmero de fallos
Tensin-nmero de fallos de desequilibrio de fases
Tensin-nmero de fallos de prdida de fase
Tensin-nmero de fallos de inversin de fase
Contador de advertencias de proteccin
El parmetro Sobrecarga trmica-nmero de advertencias contiene el nmero total
de advertencias de la funcin de proteccin contra sobrecarga trmica.
Cuando se produce una advertencia, como una advertencia de sobrecarga trmica,
el controlador LTM R aumenta el valor del parmetro Advertencias-nmero.
Funciones de medicin y supervisin
72 1639505 06/2009
Contador de errores de comandos de control
Descripcin
Un fallo de diagnstico se produce cuando el controlador LTM R detecta alguno de
los siguientes errores de comandos de control:
Errores de Comprobacin del comando de arranque
Errores de Comprobacin del comando de parada
Errores de Verificacin de parada
Errores de Verificacin del funcionamiento del motor
Para obtener informacin acerca de estas funciones de comandos de control,
consulte Diagnstico de errores de comandos de control, pgina 56.
Contador de fallos de cableado
Descripcin
El parmetro Cableado-nmero de fallos contiene el nmero total de los siguientes
fallos de cableado que se han producido desde la ltima vez que se ejecut Borrar
histricos-comando:
Un fallo de cableado se puede desencadenar por:
Error de inversin de CT
Error de configuracin de fase
Error de cableado del sensor de temperatura del motor
Fallo de inversin de tensin de fase
Fallo de inversin de corrientes de fase
El controlador LTM R aumenta el valor del parmetro Cableado-nmero de fallos en
1 cada vez que se produce alguno de los 3 fallos mencionados anteriormente. Para
obtener informacin acerca de los errores de conexin y los fallos relacionados,
consulte Fallos de cableado, pgina 59.
Funciones de medicin y supervisin
1639505 06/2009 73
Contadores de prdida de comunicacin
Descripcin
Fallos detectados para las funciones de comunicacin siguientes:
Contadores de fallos internos
Descripcin
Fallos detectados para los fallos internos siguientes:
Contador Contiene
HMI-nmero de fallos de puerto El nmero de veces que se ha perdido la comunicacin a travs del
puerto HMI.
Puerto de red-nmero de fallos internos El nmero de fallos que ha experimentado el mdulo de red, notificados
por este al controlador LTM R.
Puerto de red-nmero de fallos de
configuracin
El nmero de fallos graves que ha experimentado el mdulo de red, sin
incluir los fallos internos del mdulo de red, notificados por este al
controlador LTM R.
Puerto de red-nmero de fallos El nmero de veces que se ha perdido la comunicacin a travs del
puerto de red.
Contador Contiene
Controlador-nmero de fallos
internos
El nmero de fallos internos graves y leves.
Para obtener informacin acerca de los fallos internos, consulte Controlador-fallo
interno, pgina 53.
Puerto interno-nmero de fallos El nmero de fallos internos de comunicacin del controlador LTM R, ms el
nmero de intentos sin xito de identificar el mdulo de comunicaciones de red.
Funciones de medicin y supervisin
74 1639505 06/2009
Historial de fallos
Historial de fallos
El controlador LTM R almacena un historial de datos propios que se registraron en
el momento de los 5 ltimos fallos detectados por el LTM R. Fallo n-0 contiene el
registro de fallos ms recientes, y fallo n-4 el registro de fallos ms antiguos
conservados.
Cada registro de fallos incluye:
Fallo-cdigo
Fecha y hora
Valor de los parmetros
Motor-relacin de corriente a plena carga (% de FLCmx)
Valor de mediciones
Nivel de capacidad trmica
Corriente media-relacin
Corriente L1, L2, L3-relacin
Corriente de tierra-relacin
Corriente a plena carga-mx.
Corriente-desequilibrio de fases
Tensin-desequilibrio de fases
Factor de potencia
Frecuencia
Motor-sensor de temperatura
Tensin media
Tensin L3-L1, Tensin L1-L2, Tensin L2-L3
Potencia activa
Funciones de medicin y supervisin
1639505 06/2009 75
2.4 Historial del motor
Descripcin general
El controlador LTM R realiza el seguimiento de los histricos de funcionamiento del
motor y los guarda.
El acceso a los histricos del motor se puede realizar mediante:
un PC con el software PowerSuite
un dispositivo HMI
un PLC a travs de un puerto de red
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Contadores de arranque del motor 76
Contador de arranques del motor por hora 76
Contador de descargas 77
Contadores de rearranque automtico 77
Motor-corriente del ltimo arranque 78
Motor-duracin del ltimo arranque 79
Tiempo de funcionamiento 79
Funciones de medicin y supervisin
76 1639505 06/2009
Contadores de arranque del motor
Descripcin
El controlador LTM R realiza el seguimiento de los arranques del motor y registra
los datos como histricos que se pueden recuperar para el anlisis del funciona-
miento. Es posible realizar el seguimiento de los siguientes histricos:
Motor-nmero de arranques
Motor-nmero de arranques L01 (arranques de la salida lgica O.1)
Motor-nmero de arranques L02 (arranques de la salida lgica O.2)
Borrar histricos-comando pone a 0 el parmetro Motor-nmero de arranques.
NOTA: Los parmetros Motor-nmero de arranques L01 y Motor-nmero de
arranques L02 no se pueden restablecer a cero, dado que los dos juntos indican el
uso de las salidas de rel a lo largo del tiempo.
Contador de arranques del motor por hora
Descripcin
El controlador LTM R realiza el seguimiento del nmero de arranques del motor
durante la pasada hora y registra esta cifra en el parmetro Motor-nmero de
arranques por hora.
El controlador LTM R suma los arranques en intervalos de 5 minutos con una
precisin de 1 intervalo (+0/5 minutos), lo que significa que el parmetro contendr
el nmero total de arranques en los 60 o los 55 minutos anteriores.
Esta funcin se utiliza como tarea de mantenimiento para evitar termoesfuerzo en
el motor.
Caractersticas
La funcin de arranques del motor por hora presenta las siguientes caractersticas:
Caracterstica Valor
Precisin 5 minutos (+0/5 minutos)
Resolucin 5 minutos
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
1639505 06/2009 77
Contador de descargas
Descripcin
El parmetro Descarga-nmero contiene el nmero de veces que se ha activado la
funcin de proteccin contra descargas desde la ltima vez que se ejecut Borrar
histricos-comando.
Para obtener informacin acerca de la funcin de proteccin contra descargas,
consulte Descarga, pgina 160.
Contadores de rearranque automtico
Descripcin
Existen 3 tipos de contadores:
Nmero de rearranques automticos inmediatos
Nmero de rearranques automticos con retardo
Nmero de rearranques automticos manuales
Para obtener informacin acerca de la funcin de proteccin de rearranque
automtico, consulte Rearranque automtico, pgina 163.
Funciones de medicin y supervisin
78 1639505 06/2009
Motor-corriente del ltimo arranque
Descripcin
El controlador LTM R mide el nivel de corriente mxima alcanzado durante el ltimo
arranque del motor y registra el valor en el parmetro Motor-corriente del ltimo
arranque para el anlisis del sistema con fines de mantenimiento.
Este valor tambin puede usarse para ayudar a configurar el parmetro de umbral
de arranque prolongado en la funcin de proteccin contra arranque prolongado.
El valor no se almacena en la memoria no voltil: se pierde al apagar y encender la
alimentacin.
Caractersticas
La funcin Motor-corriente del ltimo arranque presenta las siguientes
caractersticas:
Caracterstica Valor
Unidad % de FLC
Precisin +/-1% para modelos de 8 A y 27 A
+/-2% para modelos de 100 A
Resolucin 1% FLC
Intervalo de actualizacin 100 ms
Funciones de medicin y supervisin
1639505 06/2009 79
Motor-duracin del ltimo arranque
Descripcin
El controlador LTM R realiza el seguimiento de la duracin del ltimo arranque del
motor y notifica el valor en el parmetro Motor-duracin del ltimo arranque para el
anlisis del sistema en las tareas de mantenimiento.
Este valor tambin puede resultar muy til a la hora de fijar el tiempo sobrepasado
de arranque prolongado, utilizado en las funciones de proteccin contra sobrecarga
de disparo definitivo y arranque prolongado.
El valor no se almacena en la memoria no voltil: se pierde al apagar y encender la
alimentacin.
Caractersticas
La funcin de duracin del ltimo arranque presenta las siguientes caractersticas:
Tiempo de funcionamiento
Descripcin
El controlador LTM R realiza el seguimiento del tiempo de funcionamiento del motor
y registra el valor en el parmetro Tiempo de funcionamiento. Utilice esta
informacin como ayuda a la hora de programar las tareas de mantenimiento del
motor, como lubricacin, inspeccin y sustitucin.
Caracterstica Valor
Unidad s
Precisin +/1%
Resolucin 1 s
Intervalo de actualizacin 1 s
Funciones de medicin y supervisin
80 1639505 06/2009
2.5 Estado de funcionamiento del sistema
Descripcin general
El controlador LTM R supervisa el estado de funcionamiento del motor y el tiempo
mnimo de espera antes del rearranque del mismo:
El acceso a los estados del motor se puede realizar a travs de:
un PC con el software PowerSuite
un dispositivo HMI
un PLC a travs de un puerto de red
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Estado del motor 81
Mnimo-tiempo de espera 81
Funciones de medicin y supervisin
1639505 06/2009 81
Estado del motor
Descripcin
El controlador LTM R realiza el seguimiento del estado del motor y notifica los
siguientes estados mediante al ajuste de los parmetros booleanos
correspondientes:
Mnimo-tiempo de espera
Descripcin
El controlador LTM R realiza el seguimiento del tiempo que queda para rearrancar
el motor, de acuerdo con uno de los siguientes eventos:
rearme automtico (vase pgina 238)
sobrecarga trmica (vase pgina 91)
bloqueo de ciclo rpido (vase pgina 142)
descarga (vase pgina 160)
rearranque automtico (vase pgina 163)
tiempo de transicin
Si hay ms de un temporizador activo, el parmetro muestra el temporizador
mximo, que es el tiempo de espera mnimo a la respuesta al fallo o al rearme de
la funcin de control.
NOTA: Incluso con el LTM R apagado, se hace un seguimiento del tiempo durante
al menos 30 min.
Caractersticas
La funcin Mnimo-tiempo de espera presenta las siguientes caractersticas:
Estado del motor Parmetro
Marcha Motor-en marcha
Listo Sistema-listo
Arranque Motor-en arranque
Caracterstica Valor
Unidad s
Precisin +/1%
Resolucin 1 s
Intervalo de actualizacin 1 s
Funciones de medicin y supervisin
82 1639505 06/2009
1639505 06/2009 83
3
1639505 06/2009
Funciones de proteccin del
motor
Descripcin general
En este captulo se describen las funciones de proteccin del motor que
proporciona el controlador LTM R.
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
3.1 Introduccin a las funciones de proteccin del motor 84
3.2 Funciones de proteccin trmica y de corriente del motor 90
3.3 Funciones de proteccin de la tensin del motor 144
3.4 Funciones de proteccin de alimentacin del motor 169
Funciones de proteccin del motor
84 1639505 06/2009
3.1 Introduccin a las funciones de proteccin del
motor
Descripcin general
En esta seccin se presentan las funciones de proteccin del motor que
proporciona el controlador LTM R, junto con los parmetros y caractersticas de
proteccin.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Definiciones 85
Caractersticas de proteccin del motor 87
Funciones de proteccin del motor
1639505 06/2009 85
Definiciones
Funciones y datos predefinidos
El controlador LTM R supervisa los parmetros del sensor de temperatura del
motor, corriente de tierra y corriente. Cuando el controlador LTM R est conectado
a un mdulo de expansin, tambin supervisa los parmetros de tensin y de
potencia. El controlador LTM R utiliza estos parmetros en las funciones de
proteccin para detectar condiciones de fallo y advertencia. La respuesta del
controlador LTM R a dichas condiciones es fija en el caso de los modos de
funcionamiento predefinidos. La salida lgica O.4 se activa en caso de fallo, y la
salida lgica O.3 se activa cuando hay una advertencia. Para obtener ms
informacin acerca de los modos de funcionamiento predefinidos, consulte Modos
de funcionamiento, pgina 198.
Puede configurar estas funciones de proteccin del motor para detectar la
existencia de condiciones de funcionamiento no deseadas que, si no se resuelven,
podran causar daos al motor y al equipo.
Todas las funciones de proteccin del motor incluyen la deteccin de fallos, y la
mayora de ellas tambin incluyen la deteccin de advertencias.
Funciones y datos personalizados
Adems de utilizar las funciones de proteccin y los parmetros incluidos en un
modo de funcionamiento predefinido, puede emplear el editor de lgica
personalizada del software PowerSuite para crear un nuevo modo de funciona-
miento personalizado. Para crear un modo de funcionamiento personalizado,
seleccione un modo de funcionamiento predefinido y modifique su cdigo de
acuerdo con las necesidades de su aplicacin.
Con el editor de lgica personalizada, puede crear un modo de funcionamiento
personalizado de las siguientes maneras:
Modificando las respuestas del controlador LTM R a los fallos o advertencias de
proteccin.
Creando nuevas funciones, basadas en los parmetros predefinidos o recin
creados.
Funciones de proteccin del motor
86 1639505 06/2009
Fallos
Un fallo es una condicin de funcionamiento grave no deseada. En la mayora de
las funciones de proteccin se pueden configurar parmetros relacionados con los
fallos.
La respuesta del controlador LTM R a un fallo comprende lo siguiente:
Contactos de la salida O.4:
el contacto 95-96 est abierto
el contacto 97-98 est cerrado
El LED de fallo est encendido (rojo permanente).
Los bits del estado de fallo se establecen en un parmetro de fallo.
Se muestra un mensaje de texto en una pantalla HMI (si hay un dispositivo HMI
conectado).
Se muestra un indicador de estado de fallo en el software de configuracin, si
est conectado.
El controlador LTM R realiza un recuento y registra el nmero de fallos en cada
funcin de proteccin.
Una vez que se ha producido el fallo, no basta simplemente con resolver la
condicin subyacente para que el fallo desaparezca. Para borrar el fallo, es
necesario reiniciar el controlador LTM R. Consulte Introduccin a la gestin de
fallos, pgina 231.
Advertencias
Una advertencia es una condicin de funcionamiento que, aun siendo no deseada,
tiene un cariz menos grave. Una advertencia indica que para impedir que se
produzca una condicin problemtica podra ser necesaria una accin correctiva. Si
se deja sin resolver, la advertencia puede conducir a una condicin de fallo. En la
mayora de las funciones de proteccin se pueden configurar parmetros
relacionados con las advertencias.
La respuesta del controlador LTM R a una advertencia comprende lo siguiente:
La salida O.3 est cerrada.
El LED de fallo parpadea en rojo 2 veces por segundo.
Los bits del estado de advertencia se establecen en un parmetro de
advertencia.
Se muestra un mensaje de texto en una pantalla HMI (si hay un dispositivo HMI
conectado).
Se muestra un indicador de estado de advertencia en el software de
configuracin.
NOTA: En algunas funciones de proteccin, la deteccin de advertencias comparte
el mismo umbral que la de fallos. En otras funciones de proteccin, la deteccin de
advertencias tiene otro umbral.
El controlador LTM R borra la advertencia siempre que el valor medido ya no
exceda el umbral de advertencia, ms o menos un 5% de la banda de histresis.
Funciones de proteccin del motor
1639505 06/2009 87
Caractersticas de proteccin del motor
Funcionamiento
El siguiente diagrama describe el funcionamiento de una funcin tpica de
proteccin del motor. Este diagrama, y los siguientes, se expresan en trminos de
corriente. Sin embargo, los mismos principios se aplican a la tensin.
I Medida del parmetro supervisado
Is1 Umbral de advertencia
Is2 Umbral de fallo
T Tiempo sobrepasado de fallo
Inst Deteccin de advertencia/fallo instantnea
Parmetros
Algunas funciones de proteccin incluyen parmetros configurables, por ejemplo:
Umbral de fallo: un valor lmite del parmetro supervisado que activa un fallo de
la funcin de proteccin.
Umbral de advertencia: un valor lmite del parmetro supervisado que activa una
advertencia de la funcin de proteccin.
Tiempo sobrepasado de fallo: un retardo que debe vencer para que se active el
fallo de la funcin de proteccin. El comportamiento de un tiempo sobrepasado
depende de su perfil de caracterstica de curva de disparo.
Caracterstica de curva de disparo (TCC): El controlador LTM R incluye una
caracterstica de disparo definitivo para todas las funciones de proteccin,
excepto para la funcin de proteccin de trmica inversa de sobrecarga trmica,
que presenta una caracterstica de curva de disparo inverso y otra de disparo
definitivo, como se describe a continuacin:
Funciones de proteccin del motor
88 1639505 06/2009
TCC definida: la duracin del tiempo sobrepasado de fallo permanece constante
con independencia de los cambios en el valor de la cantidad (corriente) medida,
como se describe en el siguiente diagrama.
TCC inversa: la duracin del retardo vara en proporcin inversa al valor de la
cantidad (aqu, capacidad trmica) medida. Conforme la cantidad medida se
incrementa, tambin aumenta la posibilidad de daos, lo que hace, por tanto, que
la duracin del retardo disminuya, como se describe en el siguiente diagrama.
Funciones de proteccin del motor
1639505 06/2009 89
Histresis
Para aumentar la estabilidad, las funciones de proteccin del motor aplican un valor
de histresis que se aade a o se resta del lmite de umbral antes de que se reinicie
una respuesta de fallo o advertencia. El valor de histresis se calcula como un
porcentaje, normalmente del 5%, del lmite de umbral y:
Se resta del valor de umbral en caso de lmites de umbral superiores.
Se aade al valor de umbral en caso de lmites de umbral inferiores.
El siguiente diagrama describe el resultado lgico del procesamiento de medida
(Inst) cuando la histresis se aplica a un lmite de umbral superior:
d Porcentaje de histresis
Funciones de proteccin del motor
90 1639505 06/2009
3.2 Funciones de proteccin trmica y de corriente
del motor
Descripcin general
En esta seccin se describen las funciones de proteccin trmica y de corriente del
motor que proporciona el controlador LTM R.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Sobrecarga trmica 91
Sobrecarga trmica - Trmica inversa 92
Sobrecarga trmica - Tiempo definido 99
Desequilibrio de corrientes de fase 103
Prdida de corriente de fase 107
Inversin de corrientes de fase 110
Arranque prolongado 111
Agarrotamiento 114
Infracorriente 117
Sobrecorriente 120
Corriente de tierra 123
Corriente de tierra interna 124
Corriente de tierra externa 127
Sensor de temperatura del motor 130
Sensor de temperatura del motor - PTC binario 131
Motor-sensor de temperatura - PT100 133
Sensor de temperatura del motor - PTC analgico 136
Sensor de temperatura del motor - NTC analgico 139
Ciclo rpido-bloqueo 142
Funciones de proteccin del motor
1639505 06/2009 91
Sobrecarga trmica
Descripcin general
El controlador LTM R se puede configurar para proporcionar proteccin trmica;
para ello, es necesario seleccionar uno de los siguientes valores:
Trmica inversa (vase pgina 92) (predeterminado)
Tiempo definido (vase pgina 99)
Cada valor representa una caracterstica de curva de disparo. El controlador LTM R
almacena el valor seleccionado en su parmetro Sobrecarga trmica-modo. Slo se
puede activar un valor a la vez. Para obtener informacin acerca del funcionamiento
y la configuracin de cada valor, consulte los temas que vienen a continuacin.
Configuracin de parmetros
La funcin de sobrecarga trmica presenta los siguientes parmetros configurables,
que se aplican a cada caracterstica de curva de disparo:
Parmetros Intervalo de ajuste Ajuste de fbrica
Modo Trmica inversa
Tiempo definido
Trmica inversa
Activacin de fallo Activado/Desactivado Activado
Activacin de advertencia Activado/Desactivado Activado
Motor-refrigeracin por ventilador
auxiliar
Activado/Desactivado Desactivado
Funciones de proteccin del motor
92 1639505 06/2009
Sobrecarga trmica - Trmica inversa
Descripcin
Cuando el parmetro Sobrecarga trmica-modo est establecido en Trmica
inversa y se selecciona una clase de disparo de motor, el controlador LTM R
supervisa la capacidad trmica utilizada del motor e indica:
Una advertencia cuando la capacidad trmica utilizada supera un umbral de
advertencia configurado.
Un fallo cuando la capacidad trmica utilizada supera continuamente un umbral
de fallo calculado, segn el parmetro Motor-clase de disparo.
No existe un retardo de tiempo para la advertencia de sobrecarga trmica.
El controlador LTM R calcula el nivel de capacidad trmica en todos los estados de
funcionamiento. Cuando se pierde la corriente al controlador LTM R, este conserva
las ltimas mediciones del estado trmico del motor durante un perodo de 30
minutos, lo que permite volver a calcular dicho estado una vez restablecida la
corriente a dicho LTM R.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
ATENCIN
RIESGO DE SOBRECALENTAMIENTO DEL MOTOR
El parmetro Motor-clase de disparo se debe establecer de acuerdo con las
caractersticas de calentamiento del motor. Antes de configurar este parmetro,
consulte las instrucciones del fabricante del motor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
o daos en el equipo.
Funciones de proteccin del motor
1639505 06/2009 93
Rearme para rearranque de emergencia
Puede utilizar Borrar nivel de capacidad trmica-comando, que emite el PLC o un
dispositivo HMI, para rearrancar un motor sobrecargado en una situacin de
emergencia. Este comando pone a 0 el valor de utilizacin de la capacidad trmica
y omite el perodo de refrigeracin que necesita el modelo trmico para poder
rearrancar el motor.
Este comando tambin reinicia el parmetro Ciclo rpido-tiempo sobrepasado de
bloqueo para permitir un rearranque inmediato sin bloqueo.
Borrar todo-comando no lleva a cabo un borrado del nivel de capacidad trmica.
Borrar nivel de capacidad trmica-comando no reinicia la respuesta al fallo, sino
que:
Slo una accin externa al controlador LTM R (por ejemplo, una reduccin de la
carga del motor) puede borrar la condicin de fallo.
Slo un comando de rearme, del medio de restablecimiento vlido configurado
en el parmetro Fallo-modo de reinicio, reiniciar la respuesta al fallo.
ADVERTENCIA
PRDIDA DE PROTECCIN DEL MOTOR
Borrar el nivel de capacidad trmica anula la proteccin trmica, lo que puede
provocar que se sobrecaliente e incendie el equipo. El funcionamiento continuado
con la proteccin trmica anulada debe limitarse a aplicaciones en las que es
esencial el rearranque inmediato.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
Un comando de rearme puede rearrancar el motor si el controlador LTM R se
utiliza en un circuito de control de 2 hilos.
El funcionamiento del equipo debe guardar conformidad con los cdigos y
normativas de seguridad nacionales y locales.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Funciones de proteccin del motor
94 1639505 06/2009
Funcionamiento
La funcin de proteccin trmica inversa de sobrecarga trmica se basa en el
modelo trmico del motor que combina 2 imgenes trmicas:
una imagen de cobre que representa el estado trmico de los devanados
estatrico y rotrico, y
una imagen de hierro que representa el estado trmico del bastidor del motor.
Si se utiliza la corriente medida y el valor de la clase de disparo del motor de
entrada, al calcular la capacidad trmica utilizada por el motor, el controlador LTM R
slo tiene en cuenta el estado trmico ms alto, hierro o cobre, como se describe a
continuacin:
Valor trmico
fe Umbral de disparo de hierro
cu Umbral de disparo de cobre
t Tiempo
Funciones de proteccin del motor
1639505 06/2009 95
Cuando se selecciona el modo de fallo de trmica inversa, el parmetro Nivel de
capacidad trmica, que indica la capacidad trmica utilizada debido a la corriente
de carga, se incrementa durante los estados de arranque y marcha. Cuando el
controlador LTM R detecta que el nivel de capacidad trmica () supera el umbral
de fallo (s), activa un fallo de sobrecarga trmica, como se describe a
continuacin:
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente. El controlador LTM R borra un fallo o advertencia de sobrecarga
trmica cuando la capacidad trmica utilizada desciende por debajo del 95% del
umbral.
Funciones de proteccin del motor
96 1639505 06/2009
Caractersticas funcionales
Las funciones de trmica inversa de sobrecarga trmica incluyen las siguientes
caractersticas:
1 clase de disparo del motor:
Motor-clase de disparo
4 umbrales configurables:
Motor-relacin de corriente a plena carga (FLC1)
Motor-relacin de corriente a plena carga y alta velocidad (FLC2)
Sobrecarga trmica-umbral de advertencia
sobrecarga trmica-umbral de reinicio tras fallo
2 salidas de funcin:
Sobrecarga trmica-advertencia
Sobrecarga trmica-fallo
2 contadores:
Sobrecarga trmica-nmero de fallos
Sobrecarga trmica-nmero de advertencias
1 parmetro para un ventilador auxiliar de refrigeracin del motor externo:
Motor-refrigeracin por ventilador auxiliar
1 medida de la capacidad trmica utilizada:
Nivel de capacidad trmica
NOTA: En el caso de los controladores LTM R configurados para el modo de
funcionamiento predefinido de 2 velocidades, se utilizan dos umbrales de fallo:
FLC1 y FLC2.
Funciones de proteccin del motor
1639505 06/2009 97
Diagrama de bloques
Imx Corriente mxima
mx Nivel de capacidad trmica
s1 Sobrecarga trmica-umbral de advertencia
Configuracin de parmetros
Las funciones de trmica inversa de sobrecarga trmica presentan los siguientes
parmetros configurables:
Las funciones de trmica inversa de sobrecarga trmica presentan los siguientes
parmetros no configurables:
Parmetros Intervalo de ajuste Ajuste de fbrica
FLC1, FLC2 0,4...8,0 A en incrementos de 0,08 A para LTMR08
1,35...27,0 A en incrementos de 0,27 A para LTMR27
5...100 A en incrementos de 1 A para LTMR100
0,4 A para LTMR08
1,35 A para LTMR27
5 A para LTMR100
Umbral de advertencia 10...100% de capacidad trmica 85% de capacidad trmica
Motor-clase de disparo 5...30 en incrementos de 5 5
Tiempo sobrepasado de
reinicio tras fallo
50...999 en incrementos de 1s 120 s
Umbral de rearme tras
fallo
35...95% de capacidad trmica 75% de capacidad trmica
Parmetro Ajuste fijo
Sobrecarga trmica-umbral de fallo 100% de capacidad trmica
Funciones de proteccin del motor
98 1639505 06/2009
Caractersticas tcnicas
Las funciones de trmica inversa de sobrecarga trmica presentan las siguientes
caractersticas:
Caractersticas Valor
Histresis 5% de sobrecarga trmica-umbral de advertencia
Precisin del tiempo de
disparo
+/0,1 s
Funciones de proteccin del motor
1639505 06/2009 99
Sobrecarga trmica - Tiempo definido
Descripcin
Cuando el parmetro Sobrecarga trmica-modo est establecido en Tiempo
definido, el controlador LTM R indica:
Una advertencia cuando la corriente de fase mxima medida supera un umbral
configurable (OC1 u OC2).
Un fallo cuando la corriente de fase mxima supera constantemente el mismo
umbral (OC1 u OC2) durante un retardo de tiempo definido.
El fallo de tiempo definido de sobrecarga trmica incluye un retardo de tiempo de
magnitud constante, seguido de un comando de arranque, antes de que se active
la proteccin y una duracin del tiempo sobrepasado de fallo, como se describe a
continuacin:
Is Umbral de fallo y advertencia (OC1 u OC2)
T1 Comando de arranque
T2 Retardo de tiempo transcurrido
No existe un retardo de tiempo para la advertencia de tiempo definido de
sobrecarga trmica.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Funciones de proteccin del motor
100 1639505 06/2009
La funcin de proteccin de tiempo definido se desactiva despus de un arranque
debido a un retardo definido en el parmetro Arranque prolongado-tiempo
sobrepasado de fallo. El controlador LTM R, cuando se configura para el modo de
funcionamiento predefinido de sobrecarga, emplea el cambio de estado del nivel de
corriente de desactivado a activado para comenzar el estado de arranque. Este
retardo permite que el motor, al arrancar, reciba la corriente que necesita para
superar la inercia causada por el estado de reposo.
NOTA: La configuracin de esta funcin de proteccin requiere la configuracin de
la funcin de proteccin contra arranque prolongado, junto con el parmetro
Arranque prolongado-tiempo sobrepasado de fallo.
Caractersticas funcionales
La funcin de tiempo definido de sobrecarga trmica incluye las siguientes
caractersticas:
2 umbrales configurables; uno (OC1) se utiliza para motores de una velocidad, y
los dos son necesarios para motores de 2 velocidades:
OC1 (Motor-relacin de corriente a plena carga) o
OC2 (Motor-relacin de corriente a plena carga y alta velocidad)
1 temporizador:
Tiempo de sobrecorriente (Tiempo-S, establecido a travs del parmetro
Sobrecarga trmica-tiempo sobrepasado definitivo de fallo)
2 salidas de funcin:
Advertencia de sobrecarga trmica
Fallo de sobrecarga trmica
2 contadores:
Sobrecarga trmica-nmero de fallos
Sobrecarga trmica-nmero de advertencias
Funciones de proteccin del motor
1639505 06/2009 101
Diagrama de bloques
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Is Umbral de fallo y advertencia (OC1 u OC2)
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de tiempo definido de sobrecarga trmica presenta los siguientes
parmetros configurables:
Parmetros Intervalo de ajuste Ajuste de
fbrica
Umbral de fallo:
Motor-relacin de corriente a plena carga (OC1)
- o -
Motor-relacin de corriente a plena carga y alta
velocidad (OC2)
5...100% de FLCmx, en incrementos del
1%
Nota: OC1 y OC2 se pueden ajustar
directamente en amperios, en el men de
ajustes de un dispositivo HMI o en la
opcin de configuracin del software
PowerSuite.
5% FLCmx
Sobrecarga trmica-tiempo sobrepasado definitivo
de fallo (Tiempo-S o tiempo de sobrecorriente)
1...300 s en incrementos de 1 s 10 s
Sobrecarga trmica-umbral de advertencia 20...800% de OC en incrementos del 1% 80% de OC
Arranque prolongado-tiempo sobrepasado de fallo
(1)
(Retardo [R])
1...200 s en incrementos de 1 s 10 s
(1) La funcin de tiempo definido de sobrecarga trmica requiere el uso simultneo de la funcin de proteccin del
motor contra arranque prolongado, funciones que emplean el parmetro Arranque prolongado-tiempo sobrepasado
de fallo.
Funciones de proteccin del motor
102 1639505 06/2009
Caractersticas tcnicas
La funcin de tiempo definido de sobrecarga trmica incluye las siguientes
caractersticas:
Ejemplo
El siguiente diagrama muestra un fallo de tiempo definido de sobrecarga trmica:
OC Umbral de fallo (OC1 u OC2)
Caractersticas Valor
Histresis 5% de los umbrales de fallo y advertencia
Precisin del tiempo de
disparo
+/0,1 s
Funciones de proteccin del motor
1639505 06/2009 103
Desequilibrio de corrientes de fase
Descripcin
La funcin Corriente-desequilibrio de fases indica:
Una advertencia cuando la corriente de una fase difiere de la corriente media en
ms de un porcentaje definido en las 3 fases.
Un fallo cuando la corriente de una fase difiere de la corriente media en las 3
fases en ms de un porcentaje establecido de forma independiente durante un
perodo de tiempo definido.
NOTA: Utilice esta funcin para detectar y protegerse contra los desequilibrios de
corrientes de fase ms pequeos. En el caso de desequilibrios grandes, ms del
80% de la corriente media en todas las fases, utilice la funcin de proteccin del
motor de prdida de fase de corriente.
Esta funcin presenta dos temporizadores de fallo ajustables:
uno se aplica a los desequilibrios de corriente que tienen lugar mientras el motor
se encuentra en estado de arranque, y
el otro se aplica a los desequilibrios de corriente que se producen despus del
arranque, mientras el motor est en estado de marcha
Ambos temporizadores se inician si el desequilibrio se detecta en estado de
arranque.
La funcin identifica la fase que provoca un desequilibrio de corriente. Si la
desviacin mxima de la corriente media en las 3 fases es la misma en dos fases,
la funcin identifica ambas fases.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin slo se aplica a los motores trifsicos.
ATENCIN
RIESGO DE SOBRECALENTAMIENTO DEL MOTOR
El parmetro Corriente-umbral de fallo de desequilibrio de fases se debe
configurar de manera adecuada con el fin de proteger el cableado y el equipo del
motor de los daos ocasionados por el sobrecalentamiento del motor.
El valor que introduzca debe guardar conformidad con los cdigos y normativas
de seguridad nacionales y locales.
Antes de configurar este parmetro, consulte las instrucciones del fabricante
del motor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
o daos en el equipo.
Funciones de proteccin del motor
104 1639505 06/2009
Caractersticas funcionales
La funcin de desequilibrio de corrientes de fase incluye las siguientes
caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
2 temporizadores de fallo:
Tiempo sobrepasado de fallo en el arranque
Tiempo sobrepasado de fallos en marcha
2 salidas de funcin:
Corriente-advertencia de desequilibrio de fases
Corriente-fallo de desequilibrio de fases
1 contador:
Corriente-nmero de fallos de desequilibrio de fases
3 indicadores que identifican la fase o fases con el desequilibrio de corriente
superior:
Corriente L1-desequilibrio superior
Corriente L2-desequilibrio superior
Corriente L3-desequilibrio superior
Funciones de proteccin del motor
1639505 06/2009 105
Diagrama de bloques
Advertencia y fallo de desequilibrio de corrientes de fase:
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Ides Relacin de desequilibrio de corriente para 3 fases
Is1 Umbral de advertencia
Is2 Umbral de fallo
T1 Tiempo sobrepasado de fallo en el arranque
T2 Tiempo sobrepasado de fallo en marcha
Configuracin de parmetros
La funcin de desequilibrio de corrientes de fase incluye los siguientes parmetros:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Activado
Tiempo sobrepasado de fallo en el
arranque
0,2...20 s en incrementos de 0,1 s 0,7 s
Tiempo sobrepasado de fallo en
marcha
0,2...20 s en incrementos de 0,1 s 5 s
Umbral de fallo 10...70% del desequilibrio calculado en incrementos del
1%
10%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 10...70% del desequilibrio calculado en incrementos del
1%
10%
Funciones de proteccin del motor
106 1639505 06/2009
Caractersticas tcnicas
La funcin de desequilibrio de corrientes de fase presenta las siguientes
caractersticas:
Ejemplo
El siguiente diagrama muestra la deteccin de un desequilibrio de corrientes de fase
durante el estado de marcha.
I Diferencia de porcentaje entre la corriente en cualquier fase y la corriente media en las 3
fases
Is2 Umbral de fallo
Caractersticas Valor
Histresis 5% del umbral de fallo o advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 107
Prdida de corriente de fase
Descripcin
La funcin de prdida de corriente de fase indica:
Una advertencia cuando la corriente de una fase difiere de la corriente media en
ms de un 80% en las 3 fases.
Un fallo cuando la corriente de una fase difiere de la corriente media en ms del
80% en las 3 fases durante un perodo de tiempo definido.
NOTA: Utilice esta funcin para detectar y protegerse contra los desequilibrios de
corrientes de fase grandes (ms del 80% de la corriente media en las 3 fases). En
el caso de desequilibrios de corriente ms pequeos, utilice la funcin de proteccin
del motor contra desequilibrios de corrientes de fase.
Esta funcin presenta un solo retardo ajustable, que se aplica cuando el motor se
encuentra en estado de arranque o de marcha.
La funcin identifica la fase que experimenta una prdida de corriente. Si la
desviacin mxima respecto a la corriente media en las 3 fases es la misma en 2
fases, la funcin identifica ambas fases.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin slo se aplica a los motores trifsicos.
Caractersticas funcionales
La funcin de prdida de corriente de fase incluye las siguientes caractersticas:
1 umbral de advertencia y fallo fijo igual al 80% de la corriente media en las 3
fases
1 temporizador de fallo:
Corriente-tiempo sobrepasado de prdida de fase
2 salidas de funcin:
Corriente-advertencia de prdida de fase
Corriente-fallo de prdida de fase
1 contador:
Corriente-nmero de fallos de prdida de fase
3 indicadores que identifican la fase o fases que experimentan la prdida de
corriente:
Prdida de corriente L1
Prdida de corriente L2
Prdida de corriente L3
Funciones de proteccin del motor
108 1639505 06/2009
Diagrama de bloques
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Ln Nmero o nmeros de lnea de corriente con la desviacin ms grande con respecto a
Imed
Imed Corriente media 3 fases
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de prdida de corriente de fase presenta los siguientes parmetros
configurables:
Caractersticas tcnicas
La funcin de prdida de corriente de fase presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Activado
Tiempo sobrepasado 0,1...30 s en incrementos de 0,1 s 3 s
Activacin de advertencia Activado/Desactivado Activado
Caractersticas Valor
Histresis 75% de la corriente media en las 3 fases
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 109
Ejemplo
El siguiente diagrama muestra un fallo de prdida de corriente de fase de un motor
en estado de marcha.
%I Diferencia de porcentaje entre la corriente en cualquier fase y la corriente media en las 3
fases
Funciones de proteccin del motor
110 1639505 06/2009
Inversin de corrientes de fase
Descripcin
La funcin de inversin de corrientes de fase indica un fallo cuando detecta que las
corrientes de fase de un motor trifsico no estn en secuencia con el parmetro
Motor-secuencia de fases, ABC o ACB.
NOTA: Cuando el controlador LTM R est conectado a un mdulo de expansin, la
proteccin contra inversin de fases se basa en la secuencia de fases de tensin
antes de que el motor arranque, y en la secuencia de corrientes de fase una vez
que arranca.
Esta funcin:
Se activa cuando el motor se encuentra en estado de arranque o de marcha.
Slo se aplica a los motores trifsicos.
No tiene advertencias ni temporizadores.
Esta funcin se puede activar o desactivar.
Caractersticas funcionales
La funcin de inversin de corrientes de fase aade un contador, Cableado-nmero
de fallos.
Configuracin de parmetros
La funcin de inversin de corrientes de fase presenta los siguientes parmetros
configurables:
Caractersticas tcnicas
La funcin de inversin de corrientes de fase presenta las siguientes
caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Secuencia de fases A-B-C
A-C-B
A-B-C
Caracterstica Valor
Tiempo de disparo en el arranque del motor En 0,2 s del arranque del motor
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 111
Arranque prolongado
Descripcin
La funcin de arranque prolongado detecta un rotor bloqueado o calado en estado
de arranque e indica un fallo cuando la corriente supera constantemente un umbral
definido de forma independiente durante el mismo perodo de tiempo.
Cada modo de funcionamiento predefinido tiene su propio perfil de corriente, que
representa un ciclo de arranque satisfactorio del motor. El controlador LTM R
detecta una condicin de fallo por arranque prolongado cada vez que el perfil de
corriente actual, que tiene lugar tras un comando de arranque, vara con respecto
al perfil esperado.
La supervisin de fallos se puede activar o desactivar de forma independiente.
Esta funcin no tiene advertencia.
Ciclo de arranque
El controlador LTM R utiliza los parmetros configurables de la funcin de
proteccin contra arranque prolongado, Arranque prolongado-umbral de fallo y
Arranque prolongado-tiempo sobrepasado de fallo, al definir y detectar el ciclo de
arranque del motor. Consulte Ciclo de arranque, pgina 194.
Caractersticas funcionales
La funcin de arranque prolongado incluye las siguientes caractersticas:
1 umbral:
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
1 salidas de funcin:
Arranque prolongado-fallo
1 contador:
Arranque prolongado-nmero de fallos
Funciones de proteccin del motor
112 1639505 06/2009
Diagrama de bloques
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Is2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de arranque prolongado presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de arranque prolongado presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Activado
Tiempo sobrepasado de fallo 1...200 s en incrementos de 1 s 10 s
Umbral de fallo 100...800% de FLC 100% de FLC
Caracterstica Valor
Histresis 5% del umbral de fallo
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 113
Ejemplo
El siguiente diagrama muestra un fallo por arranque prolongado cuando se ha
superado el umbral:
Is2 Arranque prolongado-umbral de fallo
Funciones de proteccin del motor
114 1639505 06/2009
Agarrotamiento
Descripcin
La funcin de agarrotamiento detecta un rotor bloqueado durante el estado de
marcha e indica:
Una advertencia cuando la corriente en una fase supera un umbral establecido,
una vez que el motor ha alcanzado el estado de marcha.
Un fallo cuando la corriente en una fase supera constantemente un umbral
establecido de forma independiente durante un perodo de tiempo definido, una
vez que el motor ha alcanzado el estado de marcha.
La funcin de agarrotamiento se activa cuando el motor se bloquea durante el
estado de marcha y se para, o de repente se sobrecarga y recibe demasiada
corriente.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de agarrotamiento incluye las siguientes caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Advertencia de agarrotamiento
Agarrotamiento-fallo
1 contador:
Agarrotamiento-nmero de fallos
Funciones de proteccin del motor
1639505 06/2009 115
Diagrama de bloques
Advertencia y fallo de agarrotamiento:
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Is1 Umbral de advertencia
Is2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de agarrotamiento presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de agarrotamiento presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Activado
Tiempo sobrepasado de fallo 1...30 s en incrementos de 1 s 5 s
Umbral de fallo 100...800% de FLC en incrementos del 1% 200% de FLC
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 100...800% de FLC en incrementos del 1% 200% de FLC
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
116 1639505 06/2009
Ejemplo
El siguiente diagrama muestra un fallo por agarrotamiento.
Is2 Umbral de fallo por agarrotamiento
Funciones de proteccin del motor
1639505 06/2009 117
Infracorriente
Descripcin
La funcin de infracorriente indica:
Una advertencia cuando la corriente media en las 3 fases desciende por debajo
de un umbral establecido, una vez que el motor ha alcanzado el estado de
marcha.
Un fallo cuando la corriente media en las 3 fases desciende y permanece por
debajo de un umbral establecido de forma independiente durante un periodo de
tiempo definido, una vez que el motor ha alcanzado el estado de marcha.
La funcin de infracorriente se activa cuando la corriente del motor desciende por
debajo del nivel deseado para la carga arrastrada, por ejemplo, si la correa o el eje
de transmisin se ha roto. Esto permite que el motor marche en vaco en lugar de
bajo carga. Esta funcin presenta un solo temporizador de fallo. La supervisin de
fallos y advertencias se puede activar o desactivar de forma independiente.
Caractersticas funcionales
La funcin de infracorriente incluye las siguientes caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Advertencia de infracorriente
Fallo de infracorriente
1 contador:
Infracorriente-nmero de fallos
Funciones de proteccin del motor
118 1639505 06/2009
Diagrama de bloques
Advertencia y fallo de infracorriente:
Imed Corriente media
Is1 Umbral de advertencia
Is2 Umbral de fallo
T Retardo del temporizador de fallos
Configuracin de parmetros
La funcin de infracorriente presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de infracorriente presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...200 s en incrementos de 1 s 1 s
Umbral de fallo 30...100% de FLC en incrementos del
1%
50% de FLC
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 30...100% de FLC en incrementos del
1%
50% de FLC
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 119
Ejemplo
El siguiente diagrama muestra un fallo de infracorriente.
Is2 Umbral de fallo de infracorriente
Funciones de proteccin del motor
120 1639505 06/2009
Sobrecorriente
Descripcin
La funcin de sobrecorriente indica:
Una advertencia cuando la corriente en una fase supera un umbral establecido,
una vez que el motor ha alcanzado el estado de marcha.
Un fallo cuando la corriente en una fase supera constantemente un umbral
establecido de forma independiente durante un perodo de tiempo definido, una
vez que el motor ha alcanzado el estado de marcha.
La funcin de sobrecorriente se puede activar cuando el equipo est sobrecargado
o si se detecta una condicin de proceso que hace que la corriente aumente por
encima del umbral establecido. Esta funcin presenta un solo temporizador de fallo.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de sobrecorriente incluye las siguientes caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Sobrecorriente-advertencia
Sobrecorriente-fallo
1 contador:
Sobrecorriente/nmero de fallos
Funciones de proteccin del motor
1639505 06/2009 121
Diagrama de bloques
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
Is1 Umbral de advertencia
Is2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de sobrecorriente presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de sobrecorriente presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...250 s en incrementos de 1 s 10 s
Umbral de fallo 20...800% de FLC en incrementos del
1%
80% de FLC
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 20...800% de FLC en incrementos del
1%
80% de FLC
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
122 1639505 06/2009
Ejemplo
El siguiente diagrama muestra un fallo de sobrecorriente.
Is2 Umbral de fallo de sobrecorriente
Funciones de proteccin del motor
1639505 06/2009 123
Corriente de tierra
Descripcin general
El controlador LTM R se puede configurar para detectar la corriente de tierra:
De forma interna, sumando las seales de corriente trifsica del secundario de
los transformadores de corriente interna (vase pgina 124).
De forma externa, midiendo la corriente proporcionada por el secundario de un
transformador de corriente de fallo a tierra externa (vase pgina 127).
Utilice el parmetro Corriente de tierra-modo para seleccionar la proteccin de fallos
a tierra interna o externa. Los parmetros de modo de corriente de tierra slo se
pueden activar de uno en uno.
Configuracin de parmetros
La funcin de proteccin de corriente de tierra presenta los siguientes parmetros
configurables, que se aplican a la proteccin de corriente de tierra interna y externa:
Parmetros Intervalo de ajuste Ajuste de fbrica
Corriente de tierra-modo Interna
Externa
Interna
Activacin de fallo Activado/Desactivado Activado
Activacin de advertencia Activado/Desactivado Activado
Funciones de proteccin del motor
124 1639505 06/2009
Corriente de tierra interna
Descripcin
La funcin de corriente de tierra interna se activa cuando el parmetro Corriente de
tierra-modo est establecido en Interna y se desactiva cuando est establecido en
Externa.
La funcin de corriente de tierra interna suma las lecturas de corriente por parte del
secundario de los transformadores de corriente interna e indica:
Una advertencia, cuando la corriente sumada supera un umbral establecido.
Un fallo, cuando la corriente sumada supera constantemente un umbral
establecido de forma independiente durante un perodo de tiempo definido.
Esta funcin presenta un solo temporizador de fallo.
La funcin de corriente de tierra interna se puede activar cuando el motor est en
estado listo, de arranque o de marcha. Cuando el controlador LTM R funciona en
modo personalizado, esta funcin se puede configurar para que se desactive
durante el estado de arranque y se active slo durante el estado listo o de marcha.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
PELIGRO
DETECCIN INADECUADA DE FALLOS
La funcin de corriente de tierra interna no proteger a las personas de los daos
ocasionados por la corriente de tierra.
Para proteger el motor y el equipo relacionado, ser necesario establecer los
umbrales de fallo a tierra.
La configuracin de fallo a tierra debe guardar conformidad con los cdigos y
normativas de seguridad nacionales y locales.
Si no se siguen estas instrucciones provocar lesiones graves o incluso la
muerte.
Funciones de proteccin del motor
1639505 06/2009 125
Caractersticas funcionales
La funcin de corriente de tierra interna incluye las siguientes caractersticas:
1 medida de la corriente de tierra en amperios:
Corriente de tierra
1 medida de la corriente de tierra como un % de FLCmn:
Corriente de tierra-relacin
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Advertencia de corriente de tierra interna
Fallo de corriente de tierra interna
1 contador:
Corriente de tierra-nmero de fallos
Diagrama de bloques
I1 Corriente fase 1
I2 Corriente fase 2
I3 Corriente fase 3
I Corriente sumada
Is1 Umbral de advertencia
Is2 Umbral de fallo
T Tiempo sobrepasado de fallo
Funciones de proteccin del motor
126 1639505 06/2009
Configuracin de parmetros
La funcin de corriente de tierra interna incluye los siguientes parmetros:
Caractersticas tcnicas
La funcin de corriente de tierra interna presenta las siguientes caractersticas:
Ejemplo
El siguiente diagrama muestra un fallo de corriente de tierra interna durante el
estado de marcha.
Is2 Corriente de tierra interna-umbral de fallo
Parmetros Intervalo de ajuste Ajuste de fbrica
Corriente de tierra interna-tiempo sobrepasado de fallo 0,5...25 s en incrementos de
0,1 s
1 s
Corriente de tierra interna-umbral de fallo 20...500% de FLCmn en
incrementos del 1%
30% de FLCmn
Corriente de tierra interna-umbral de advertencia 20...500% de FLCmn en
incrementos del 1%
30% de FLCmn
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 127
Corriente de tierra externa
Descripcin
La funcin de corriente de tierra externa se activa cuando:
el parmetro Corriente de tierra-modo est establecido en Externa, y
se ha definido una relacin de transformacin de corriente.
Cuando el parmetro Corriente de tierra-modo est establecido en Interna, la
funcin de corriente de tierra externa est desactivada.
El controlador LTM R dispone de dos terminales, Z1 y Z2, que se pueden conectar
a un transformador de corriente de tierra externa. La funcin de corriente de tierra
externa mide la corriente de tierra proporcionada por el secundario del
transformador de corriente externa e indica:
Una advertencia, cuando la corriente proporcionada supera un umbral
establecido.
Un fallo, cuando la corriente proporcionada supera constantemente un umbral
establecido de forma independiente durante un perodo de tiempo definido.
Esta funcin presenta un solo temporizador de fallo.
La funcin de corriente de tierra externa se puede activar cuando el motor est en
estado listo, de arranque o de marcha. Cuando el controlador LTM R funciona en
modo personalizado, esta funcin se puede configurar para que se desactive slo
durante el estado de arranque y se active durante el estado listo o de marcha.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
PELIGRO
DETECCIN INADECUADA DE FALLOS
La funcin de corriente de tierra externa no proteger a las personas de los daos
ocasionados por la corriente de tierra.
Para proteger el motor y el equipo relacionado, ser necesario establecer los
umbrales de fallo a tierra.
La configuracin de fallo a tierra debe guardar conformidad con los cdigos y
normativas de seguridad nacionales y locales.
Si no se siguen estas instrucciones provocar lesiones graves o incluso la
muerte.
Funciones de proteccin del motor
128 1639505 06/2009
Caractersticas funcionales
La funcin de corriente de tierra externa incluye las siguientes caractersticas:
1 medida de la corriente de tierra en amperios:
Corriente de tierra
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Advertencia de corriente de tierra externa
Fallo de corriente de tierra externa
1 contador:
Corriente de tierra-nmero de fallos
Diagrama de bloques
Iti Corriente de tierra desde el CT de tierra
Iti s1 Umbral de advertencia
Iti s2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de corriente de tierra externa incluye los siguientes parmetros:
Parmetros Intervalo de ajuste Ajuste de fbrica
Corriente de tierra externa-tiempo sobrepasado de fallo 0,1...25 s en incrementos de
0,01 s
0,5 s
Corriente de tierra externa-umbral de fallo 0,02...10 A en incrementos de
0,01 A
1 A
Corriente de tierra externa-umbral de advertencia 0,02...10 A en incrementos de
0,01 A
1 A
Funciones de proteccin del motor
1639505 06/2009 129
Caractersticas tcnicas
La funcin de corriente de tierra externa presenta las siguientes caractersticas:
Ejemplo
El siguiente diagrama muestra un fallo de corriente de tierra externa durante el
estado de marcha.
Iti s2 Corriente de tierra externa-umbral de fallo
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
130 1639505 06/2009
Sensor de temperatura del motor
Descripcin general
El controlador TM R dispone de 2 terminales, T1 y T2, que se pueden conectar a un
elemento sensor de temperatura del motor para proporcionar proteccin para los
devanados del motor. El sensor de temperatura detecta las condiciones de alta
temperatura que podran conducir a daos o degradaciones.
Estas protecciones se activan cuando el parmetro Motor-tipo de sensor de
temperatura est establecido en uno de los siguientes valores:
PTC binario (vase pgina 131)
PT100 (vase pgina 133)
PTC analgico (vase pgina 136)
NTC analgico (vase pgina 139)
Estos elementos de proteccin del motor slo se pueden activar de uno en uno.
NOTA: La proteccin del sensor de temperatura del motor se mide en ohmios. Los
umbrales de proteccin de PTC binario estn predefinidos segn los estndares
IEC y no son configurables. Las funciones de proteccin de PTC analgico y NTC
analgico pueden requerir que escale el valor de resistencia al nivel de umbral
correspondiente en grados, en funcin de las propiedades del elemento sensor
seleccionado.
Cuando cambia el tipo de sensor, la configuracin del sensor de temperatura del
motor del controlador LTM R vuelve a sus valores predeterminados. Si un tipo de
sensor se sustituye por otro del mismo tipo, los valores de configuracin se
conservan.
Configuracin de parmetros
La funcin de sensor de temperatura del motor presenta los siguientes parmetros
configurables, que se aplican al tipo de sensor de temperatura del motor
seleccionado:
Parmetros Intervalo de ajuste Ajuste de fbrica
Tipo de sensor Ninguno
PTC binario
PT100
PTC analgico
NTC analgico
Ninguno
Activacin de fallo Activado/Desactivado Desactivado
Activacin de temperatura Activado/Desactivado Desactivado
Funciones de proteccin del motor
1639505 06/2009 131
Sensor de temperatura del motor - PTC binario
Descripcin
La funcin de sensor de temperatura del motor PTC binario se activa cuando el
parmetro Motor-tipo de sensor de temperatura est establecido en PTC binario y
el controlador LTM R est conectado a un termistor PTC (coeficiente positivo de
temperatura) binario integrado en el motor.
El controlador LTM R supervisa el estado del elemento sensor de temperatura del
motor e indica:
Una advertencia cuando la resistencia medida supera un umbral fijo.
Un fallo cuando la resistencia medida supera el mismo umbral fijo.
Las condiciones de fallo y advertencia continan hasta que la resistencia medida
desciende por debajo de otro umbral fijo de reconexin del sensor de temperatura
del motor.
Los umbrales de fallo del sensor de temperatura del motor vienen predefinidos de
fbrica y no se pueden configurar. La supervisin de fallos se puede activar o
desactivar.
La funcin esta disponible para todos los estados de funcionamiento.
Caractersticas funcionales
La funcin de sensor de temperatura del motor PTC binario presenta las siguientes
caractersticas:
2 salidas de funcin:
Motor-advertencia de sensor de temperatura
Motor-fallo de sensor de temperatura
1 contador:
Motor-nmero de fallos de sensor de temperatura
Diagrama de bloques
Resistencia del elemento sensor de temperatura
Funciones de proteccin del motor
132 1639505 06/2009
Configuracin de parmetros
La funcin de sensor de temperatura del motor PTC binario presenta los siguientes
parmetros configurables:
Caractersticas tcnicas
La funcin de sensor de temperatura del motor PTC binario presenta las siguientes
caractersticas:
Ejemplo
El siguiente diagrama muestra un fallo del sensor de temperatura del motor con
PTC binario con un rearme automtico:
2900 Umbral de fallo
1575 Umbral de reconexin de fallo
Rearme Marca el tiempo tras el que se puede ejecutar un rearme. Para que el estado de
marcha pueda reanudarse se necesita un comando de arranque. En este ejemplo, se ha
activado el rearme automtico.
Parmetro Ajustes fijos Precisin
Umbral de fallo/advertencia 2900 +/2%
Umbral de reconexin de fallo/advertencia 1575 +/2%
Caracterstica Valor
Tiempo de deteccin 0,5...0,6 s
Precisin del tiempo de deteccin +/0,1 s
Funciones de proteccin del motor
1639505 06/2009 133
Motor-sensor de temperatura - PT100
Descripcin
La funcin de deteccin de temperatura del motor PT100 se activa cuando el
parmetro Motor-tipo de sensor de temperatura est establecido en PT100 y el
controlador LTM R est conectado a un sensor PT100 integrado en el motor.
El controlador LTM R supervisa el estado del elemento sensor de temperatura del
motor e indica:
Una advertencia cuando la temperatura medida supera un umbral de advertencia
configurable.
Un fallo cuando la temperatura medida supera un umbral de fallo definido de
forma independiente.
El controlador LTM R mide la temperatura directamente con un sensor PT100. La
temperatura medida por el sensor PT100, bien en C (predeterminado), bien en F,
se muestra en HMI o PowerSuite, en funcin del parmetro Motor-visualizacin
grados CF de sensor de temperatura.
La condicin de fallo o advertencia contina hasta que la temperatura medida
desciende por debajo del 95% del umbral de advertencia o fallo.
El tiempo de deteccin para el fallo o advertencia del sensor de temperatura del
motor es fijo, entre 0,5 s y 0,6 s.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin est disponible para todos los estados de funcionamiento.
NOTA:
La temperatura se obtiene de la siguiente ecuacin: T = 2,6042 * R - 260,42,
en la que R = resistencia ().
NOTA: Para conectar un sensor de 3 hilos PT100 a un controlador LTM R,
simplemente no cablee el pin de compensacin del sensor de 3 hilos PT100.
Funciones de proteccin del motor
134 1639505 06/2009
Caractersticas funcionales
La funcin de sensor de temperatura del motor PT100 presenta las siguientes
caractersticas:
2 umbrales configurables:
Sensor de temperatura del motor - umbral de advertencia en grados
Sensor de temperatura del motor - umbral de fallo en grados
2 salidas de funcin:
Motor-advertencia de sensor de temperatura
Motor-fallo de sensor de temperatura
1 contador:
Motor-nmero de fallos de sensor de temperatura
1 configuracin de visualizacin:
Motor-visualizacin grados CF de sensor de temperatura
Diagrama de bloques
Temperatura medida por el sensor PT100
s1 Motor-umbral de advertencia de sensor de temperatura
s2 Motor-umbral de fallo de sensor de temperatura
Configuracin de parmetros
La funcin de sensor de temperatura del motor PT100 presenta los siguientes
parmetros configurables:
Parmetros Intervalo de ajuste Ajuste de fbrica
Umbral de fallo en grados 0...200 C en incrementos de 1 C 0 C
Umbral de advertencia en grados 0...200 C en incrementos de 1 C 0 C
Motor-visualizacin grados CF de
sensor de temperatura
C (0)
F (1)
C
Funciones de proteccin del motor
1639505 06/2009 135
Caractersticas tcnicas
La funcin de sensor de temperatura del motor PT100 presenta las siguientes
caractersticas:
Ejemplo
En el siguiente diagrama se describe un fallo del sensor de temperatura del motor
PT100 con rearme automtico y comando de marcha activo:
s2 Umbral de fallo
s3 Umbral de reconexin de fallo (95% de umbral de fallo)
Caracterstica Valor
Histresis 5% de los umbrales de advertencia y fallo
Tiempo de deteccin 0,5...0,6 s
Precisin del tiempo de
disparo
+/0,1 s
Funciones de proteccin del motor
136 1639505 06/2009
Sensor de temperatura del motor - PTC analgico
Descripcin
La funcin de sensor de temperatura del motor PTC analgico se activa cuando el
parmetro Motor-tipo de sensor de temperatura est establecido en PTC analgico
y el controlador LTM R est conectado a un termistor PTC analgico integrado en
el motor.
El controlador LTM R supervisa el estado del elemento sensor de temperatura del
motor e indica:
Una advertencia cuando la resistencia medida supera un umbral de advertencia
configurable.
Un fallo cuando la resistencia medida supera un umbral de fallo definido de forma
independiente.
La condicin de fallo o advertencia contina hasta que la resistencia medida
desciende por debajo del 95% del umbral de advertencia o fallo.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin esta disponible para todos los estados de funcionamiento.
Caractersticas funcionales
La funcin de sensor de temperatura del motor PTC analgico presenta las
siguientes caractersticas:
2 umbrales configurables:
Motor-umbral de advertencia de sensor de temperatura
Motor-umbral de fallo de sensor de temperatura
2 salidas de funcin:
Motor-advertencia de sensor de temperatura
Motor-fallo de sensor de temperatura
1 contador:
Motor-nmero de fallos de sensor de temperatura
Funciones de proteccin del motor
1639505 06/2009 137
Diagrama de bloques
Resistencia del elemento sensor de temperatura
s1 Motor-umbral de advertencia de sensor de temperatura
s2 Motor-umbral de fallo de sensor de temperatura
Configuracin de parmetros
La funcin de sensor de temperatura del motor PTC analgico presenta los
siguientes parmetros configurables:
Caractersticas tcnicas
La funcin de sensor de temperatura del motor PTC analgico presenta las
siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Umbral de fallo 20...6500 en incrementos de 0,1 20
Umbral de advertencia 20...6500 en incrementos de 0,1 20
Caracterstica Valor
Histresis 5% de los umbrales de advertencia y fallo
Tiempo de deteccin 0,5...0,6 s
Precisin del tiempo de
deteccin
+/0,1 s
Funciones de proteccin del motor
138 1639505 06/2009
Ejemplo
En el siguiente diagrama se describe un fallo del PTC analgico del sensor de
temperatura del motor con rearme automtico y comando de marcha activo:
s2 Umbral de fallo
s3 Umbral de reconexin de fallo (95% de umbral de fallo)
Funciones de proteccin del motor
1639505 06/2009 139
Sensor de temperatura del motor - NTC analgico
Descripcin
La funcin de sensor de temperatura del motor NTC analgico se activa cuando el
parmetro Motor-tipo de sensor de temperatura est establecido en NTC analgico
y el controlador LTM R est conectado a un termistor NTC analgico integrado en
el motor.
El controlador LTM R supervisa el estado del elemento sensor de temperatura del
motor e indica:
Una advertencia cuando la resistencia medida desciende por debajo de un
umbral de advertencia configurable.
Un fallo cuando la resistencia medida desciende por debajo de un umbral de fallo
definido de forma independiente.
La condicin de fallo o advertencia contina hasta que la resistencia medida supera
el 105% del umbral de advertencia o fallo.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin esta disponible para todos los estados de funcionamiento.
Caractersticas funcionales
La funcin de sensor de temperatura del motor NTC analgico presenta las
siguientes caractersticas:
2 umbrales configurables:
Umbral de advertencia
Umbral de fallo
2 salidas de funcin:
Motor-advertencia de sensor de temperatura
Motor-fallo de sensor de temperatura
1 contador:
Motor-nmero de fallos de sensor de temperatura
Funciones de proteccin del motor
140 1639505 06/2009
Diagrama de bloques
Resistencia del elemento sensor de temperatura
s1 Motor-umbral de advertencia de sensor de temperatura
s2 Motor-umbral de fallo de sensor de temperatura
Configuracin de parmetros
La funcin de sensor de temperatura del motor NTC analgico presenta los
siguientes parmetros configurables:
Caractersticas tcnicas
La funcin de sensor de temperatura del motor NTC analgico presenta las
siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Umbral de fallo 20...6500 en incrementos de 0,1 20
Umbral de advertencia 20...6500 en incrementos de 0,1 20
Caractersticas Valor
Histresis +5% de los umbrales de advertencia y fallo
Tiempo de deteccin 0,5...0,6 s
Precisin del tiempo de
deteccin
+/0,1 s
Funciones de proteccin del motor
1639505 06/2009 141
Ejemplo
El siguiente diagrama describe un fallo del NTC analgico del sensor de
temperatura del motor con rearme automtico:
r2 Umbral de fallo
r3 Umbral de reconexin de fallo (105% de umbral de fallo)
Funciones de proteccin del motor
142 1639505 06/2009
Ciclo rpido-bloqueo
Descripcin
La funcin Ciclo rpido-bloqueo impide daos potenciales en el motor como
consecuencia de corrientes de entrada sucesivas y repetitivas debidas a espacios
de tiempo demasiado cortos entre arranques.
La funcin Ciclo rpido-bloqueo proporciona un temporizador configurable, que
comienza a contar cuando el controlador LTM R detecta corriente en nivel, definida
como un 10% de FLC. Al mismo tiempo, se activa el bit de Ciclo rpido-bloqueo.
Si el controlador LTM R detecta un comando de marcha antes de que haya
transcurrido el bloqueo de ciclo rpido:
El bit de Ciclo rpido-bloqueo permanece activado.
El controlador LTM R omite el comando de marcha. Evita que el motor
rearranque.
El dispositivo HMI (si est conectado) muestra un mensaje de espera ("WAIT").
El LED de alarma del controlador LTM R parpadea en rojo 5 veces por segundo,
lo que indica que el controlador LTM R ha desactivado las salidas del motor e
impide, por lo tanto, una condicin no deseada derivada del arranque del motor.
El controlador LTM R supervisa el tiempo de espera y, si hay ms de 1
temporizador activo, el LTM R informa del tiempo mnimo de espera antes de
que transcurra el temporizador ms largo.
Cuando se produce una prdida de alimentacin, el controlador LTM R guarda el
estado del temporizador de bloqueo en la memoria no voltil. Cuando el controlador
LTM R recupera de nuevo la alimentacin, el temporizador reinicia su recuento y
omite de nuevo los comandos de marcha hasta que finaliza el tiempo sobrepasado.
Si el parmetro Ciclo rpido-tiempo sobrepasado de bloqueo se ajusta en 0, esta
funcin se desactiva.
El parmetro Ciclo rpido-tiempo sobrepasado de bloqueo se puede editar cuando
el controlador LTM R se encuentra en su estado de funcionamiento normal. Si se
realiza una modificacin mientras el temporizador est contando, se hace efectiva
cuando finaliza el recuento.
Esta funcin no tiene advertencias ni fallos.
NOTA: La funcin Ciclo rpido-bloqueo no est activa cuando se selecciona el
modo de funcionamiento de sobrecarga.
Funciones de proteccin del motor
1639505 06/2009 143
Caractersticas funcionales
La funcin Ciclo rpido-bloqueo incluye los siguientes parmetros:
1 temporizador:
Ciclo rpido-tiempo sobrepasado de bloqueo
1 bit de estado:
Ciclo rpido-bloqueo
Adems, la funcin Ciclo rpido-bloqueo:
Desactiva las salidas del motor.
Hace que el LED de alarma del controlador LTM R parpadee 5 veces por
segundo.
Configuracin de parmetros
La funcin Ciclo rpido-bloqueo presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin Ciclo rpido-bloqueo presenta las siguientes caractersticas:
Ejemplo
Parmetros Intervalo de ajuste Ajuste de fbrica
Ciclo rpido-tiempo sobrepasado
de bloqueo
0...999,9 s en incrementos de 0,1 s 0 s
Caractersticas Valor
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
144 1639505 06/2009
3.3 Funciones de proteccin de la tensin del motor
Descripcin general
En esta seccin se describen las funciones de proteccin de la tensin del motor
que proporciona el controlador LTM R.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Desequilibrio de tensiones de fase 145
Prdida de tensin de fase 149
Inversin de tensin de fase 152
Infratensin 153
Sobretensin 156
Gestin de cadas de tensin 159
Descarga 160
Rearranque automtico 163
Funciones de proteccin del motor
1639505 06/2009 145
Desequilibrio de tensiones de fase
Descripcin
La funcin Tensin-desequilibrio de fases indica:
Una advertencia cuando la tensin de una fase compuesta difiere de la tensin
media en ms de un porcentaje definido en las 3 fases.
Un fallo cuando la tensin de una fase compuesta difiere de la tensin media en
ms de un porcentaje establecido de forma independiente durante un perodo de
tiempo definido en las 3 fases.
NOTA: Una fase compuesta es la medida combinada de 2 fases: L1 + L2, L2 + L3
o L3 + L1.
Esta funcin presenta 2 temporizadores de fallo ajustables:
uno se aplica a los desequilibrios de tensin que tienen lugar mientras el motor
se encuentra en estado de arranque, y
el otro se aplica a los desequilibrios de tensin que se producen mientras el
motor est en estado de marcha, o cuando vence la duracin del tiempo de
arranque prolongado
Ambos temporizadores se inician si el desequilibrio se detecta en estado de
arranque.
NOTA: Utilice esta funcin para detectar y protegerse contra los desequilibrios de
tensiones de fase ms pequeos. En el caso de desequilibrios grandes, ms del
40% de la tensin media en las 3 fases, utilice la funcin de proteccin del motor de
prdida de tensin de fase.
Esta funcin slo se encuentra disponible en los estados de arranque y marcha,
cuando el controlador LTM R est conectado a un mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin slo se aplica a los motores trifsicos.
Funciones de proteccin del motor
146 1639505 06/2009
Caractersticas funcionales
La funcin de desequilibrio de tensiones de fase incluye las siguientes
caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
2 temporizadores de fallo:
Tiempo sobrepasado de fallo en el arranque
Tiempo sobrepasado de fallos en marcha
2 salidas de funcin:
Tensin-advertencia de desequilibrio de fases
Tensin-fallo de desequilibrio de fases
1 contador:
Tensin-nmero de fallos de desequilibrio de fases
3 indicadores que identifican la fase con el desequilibrio de tensin mayor:
L1-L2 Desequilibrio mayor
L2-L3 Desequilibrio mayor
L3-L1 Desequilibrio mayor
Funciones de proteccin del motor
1639505 06/2009 147
Diagrama de bloques
V1 Tensin L1-L2
V2 Tensin L2-L3
V3 Tensin L3-L1
Ln Nmero o nmeros de lnea con la desviacin ms grande con respecto a Vmed
Vs1 Umbral de advertencia
Vs2 Umbral de fallo
Vmed Tensin media en 3 fases
T1 Tiempo sobrepasado de fallo en el arranque
T2 Tiempo sobrepasado de fallos en marcha
Funciones de proteccin del motor
148 1639505 06/2009
Configuracin de parmetros
La funcin de desequilibrio de tensiones de fase incluye los siguientes parmetros:
Caractersticas tcnicas
La funcin de desequilibrio de tensiones de fase incluye los siguientes parmetros:
Ejemplo
El siguiente diagrama muestra un desequilibrio de tensiones de fase:
V% Diferencia de porcentaje entre la tensin en cualquier fase y la tensin media en las 3
fases
Vs2 Umbral de fallo
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo en
arranque
0,2...20 s en incrementos de 0,1 s 0,7 s
Tiempo sobrepasado de fallo en
marcha
0,2...20 s en incrementos de 0,1 s 2 s
Umbral de fallo 3...15% del desequilibrio calculado en
incrementos del 1%
10%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 3...15% del desequilibrio calculado en
incrementos del 1%
10%
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 149
Prdida de tensin de fase
Descripcin
La funcin de prdida de tensin de fase se basa en la funcin de desequilibrio de
tensiones de fase e indica:
Una advertencia cuando la tensin de una fase difiere de la tensin media en
ms de un 38% en las 3 fases.
Un fallo cuando la tensin de una fase difiere de la tensin media en ms del 38%
en las 3 fases durante un perodo de tiempo definido.
Esta funcin presenta un solo temporizador de fallo ajustable.
NOTA: Utilice esta funcin para detectar y protegerse contra los desequilibrios de
tensiones de fase grandes (ms del 40% de la tensin media en las 3 fases). En el
caso de desequilibrios de tensin ms pequeos, utilice la funcin de proteccin del
motor contra desequilibrio de tensiones de fase.
Esta funcin se encuentra disponible en el estado de arranque, cuando el
controlador LTM R est conectado a un mdulo de expansin. La funcin de
prdida de tensin de fase est disponible durante el estado de arranque y de
marcha.
La funcin identifica la fase que experimenta una prdida de tensin. Si la
desviacin mxima de la tensin media en las 3 fases es la misma en 2 fases, la
funcin identifica ambas fases.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
La funcin slo se aplica a los motores trifsicos.
Caractersticas funcionales
La funcin de prdida de tensin de fase incluye las siguientes caractersticas:
Un umbral de advertencia y fallo fijo igual al 38% de la tensin media en las 3
fases
Un nico temporizador de fallo ajustable:
Tiempo sobrepasado de fallo de prdida de tensin de fase
2 salidas de funcin:
Tensin-advertencia de prdida de fase
Tensin-fallo de prdida de fase
1 contador:
Tensin-nmero de fallos de prdida de fase
3 indicadores que identifican la fase que experimenta la prdida de tensin:
Prdida de tensin L1-L2
Prdida de tensin L2-L3
Prdida de tensin L3-L1
Funciones de proteccin del motor
150 1639505 06/2009
Diagrama de bloques
V1 Tensin L1-L2
V2 Tensin L2-L3
V3 Tensin L3-L1
Ln Nmero o nmeros de lnea tensin de red con la desviacin ms grande con respecto a
Vmed
Vmed Tensin media en 3 fases
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de prdida de tensin de fase presenta los siguientes parmetros
configurables:
Caractersticas tcnicas
La funcin de prdida de tensin de fase presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Activado
Tiempo sobrepasado de fallo 0,1...30 s en incrementos de 0,1 s 3 s
Activacin de advertencia Activado/Desactivado Activado
Caractersticas Valor
Histresis 45% de la tensin media en las 3 fases
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 151
Ejemplo
El siguiente diagrama muestra un fallo de prdida de tensin de fase de un motor
en estado de marcha:
V% Diferencia de porcentaje entre la tensin en cualquier fase y la tensin media en las 3
fases
Funciones de proteccin del motor
152 1639505 06/2009
Inversin de tensin de fase
Descripcin
La funcin de inversin de tensin de fase indica un fallo cuando detecta que las
tensiones de fase de un motor trifsico no estn en secuencia, lo que suele ser
indicio de un error de cableado. Utilice el parmetro Motor-secuencia de fases para
configurar la direccin, ABC o ACB, de giro del motor.
Esta funcin:
Se activa cuando el controlador LTM R est conectado a un mdulo de
expansin.
Est disponible cuando el motor est en los estados listo, arranque o marcha.
Slo se aplica a los motores trifsicos.
No tiene advertencias ni temporizadores.
Esta funcin se puede activar o desactivar.
Caractersticas funcionales
La funcin de inversin de tensin de fase aade un contador, Cableado-nmero
de fallos.
Configuracin de parmetros
La funcin de inversin de tensin de fase presenta los siguientes parmetros
configurables:
Caractersticas tcnicas
La funcin de inversin de tensin de fase presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Motor-secuencia de fases A-B-C
A-C-B
A-B-C
Caractersticas Valor
Tiempo de disparo En 0,2 s
Precisin del tiempo de disparo +/0,1 s
Funciones de proteccin del motor
1639505 06/2009 153
Infratensin
Descripcin
La funcin de infratensin indica:
Una advertencia cuando la tensin en una fase desciende por debajo de un
umbral definido.
Un fallo cuando la tensin en una fase desciende por debajo de un umbral
definido de forma independiente y permanece as durante un perodo de tiempo
establecido.
Esta funcin presenta un solo temporizador de fallo. Los umbrales de fallo y
advertencia se definen como un porcentaje del parmetro Motor-tensin nominal
(Vnom).
La funcin de infratensin slo se encuentra disponible en los estados de arranque
y marcha, cuando el controlador LTM R est conectado a un mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de infratensin incluye las siguientes caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Infratensin-advertencia
Infratensin-fallo
1 contador:
Infratensin-nmero de fallos
Funciones de proteccin del motor
154 1639505 06/2009
Diagrama de bloques
V1 Tensin L1-L2
V2 Tensin L2-L3
V3 Tensin L3-L1
Vs1 Umbral de advertencia
Vs2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de infratensin presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de infratensin presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 0,2...25 s en incrementos de 0,1 s 3 s
Umbral de fallo 70...99% de Motor-tensin nominal en incrementos del 1% 85%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 70...99% de Motor-tensin nominal en incrementos del 1% 85%
Caractersticas Valor
Histresis -5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 155
Ejemplo
El siguiente diagrama muestra un fallo de infratensin.
Vs2 Infratensin-umbral de fallo
Funciones de proteccin del motor
156 1639505 06/2009
Sobretensin
Descripcin
La funcin de sobretensin indica:
Una advertencia cuando la tensin en una fase supera un umbral definido.
Un fallo, cuando la tensin en una fase supera continuamente un umbral
establecido de forma independiente durante un perodo de tiempo definido.
Esta funcin presenta un solo temporizador de fallo. Los umbrales de fallo y
advertencia se definen como un porcentaje del parmetro Motor-tensin nominal
(Vnom).
La funcin de sobretensin se encuentra disponible en los estados de arranque y
marcha, cuando el controlador LTM R est conectado a un mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de sobretensin incluye las siguientes caractersticas:
2 umbrales:
Umbral de advertencia
Umbral de fallo
1 temporizador de fallo:
Tiempo sobrepasado de fallo
2 salidas de funcin:
Sobretensin-advertencia
Sobretensin-fallo
1 contador:
Sobretensin-nmero de fallos
Funciones de proteccin del motor
1639505 06/2009 157
Diagrama de bloques
V1 Tensin L1-L2
V2 Tensin L2-L3
V3 Tensin L3-L1
Vs1 Umbral de advertencia
Vs2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de sobretensin presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de sobretensin presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 0,2...25 s en incrementos de 0,1 s 3 s
Umbral de fallo 101...115% de Motor-tensin nominal en incrementos del 1% 110%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 101...115% de Motor-tensin nominal en incrementos del 1% 110%
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
158 1639505 06/2009
Ejemplo
El siguiente diagrama muestra un fallo de sobretensin.
Vs2 Sobretensin-umbral de fallo
Funciones de proteccin del motor
1639505 06/2009 159
Gestin de cadas de tensin
Descripcin general
Cuando se detecta una cada de tensin, el controlador LTM R puede utilizar dos
funciones diferentes para descargar y reconectar la carga de forma automtica:
Descarga (vase pgina 160)
Rearranque automtico (vase pgina 163)
La seleccin se realiza a travs del parmetro Modo cada de tensin:
Las funciones de descarga y rearranque automtico son excluyentes entre s.
Si Modo cada de tensin es Entonces...
0 No ocurre nada
1 Se activa la funcin de descarga
2 Se activa la funcin de rearranque automtico
Funciones de proteccin del motor
160 1639505 06/2009
Descarga
Descripcin
El controlador LTM R proporciona la funcin de descarga, que puede utilizarse para
desactivar las cargas no crticas en caso de que el nivel de tensin se reduzca de
manera considerable. Por ejemplo, utilice la descarga cuando la alimentacin se
transfiera desde una fuente de alimentacin principal a un sistema generador de
reserva, donde el sistema generador de reserva slo puede suministrar
alimentacin a un nmero limitado de cargas crticas.
El controlador LTM R solo supervisa la descarga cuando se selecciona Descarga.
Cuando la funcin de descarga est activada, el controlador LTM R supervisa la
tensin de fase media y lleva a cabo las siguientes acciones:
Informa de una condicin de descarga y para el motor cuando la tensin
desciende por debajo de un umbral de cada de tensin configurable y
permanece as lo que dura un temporizador de descarga.
Elimina la condicin de descarga cuando la tensin se eleva por encima de un
umbral de rearranque por cada de tensin configurable y permanece as lo que
dura un temporizador de rearme de descarga configurable.
Cuando el controlador LTM R elimina la condicin de descarga:
En configuraciones de 2 hilos (mantenido), emite un comando de marcha para
rearrancar el motor.
En configuraciones de 3 hilos (impulso), no rearranca automticamente el motor.
En el modo de funcionamiento de sobrecarga, las condiciones de descarga no
afectan a los estados de funcionamiento O.1 y O.2.
En el modo de funcionamiento independiente, las condiciones de descarga no
afectan al estado O.2.
Si su aplicacin incluye otro dispositivo que proporciona descarga externa, la
funcin de descarga del controlador LTM R no se debe activar.
Todos los temporizadores y umbrales de cada de tensin se pueden ajustar
cuando el controlador LTM R se encuentra en su estado de funcionamiento normal.
Si un temporizador de descarga est contando en el momento de su ajuste, la
nueva duracin no se har efectiva hasta que finalice el temporizador.
Esta funcin slo est disponible cuando la aplicacin incluye un mdulo de
expansin LTM E.
Funciones de proteccin del motor
1639505 06/2009 161
Caractersticas funcionales
La funcin de descarga incluye las siguientes caractersticas:
2 umbrales:
Umbral de cada de tensin
Umbral de rearranque por cada de tensin
2 retardos:
Descarga-tiempo sobrepasado
Tiempo sobrepasado de rearranque por cada de tensin
1 indicador de estado
Descarga
1 contador:
Descarga-nmero
Adems, la funcin de descarga:
Desactiva las salidas lgicas O.1 y O.2.
Hace que el LED de alarma parpadee 5 veces por segundo.
Configuracin de parmetros
La funcin de descarga presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de descarga presenta las caractersticas siguientes:
Parmetros Intervalo de ajuste Ajuste de fbrica
Modo cada de tensin 0 = Ninguno
1 = Descarga
2 = Rearranque automtico
0 = Ninguno
Descarga-tiempo sobrepasado 1...9999 s en incrementos de 1 s 10 s
Umbral de cada de tensin 50...115% de Motor-tensin nominal 70%
Tiempo sobrepasado de rearranque por cada
de tensin
1...9999 s en incrementos de 1 s 2 s
Umbral de rearranque por cada de tensin 65...115% de Motor-tensin nominal 90%
Caractersticas Valor
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
162 1639505 06/2009
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo de la funcin de
descarga para una configuracin de 2 hilos con rearme automtico:
1 Motor en marcha
2 Descarga; motor parado
3 Descarga eliminada; rearranque automtico del motor (funcionamiento de 2 hilos)
Funciones de proteccin del motor
1639505 06/2009 163
Rearranque automtico
Descripcin
El controlador LTM R ofrece la opcin de rearranque automtico.
Si se encuentra activada la funcin de rearranque automtico, el controlador LTM R
supervisa la tensin de fase instantnea y detecta la aparicin de cadas de tensin.
Esta funcin de deteccin de cada de tensin comparte algunos parmetros con la
funcin de descarga.
La funcin gestiona 3 secuencias de rearranque distintas de acuerdo con la
duracin de la cada de tensin:
Rearranque inmediato: el motor rearranca de forma automtica.
Rearranque con retardo: el motor rearranca de forma automtica una vez
sobrepasado un tiempo determinado.
Rearranque manual: el motor rearranca de forma manual. Para ello es necesario
ejecutar un comando de marcha.
Todos los temporizadores de rearranque automtico se pueden ajustar cuando el
controlador LTM R se encuentra en su estado de funcionamiento normal. Si en el
momento del ajuste de un temporizador de rearranque automtico ste se
encuentra contando, la nueva duracin no se har efectiva hasta que finalice el
temporizador.
Esta funcin slo est disponible cuando la aplicacin incluye un mdulo de
expansin LTM E.
Caractersticas funcionales
La funcin de rearranque automtico incluye las siguientes caractersticas:
3 retardos:
Tiempo sobrepasado de rearranque automtico inmediato
Tiempo sobrepasado de rearranque automtico con retardo
Tiempo sobrepasado de rearranque por cada de tensin
5 indicadores de estado:
Deteccin de cada de tensin: el LTM R est en estado de cada.
Cada de tensin producida: se ha detectado una cada en los ltimos 4,5
segundos.
Condicin de rearranque automtico inmediato
Condicin de rearranque automtico con retardo
Condicin de rearranque automtico manual
3 contadores:
Nmero de rearranques automticos inmediatos
Nmero de rearranques automticos con retardo
Nmero de rearranques automticos manuales
Funciones de proteccin del motor
164 1639505 06/2009
Configuracin de parmetros
La funcin de rearranque automtico presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de rearranque automtico presenta las siguientes caractersticas:
Comportamiento del rearranque automtico
El comportamiento del rearranque automtico depende de la duracin de la cada
de tensin, que es el tiempo transcurrido desde la prdida de tensin hasta su
restablecimiento.
Existen 2 ajustes posibles, que son los siguientes:
Tiempo sobrepasado de rearranque inmediato
Tiempo sobrepasado de rearranque con retardo (el retardo lo define el parmetro
Retardo para rearranque)
Parmetros Intervalo de ajuste Ajuste de fbrica
Modo cada de tensin 0 = Ninguno
1 = Descarga
2 = Rearranque automtico
0 = Ninguno
Umbral de cada de tensin 50...115% de Motor-tensin nominal 65%
Umbral de rearranque por cada de tensin 65...115% de Motor-tensin nominal 90%
Tiempo sobrepasado de rearranque automtico
inmediato
0...0,4 s en incrementos de 0,1 s 0,2 s
Tiempo sobrepasado de rearranque automtico
con retardo
0...300 s: ajuste de tiempo
sobrepasado en incrementos de 1 s
301 s: tiempo sobrepasado infinito
4 s
Tiempo sobrepasado de rearranque por cada
de tensin
0...9999 s en incrementos de 1 s 2 s
Caractersticas Valor
Precisin de la temporizacin +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 165
En el diagrama siguiente se muestran las fases del rearranque automtico:
Si la duracin de la cada de tensin es inferior al tiempo sobrepasado de
rearranque inmediato y si la cada de tensin es la segunda que ocurre en un lapso
de 1 segundo, ser necesario efectuar un rearranque con retardo del motor.
Si se encuentra activo un rearranque con retardo (se est contando el retardo):
El temporizador se detendr durante la cada de tensin cuando esta se
produzca.
Se cancelar el rearranque con retardo si se ejecuta un comando de arranque o
parada.
Funciones de proteccin del motor
166 1639505 06/2009
Secuencia de tiempo: rearranque inmediato
En el siguiente diagrama se ilustra un ejemplo de la secuencia de tiempo cuando se
produce un rearranque inmediato:
1 Motor en marcha
2 Deteccin de cada de tensin, parada del motor
3 Restablecimiento de la tensin, rearranque automtico del motor
Funciones de proteccin del motor
1639505 06/2009 167
Secuencia de tiempo: rearranque con retardo
En el siguiente diagrama se ilustra un ejemplo de la secuencia de tiempo cuando se
produce un rearranque con retardo:
1 Motor en marcha
2 Deteccin de cada de tensin, parada del motor
3 Restablecimiento de la tensin, rearranque automtico del motor
Funciones de proteccin del motor
168 1639505 06/2009
Secuencia de tiempo: rearranque manual
En el siguiente diagrama se ilustra un ejemplo de la secuencia de tiempo cuando se
produce un rearranque manual:
1 Motor en marcha
2 Deteccin de cada de tensin, parada del motor
3 Restablecimiento de la tensin, rearranque automtico del motor
Funciones de proteccin del motor
1639505 06/2009 169
3.4 Funciones de proteccin de alimentacin del
motor
Descripcin general
En esta seccin se describen las funciones de proteccin de alimentacin del motor
que proporciona el controlador LTM R.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Potencia insuficiente 170
Potencia excesiva 173
Factor de potencia insuficiente 176
Factor de potencia excesivo 179
Funciones de proteccin del motor
170 1639505 06/2009
Potencia insuficiente
Descripcin
La funcin de potencia insuficiente indica:
Una advertencia si el valor del factor de potencia activa desciende por debajo de
un umbral definido.
Un fallo cuando el valor de la potencia activa desciende por debajo de un umbral
definido de forma independiente y permanece as durante un perodo de tiempo
establecido.
Esta funcin presenta un solo temporizador de fallo. Los umbrales de fallo y
advertencia se definen como un porcentaje del parmetro Motor-potencia nominal
(Pnom).
La funcin de potencia insuficiente slo se encuentra disponible en estado de
marcha, cuando el controlador LTM R est conectado a un mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de potencia insuficiente incluye las siguientes caractersticas:
2 umbrales:
Potencia insuficiente-umbral de advertencia
Potencia insuficiente-umbral de fallo
1 temporizador de fallo:
Potencia insuficiente-tiempo sobrepasado de fallo
2 salidas de funcin:
Potencia insuficiente-advertencia
Potencia insuficiente-fallo
1 contador:
Potencia insuficiente-nmero de fallos
Funciones de proteccin del motor
1639505 06/2009 171
Diagrama de bloques
Vmed Valor eficaz promedio de tensin
Imed Valor eficaz promedio de corriente
P Potencia
Ps1 Umbral de advertencia
Ps2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de potencia insuficiente presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de potencia insuficiente presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...100 s en incrementos de 1 s 60 s
Umbral de fallo 20...800% de Motor-potencia nominal en incrementos del 1% 20%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 20...800% de Motor-potencia nominal en incrementos del 1% 30%
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin +/5%
Funciones de proteccin del motor
172 1639505 06/2009
Ejemplo
El siguiente diagrama muestra un fallo de potencia insuficiente.
Ps2 Potencia insuficiente-umbral de fallo
Funciones de proteccin del motor
1639505 06/2009 173
Potencia excesiva
Descripcin
La funcin de potencia excesiva indica:
Una advertencia si el valor de la potencia activa supera un umbral definido.
Un fallo cuando el valor de la potencia activa supera un umbral definido de forma
independiente y permanece as durante un perodo de tiempo establecido.
Esta funcin presenta un solo temporizador de fallo. Los umbrales de fallo y
advertencia se definen como un porcentaje del parmetro Motor-potencia nominal
(Pnom).
La funcin de potencia excesiva slo se encuentra disponible en estado de marcha,
cuando el controlador LTM R est conectado a un mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de potencia excesiva incluye las siguientes caractersticas:
2 umbrales:
Potencia excesiva-umbral de advertencia
Potencia excesiva-umbral de fallo
1 temporizador de fallo:
Potencia excesiva-tiempo sobrepasado de fallo
2 salidas de funcin:
Potencia excesiva-advertencia
Potencia excesiva-fallo
1 contador:
Potencia excesiva-nmero de fallos
Funciones de proteccin del motor
174 1639505 06/2009
Diagrama de bloques
Vmed Valor eficaz promedio de tensin
Imed Valor eficaz promedio de corriente
P Potencia
Ps1 Umbral de advertencia
Ps2 Umbral de fallo
T Tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de potencia excesiva presenta los siguientes parmetros:
Caractersticas tcnicas
La funcin de potencia excesiva presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...100 s en incrementos de 1 s 60 s
Umbral de fallo 20...800% de Motor-potencia nominal en incrementos del 1% 150%
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 20...800% de Motor-potencia nominal en incrementos del 1% 150%
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin +/5%
Funciones de proteccin del motor
1639505 06/2009 175
Ejemplo
El siguiente diagrama muestra un fallo de potencia excesiva.
Ps2 Potencia excesiva-umbral de fallo
Funciones de proteccin del motor
176 1639505 06/2009
Factor de potencia insuficiente
Descripcin
La funcin de proteccin de factor de potencia insuficiente supervisa el valor del
factor de potencia e indica:
Una advertencia si el valor del factor de potencia desciende por debajo de un
umbral definido.
Un fallo cuando el valor del factor de potencia desciende por debajo de un umbral
definido de forma independiente y permanece as durante un perodo de tiempo
establecido.
Esta funcin presenta un solo temporizador de fallo.
La funcin de proteccin de factor de potencia insuficiente slo se encuentra
disponible en estado de marcha, cuando el controlador LTM R est conectado a un
mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de factor de potencia insuficiente incluye las siguientes caractersticas:
2 umbrales:
Factor de potencia insuficiente-umbral de advertencia
Factor de potencia insuficiente-umbral de fallo
1 temporizador de fallo:
Factor de potencia insuficiente-tiempo sobrepasado de fallo
2 salidas de funcin:
Factor de potencia insuficiente-advertencia
Factor de potencia insuficiente-fallo
1 contador:
Factor de potencia insuficiente-nmero de fallos
Funciones de proteccin del motor
1639505 06/2009 177
Diagrama de bloques
coss1 Factor de potencia insuficiente-umbral de advertencia
coss2 Factor de potencia insuficiente-umbral de fallo
T Factor de potencia insuficiente-tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de factor de potencia insuficiente incluye los siguientes parmetros:
Caractersticas tcnicas
La funcin de factor de potencia insuficiente presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...25 s en incrementos de 0,1 s 10 s
Umbral de fallo 0...1 x factor de potencia en incrementos de 0,01 0,60
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 0...1 x factor de potencia en incrementos de 0,01 0,60
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin +/2 o +/3% (para factores de potencia > 0,6)
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
178 1639505 06/2009
Ejemplo
El siguiente diagrama muestra un fallo de factor de potencia insuficiente.
coss2 Factor de potencia insuficiente-umbral de fallo
Funciones de proteccin del motor
1639505 06/2009 179
Factor de potencia excesivo
Descripcin
La funcin de proteccin de factor de potencia excesivo supervisa el valor del factor
de potencia e indica:
Una advertencia si el valor del factor de potencia supera un umbral definido.
Un fallo cuando el valor del factor de potencia supera un umbral definido de
forma independiente y permanece as durante un perodo de tiempo establecido.
Esta funcin presenta un solo temporizador de fallo.
La funcin de proteccin de factor de potencia excesivo slo se encuentra
disponible en estado de marcha, cuando el controlador LTM R est conectado a un
mdulo de expansin.
La supervisin de fallos y advertencias se puede activar o desactivar de forma
independiente.
Caractersticas funcionales
La funcin de factor de potencia excesivo incluye las siguientes caractersticas:
2 umbrales:
Factor de potencia excesivo-umbral de advertencia
Factor de potencia excesivo-umbral de fallo
1 temporizador de fallo:
Factor de potencia excesivo-tiempo sobrepasado de fallo
2 salidas de funcin:
Factor de potencia excesivo-advertencia
Factor de potencia excesivo-fallo
1 contador:
Factor de potencia excesivo-nmero de fallos
Funciones de proteccin del motor
180 1639505 06/2009
Diagrama de bloques
coss1 Factor de potencia excesivo-umbral de advertencia
coss2 Factor de potencia excesivo-umbral de fallo
T Factor de potencia excesivo-tiempo sobrepasado de fallo
Configuracin de parmetros
La funcin de factor de potencia excesivo incluye los siguientes parmetros:
Caractersticas tcnicas
La funcin de factor de potencia excesivo presenta las siguientes caractersticas:
Parmetros Intervalo de ajuste Ajuste de fbrica
Activacin de fallo Activado/Desactivado Desactivado
Tiempo sobrepasado de fallo 1...25 s en incrementos de 0,1 s 10 s
Umbral de fallo 0...1 x factor de potencia en incrementos de 0,01 0,90
Activacin de advertencia Activado/Desactivado Desactivado
Umbral de advertencia 0...1 x factor de potencia en incrementos de 0,01 0,90
Caractersticas Valor
Histresis 5% del umbral de fallo o umbral de advertencia
Precisin +/2 o +/3% (para factores de potencia > 0,6)
Precisin del tiempo de disparo +/0,1 s o +/5%
Funciones de proteccin del motor
1639505 06/2009 181
Ejemplo
El siguiente diagrama muestra un fallo de factor de potencia excesivo.
coss2 Factor de potencia excesivo-umbral de fallo
Funciones de proteccin del motor
182 1639505 06/2009
1639505 06/2009 183
4
Funciones de control del motor
1639505 06/2009
Funciones de control del motor
Descripcin general
En los temas de este captulo se describen los estados de funcionamiento del
controlador LTM R que determinan los modos de funcionamiento y el modo de
rearme tras fallo (manual, a distancia, automtico).
En este captulo se presenta tambin el modo de funcionamiento personalizado,
que se puede emplear para adaptar un programa de control predefinido o crear un
nuevo programa que satisfaga las necesidades de una aplicacin especfica.
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
4.1 Canales de control y estados de funcionamiento 184
4.2 Modos de funcionamiento 198
4.3 Gestin de fallos y comandos Borrar 230
Funciones de control del motor
184 1639505 06/2009
4.1 Canales de control y estados de funcionamiento
Descripcin general
En esta seccin se describe:
cmo configurar el control de las salidas del controlador LTM R, y
los estados de funcionamiento del controlador LTM R, como por ejemplo:
cmo pasa el controlador LTM R entre los estados de funcionamiento durante
el arranque, y
las funciones de proteccin del motor que ofrece el controlador LTM R en
cada estado de funcionamiento
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
La aplicacin de este producto requiere experiencia en el diseo y la
programacin de sistemas de control. Slo las personas que tengan experiencia
estn autorizadas a programar, instalar, modificar y aplicar este producto. Siga
todos los cdigos y normativas de seguridad locales y nacionales.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Canales de control 185
Estados de funcionamiento 190
Ciclo de arranque 194
Funciones de control del motor
1639505 06/2009 185
Canales de control
Descripcin general
El LTM R se puede configurar para 1 de 3 canales de control:
Bornero de conexin: dispositivos de entrada conectados a las conexiones de
entrada de la cara frontal del controlador LTM R.
HMI: un dispositivo HMI conectado al puerto HMI del controlador LTM R.
Red: una red PLC conectada al puerto de red del controlador.
Seleccin del canal de control
Puede escoger de entre 2 canales de control, asignando un canal como origen de
control local y el segundo canal como origen de control a distancia.
Las asignaciones de canales posibles son:
En control local, la seleccin del canal de control (Bornero de conexin o HMI) se
determina configurando el control de ajuste de canal local en el registro de
configuracin de control.
En el control a distancia, la seleccin del canal de control es siempre Red, excepto
si hay un LTM CU presente. En este caso, la seleccin del canal de control se
determina configurando el ajuste del canal de control a distancia en el registro de
configuracin de control.
Canal de control Local A distancia
Bornero de conexin
(predeterminado)
S Slo con un LTM CU presente
HMI S Slo con un LTM CU presente
Red No S
Funciones de control del motor
186 1639505 06/2009
Si hay un LTM CU presente, la entrada lgica I.6 y el botn a distancia/local del
LTM CU se utilizan conjuntamente para seleccionar entre el origen de control a
distancia y local:
NOTA:
El canal de control de red siempre se considera como un control de 2 hilos,
independientemente del modo de funcionamiento seleccionado.
En modo de 3 hilos, los comandos de parada se pueden desactivar utilizando los
bits 11-12 del registro 683.
En modo de 2 hilos, los comandos de parada proporcionados por el canal no
controlador se debern ignorar siempre.
Los comandos de marcha de un canal que no sea el canal de control
seleccionado se debern ignorar.
Si se desea un modo de funcionamiento predefinido, slo se puede activar un
origen de control para dirigir las salidas. Puede utilizar el editor de lgica
personalizada para aadir uno o varios orgenes de control adicionales.
Bornero de conexin
En control de bornero de conexin, el controlador LTM R transmite comandos a sus
salidas en funcin del estado de sus entradas. Este es el ajuste de canal de control
predeterminado cuando la entrada lgica I.6 est inactiva.
Las siguientes condiciones se aplican al canal de control de bornero de conexin:
Cualquier entrada de terminal asignada a los comandos de arranque y parada
controla las salidas de acuerdo con el modo de funcionamiento del motor.
Los comandos de arranque de red y HMI se ignoran.
Al utilizar la LTM CU, el parmetro Detencin de la desactivacin del bornero de
conexin se establece en el registro de ajuste de control.
HMI
En control HMI, el controlador LTM R transmite comandos a sus salidas como
respuesta a los comandos de arranque y parada recibidos de un dispositivo HMI
conectado al puerto HMI.
Las siguientes condiciones se aplican al canal de control HMI:
Cualquier comando de arranque o parada de HMI controla las salidas de acuerdo
con el modo de funcionamiento del motor.
Los comandos de arranque de red y de bornero de conexin se ignoran.
Al utilizar la LTM CU, el parmetro Detencin de la desactivacin de HMI se
establece en el registro de ajuste de control.
Entrada lgica I.6 Estado a distancia/local del LTM CU Origen de control activo
Inactivo - Local
Activo Local Local
A distancia (o no presente) A distancia
Funciones de control del motor
1639505 06/2009 187
Red
En control de red, un PLC a distancia enva comandos al controlador LTM R a
travs del puerto de comunicacin de red.
Las siguientes condiciones se aplican al canal de control de red:
Cualquier comando de arranque o parada de red controla las salidas de acuerdo
con el modo de funcionamiento del motor.
La unidad HMI puede leer (pero no escribir) los parmetros del controlador
LTM R.
Modo de transferencia de control
Seleccione el parmetro Modo de transferencia de control para activar la
transferencia sin sacudidas al cambiar el canal de control; desactvelo para permitir
transferencias con sacudidas. El ajuste de configuracin de este parmetro
determina el comportamiento de las salidas lgicas O.1 y O.2, de la manera
siguiente:
Al arrancar el motor en modo de control a distancia con el PLC, el controlador
LTM R cambia al modo de control local (I.6=1 a I.6=0) y el estado del motor cambia
en funcin del modo de transferencia de control, de la siguiente manera:
Configuracin del modo de
transferencia de control
Comportamiento del controlador LTM R cuando cambia el canal de control
Con sacudidas Las salidas lgicas O.1 y O.2 se abren (si estn cerradas) o permanecen abiertas
(si ya estn abiertas) hasta que se produce la siguiente seal vlida. El motor se
para.
Nota: En el modo de funcionamiento predefinido de sobrecarga, el usuario define
las salidas lgicas O.1 y O.2 y, por lo tanto, no se vern afectadas por una
transferencia con sacudidas.
Sin sacudidas Las salidas lgicas O.1 y O.2 no se ven afectadas y permanecen en su posicin
original hasta que se produce la siguiente seal vlida. El motor no se detiene.
Si la configuracin del controlador LTM R es: Entonces el modo de control cambia de control a
distancia a control local y el motor:
3 hilos sin sacudidas Sigue funcionando
2 hilos sin sacudidas Sigue funcionando si las entradas lgicas I.1 o I.2 estn
activadas
3 hilos con sacudidas Se para
2 hilos con sacudidas
Funciones de control del motor
188 1639505 06/2009
Cuando el controlador LTM R cambia de control local a control a distancia (I.6=0 a
I.6=1), el estado del motor en modo de control local, tanto si est en marcha como
parado, se mantiene sin cambios. El modo de transferencia de control seleccionado
no afecta al estado del motor, ya que el controlador LTM R slo tiene en cuenta el
ltimo comando de control (salida lgica O.1 u O.2) enviado por el PLC.
Cada vez que se cambia el canal de control a Bornero de conexin, no se puede
detener el funcionamiento del controlador LTM R desde los terminales porque no se
ha asignado ninguna entrada de terminal a un comando de parada.
Si no se desea este comportamiento, el canal de control se debe cambiar a Red o
a HMI local para ordenar una parada. Para implementar este cambio, lleve a cabo
uno de los siguientes pasos preventivos:
El responsable de la puesta en servicio debe configurar el controlador LTM R
para la transferencia del canal de control con sacudidas o para el control de 2
hilos.
El instalador debe proporcionar al controlador LTM R los medios para interrumpir
la llegada de corriente a la bobina del contactor, por ejemplo, una estacin de
pulsador conectada en serie con las salidas del controlador LTM R.
El ingeniero de control debe asignar una entrada de terminal para desactivar la
orden de marcha mediante las asignaciones del modo de configuracin
personalizado.
ATENCIN
ERROR DE PARADA Y RIESGO DE FUNCIONAMIENTO NO DESEADO
El funcionamiento del controlador LTM R no se puede detener desde los
terminales cuando el canal de control cambia a Bornero de conexin si el
controlador LTM R est en las siguientes situaciones:
funciona en modo de sobrecarga
- y -
est configurado sin sacudidas
- y -
se utiliza a travs de una red que usa el canal de control de red
- y -
funciona en estado de marcha
- y -
est configurado para el control de 3 hilos (impulso).
Consulte las instrucciones a continuacin.
Si no se siguen estas instrucciones pueden producirse lesiones personales
o daos en el equipo.
Funciones de control del motor
1639505 06/2009 189
Transiciones de recuperacin
El controlador LTM R entra en estado de recuperacin cuando se pierde la
comunicacin con el origen de control y sale de l cuando se restablece la
comunicacin. La transicin al estado de recuperacin y fuera de l tiene lugar de
la manera siguiente:
Para obtener informacin sobre cmo configurar los parmetros de recuperacin de
las comunicaciones, consulte el apartado Prdida de comunicacin.
Al utilizar la LTM CU, los parmetros Modo de transferencia de control y Control de
transicin directa se establecen en el registro de ajuste de control.
Transicin Transferencia del origen de control
Entrada al estado de
recuperacin
Sin sacudidas, cuando el bit de control de transicin directa est activado
Salida del estado de
recuperacin
Viene determinada por los ajustes del modo de transferencia de control (con o sin
sacudidas) y el control de transicin directa (activado o desactivado)
Funciones de control del motor
190 1639505 06/2009
Estados de funcionamiento
Introduccin
El controlador LTM R responde a los estados del motor y proporciona las funciones
de control, supervisin y proteccin adecuadas para cada uno de ellos. Un motor
puede tener muchos estados de funcionamiento. Algunos son permanentes, otros
transitorios.
Los estados de funcionamiento principales de un motor son:
Estado de
funcionamiento
Descripcin
Listo El motor est parado.
El controlador LTM R:
no detecta fallos
no realiza descargas
no realiza la cuenta atrs del temporizador del ciclo rpido
est listo para arrancar
No listo El motor est parado.
El controlador LTM R:
detecta un fallo
realiza la descarga
realiza la cuenta atrs del temporizador del ciclo rpido
Arranque El motor arranca.
El controlador LTM R:
detecta que la corriente ha alcanzado el umbral de corriente en nivel
detecta que la corriente no ha cruzado ni ha vuelto a cruzar el umbral de fallo por
arranque prolongado
sigue la cuenta atrs del temporizador de fallo de arranque prolongado
Marcha El motor est en marcha.
El controlador LTM R detecta que la corriente ha cruzado y ha vuelto a cruzar el umbral
de fallo por arranque prolongado antes de que el controlador LTM R haya realizado por
completo la cuenta atrs del temporizador de fallo por arranque prolongado.
Funciones de control del motor
1639505 06/2009 191
Grfica de estados de funcionamiento
A continuacin se describen los estados de funcionamiento del firmware del
controlador LTM R conforme el motor pasa del estado desactivado al estado de
marcha. El controlador LTM R comprueba la corriente en cada uno de los estados
de funcionamiento. Desde cualquier estado de funcionamiento, el LTM R puede
pasar a una condicin de fallo interno.
Funciones de control del motor
192 1639505 06/2009
Supervisin de proteccin a travs de los estados de funcionamiento
A continuacin se describen los estados de funcionamiento del motor, y las
protecciones de fallo y advertencia que proporciona el controlador LTM R mientras
el motor est en cada uno de ellos (se indica con una X). Desde cualquier estado
de funcionamiento, puede pasar a una condicin de fallo interno.
Categora de proteccin Fallo/alarma supervisados Estados de funcionamiento
Config.
sistema
Listo No listo Arranque Marcha
Diagnstico Comprobacin del comando
de marcha
X
Comprobacin del comando
de parada
X X X
Verificacin del
funcionamiento del motor
X X
Verificacin de parada X X
Errores de cableado/
configuracin
Conexin del PTC X X X X
Inversin de CT X
Prdida de tensin de fase X X
Configuracin de fase X
Fallos internos Leves X X X X X
Graves X X X X X
Motor-sensor de temperatura PTC binario X X X X
PT100 X X X X
PTC analgico X X X X
NTC analgico X X X X
Sobrecarga trmica Definida X
Trmica inversa X X X X
X Supervisado
No supervisado
Funciones de control del motor
1639505 06/2009 193
Corriente Arranque prolongado X
Agarrotamiento X
Desequilibrio de corrientes
de fase
X X
Prdida de corriente de fase X X
Sobrecorriente X
Infracorriente X
Fallo a tierra (interno) X X
Fallo a tierra (externo) X X
Tensin Nivel de sobretensin X X X
Nivel de infratensin X X X
Desequilibrio de tensiones
de fase
X X
Potencia / Factor de potencia Nivel de factor de potencia
excesivo
X
Nivel de factor de potencia
insuficiente
X
Nivel de potencia excesiva X
Nivel de potencia
insuficiente
X
Categora de proteccin Fallo/alarma supervisados Estados de funcionamiento
Config.
sistema
Listo No listo Arranque Marcha
X Supervisado
No supervisado
Funciones de control del motor
194 1639505 06/2009
Ciclo de arranque
Descripcin
El ciclo de arranque es el perodo de tiempo permitido para que el motor alcance su
nivel FLC normal. El controlador LTM R mide el ciclo de arranque en segundos, a
partir del momento en el que detecta la corriente en nivel, definida como la corriente
de fase mxima igual al 10% de FLC.
Durante el ciclo de arranque, el controlador LTM R compara:
la corriente detectada con el parmetro configurable Arranque prolongado-
umbral de fallo, y
el tiempo del ciclo de arranque transcurrido con el parmetro configurable
Arranque prolongado-tiempo sobrepasado de fallo.
Existen 3 situaciones de arranque prolongado, basadas cada una de ellas en el
nmero de veces, 0, 1 o 2, que la corriente de fase mxima cruza el valor de
Arranque prolongado-umbral de fallo. A continuacin se describen estas
situaciones.
Para obtener informacin acerca de los histricos que conserva el controlador
LTM R en los que se describen los arranques del motor, consulte Contadores de
arranque del motor, pgina 76. Para obtener informacin acerca de la funcin de
proteccin contra arranque prolongado, consulte Arranque prolongado, pgina 111.
Estados de funcionamiento del ciclo de arranque
Durante el ciclo de arranque, el controlador LTM R pasa por los siguientes estados
de funcionamiento del motor:
Paso Evento Estado de funcionamiento
1 El controlador LTM R recibe una seal de entrada de comando de arranque. Listo
2 El controlador LTM R confirma que se dan todas las condiciones previas al
arranque (es decir, no hay fallos, descargas ni temporizador de ciclo rpido).
Listo
3 El controlador LTM R cierra los contactos de salida adecuados designados
como terminales 13-14 o 23-24 y, por lo tanto, cierra el circuito de control de
los contactores de arranque del motor.
Listo
4 El controlador LTM R detecta que la corriente de fase mxima supera el
umbral de Corriente en nivel.
Arranque
5 El controlador LTM R detecta que la corriente se eleva por encima y
desciende por debajo del valor de Arranque prolongado-umbral de fallo
antes de que venza el temporizador de Arranque prolongado-tiempo
sobrepasado de fallo.
Marcha
Funciones de control del motor
1639505 06/2009 195
Umbral cruzado 2 veces
En esta situacin, el ciclo de arranque se ejecuta correctamente:
La corriente se eleva por encima, y luego desciende por debajo, del umbral de
fallo.
El controlador LTM R informa del tiempo real del ciclo de arranque, es decir, del
tiempo transcurrido desde la deteccin de la corriente en nivel hasta que la
corriente de fase mxima desciende por debajo del umbral de fallo.
Ciclo de arranque con el umbral cruzado 2 veces, un solo paso:
Is Arranque prolongado-umbral de fallo
Ciclo de arranque con el umbral cruzado 2 veces, 2 tiempos:
Funciones de control del motor
196 1639505 06/2009
Umbral cruzado 1 vez
En esta situacin, el ciclo de arranque falla:
La corriente se eleva por encima, pero desciende por debajo, del valor de
Arranque prolongado-umbral de fallo.
Si la proteccin contra arranque prolongado est activada, el controlador LTM R
indica un fallo cuando se alcanza el valor de Arranque prolongado-tiempo
sobrepasado de fallo.
Si la proteccin contra arranque prolongado est desactivada, el controlador
LTM R no indica un fallo y el ciclo de marcha comienza una vez que ha vencido
el valor de Arranque prolongado-tiempo sobrepasado de fallo.
Otras funciones de proteccin del motor comienzan sus perodos de duracin
respectivos una vez transcurrido el valor de Arranque prolongado-tiempo
sobrepasado de fallo.
El controlador LTM R informa de un tiempo de ciclo de arranque de 9999, que
indica que la corriente ha superado y permanece por encima del umbral de fallo.
El controlador LTM R informa de la corriente mxima detectada durante el ciclo
de arranque.
Ciclo de arranque con el umbral cruzado 1 vez:
Funciones de control del motor
1639505 06/2009 197
Umbral cruzado 0 vez
En esta situacin, el ciclo de arranque falla:
La corriente nunca se eleva por encima del umbral de fallo.
Si la proteccin contra arranque prolongado est activada, el controlador LTM R
indica un fallo cuando se alcanza el valor de Arranque prolongado-tiempo
sobrepasado de fallo.
Si la proteccin contra arranque prolongado est desactivada, el controlador
LTM R no indica un fallo y el ciclo de marcha comienza una vez que ha vencido
el valor de Arranque prolongado-tiempo sobrepasado de fallo.
Otras funciones de proteccin del motor comienzan sus perodos de duracin
respectivos una vez transcurrido el valor de Arranque prolongado-tiempo
sobrepasado de fallo.
El controlador LTM R informa del tiempo del ciclo de arranque y de la corriente
mxima detectada durante el ciclo de arranque como 0000, lo que indica que la
corriente nunca ha alcanzado el umbral de fallo.
Ciclo de arranque con el umbral cruzado 0 vez:
Is Arranque prolongado-umbral de fallo
Funciones de control del motor
198 1639505 06/2009
4.2 Modos de funcionamiento
Descripcin general
El controlador LTM R se puede configurar con 1 de 10 modos de funcionamiento
predefinidos. Seleccionar el modo de funcionamiento personalizado le permite
elegir uno de los 10 modos de funcionamiento predefinidos y adaptarlo a su
aplicacin especfica, o crear un programa de control completamente nuevo.
La seleccin de un modo de funcionamiento predefinido determina el comporta-
miento de todas las entradas y salidas del controlador LTM R.
Cada seleccin de un modo de funcionamiento predefinido incluye una seleccin
del cableado de control:
2 hilos (mantenido) o
3 hilos (impulso)
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Principios de control 199
Modos de funcionamiento predefinidos 201
Cableado de control y gestin de fallos 205
Modo de funcionamiento de sobrecarga 207
Modo de funcionamiento independiente 210
Modo de funcionamiento de 2 sentidos de marcha 214
Modo de funcionamiento de dos tiempos 218
Modo de funcionamiento de dos velocidades 224
Modo de funcionamiento personalizado 229
Funciones de control del motor
1639505 06/2009 199
Principios de control
Descripcin general
El controlador LTM R realiza funciones de supervisin y control de motores
elctricos monofsicos y trifsicos.
Estas funciones estn predefinidas y se instalan en las aplicaciones de uso ms
frecuente. Estn listas para su uso y se implementan con un sencillo ajuste de
los parmetros una vez que ha tenido lugar la puesta en marcha del controlador
LTM R.
Las funciones predefinidas de supervisin y control se pueden adaptar a las
necesidades particulares mediante el editor de lgica personalizada del software
PowerSuite para:
editar las funciones de proteccin
cambiar el funcionamiento de las funciones de supervisin y control
modificar la lgica de E/S predeterminada del controlador LTM R
Principio de funcionamiento
El procesamiento de las funciones de supervisin y control consta de 3 partes:
Captura de los datos de entrada:
el resultado del procesamiento de la funcin de proteccin
datos de la lgica externa de las entradas lgicas
comandos de telecomunicacin (TC) recibidos del origen de control
Procesamiento de la lgica mediante la funcin de supervisin o de control.
Utilizacin de los resultados del procesamiento:
activacin de las salidas lgicas
visualizacin de los mensajes predefinidos
activacin de los LED
seales de telecomunicacin (ST) enviadas a travs de un enlace de
comunicacin
Funciones de control del motor
200 1639505 06/2009
A continuacin se muestra el proceso de la funcin de supervisin y control:
Entradas y salidas lgicas
El controlador LTM R proporciona 6 entradas lgicas, 2 salidas lgicas, 1 rel de
advertencia y 1 rel de fallo. Cuando se aade un mdulo de expansin, se agregan
otras 4 entradas lgicas.
Al seleccionar un modo de funcionamiento predefinido se asignan automticamente
las entradas lgicas a funciones y se define la relacin entre entradas y salidas
lgicas. Con el editor de lgica personalizada, es posible cambiar estas
asignaciones.
Funciones de control del motor
1639505 06/2009 201
Modos de funcionamiento predefinidos
Descripcin general
El controlador LTM R se puede configurar en 1 de 10 modos de funcionamiento
predefinidos. Cada modo de funcionamiento est diseado para satisfacer los
requisitos de una configuracin de aplicacin comn.
Al seleccionar un modo de funcionamiento, se especifica:
el tipo de modo de funcionamiento, que determina la relacin entre las entradas
y las salidas lgicas, y
el tipo de circuito de control, que determina el comportamiento de las entradas
lgicas, segn el diseo del cableado de control
Tipos de modos de funcionamiento
Existen 10 tipos de modos de funcionamiento:
Tipo de modo de
funcionamiento
Uso ms adecuado para:
Sobrecarga
(vase pgina 207)
Todas las aplicaciones del controlador de motores en las que el usuario define la
asignacin de:
Las entradas lgicas I.1, I.2, I.3 e I.4
Las salidas lgicas O.1 y O.2
Los comandos de parada, Aux1 y Aux2 del HMI XBTN410
La E/S se puede definir mediante un programa de control gestionado por el controlador
de red maestro en control a distancia, a travs de una herramienta HMI o por medio de
una lgica personalizada.
Independiente
(vase pgina 210)
Aplicaciones de arranque del motor a plena tensin en la lnea con un sentido de
marcha
2 sentidos de marcha
(vase pgina 214)
Aplicaciones de arranque del motor a plena tensin en la lnea con 2 sentidos de
marcha
Dos tiempos
(vase pgina 218)
Aplicaciones de arranque del motor de tensin reducida:
Estrella-tringulo
Resistencia principal de transicin abierta
Autotransformador de transicin abierta
Dos velocidades
(vase pgina 224)
Aplicaciones de motor de dos velocidades, por ejemplo:
Dahlander (polo consecuente)
Inversor de polaridad
Funciones de control del motor
202 1639505 06/2009
Comportamiento de las entradas lgicas
Cuando se selecciona un modo de funcionamiento, tambin se especifica que las
entradas lgicas se cableen para el control de 2 hilos (mantenido) o de 3 hilos
(impulso). La seleccin determina los comandos de arranque y parada vlidos de
los diversos orgenes de control, y define el comportamiento del comando de
entrada que sigue al regreso de la alimentacin despus de un apagn:
Las asignaciones de lgica de control de las entradas lgicas I.1, I.2, I.3 e I.4 se
describen en cada uno de los modos de funcionamiento predefinidos del motor.
NOTA: En el canal de control de red, los comandos de red se comportan como
comandos de control de 2 hilos, con independencia del tipo de circuito de control
del modo de funcionamiento seleccionado. Para obtener informacin acerca de los
canales de control, consulte Canales de control, pgina 185.
Tipo de circuito de control Comportamiento de las entradas lgicas I.1 e I.2
2 hilos (mantenido) El controlador LTM R, tras detectar el flanco ascendente en la entrada asignada para
arrancar el motor, emite un comando de marcha. El comando de marcha slo
permanece activo mientras la entrada est activa. La seal no se guarda.
3 hilos (impulso) El controlador LTM R:
tras detectar el flanco ascendente en la entrada asignada para arrancar el motor,
guarda el comando de marcha y
tras un comando de parada, desactiva el comando de marcha para desactivar el
rel de salida cableado en serie con la bobina del contactor que enciende o apaga
el motor
despus de una parada, debe detectar un flanco ascendente en la entrada para
guardar el comando de marcha
Funciones de control del motor
1639505 06/2009 203
En cada modo de funcionamiento predefinido, las entradas lgicas I.3, I.4, I.5 e I.6
se comportan de la manera siguiente:
Entrada lgica Comportamiento
I.3 Cuando se configura para utilizarse como la entrada lista del sistema externo (activacin
de lectura externa de la entrada lgica 3 = 1), esta entrada indica el estado del sistema
(Listo o no):
Si I.3 = 0, el sistema externo no est listo. El bit Sistema-listo (455.0) se fija en 0.
Si I.3 = 1, el sistema externo est listo. El bit Sistema-listo (455.0) se puede fijar en 1
en funcin de otras condiciones del sistema.
Cuando no se configura para utilizarse como entrada lista del sistema externo (activacin
de lectura externa de la entrada lgica 3 = 0), el usuario define esta entrada y solo fija un
bit en un registro.
I.4 En control de 3 hilos (impulso): un comando de parada. Tenga en cuenta que este
comando de parada se puede desactivar en el control del bornero de conexin utilizando
el bit 11 del registro 683.
En control de 2 hilos (mantenido): una entrada definida por el usuario que se puede
configurar para enviar informacin a una direccin PLC a travs de la red.
Nota: En el modo de funcionamiento de sobrecarga, la entrada lgica I.4 no se utiliza y puede
definirla el usuario.
I.5 Un comando de rearme tras fallo se reconoce cuando esta entrada recibe el flanco
ascendente de una seal.
Nota: Primero esta entrada se debe volver inactiva y, a continuacin, recibir el flanco
ascendente de una seal posterior para que tenga lugar otro rearme.
I.6 Control local/a distancia de las salidas del controlador LTM R:
Activo: Control a distancia (puede estar asociado a cualquier canal de control).
Inactivo: Control local a travs del bornero de conexin o el puerto HMI, segn determine
el parmetro Control de ajuste de canal local.
ADVERTENCIA
PRDIDA DE PROTECCIN DEL MOTOR EN CONTROL HMI
Si la parada del bornero de conexin est desactivada, la salida de fallo (terminal
NC 95-96) debe estar cableada en serie con la bobina del contactor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Funciones de control del motor
204 1639505 06/2009
Comportamiento de las salidas lgicas
El comportamiento de las salidas lgicas O.1 y O.2 viene determinado por el modo
de funcionamiento seleccionado. Consulte los temas que vienen a continuacin
para ver una descripcin de los 10 tipos de modos de funcionamiento predefinidos
y el comportamiento de las salidas lgicas O.1 y O.2.
Cuando el controlador LTM R ha perdido la comunicacin con la red o el HMI, el
controlador LTM R entra en una condicin de recuperacin. En esta condicin,
cuando recibe un comando de parada, las salidas lgicas O.1 y O.2 se comportan
de la manera siguiente:
Para obtener ms informacin sobre cmo configurar los parmetros de
recuperacin, consulte el apartado Condicin de recuperacin incluido en el tema
Prdida de comunicacin.
En todos los tipos de modos de funcionamiento, las siguientes salidas lgicas se
comportan como se describe a continuacin:
Tipo de circuito de control Respuesta de las salidas lgicas O.1 y O.2 a un comando de parada
2 hilos (mantenido) Un comando de parada anula la condicin de recuperacin y desactiva las salidas
lgicas O.1 y O.2 mientras est activo. Cuando deja de estarlo, las salidas lgicas O.1
y O.2 vuelven al estado de recuperacin programado.
3 hilos (impulso) Un comando de parada anula la condicin de recuperacin y desactiva las salidas
lgicas O.1 y O.2. Las salidas permanecen desactivadas una vez eliminado el
comando de parada y no vuelven a su estado de recuperacin programado.
Salida lgica Comportamiento
O.3 Se activa con cualquier advertencia de proteccin activada:
Terminales NA 33-34
O.4 Se activa con cualquier fallo de proteccin activado:
Terminales NC 95-96
Terminales NA 97-98
Nota: Cuando la tensin de control es excesivamente baja o est desactivada:
Se abren los NC 95-96
Se cierran los NA 97-98
Funciones de control del motor
1639505 06/2009 205
Cableado de control y gestin de fallos
Descripcin general
Cuando se selecciona el modo de funcionamiento predefinido de sobrecarga, el
controlador LTM R no guarda los comandos de salida lgica a no ser que as lo
ordene un programa de control maestro de PLC o el programa de lgica
personalizada del controlador LTM R.
En el caso de todos los dems modos de funcionamiento predefinidos,
Independiente, 2 sentidos de marcha, 2 tiempos y 2 velocidades, la lgica de control
predefinida del controlador LTM R est diseada para satisfacer los objetivos de
muchas aplicaciones de arranque de motor comunes. Aqu se incluira la gestin del
comportamiento del motor en respuesta a:
acciones de arranque y parada, y
acciones de fallo y rearme
Como el controlador LTM R se puede utilizar en aplicaciones especiales, como
bombas contraincendios que requieren que el motor funcione a pesar de una
condicin de fallo externo conocida, la lgica de control predefinida est diseada
para que sea el circuito de control, y no ella, quien determine cmo interrumpe el
controlador LTM R el flujo de corriente a la bobina del contactor.
Accin de lgica de control en arranques y paradas
La lgica de control predefinida acta tras los comandos de arranque y parada de
la siguiente manera:
En diagramas de cableado de control de 3 hilos (impulso), cuando la entrada 4
est configurada como comando de parada, el controlador LTM R debe detectar
la corriente de entrada en la entrada lgica I.4 para poder actuar sobre un
comando de arranque.
Si la entrada lgica I.4 est activa y la accin de arranque de un usuario inicia la
corriente en las entradas lgicas I.1 o I.2, el controlador LTM R detecta el flanco
ascendente de la corriente y establece un comando de memorizacin interna
(firmware) que indica a la salida de rel adecuada que se cierre y permanezca
cerrada hasta que se desactive dicho comando.
Una accin de parada que interrumpe la corriente en la entrada lgica I.4 hace
que el controlador LTM R desactive el comando de memorizacin. La
desactivacin de la memorizacin del firmware hace que la salida se abra, y
permanezca abierta, hasta la siguiente condicin de arranque vlida.
En diagramas de cableado de control de 2 hilos (mantenido), el controlador
LTM R detecta la presencia de corriente en las entradas lgicas I.1 o I.2 como
comandos de arranque, y la ausencia de corriente desactiva el comando de
arranque.
Funciones de control del motor
206 1639505 06/2009
Accin de lgica de control en fallos y rearmes
La lgica de control predefinida gestiona los fallos y los comandos de rearme de la
manera siguiente:
La salida lgica O.4 se abre en respuesta a una condicin de fallo.
La salida lgica O.4 se cierra en respuesta a un comando de rearme.
La lgica de control y el cableado de control gestionan juntos los fallos
Los circuitos de control, mostrados en los diagramas de cableado de este captulo
y en el Apndice, indican cmo la lgica de control y el circuito de control del
controlador LTM R actan de forma combinada para parar un motor en respuesta a
un fallo:
En circuitos de control de 3 hilos (impulso), la estrategia de control vincula el
estado de la salida lgica O.4 con el estado de la corriente en la entrada lgica
I.4:
La lgica de control abre la salida lgica O.4 en respuesta a un fallo.
La apertura de la salida lgica O.4 interrumpe la corriente en la entrada lgica
I.4, y desactiva el comando de memorizacin de la lgica de control en la
salida lgica O.1.
La salida lgica O.1 se abre, debido a la lgica de control descrita
anteriormente, y detiene el flujo de corriente a la bobina del contactor.
Para rearrancar el motor, es necesario poner a cero el fallo y emitir un nuevo
comando de arranque.
En circuitos de control de 2 hilos (mantenido), la estrategia de control vincula el
estado de la salida lgica O.4 directamente con las entradas lgicas I.1 o I.2.
La lgica de control abre la salida lgica O.4 en respuesta a un fallo.
La apertura de la salida lgica O.4 interrumpe el flujo de corriente a las
entradas lgicas I.1 o I.2.
La lgica de control desactiva los comandos de arranque que abren las
salidas lgicas O.1 u O.2.
Para rearrancar el motor, el fallo se debe poner a cero y el estado de los
operadores de arranque/parada determina el estado de las entradas lgicas I.1
o I.2.
Los circuitos de control necesarios para el funcionamiento de un motor, durante un
fallo de proteccin del motor, no se muestran en los diagramas de cableado que se
ilustran a continuacin. No obstante, la estrategia de control no vincula el estado de
la salida lgica O.4 con el estado de los comandos de entrada. De esta manera, se
pueden anunciar las condiciones de fallo, mientras la lgica de control sigue
gestionando los comandos de arranque y parada.
Funciones de control del motor
1639505 06/2009 207
Modo de funcionamiento de sobrecarga
Descripcin
Utilice el modo de funcionamiento de sobrecarga cuando sea necesario supervisar
la carga del motor y otro mecanismo distinto al controlador LTM R lleve a cabo el
control de la carga del motor (arranque/parada).
Caractersticas funcionales
El modo de funcionamiento de sobrecarga incluye las siguientes caractersticas:
Slo es accesible en el canal de control de red.
La salida lgica O.4 se abre en respuesta a un error de diagnstico.
El controlador LTM R establece un bit en una palabra de estado cuando detecta
una seal activa en:
las entradas lgicas I.1, I.2, I.3 o I.4, o
los botones Aux 1, Aux 2 o de parada del teclado de HMI
Nota: Cuando se establece un bit en la palabra de estado de entrada, puede
leerlo un PLC que puede escribir un bit en la palabra de comando del controlador
LTM R. Cuando el controlador LTM R detecta un bit en su palabra de comando,
puede activar la salida (o salidas) respectiva.
NOTA: El controlador LTM R no guardar los comandos de salida lgica a menos
que as lo ordene un programa de control maestro de PLC o un programa de lgica
personalizada.
Funciones de control del motor
208 1639505 06/2009
Diagrama de aplicacin de sobrecarga
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin de sobrecarga de control de bornero de
conexin de 3 hilos (impulso).
Para ver ms ejemplos de diagramas IEC del modo de funcionamiento de
sobrecarga, consulte Diagramas de cableado del modo de sobrecarga, pgina 610.
Para ver ejemplos de diagramas NEMA del modo de funcionamiento de sobrecarga,
consulte Diagramas de cableado del modo de sobrecarga, pgina 630.
Funciones de control del motor
1639505 06/2009 209
Asignacin de E/S
El modo de funcionamiento de sobrecarga proporciona las siguientes entradas
lgicas:
El modo de funcionamiento de sobrecarga proporciona las siguientes salidas
lgicas:
El modo de funcionamiento de sobrecarga utiliza las siguientes teclas de HMI:
Parmetros
En el modo de funcionamiento de sobrecarga no se necesitan ajustes de los
parmetros asociados.
Entradas lgicas Asignacin
I.1 Libre
I.2 Libre
I.3 Libre
I.4 Libre
I.5 Rearme
I.6 Local (0) o A distancia (1)
Salidas lgicas Asignacin
O.1 (13 y 14) Responde a los comandos de control de red
O.2 (23 y 24) Responde a los comandos de control de red
O.3 (33 y 34) Seal de advertencia
O.4 (95, 96, 97 y 98) Seal de fallo
Teclas de HMI Asignacin
Aux 1 Libre
Aux 2 Libre
Parada Libre
Funciones de control del motor
210 1639505 06/2009
Modo de funcionamiento independiente
Descripcin
Utilice el modo de funcionamiento independiente en aplicaciones de arranque del
motor a plena tensin en la lnea con un sentido de marcha.
Caractersticas funcionales
Esta funcin incluye las siguientes caractersticas:
Accesible en 3 canales de control: Bornero de conexin, HMI y Red.
El controlador LTM R no gestiona la relacin entre las salidas lgicas O.1 y O.2.
En el canal de control de bornero de conexin, la entrada lgica I.1 controla la
salida lgica O.1 y la entrada lgica I.2 la salida lgica O.2.
En los canales de control de red o HMI, el parmetro Motor-comando de
funcionamiento hacia delante controla la salida lgica O.1 y el parmetro Salida
lgica 2-comando la salida lgica O.2.
La entrada lgica I.3 no se utiliza en el circuito de control, pero se puede
configurar para establecer un bit en la memoria.
Las salidas lgicas O.1 y O.2 se desactivan, y el motor se para, cuando la tensin
de control se vuelve demasiado baja.
Las salidas lgicas O.1 y O.4 se desactivan, y el motor se para, en respuesta a
un error de diagnstico.
NOTA: Consulte Cableado de control y gestin de fallos, pgina 205 para obtener
ms informacin acerca de la interaccin entre:
la lgica de control predefinida del controlador LTM R y
el cableado de control, del cual se muestra un ejemplo en el siguiente diagrama
Funciones de control del motor
1639505 06/2009 211
Diagrama de aplicacin independiente
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin independiente de control de bornero de
conexin de 3 hilos (impulso).
Para ver ms ejemplos de diagramas IEC del modo de funcionamiento
independiente, consulte Diagramas de cableado del modo independiente,
pgina 614.
Para ver ejemplos de diagramas NEMA del modo de funcionamiento independiente,
consulte Diagramas de cableado del modo independiente, pgina 634.
Funciones de control del motor
212 1639505 06/2009
Asignacin de E/S
El modo de funcionamiento independiente proporciona las siguientes entradas
lgicas:
El modo de funcionamiento independiente proporciona las siguientes salidas
lgicas:
El modo de funcionamiento independiente utiliza las siguientes teclas de HMI:
Entradas lgicas Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
I.1 Arrancar/Parar motor Arrancar motor
I.2 Abrir/Cerrar O.2 Cerrar O.2
I.3 Libre Libre
I.4 Libre Parar motor y abrir O.1 y O.2
I.5 Rearme Rearme
I.6 Local (0) o A distancia (1) Local (0) o A distancia (1)
Salidas lgicas Asignacin
O.1 (13 y 14) Control de contactor KM1
O.2 (23 y 24) Controlado por I.2
O.3 (33 y 34) Seal de advertencia
O.4 (95, 96, 97 y 98) Seal de fallo
Teclas de HMI Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
Aux 1 Controlar motor Arrancar motor
Aux 2 Controlar O.2 Cerrar O.2
Parada Parar motor y abrir O.2 mientras se presiona Parar motor y abrir O.2
Funciones de control del motor
1639505 06/2009 213
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo del modo de
funcionamiento independiente. En l se muestran las entradas y salidas de una
configuracin de 3 hilos (impulso):
1 Funcionamiento normal
2 Comando de arranque ignorado: comando de parada activo
Parmetros
En el modo de funcionamiento independiente no se necesita ningn parmetro
asociado.
Funciones de control del motor
214 1639505 06/2009
Modo de funcionamiento de 2 sentidos de marcha
Descripcin
Utilice el modo de funcionamiento de 2 sentidos de marcha en aplicaciones de
arranque del motor a plena tensin en la lnea con 2 sentidos de marcha.
Caractersticas funcionales
Esta funcin incluye las siguientes caractersticas:
Accesible en 3 canales de control: Bornero de conexin, HMI y Red.
El enclavamiento del firmware impide la activacin simultnea de las salidas
lgicas O.1 (hacia delante) y O.2 (hacia atrs): en el caso de comandos
simultneos de marcha hacia delante y hacia atrs, slo se activa la lgica de
salida O.1 (hacia delante).
El controlador LTM R puede cambiar la direccin de hacia delante a hacia atrs
y viceversa en 1 de 2 modos:
Modo de transicin estndar: el bit de control de transicin directa est
desactivado. Este modo necesita un comando de parada seguido de la cuenta
atrs del temporizador ajustable Motor-tiempo sobrepasado de transicin
(contra efecto de retroceso).
Modo de transicin directa: el bit de control de transicin directa est activado.
Este modo cambia automticamente despus de la cuenta atrs del
temporizador ajustable Motor-tiempo sobrepasado de transicin (contra
efecto de retroceso).
En el canal de control de bornero de conexin, la entrada lgica I.1 controla la
salida lgica O.1 y la entrada lgica I.2 la salida lgica O.2.
En los canales de control de red o HMI, el parmetro Motor-comando de
funcionamiento hacia delante controla la salida lgica O.1 y el comando Motor-
comando de funcionamiento hacia atrs controla la salida lgica O.2.
La entrada lgica I.3 no se utiliza en el circuito de control, pero se puede
configurar para establecer un bit en la memoria.
Las salidas lgicas O.1 y O.2 se desactivan, y el motor se para, cuando la tensin
de control se vuelve demasiado baja.
Las salidas lgicas O.1, O.2 y O.4 se desactivan, y el motor se para, en
respuesta a un error de diagnstico.
NOTA: Consulte Cableado de control y gestin de fallos, pgina 205 para obtener
ms informacin acerca de la interaccin entre:
la lgica de control predefinida del controlador LTM R y
el cableado de control, del cual se muestra un ejemplo en el siguiente diagrama
Funciones de control del motor
1639505 06/2009 215
Diagrama de aplicacin de 2 sentidos de marcha
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin de 2 sentidos de marcha de control de bornero
de conexin de 3 hilos (impulso).
1 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el firmware
del controlador LTM R enclava O.1 y O.2.
Para ver ms ejemplos de diagramas IEC del modo de funcionamiento de 2
sentidos de marcha, consulte Diagramas de cableado del modo de 2 sentidos de
marcha, pgina 616.
Para ver ejemplos de diagramas NEMA del modo de funcionamiento de 2 sentidos
de marcha, consulte Diagramas de cableado del modo de 2 sentidos de marcha,
pgina 636.
Funciones de control del motor
216 1639505 06/2009
Asignacin de E/S
El modo de funcionamiento de 2 sentidos de marcha proporciona las siguientes
entradas lgicas:
El modo de funcionamiento de 2 sentidos de marcha proporciona las siguientes
salidas lgicas:
El modo de funcionamiento de 2 sentidos de marcha utiliza las siguientes teclas de
HMI:
Entradas lgicas Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
I.1 Funcionamiento hacia delante Arrancar motor hacia delante
I.2 Funcionamiento hacia atrs Arrancar motor hacia atrs
I.3 Libre Libre
I.4 Libre Parar motor
I.5 Rearme Rearme
I.6 Local (0) o A distancia (1) Local (0) o A distancia (1)
Salidas lgicas Asignacin
O.1 (13 y 14) Control de contactor KM1 hacia delante
O.2 (23 y 24) Control de contactor KM2 hacia atrs
O.3 (33 y 34) Seal de advertencia
O.4 (95, 96, 97 y 98) Seal de fallo
Teclas de HMI Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
Aux 1 Funcionamiento hacia delante Arrancar motor hacia delante
Aux 2 Funcionamiento hacia atrs Arrancar motor hacia atrs
Parada Parar mientras se presiona Parar
Funciones de control del motor
1639505 06/2009 217
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo del modo de
funcionamiento de 2 sentidos de marcha. En l se muestran las entradas y salidas
de una configuracin de 3 hilos (impulso) cuando el bit de control de transicin
directa est activado:
1 Funcionamiento normal con comando de parada
2 Funcionamiento normal sin comando de parada
3 El comando de funcionamiento hacia delante se ignora: temporizador de transicin activo
4 El comando de funcionamiento hacia delante se ignora: comando de parada activo
Parmetros
El modo de funcionamiento de 2 sentidos de marcha tiene los siguientes
parmetros:
Parmetros Intervalo de ajuste Ajuste de fbrica
Motor-tiempo sobrepasado de transicin 0999,9 s 0,1 s
Control de transicin directa Activado/desactivado Desactivado
Funciones de control del motor
218 1639505 06/2009
Modo de funcionamiento de dos tiempos
Descripcin
Utilice el modo de funcionamiento de dos tiempos en aplicaciones de arranque del
motor a baja tensin, como por ejemplo:
Estrella-tringulo
Resistencia principal de transicin abierta
Autotransformador de transicin abierta
Caractersticas funcionales
Esta funcin incluye las siguientes caractersticas:
Accesible en 3 canales de control: Bornero de conexin, HMI y Red.
La configuracin del funcionamiento de dos tiempos incluye:
Un parmetro Motor-tiempo sobrepasado de paso 1 a 2 que se inicia cuando
la corriente alcanza el 10% de FLC min.
Un parmetro Motor-umbral de paso 1 a 2.
Un parmetro Motor-tiempo sobrepasado de transicin que se inicia despus
de los siguientes eventos, el que antes se produzca: caducidad del valor de
Motor-tiempo sobrepasado de 1 a 2, o descenso de la corriente por debajo del
valor de Motor-umbral de paso 1 a 2.
El enclavamiento del firmware impide la activacin simultnea de las salidas
lgicas O.1 (paso 1) y O.2 (paso 2).
En el canal de control de bornero de conexin, la entrada lgica I.1 controla las
salidas lgicas O.1 y O.2.
En los canales de control de red o HMI, el parmetro Motor-comando de
funcionamiento hacia delante controla las salidas lgicas O.1 y O.2. El parmetro
Motor-comando de funcionamiento hacia atrs se ignora.
Las salidas lgicas O.1 y O.2 se desactivan, y el motor se para, cuando la tensin
de control se vuelve demasiado baja.
Las salidas lgicas O.1, O.2 y O.4 se desactivan, y el motor se para, en
respuesta a un error de diagnstico.
NOTA: Consulte Cableado de control y gestin de fallos, pgina 205 para obtener
ms informacin acerca de la interaccin entre:
la lgica de control predefinida del controlador LTM R y
el cableado de control, del cual se muestra un ejemplo en los siguientes
diagramas
Funciones de control del motor
1639505 06/2009 219
Diagrama de la aplicacin estrella-tringulo de dos pasos
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin estrella-tringulo de dos tiempos de control de
bornero de conexin de 3 hilos (impulso).
1 Los contactos de enclavamiento de CN KM1 y KM3 no son obligatorios porque el
controlador LTM R enclava de forma electrnica O.1 y O.2.
Para ver ms ejemplos de diagramas IEC estrella-tringulo de dos pasos, consulte
Diagramas de cableado del modo estrella-tringulo de dos tiempos, pgina 618.
Para ver ms ejemplos de diagramas NEMA estrella-tringulo de dos tiempos,
consulte Diagramas de cableado del modo estrella-tringulo de dos tiempos,
pgina 638.
Funciones de control del motor
220 1639505 06/2009
Diagrama de la aplicacin de resistencia principal de dos tiempos
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin de resistencia principal de dos tiempos de
control de bornero de conexin de 3 hilos (impulso).
Para ver ms ejemplos de diagramas IEC de resistencia principal de dos tiempos,
consulte Diagramas de cableado del modo de resistencia principal de dos pasos,
pgina 620.
Para ver ms ejemplos de diagramas NEMA de resistencia principal de dos
tiempos, consulte Diagramas de cableado del modo de resistencia principal de dos
pasos, pgina 640.
Funciones de control del motor
1639505 06/2009 221
Diagrama de la aplicacin de autotransformador de dos tiempos
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin de autotransformador de dos tiempos de
control de bornero de conexin de 3 hilos (impulso).
1 Los contactos de enclavamiento de CN KM1 y KM3 no son obligatorios porque el
controlador LTM R enclava de forma electrnica O.1 y O.2.
Para ver ms ejemplos de diagramas IEC de autotransformador de dos tiempos,
consulte pgina 622.
Para ver ms ejemplos de diagramas NEMA de autotransformador de dos tiempos,
consulte pgina 642.
Funciones de control del motor
222 1639505 06/2009
Asignacin de E/S
El modo de funcionamiento de dos tiempos proporciona las siguientes entradas
lgicas:
El modo de funcionamiento de dos pasos proporciona las siguientes salidas lgicas:
El modo de funcionamiento de dos tiempos utiliza las siguientes teclas de HMI:
Entradas lgicas Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
I.1 Controlar motor Arrancar motor
I.2 Libre Libre
I.3 Libre Libre
I.4 Libre Parar motor
I.5 Rearme Rearme
I.6 Local (0) o A distancia (1) Local (0) o A distancia (1)
Salidas lgicas Asignacin
O.1 (13 y 14) Control de contactor paso 1
O.2 (23 y 24) Control de contactor paso 2
O.3 (33 y 34) Seal de advertencia
O.4 (95, 96, 97 y 98) Seal de fallo
Teclas de HMI Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
Aux 1 Controlar motor Arrancar motor
Aux 2 Libre Libre
Parada Parar motor mientras se presiona Parar motor
Funciones de control del motor
1639505 06/2009 223
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo del modo de
funcionamiento de dos tiempos. En l se muestran las entradas y salidas de una
configuracin de 3 hilos (impulso):
1 Funcionamiento normal
2 Paso 1 arranque
3 Paso 2 arranque
4 Comando de arranque ignorado: comando de parada activo
5 El descenso de la corriente por debajo del valor de Motor-umbral de paso 1 a 2 se ignora:
precedido de la caducidad del valor de Motor-tiempo sobrepasado de paso 1 a 2.
Parmetros
El modo de funcionamiento de dos tiempos tiene los siguientes parmetros:
Parmetro Intervalo de ajuste Ajuste de fbrica
Motor-tiempo sobrepasado
de paso 1 a 2
0,1999,9 s 5 s
Motor-tiempo sobrepasado
de transicin
0999,9 s 100 ms
Motor-umbral de paso 1 a 2 20-800% FLC en incrementos del 1% 150% FLC
Funciones de control del motor
224 1639505 06/2009
Modo de funcionamiento de dos velocidades
Descripcin
Utilice el modo de funcionamiento de dos velocidades en aplicaciones de motor de
dos velocidades para los siguientes tipos de motor:
Dahlander (polo consecuente)
Inversor de polaridad
Caractersticas funcionales
Esta funcin incluye las siguientes caractersticas:
Accesible en 3 canales de control: Bornero de conexin, HMI y Red.
El enclavamiento del firmware impide la activacin simultnea de las salidas
lgicas O.1 (baja velocidad) y O.2 (alta velocidad).
2 medidas de FLC:
FLC1 (Motor-relacin de corriente a plena carga) a baja velocidad
FLC2 (Motor-relacin de corriente a plena carga y alta velocidad) a alta
velocidad
El controlador LTM R puede cambiar de velocidad en 2 situaciones:
El bit de control de transicin directa est desactivado: es necesario un
comando de parada seguido de la caducidad del valor de Motor-tiempo
sobrepasado de transicin.
El bit de control de transicin directa est activado: cambia automticamente
de alta a baja velocidad despus de que se haya sobrepasado el tiempo del
valor ajustable de Motor-tiempo sobrepasado de transicin.
En el canal de control de bornero de conexin, la entrada lgica I.1 controla la
salida lgica O.1 y la entrada lgica I.2 la salida lgica O.2.
En los canales de control de red o HMI, cuando el parmetro Motor-comando de
funcionamiento hacia delante est establecido en 1 y:
El parmetro Motor-comando de baja velocidad est establecido en 1, la
salida lgica O.1 est activada.
El parmetro Motor-comando de baja velocidad est establecido en 0, la
salida lgica O.2 est activada.
La entrada lgica I.3 no se utiliza en el circuito de control, pero se puede
configurar para establecer un bit en la memoria.
Las salidas lgicas O.1 y O.2 se desactivan, y el motor se para, cuando la tensin
de control se vuelve demasiado baja.
Las salidas lgicas O.1, O.2 y O.4 se desactivan, y el motor se para, en
respuesta a un error de diagnstico.
NOTA: Consulte Cableado de control y gestin de fallos, pgina 205 para obtener
ms informacin acerca de la interaccin entre:
la lgica de control predefinida del controlador LTM R y
el cableado de control, del cual se muestra un ejemplo en los siguientes
diagramas
Funciones de control del motor
1639505 06/2009 225
Diagrama de la aplicacin Dahlander de dos velocidades
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin Dahlander de polo consecuente de dos
velocidades con control de bornero de conexin de 3 hilos (impulso).
1 Una aplicacin Dahlander requiere que dos juegos de cables pasen por las ventanas de
CT. El controlador LTM R tambin se puede colocar aguas arriba de los contactores. En
este caso, si el motor Dahlander se utiliza en modo de par variable, todos los cables aguas
abajo de los contactores deben ser del mismo tamao.
2 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el firmware
del controlador LTM R enclava O.1 y O.2.
Para ver ms ejemplos de diagramas IEC de Dahlander de dos velocidades,
consulte pgina 624.
Para ver ms ejemplos de diagramas NEMA de Dahlander de dos velocidades,
consulte pgina 644.
Funciones de control del motor
226 1639505 06/2009
Diagrama de la aplicacin de cambio de polarizacin de 2 velocidades
El siguiente diagrama de cableado representa un ejemplo simplificado del
controlador LTM R en una aplicacin de cambio de polarizacin de dos velocidades
con control de bornero de conexin de 3 hilos (impulso).
1 Una aplicacin de cambio de polarizacin requiere que 2 juegos de cables pasen por las
ventanas de CT. El controlador LTM R tambin se puede colocar aguas arriba de los
contactores. En este caso, todos los cables aguas abajo de los contactores deben ser del
mismo tamao.
2 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el firmware
del controlador LTM R enclava O.1 y O.2.
Para ver ms ejemplos de diagramas IEC de cambio de polarizacin, consulte
pgina 626.
Para ver ms ejemplos de diagramas NEMA de cambio de polarizacin, consulte
pgina 646.
Funciones de control del motor
1639505 06/2009 227
Asignacin de E/S
El modo de funcionamiento de dos velocidades proporciona las siguientes entradas
lgicas:
El modo de funcionamiento de dos velocidades proporciona las siguientes salidas
lgicas:
El modo de funcionamiento de dos velocidades utiliza las siguientes teclas de HMI:
Entradas lgicas Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
I.1 Comando de baja velocidad Arranque de baja velocidad
I.2 Comando de alta velocidad Arranque de alta velocidad
I.3 Libre Libre
I.4 Libre Parada
I.5 Rearme Rearme
I.6 Local (0) o A distancia (1) Local (0) o A distancia (1)
Salidas lgicas Asignacin
O.1 (13 y 14) Control de baja velocidad
O.2 (23 y 24) Control de alta velocidad
O.3 (33 y 34) Seal de advertencia
O.4 (95, 96, 97 y 98) Seal de fallo
Teclas de HMI Asignacin de 2 hilos (mantenidos) Asignacin de 3 hilos (impulso)
Aux 1 Control de baja velocidad Arranque de baja velocidad
Aux 2 Control de alta velocidad Arranque de alta velocidad
Parada Parar el motor Parar el motor
Funciones de control del motor
228 1639505 06/2009
Secuencia de tiempo
El siguiente diagrama es un ejemplo de la secuencia de tiempo del modo de
funcionamiento de dos velocidades. En l se muestran las entradas y salidas de una
configuracin de 3 hilos (impulso) cuando el bit de control de transicin directa est
activado:
1 Funcionamiento normal con comando de parada
2 Funcionamiento normal sin comando de parada
3 El comando de arranque de baja velocidad se ignora: el parmetro Motor-tiempo
sobrepasado de transicin est activo
4 El comando de arranque de baja velocidad se ignora: comando de parada activo
Parmetros
En la siguiente tabla se muestran los parmetros asociados con el modo de
funcionamiento de dos velocidades.
NOTA: El temporizador de baja a alta velocidad est fijado en 100 ms.
Parmetros Intervalo de ajuste Ajuste de fbrica
Motor-tiempo sobrepasado de transicin (alta a baja
velocidad)
0999,9 s 100 ms
Control de transicin directa Activado/desactivado Desactivado
Funciones de control del motor
1639505 06/2009 229
Modo de funcionamiento personalizado
Descripcin general
El modo de funcionamiento personalizado slo se puede implementar con el editor
de lgica personalizada del software PowerSuite.
Para seleccionar el modo de funcionamiento personalizado, inicie el control del
men del software de configuracin. Vaya a Settings Motor pgina Motor
Operating Mode y seleccione Custom como modo de funcionamiento.
Archivos de programa
Cada programa del controlador LTM R consta de dos archivos:
Un archivo de configuracin que contiene parmetros de configuracin.
Un archivo de lgica que contiene una serie de comandos lgicos que gestionan
el comportamiento del controlador LTM R, como por ejemplo:
comandos de arranque y parada del motor
transiciones del motor entre pasos, velocidades y direcciones
el origen de control vlido y las transiciones entre orgenes de control
lgica de fallos y advertencias de las salidas de rel 1 y 2, y el HMI
funciones de rearme de bornero de conexin
prdida y recuperacin de la comunicacin del PLC y el HMI
descarga
ciclo rpido
diagnsticos de arranque y parada del controlador LTM R
Cuando se selecciona un modo de funcionamiento predefinido, el controlador
LTM R aplica un archivo de lgica predefinida que reside de forma permanente en
el LTM R.
Cuando se selecciona un modo de funcionamiento personalizado, el controlador
LTM R emplea un archivo de lgica personalizada creado con el editor de lgica
personalizada y descargado en el controlador LTM R desde el software de
configuracin.
Transferir archivos
Utilice los siguientes comandos para descargar por separado (desde el software de
configuracin al controlador LTM R) el archivo de configuracin y el archivo de
lgica personalizada de la aplicacin:
Para descargar este archivo Utilice este comando
Archivo de configuracin con parmetros que se abre
y muestra en el software de configuracin
Comando PC to Device, situado en la barra de iconos o en
el submen Link File Transfer
Archivo de lgica con comandos lgicos que se abre y
muestra en el editor de lgica personalizada
ComandoDownload Program to Device, situado en la
barra de iconos o en el men Logic Functions
Funciones de control del motor
230 1639505 06/2009
4.3 Gestin de fallos y comandos Borrar
Descripcin general
En esta seccin se describe cmo gestiona el controlador LTM R el proceso de
control de los fallos, y se explica:
cmo seleccionar un modo de rearme tras fallo, y
el comportamiento del controlador en cada seleccin del modo de rearme tras
fallo
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Introduccin a la gestin de fallos 231
Rearme manual 235
Rearme automtico 238
Rearme a distancia 244
Cdigos de fallo y advertencia 246
Comandos Borrar del controlador LTM R 247
Funciones de control del motor
1639505 06/2009 231
Introduccin a la gestin de fallos
Descripcin general
Cuando el controlador LTM R detecta una condicin de fallo y activa la respuesta
adecuada, el fallo se guarda. Una vez guardado, permanece as, incluso aunque se
elimine la condicin de fallo subyacente, hasta que lo borra un comando de rearme.
El parmetro Fallo-modo de reinicio determina el modo en que el controlador LTM R
gestiona los fallos. En los siguientes temas se describen las selecciones del modo
de rearme tras fallo que se enumeran a continuacin:
Manual (vase pgina 235) (ajuste de fbrica)
Automtico (vase pgina 238)
A distancia (vase pgina 244)
El modo de rearme tras fallo no se puede cambiar mientras el fallo permanezca
activo. Todos los fallos se deben poner a cero antes de que se pueda cambiar el
modo de rearme tras fallo.
Mtodos de rearme tras fallo
Se puede emitir un comando de rearme por cualquiera de los siguientes medios:
desconexin y conexin de la alimentacin
botn de rearme del controlador LTM R
botn de rearme del teclado de HMI
comando de rearme de la herramienta de ingeniera de HMI
entrada lgica I.5
un comando de red
rearme automtico
ADVERTENCIA
RIESGO DE FUNCIONAMIENTO NO DESEADO
Cuando el controlador LTM R funciona con el control de 2 hilos con un comando
de marcha activo, un comando de rearme rearrancar inmediatamente el motor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Funciones de control del motor
232 1639505 06/2009
Comportamientos de rearme especficos del fallo
La respuesta del controlador LTM R a los fallos depende de la naturaleza del fallo
que se ha producido y de cmo est configurada la funcin de proteccin
relacionada. Por ejemplo:
Los fallos trmicos se pueden poner a cero despus de la cuenta atrs del tiempo
sobrepasado de reinicio tras fallo y una vez que la capacidad trmica utilizada
desciende por debajo del nivel de umbral de reinicio tras fallo.
Si el fallo incluye un valor de tiempo sobrepasado de reinicio, el tiempo
sobrepasado debe finalizar por completo antes de que se pueda ejecutar un
comando de rearme.
Slo la desconexin y conexin de la alimentacin puede poner a cero los fallos
internos del dispositivo.
La memoria del controlador LTM R no conserva los fallos de diagnstico y
cableado tras una prdida de alimentacin, pero s los dems fallos.
Los fallos internos, de diagnstico y de cableado no admiten la puesta a cero
automtica.
Todos los fallos de cableado y diagnstico se pueden poner a cero manualmente
mediante mtodos de rearme locales.
En los fallos de diagnstico, los comandos de rearme de red slo son vlidos en
el canal de control a distancia (red).
En los fallos de cableado, los comandos de rearme de red no son vlidos en
ningn canal de control.
Funciones de control del motor
1639505 06/2009 233
Caractersticas del fallo
Las funciones de supervisin de fallos del controlador LTM R guardan el estado de
los fallos de supervisin de la comunicacin y de proteccin del motor cuando se
produce una prdida de alimentacin, de forma que se debe acusar recibo de estos
fallos y se deben poner a cero como parte de una estrategia global de
mantenimiento del motor.
Categora de
proteccin
Fallo supervisado Controlador
LTM R
LTM R con LTM E Guardado a la
prdida de
alimentacin
Diagnstico Comprobacin del
comando de marcha
X X
Comprobacin del
comando de parada
X X
Verificacin del
funcionamiento del
motor
X X
Verificacin de parada X X
Errores de cableado /
configuracin
Conexin del PTC X X
Inversin de CT X X
Inversin de tensin de
fase
X
Inversin de corrientes
de fase
X X
Prdida de tensin de
fase
X
Configuracin de fase X X
Interna Desbordamiento de pila X X
Vigilancia (watchdog) X X
Suma de comprobacin
de ROM
X X
EEROM X X
CPU X X
Temperatura interna X X
Motor-sensor de
temperatura
PTC binario X X X
PT100 X X X
PTC analgico X X X
NTC analgico X X X
X Supervisado
No supervisado
Funciones de control del motor
234 1639505 06/2009
Sobrecarga trmica Definida X X X
Trmica inversa X X X
Corriente Arranque prolongado X X X
Agarrotamiento X X X
Desequilibrio de
corrientes de fase
X X X
Prdida de corriente de
fase
X X X
Sobrecorriente X X X
Infracorriente X X X
Corriente de tierra
interna
X X X
Corriente de tierra
externa
X X X
Tensin Sobretensin X X
Infratensin X X
Desequilibrio de
tensiones de fase
X X
Potencia Potencia insuficiente X X
Potencia excesiva X X
Factor de potencia
insuficiente
X X
Factor de potencia
excesivo
X X
Prdida de
comunicacin
PLC con LTM R X X X
HMI con LTM R X X X
Categora de
proteccin
Fallo supervisado Controlador
LTM R
LTM R con LTM E Guardado a la
prdida de
alimentacin
X Supervisado
No supervisado
Funciones de control del motor
1639505 06/2009 235
Rearme manual
Introduccin
Cuando el parmetro Fallo-modo de reinicio est establecido en Manual, el
controlador LTM R permite rearmes, normalmente realizados por una persona, a
travs de la desconexin y la conexin de la alimentacin de control o por medio de
rearmes locales, por ejemplo:
Bornero de conexin (entrada lgica I.5)
Botn de rearme del controlador LTM R
Comandos de rearme del HMI
El rearme manual proporciona al personal del sitio la oportunidad de inspeccionar
el equipo y el cableado antes de ejecutar el rearme.
NOTA: El rearme manual bloquea todos los comandos de rearme desde el puerto
de red del controlador LTM R, incluso cuando el canal de control est establecido
en Red.
Mtodos de rearme manual
El controlador LTM R proporciona los siguientes mtodos de rearme manual:
Categora de proteccin Fallo supervisado Canal de control
Bornero de
conexin
HMI
Red
(1)
Diagnstico Comprobacin del comando de marcha RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Comprobacin del comando de parada RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Verificacin del funcionamiento del motor RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Verificacin de parada RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Errores de cableado /
configuracin
Conexin del PTC RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de CT RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de tensin de fase RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de corrientes de fase RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Prdida de tensin de fase RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Configuracin de fase RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
RB Botn Test/Reset de la cara frontal del controlador LTM R o un HMI
CA Apagar y encender el controlador LTM R
I.5 Entrada lgica I.5 definida en el controlador LTM R
(1) No se permiten comandos de rearme de red a distancia aunque el controlador LTM R est configurado para el
canal de control de red.
Funciones de control del motor
236 1639505 06/2009
Interna Desbordamiento de pila CA CA CA
Vigilancia (watchdog) CA CA CA
Suma de comprobacin de ROM CA CA CA
EEROM CA CA CA
CPU CA CA CA
Temperatura interna CA CA CA
Motor-sensor de temperatura PTC binario RB, I.5 RB, I.5 RB, I.5
PT100 RB, I.5 RB, I.5 RB, I.5
PTC analgico RB, I.5 RB, I.5 RB, I.5
NTC analgico RB, I.5 RB, I.5 RB, I.5
Sobrecarga trmica Definida RB, I.5 RB, I.5 RB, I.5
Trmica inversa RB, I.5 RB, I.5 RB, I.5
Corriente Arranque prolongado RB, I.5 RB, I.5 RB, I.5
Agarrotamiento RB, I.5 RB, I.5 RB, I.5
Desequilibrio de corrientes de fase RB, I.5 RB, I.5 RB, I.5
Prdida de corriente de fase RB, I.5 RB, I.5 RB, I.5
Infracorriente RB, I.5 RB, I.5 RB, I.5
Sobrecorriente RB, I.5 RB, I.5 RB, I.5
Corriente de tierra externa RB, I.5 RB, I.5 RB, I.5
Corriente de tierra interna RB, I.5 RB, I.5 RB, I.5
Tensin Infratensin RB, I.5 RB, I.5 RB, I.5
Sobretensin RB, I.5 RB, I.5 RB, I.5
Desequilibrio de tensiones de fase RB, I.5 RB, I.5 RB, I.5
Potencia Potencia insuficiente RB, I.5 RB, I.5 RB, I.5
Potencia excesiva RB, I.5 RB, I.5 RB, I.5
Factor de potencia insuficiente RB, I.5 RB, I.5 RB, I.5
Factor de potencia excesivo RB, I.5 RB, I.5 RB, I.5
Categora de proteccin Fallo supervisado Canal de control
Bornero de
conexin
HMI
Red
(1)
RB Botn Test/Reset de la cara frontal del controlador LTM R o un HMI
CA Apagar y encender el controlador LTM R
I.5 Entrada lgica I.5 definida en el controlador LTM R
(1) No se permiten comandos de rearme de red a distancia aunque el controlador LTM R est configurado para el
canal de control de red.
Funciones de control del motor
1639505 06/2009 237
Prdida de comunicacin PLC con LTM R RB, I.5 RB, I.5 RB, I.5
LTM E con LTM R RB, I.5 RB, I.5 RB, I.5
Categora de proteccin Fallo supervisado Canal de control
Bornero de
conexin
HMI
Red
(1)
RB Botn Test/Reset de la cara frontal del controlador LTM R o un HMI
CA Apagar y encender el controlador LTM R
I.5 Entrada lgica I.5 definida en el controlador LTM R
(1) No se permiten comandos de rearme de red a distancia aunque el controlador LTM R est configurado para el
canal de control de red.
Funciones de control del motor
238 1639505 06/2009
Rearme automtico
Introduccin
El ajuste del parmetro Fallo-modo de reinicio en Automtico permite:
Configurar el controlador LTM R para que intente poner a cero los fallos de
comunicacin y proteccin del motor sin la intervencin de un operador o del
PLC a distancia, por ejemplo:
en el caso de un controlador LTM R no conectado en red instalado en una
ubicacin fsicamente a distancia, o de acceso localmente difcil
Configurar la gestin de fallos para cada grupo de fallos de proteccin de la
manera adecuada:
definir un retardo de tiempo sobrepasado diferente
permitir un nmero diferente de intentos de rearme
desactivar el rearme automtico tras fallo
La seleccin del parmetro Fallo-modo de reinicio determina los mtodos de rearme
disponibles.
Los fallos de proteccin se incluyen en 3 grupos de fallos con rearme automtico,
en funcin de las caractersticas de ese fallo, como se describe a continuacin.
Cada grupo de fallos presenta 2 parmetros configurables:
un tiempo sobrepasado: el parmetro Rearme automtico-tiempo sobrepasado
grupo (1, 2 o 3), y
un nmero mximo de rearmes tras fallo permitidos: el parmetro Rearme
automtico-ajuste intentos grupo (1, 2 o 3)
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
Un comando de rearme automtico puede rearrancar el motor si el controlador
LTM R se utiliza en un circuito de control de 2 hilos.
El funcionamiento del equipo debe guardar conformidad con los cdigos y
normativas de seguridad nacionales y locales.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Funciones de control del motor
1639505 06/2009 239
Comportamiento de rearme
Despus de que la alimentacin se apague y se vuelva a encender, el controlador
LTM R borra y pone a 0 los valores de los siguientes parmetros:
Rearme automtico-tiempo sobrepasado grupo (1, 2 o 3), y
Rearme automtico-ajuste intentos grupo (1, 2 o 3)
Si un rearme se ha producido con xito, el nmero de rearmes se borra y se pone
a 0. Un rearme tiene xito si, despus del mismo, el motor funciona durante 1
minuto sin el fallo del tipo del grupo designado.
Si se ha alcanzado el nmero mximo de rearmes automticos y el ltimo rearme
ha fallado, el modo de rearme se fijar en Manual. Cuando el motor rearranca, los
parmetros del modo automtico se fijan en 0.
Rearranque de emergencia
Utilice Borrar nivel de capacidad trmica-comando, en aplicaciones donde sea
necesario, para borrar el parmetro Nivel de capacidad trmica tras un fallo de
trmica inversa de sobrecarga trmica. Este comando permite un rearranque de
emergencia antes de que el motor se haya enfriado realmente.
Nmero de rearmes
Cada grupo de proteccin se puede ajustar en intentos de rearme manual, 1, 2, 3,
4 o 5.
Seleccione "0" para desactivar el rearme automtico de los grupos de fallos de
proteccin, y solicitar un rearme manual, incluso aunque el parmetro Fallo-modo
de reinicio est configurado para el rearme automtico.
Seleccione "5" para permitir un nmero ilimitado de intentos de rearme automtico.
Una vez vencido el retardo, el controlador LTM R intenta continuamente poner a
cero cada fallo de ese grupo de rearme.
ADVERTENCIA
PRDIDA DE PROTECCIN DEL MOTOR
Borrar el nivel de capacidad trmica anula la proteccin trmica, lo que puede
provocar que se sobrecaliente e incendie el equipo. El funcionamiento continuado
con la proteccin trmica anulada debe limitarse a aplicaciones en las que es
esencial el rearranque inmediato.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Funciones de control del motor
240 1639505 06/2009
Rearme automtico grupo 1 (AU-G1)
Los fallos del grupo 1 requieren un tiempo de refrigeracin predefinido una vez que
el parmetro supervisado vuelve a un umbral predefinido y desciende por debajo de
dicho umbral. Los fallos del grupo 1 comprenden fallos por sobrecarga trmica y de
sensor de temperatura del motor. El retardo de refrigeracin no se puede configurar.
Sin embargo, puede:
aumentar el retardo de refrigeracin mediante el ajuste del parmetro Rearme
automtico-tiempo sobrepasado grupo 1 en un valor superior a 0, o
desactivar el rearme automtico mediante el ajuste del parmetro Rearme
automtico-tiempo sobrepasado grupo 1 en 0
Rearme automtico grupo 1 presenta los siguientes parmetros configurables:
Rearme automtico grupo 2 (AU-G2)
Los fallos del grupo 2 no suelen incluir un retardo de refrigeracin predefinido antes
de que se pueda ejecutar un rearme, pero se pueden poner a cero en cuanto
desaparece la condicin de fallo. Muchos fallos del grupo 2 pueden dar lugar al
sobrecalentamiento del motor, segn la gravedad y la duracin de la condicin de
fallo que, a su vez, depende de la configuracin de las funciones de proteccin.
Si lo considera conveniente, puede aumentar el retardo de refrigeracin mediante
el ajuste del parmetro Rearme automtico-tiempo sobrepasado grupo 2 en un
valor superior a 0. Quizs desee tambin limitar el nmero de intentos de rearme
para impedir el desgaste o fallo prematuro del equipo.
Rearme automtico grupo 2 presenta los siguientes parmetros configurables:
Parmetros Intervalo de ajuste Ajuste de fbrica
Rearme automtico-ajuste intentos
grupo 1
0 = manual, 1, 2, 3, 4, 5 = nmero ilimitado de
intentos de rearme
5
Rearme automtico-tiempo
sobrepasado grupo 1
0...65.535 s 480 s
Parmetros Intervalo de ajuste Ajuste de fbrica
Rearme automtico-ajuste intentos
grupo 2
0 = manual, 1, 2, 3, 4, 5 = nmero ilimitado de
intentos de rearme
0
Rearme automtico-tiempo
sobrepasado grupo 2
0...65.535 s 1.200 s
Funciones de control del motor
1639505 06/2009 241
Rearme automtico grupo 3 (AU-G3)
Los fallos del grupo 3 con frecuencia se aplican a la supervisin del equipo y, por lo
general, no hace falta un perodo de refrigeracin del motor. Estos fallos se pueden
utilizar para detectar condiciones del equipo, por ejemplo, un fallo de infracorriente
que detecta la prdida de una correa, o un fallo de potencia excesiva que detecta
un aumento de la condicin de carga en un mezclador. Es posible que desee
configurar los fallos del grupo 3 de forma que se diferencien considerablemente de
los del grupo 1 o 2 mediante el ajuste del nmero de rearmes en 0. Por lo tanto, una
vez descubierto y corregido el fallo del equipo, hara falta un rearme manual.
Rearme automtico grupo 3 presenta los siguientes parmetros configurables:
Parmetros Intervalo de ajuste Ajuste de fbrica
Rearme automtico-ajuste intentos
grupo 3
0 = manual, 1, 2, 3, 4, 5 = nmero ilimitado de
intentos de rearme
0
Rearme automtico-tiempo
sobrepasado grupo 3
0...65.535 s 60 s
Funciones de control del motor
242 1639505 06/2009
Mtodos de rearme automtico
El controlador LTM R permite los siguientes mtodos de rearme automtico:
RB - Botn Test / Reset del LTM R o el HMI
CA - Apagar y encender el controlador LTM R
I.5 - Entrada lgica I.5 definida en el controlador LTM R
NC - Comando de red
Automtico con condiciones configuradas para el grupo de funciones de
proteccin (donde AU-GX = AU-G1, AU-G2 o AU-G3)
En la tabla siguiente se enumeran los mtodos de rearme automtico posibles para
cada fallo supervisado:
Categora de
proteccin
Fallo supervisado Canal de control
Bornero de
conexin
HMI Red
Diagnstico Comprobacin del
comando de marcha
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5, NC
Comprobacin del
comando de parada
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5, NC
Verificacin del
funcionamiento del motor
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5, NC
Verificacin de parada RB, CA, I.5 RB, CA, I.5 RB, CA, I.5, NC
Errores de cableado /
configuracin
Conexin del PTC RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de CT RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de tensin de
fase
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Inversin de corrientes
de fase
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Prdida de tensin de
fase
RB, CA, I.5 RB, CA, I.5 RB, CA, I.5
Configuracin de fase RB, CA, I.5 RB, CA, I.5 RB, CA, I.5, NC
Interna Desbordamiento de pila CA CA CA
Vigilancia (watchdog) CA CA CA
Suma de comprobacin
de ROM
CA CA CA
EEROM CA CA CA
CPU CA CA CA
Temperatura interna CA CA CA
Funciones de control del motor
1639505 06/2009 243
Motor-sensor de
temperatura
PTC binario AU-G1 AU-G1 AU-G1
PT100 AU-G1 AU-G1 AU-G1
PTC analgico AU-G1 AU-G1 AU-G1
NTC analgico AU-G1 AU-G1 AU-G1
Sobrecarga trmica Definida AU-G1 AU-G1 AU-G1
Trmica inversa AU-G1 AU-G1 AU-G1
Corriente Arranque prolongado RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Agarrotamiento RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Desequilibrio de
corrientes de fase
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Prdida de corriente de
fase
RB, I.5 RB, I.5 RB, I.5, NC
Infracorriente RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
Sobrecorriente RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
Corriente de tierra
externa
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Corriente de tierra
interna
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Tensin Infratensin RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Sobretensin RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Desequilibrio de
tensiones de fase
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Potencia Potencia insuficiente RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
Potencia excesiva RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
Factor de potencia
insuficiente
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Factor de potencia
excesivo
RB, I.5, AU-G2 RB, I.5, AU-G2 RB, I.5, NC, AU-G2
Prdida de
comunicacin
PLC con LTM R RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
LTM E con LTM R RB, I.5, AU-G3 RB, I.5, AU-G3 RB, I.5, NC, AU-G3
Categora de
proteccin
Fallo supervisado Canal de control
Bornero de
conexin
HMI Red
Funciones de control del motor
244 1639505 06/2009
Rearme a distancia
Introduccin
Si se establece el parmetro Fallo-modo de reinicio en A distancia, los fallos se
ponen a cero desde el PLC a travs del puerto de red del controlador LTM R. De
esta manera, las instalaciones del equipo se supervisan y controlan a nivel central.
La seleccin del parmetro Canal de control determina los mtodos de rearme
disponibles.
Tanto los mtodos de rearme manuales como a distancia ponen a cero un fallo.
Mtodos de rearme a distancia
El controlador LTM R proporciona los siguientes mtodos de rearme a distancia:
Categora de
proteccin
Fallo supervisado Canal de control
Bornero de conexin HMI Red
Diagnstico Comprobacin del comando
de marcha
RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Comprobacin del comando
de parada
RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Verificacin del
funcionamiento del motor
RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Verificacin de parada RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Errores de
cableado /
configuracin
Conexin del PTC RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Inversin de CT RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Inversin de tensin de fase RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Inversin de corrientes de
fase
RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Prdida de tensin de fase RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Configuracin de fase RB, CA, I.5, NC RB, CA, I.5, NC RB, CA, I.5, NC
Interna Desbordamiento de pila CA CA CA
Vigilancia (watchdog) CA CA CA
Suma de comprobacin de
ROM
CA CA CA
EEROM CA CA CA
CPU CA CA CA
Temperatura interna CA CA CA
RB Botn Test/Reset de la cara frontal del controlador LTM R o el HMI
CA Apagar y encender el controlador LTM R
I.5 Entrada lgica I.5 definida en el controlador LTM R
NC Comando de red
Funciones de control del motor
1639505 06/2009 245
Motor-sensor de
temperatura
PTC binario RB, I.5, NC RB, I.5, NC RB, I.5, NC
PT100 RB, I.5, NC RB, I.5, NC RB, I.5, NC
PTC analgico RB, I.5, NC RB, I.5, NC RB, I.5, NC
NTC analgico RB, I.5, NC RB, I.5, NC RB, I.5, NC
Sobrecarga
trmica
Definida RB, I.5, NC RB, I.5, NC RB, I.5, NC
Trmica inversa RB, I.5, NC RB, I.5, NC RB, I.5, NC
Corriente Arranque prolongado RB, I.5, NC RB, I.5, NC RB, I.5, NC
Agarrotamiento RB, I.5, NC RB, I.5, NC RB, I.5, NC
Desequilibrio de corrientes
de fase
RB, I.5, NC RB, I.5, NC RB, I.5, NC
Prdida de corriente de fase RB, I.5, NC RB, I.5, NC RB, I.5, NC
Infracorriente RB, I.5, NC RB, I.5, NC RB, I.5, NC
Sobrecorriente RB, I.5, NC RB, I.5, NC RB, I.5, NC
Corriente de tierra externa RB, I.5, NC RB, I.5, NC RB, I.5, NC
Corriente de tierra interna RB, I.5, NC RB, I.5, NC RB, I.5, NC
Tensin Infratensin RB, I.5, NC RB, I.5, NC RB, I.5, NC
Sobretensin RB, I.5, NC RB, I.5, NC RB, I.5, NC
Desequilibrio de tensiones
de fase
RB, I.5, NC RB, I.5, NC RB, I.5, NC
Potencia Potencia insuficiente RB, I.5, NC RB, I.5, NC RB, I.5, NC
Potencia excesiva RB, I.5, NC RB, I.5, NC RB, I.5, NC
Factor de potencia
insuficiente
RB, I.5, NC RB, I.5, NC RB, I.5, NC
Factor de potencia excesivo RB, I.5, NC RB, I.5, NC RB, I.5, NC
Prdida de
comunicacin
PLC con LTM R RB, I.5, NC RB, I.5, NC RB, I.5, NC
LTM E con LTM R RB, I.5, NC RB, I.5, NC RB, I.5, NC
Categora de
proteccin
Fallo supervisado Canal de control
Bornero de conexin HMI Red
RB Botn Test/Reset de la cara frontal del controlador LTM R o el HMI
CA Apagar y encender el controlador LTM R
I.5 Entrada lgica I.5 definida en el controlador LTM R
NC Comando de red
Funciones de control del motor
246 1639505 06/2009
Cdigos de fallo y advertencia
Cdigos de fallo
El parmetro Fallo-cdigo describe el tipo de fallo ms reciente. Cada tipo de fallo
se representa con un nmero.
Para consultar la lista detallada de los cdigos de fallo, consulte dt_faultcode
(vase pgina 466).
Cdigos de advertencia
El parmetro Advertencia-cdigo describe el tipo de advertencia ms reciente.
Cada tipo de advertencia se representa con un nmero.
Para consultar la lista detallada de los cdigos de advertencia, consulte
dt_warningcode (vase pgina 469).
Funciones de control del motor
1639505 06/2009 247
Comandos Borrar del controlador LTM R
Descripcin general
Los comandos Borrar permiten al usuario borrar categoras especficas de los
parmetros del controlador LTM R:
Borrar todos los parmetros
Borrar histricos
Borrar nivel de capacidad trmica
Borrar configuracin del controlador
Borrar configuracin de puerto de red
Los comandos Borrar se pueden ejecutar desde:
Un PC con el software PowerSuite
Un dispositivo HMI
Un PLC a travs de un puerto de red (registro 705)
Borrar todo-comando
Si desea cambiar la configuracin del controlador LTM R, es posible que desee
borrar todos los parmetros existentes y establecer unos nuevos para el
controlador.
Con Borrar todo-comando el controlador entra forzosamente en modo de
configuracin. Se debe apagar y encender el dispositivo para rearrancar
correctamente en este modo. De esta forma, el controlador puede obtener los
nuevos valores para los parmetros borrados.
Al borrar todos los parmetros, tambin se pierden las caractersticas estticas.
Despus de ejecutar Borrar todo-comando, los nicos parmetros que no se borran
son:
Motor-nmero de arranques L01
Motor-nmero de arranques L02
Controlador-temperatura interna mx.
Borrar histricos-comando
Los parmetros de histricos se borran sin que el controlador LTM R tenga que
entrar forzosamente en modo de configuracin. Las caractersticas estticas se
conservan.
Despus de ejecutar Borrar histricos-comando, los nicos parmetros que no se
borran son:
Motor-nmero de arranques L01
Motor-nmero de arranques L02
Controlador-temperatura interna mx.
Funciones de control del motor
248 1639505 06/2009
Borrar nivel de capacidad trmica-comando
Borrar nivel de capacidad trmica-comando borra los siguientes parmetros:
Nivel de capacidad trmica
Ciclo rpido-tiempo sobrepasado de bloqueo
Los parmetros de la memoria trmica se borran sin que el controlador tenga que
entrar forzosamente en modo de configuracin. Las caractersticas estticas se
conservan.
NOTA: Este bit se puede escribir en cualquier momento, incluso cuando el motor
est en marcha.
Si desea obtener ms informacin sobre Borrar nivel de capacidad trmica-
comando, consulte Rearme para rearranque de emergencia, pgina 93.
Borrar configuracin del controlador-comando
Borrar configuracin del controlador-comando restaura los valores de proteccin
del controlador LTM R a sus ajustes de fbrica (tiempo sobrepasado y umbrales).
Los ajustes siguientes no se borran con este comando:
Caractersticas del controlador
Conexiones (CT, sensor de temperatura y parmetros de E/S)
Modo de funcionamiento
Los parmetros de configuracin del controlador se borran sin que el controlador
tenga que entrar forzosamente en modo de configuracin. Las caractersticas
estticas se conservan.
Borrar configuracin de puerto de red-comando
Borrar configuracin de puerto de red-comando restaura los valores del puerto de
red del controlador LTM R a sus ajustes de fbrica (direccin, etctera).
La configuracin de puerto de red se borra sin que el controlador tenga que entrar
forzosamente en modo de configuracin. Las caractersticas estticas se
conservan. Slo la comunicacin de red deja de ser efectiva.
Despus de borrar los parmetros de direccionamiento IP, se debe apagar y
encender el controlador LTM R para que obtenga nuevos parmetros de direccio-
namiento IP (vase pgina 403).
1639505 06/2009 249
5
Instalacin
1639505 06/2009
Instalacin
Descripcin general
En este captulo se describe la instalacin fsica y el montaje del controlador LTM R
y el mdulo de expansin LTM E. Tambin se explica cmo conectar y cablear el
bloque de terminales del controlador, lo que incluye el cableado del puerto de
comunicacin.
PELIGRO
PELIGRO DE DESCARGA ELCTRICA, EXPLOSIN O DESTELLO DE ARCO
VOLTAICO
Desconecte la alimentacin de este equipo antes de trabajar en l.
Utilice equipo de proteccin personal adecuado (PPE) y siga las recomenda-
ciones para el trabajo seguro con dispositivos elctricos.
Si no se siguen estas instrucciones provocar lesiones graves o incluso la
muerte.
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
La aplicacin de este producto requiere experiencia en el diseo y la
programacin de sistemas de control. Slo las personas que tengan experiencia
estn autorizadas a programar y aplicar este producto.
Siga todos los cdigos y normativas de seguridad locales y nacionales.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Instalacin
250 1639505 06/2009
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
5.1 Instalacin 251
5.2
Cableado de la red de comunicacin Modbus
/TCP
288
Instalacin
1639505 06/2009 251
5.1 Instalacin
Descripcin general
En esta seccin se describen los procedimientos de instalacin y los principios de
cableado del controlador LTM R y el mdulo de expansin LTM E.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Dimensiones 252
Montaje 255
Montaje 260
Conexin a un dispositivo HMI 263
Cableado: Principios generales 268
Cableado: Transformadores de corriente (CT) 274
Cableado: Transformadores de corriente de fallo a tierra 280
Cableado: Sensores de temperatura 282
Contactores recomendados 283
Instalacin
252 1639505 06/2009
Dimensiones
Descripcin general
En esta seccin se describen las dimensiones del controlador LTM R y del mdulo
de expansin LTM E, as como las dimensiones del rea de separacin alrededor
de estos dispositivos. Las dimensiones se proporcionan en milmetros y pulgadas y
se aplican a todos los modelos LTM R y LTM E.
Dimensiones del controlador LTM R
NOTA: La altura del controlador puede aumentar cuando se utilizan terminales de
cableado alternativos.
Instalacin
1639505 06/2009 253
Dimensiones del mdulo de expansin LTM E
Instalacin
254 1639505 06/2009
Dimensiones del rea de separacin
La temperatura ambiente nominal mxima del controlador depende de las
dimensiones del rea de separacin. Se muestran en la siguiente tabla.
Instalacin
1639505 06/2009 255
Montaje
Descripcin general
En esta seccin se describe el montaje del controlador LTM R y el mdulo de
expansin LTM E en un riel DIN, una placa de fijacin slida o una placa de fijacin
previamente ranurada (conocida como placa TE), por ejemplo, una placa
Telequick
. Tambin se describen los accesorios necesarios para el montaje, junto
con el modo de extraer cada componente.
Montaje en rieles DIN
El montaje del controlador y el mdulo de expansin se puede realizar en un riel DIN
de 35 mm (1.38 in.) con un grosor de 1,35 mm (0.05 in.) y 0,75 mm (0.02 in.). Tras
el montaje, es posible que los pies de montaje de controlador no puedan extenderse
por encima de las dimensiones (vase pgina 252)del mismo. Para montar el
controlador:
Paso Accin
1 En la parte posterior del controlador, hay dos grapas para rieles DIN. Fije la grapa superior al riel DIN.
2 Empuje el controlador hacia el riel DIN hasta que la grapa inferior enganche. El controlador encaja en su
lugar.
1
2
Click!
Instalacin
256 1639505 06/2009
Extraccin de rieles DIN
Para separar el controlador del riel DIN:
Paso Accin
1 Mediante un destornillador, tire hacia abajo del mecanismo de bloqueo blanco para liberar el controlador.
2 Levante el controlador y seprelo del riel DIN.
1
2
Instalacin
1639505 06/2009 257
Montaje sobre una placa de fijacin slida
El montaje del controlador y el mdulo de expansin se puede realizar en una placa
de fijacin metlica mediante tornillos roscadores de acero ST2.9: 4 para el
controlador y 2 para el mdulo de expansin. El grosor de la placa de fijacin no
debe superar los 7 mm (0.275 in.). Tras el montaje, los pies de montaje del
controlador pueden extenderse 8 mm (0.3 in.) por encima de las dimensiones
(vase pgina 252) del mismo en ambos sentidos. Para montar el controlador y el
mdulo de expansin en una placa de fijacin:
Paso Accin
1 Localice los cuatro orificios de montaje situados en cada esquina del controlador y los dos orificios de
montaje del mdulo de expansin.
2 Site el controlador y el mdulo de expansin sobre la placa de fijacin, teniendo cuidado de dejar
espacio suficiente para el rea de separacin. Consulte Dimensiones, pgina 252.
3 Inserte cada uno de los 6 tornillos roscadores.
4 Utilice un destornillador para apretar los tornillos y fijar bien en su lugar el controlador y el mdulo de
expansin. Apriete hasta 1 Nm (8.8 lb-in).
Instalacin
258 1639505 06/2009
Montaje en una placa TE
El montaje del controlador y el mdulo de expansin se puede realizar en una placa
TE, como la Telequick
, mediante 6 grapas de fijacin (AF1 EA4). Tras el montaje,
los pies de montaje del controlador pueden extenderse 8 mm (0.3 in.) por encima
de las dimensiones (vase pgina 252) del mismo en ambos sentidos. Para montar
el controlador en una placa Telequick
:
Paso Accin
1
Enganche las 6 grapas de fijacin a la placa Telequick
, como se muestra en el siguiente diagrama. El
borde redondeado debe quedar hacia arriba con respecto a las grapas superiores y hacia abajo con
respecto a las inferiores.
2 Site el controlador y el mdulo de expansin sobre las grapas de modo que los orificios de las grapas
y los del controlador y el mdulo de expansin queden alineados. Inserte los tornillos en los orificios y
apritelos ligeramente.
3 Cuando el controlador y el mdulo de expansin estn colocados adecuadamente, apriete primero los
tornillos inferiores y luego los superiores con un destornillador. Apriete hasta 1 Nm (8.8 lb-in).
Instalacin
1639505 06/2009 259
Posicin de funcionamiento
El montaje del controlador y el mdulo de expansin se puede realizar a un ngulo
de hasta 90 grados en perpendicular al plano de montaje vertical normal.
Instalacin
260 1639505 06/2009
Montaje
Presentacin
Una vez que ha montado el controlador LTM R, y el mdulo de expansin LTM E,
si se necesita, debe montar las diferentes partes del sistema. En esta seccin se
describe cmo conectar el controlador al mdulo de expansin, as como el modo
de sustituir los borneros de conexin estndar por otros alternativos.
Sustitucin de los borneros de conexin
Los borneros de conexin estndar del controlador y el mdulo de expansin se
pueden sustituir, en caso necesario, por otros alternativos. Con los borneros de
conexin alternativos, los cables se conectan en perpendicular a la parte frontal del
controlador o el mdulo de expansin.
Para sustituir los borneros estndar por unos alternativos:
Paso Accin
1 Utilizando un destornillador, haga palanca para extraer los 6 borneros de conexin estndar de la
unidad.
Instalacin
1639505 06/2009 261
NOTA: Hay dos borneros de conexin de 4 pines. Estos borneros no son intercam-
biables. Por lo tanto, es importante que lea las marcas de los borneros de conexin
y que siga, para su colocacin, el diagrama que se muestra a continuacin.
2 Encaje los borneros alternativos en su lugar, asegurndose de que los coloca correctamente.
Paso Accin
Instalacin
262 1639505 06/2009
Conexin del controlador LTM R y el mdulo de expansin LTM E
El controlador LTM R se conecta al mdulo de expansin LTM E mediante un cable
de conexin de red RJ45, como se muestra en el siguiente diagrama.
Existen tres longitudes de cable para conectar el controlador y el mdulo de
expansin, segn sus posiciones relativas. Estos cables, cuyos extremos estn
terminados con un conector RJ45, se describen en la siguiente tabla.
Referencia de cable Longitud
1 LTMCC004 40 mm (1.57 in.)
2 LU9R03 0,3 m (11.81 in.)
3 LU9R10 1 m (39.37 in.)
Instalacin
1639505 06/2009 263
Conexin a un dispositivo HMI
Descripcin general
En esta seccin se describe cmo conectar el controlador LTM R a un dispositivo
HMI, como un XBT de Magelis
o un TeSys
T LTM CU, , o a un PC con el software
PowerSuite. El dispositivo HMI debe estar conectado al puerto RJ45 del
controlador LTM R, o al puerto de interfaz del HMI (RJ45) en el mdulo de
expansin LTM E.
El dispositivo HMI XBT de Magelis
debe recibir alimentacin por separado. Puede
conectarlo a un controlador en el modo de configuracin de 1 a varios.
NOTA: Si se pulsa una tecla mientras el dispositivo HMI XBT de Magelis
pierde la
comunicacin, no se efectuar la actualizacin del teclado. Cuando se recupera la
comunicacin con el LTM R, aparece el siguiente mensaje: "203 No se puede
conectar al controlador". Pulse cualquier tecla o apague y vuelva a encender el
dispositivo.
Conexin a un dispositivo HMI XBT de Magelis
en modo de 1 a varios
En el siguiente diagrama se muestra una conexin de 1 a varios desde el HMI
XBTN410 de Magelis
a hasta ocho controladores (con o sin el mdulo de
expansin LTM E):
1 Dispositivo HMI XBTN410 de Magelis
2 Cable de conexin XBTZ938 de Magelis
3 Cajas de conexiones T VW3 A8 306 TF
4 Cable de comunicacin VW3 A83 06R
5 Terminadores de lnea VW3 A8 306 R
6 Controlador LTM R
7 Mdulo de expansin LTM E
NOTA: Para ver una lista completa de los accesorios de conexin, consulte
Accesorios de conexin, pgina 267.
Instalacin
264 1639505 06/2009
Conexin al dispositivo HMI TeSys
T LTM CU
En los diagramas siguientes se muestra el dispositivo HMI TeSys
T LTM CU
conectado al controlador LTM R, con o sin el mdulo de expansin LTM E:
1 Unidad de operador de control LTM CU
2 Cable RJ45 (VW3 A1 104R30, en este ejemplo)
3 Controlador LTM R
4 Mdulo de expansin LTM E
Instalacin
1639505 06/2009 265
Conexin a un dispositivo HMI genrico
Tambin puede conectar el controlador LTM R y el mdulo de expansin a un
dispositivo HMI de su eleccin, mediante un cable personalizado.
El cable personalizado requiere los siguientes patillajes del puerto RJ45 para la
conexin al puerto HMI del controlador LTM R o al mdulo de expansin LTM E:
El plano del cableado de RJ45 es:
Conexin a un PC con el software PowerSuite instalado en modo de 1 a 1
Puede conectar un PC, con el software PowerSuite, al controlador LTM R y obtener
acceso a los parmetros del controlador utilizando los siguientes elementos del
controlador:
el puerto HMI, o
uno de los dos puertos de red
NOTA: Aunque el software PowerSuite puede acceder a los parmetros del
controlador utilizando cualquier tipo de puerto:
Cada tipo de puerto puede necesitar valores de ID de unidad distintos para las
solicitudes Modbus/TCP (vase pgina 453).
Slo los dos puertos de red pueden leer el registro de estado mirroring de
prioridad alta (vase pgina 421).
N. de pin Seal Descripcin
1 Reservada No conectar
2 Reservada No conectar
3 - No conectado
4 D1 o D(B) Comunicacin entre HMI y el controlador LTM R
5 D0 o D(A) Comunicacin entre HMI y el controlador LTM R
6 Reservada No conectar
7 VP Alimentacin elctrica positiva de 7 V CC (100 mA) proporcionada por el
controlador LTM R
8 Comn Comn de seal y alimentacin
Instalacin
266 1639505 06/2009
En los siguientes diagramas se muestra una conexin de 1 a 1 desde un PC con el
software PowerSuite al puerto HMI del controlador LTM R, con y sin el mdulo de
expansin LTM E:
1 PC con el software PowerSuite
2 Juego de cables PowerSuite VW3 A8 106
3 Controlador LTM R
4 Mdulo de expansin LTM E
En los siguientes diagramas se muestra una conexin de 1 a 1 desde un PC con el
software PowerSuite a uno de los puertos de red del controlador LTM R, con y sin
el mdulo de expansin LTM E:
1 PC con el software PowerSuite
2 Cable Ethernet de par trenzado apantallado o no apantallado de categora 5
3 Controlador LTM R
4 Mdulo de expansin LTM E
Instalacin
1639505 06/2009 267
Conexin a un PC con el software PowerSuite instalado en modo de 1 a varios
En el siguiente diagrama se muestra una conexin de 1 a varios desde un PC con
el software PowerSuite a hasta ocho controladores (con o sin el mdulo de
expansin):
1 PC con el software PowerSuite
2 Juego de cables PowerSuite VW3 A8 106
3 Cajas de conexiones T VW3 A8 306 TF
4 Cable de comunicacin VW3 A83 06R
5 Terminadores de lnea VW3 A8 306 R
6 Controlador LTM R
7 Mdulo de expansin LTM E
Accesorios de conexin
En la siguiente tabla se muestran los accesorios de conexin para el XBT de
Magelis
y otros dispositivos HMI:
Designacin Descripcin Referencia
Cajas de conexiones T Con cable integrado de 0,3 m (1 ft) VW3 A8 306 TF03
Con cable integrado de 1 m (3.2 ft) VW3 A8 306 TF10
Terminadores de lnea para el conector RJ45 R = 150 VW3 A8 306 R
Cable de conexin de Magelis
(slo XBTN410 de Magelis
)
Longitud = 2,5 m (8.2 ft)
Conector SUB-D de 25 patillas para la
conexin al XBT de Magelis
XBTZ938
Juego de cables PowerSuite Longitud = 1 m (3.2 ft)
Convertidor RS-232 a RS-485
VW3A8106
Cables de comunicacin Longitud = 0,3 m (1 ft) VW3 A8 306 R03
Longitud = 1 m (3.2 ft) VW3 A8 306 R10
Instalacin
268 1639505 06/2009
Cableado: Principios generales
Presentacin
El cableado del controlador LTM R es un proceso formado por seis etapas:
Cableado de los transformadores de corriente. Consulte Cableado: Transfor-
madores de corriente (CT), pgina 274.
Cableado de los transformadores de corriente de fallo de tierra. Consulte
Cableado: Transformadores de corriente de fallo a tierra, pgina 280.
Cableado de los sensores de temperatura. Consulte Cableado: Sensores de
temperatura, pgina 282.
Cableado de la alimentacin elctrica y la E/S. Consulte Cableado de entradas,
a continuacin, y el captulo Especificaciones tcnicas del controlador LTM R,
pgina 578.
Cableado de los transformadores de tensin y la E/S del mdulo de expansin
LTM E. Consulte Cableado de entradas, a continuacin, y el captulo Especifica-
ciones tcnicas del controlador LTM R, pgina 578.
Cableado del puerto de comunicacin. Consulte Caractersticas del terminal de
cableado del puerto de red Modbus/TCP, pgina 289.
Instalacin
1639505 06/2009 269
Cableado de entradas
El controlador presenta 6 entradas digitales disponibles a travs de los terminales
de cableado del inductor I.1- I.6. La tensin de entrada es la misma que la tensin
de alimentacin del controlador: las entradas lgicas del controlador se alimentan
internamente de la tensin de control del controlador. Las entradas del controlador
se encuentran aisladas de las entradas del mdulo de expansin.
Los 3 terminales del controlador para el cableado del comn no estn conectados
al comn del LTM R, sino que estn conectados internamente al terminal de tensin
de control A1 (consulte Ejemplo de diagrama de cableado, pgina 272).
Las 4 entradas digitales del mdulo de expansin (I.7 - I.10) no se alimentan de la
tensin de control del controlador. Lo hacen externamente, y la tensin de entrada
depende del mdulo de expansin (24 V CC, 110 V CA o 220 V CA).
NOTA: Como el mdulo de expansin se alimenta del controlador, no tiene una
tensin de control diferente.
Para obtener ms informacin acerca de las caractersticas de las entradas,
consulte Especificaciones tcnicas del controlador LTM R, pgina 578.
Instalacin
270 1639505 06/2009
Borneros enchufables y asignaciones de pines
El controlador LTM R presenta los siguientes borneros enchufables y asignaciones
de pines:
Bloque de terminales Pin Descripcin
Terminales de tensin de control,
entrada lgica y origen comn
A1 Entrada de tensin de alimentacin (+ / ~)
A2 El negativo de una fuente de alimentacin en modelos de CC, o el
secundario con conexin a tierra de un transformador de alimentacin
de control en modelos de CA ( / ~)
I.1 Entrada lgica 1
I.2 Entrada lgica 2
I.3 Entrada lgica 3
I.4 Entrada lgica 4
I.5 Entrada lgica 5
I.6 Entrada lgica 6
C Comn de entrada
Terminales de salida de rel
DPST
9798 Contacto NA
9596 Contacto NC
Nota: Los contactos 9798 y los contactos 9596 estn en el mismo rel, as que
el estado abierto/cerrado de un par de contactos siempre es el opuesto al estado
del otro par.
Terminales de salida de rel 1314 Contacto NA: salida lgica 1
2324 Contacto NA: salida lgica 2
3334 Contacto NA: salida lgica 3
Entrada de fallo a tierra y entrada
de sensor de temperatura
Z1Z2 Conexin para transformador de corriente de fallo a tierra externo
T1T2 Conexin para sensores de temperatura del motor
Instalacin
1639505 06/2009 271
El mdulo de expansin LTM E presenta los siguientes borneros enchufables y
asignaciones de pines:
Caractersticas del cableado de los terminales
Los terminales del controlador LTM R y del mdulo de expansin LTM E tienen las
mismas caractersticas. Los terminales tienen una especificacin de aislamiento de
250 V CA.
En la siguiente tabla se describen las caractersticas de los cables que se pueden
utilizar con los terminales:
En la tabla siguiente se describen los detalles de los conectores:
Bloque de terminales Pin Descripcin
Entradas de tensin LV1 Tensin de entrada fase 1
LV2 Tensin de entrada fase 2
LV3 Tensin de entrada fase 3
Entradas lgicas y terminales de comn I.7 Entrada lgica 7
C7 Comn para I.7
I.8 Entrada lgica I.8
C8 Comn para I.8
I.9 Entrada lgica I.9
C9 Comn para I.9
I.10 Entrada lgica I.10
C10 Comn para I.10
Tipo de cable N. de conductores Seccin del conductor
mm
2
AWG
Cable flexible (trenzado) Un conductor 0,2...2,5 24...14
2 conductores 0,2...1,5 24...16
Cable rgido Un conductor 0,2...2,5 24...14
2 conductores 0,2...1,0 24...18
Cable flexible (trenzado) con los extremos aislados Un conductor 0,25...2,5 24...14
2 conductores 0,5...1,5 20...16
Cable flexible (trenzado) sin los extremos aislados Un conductor 0,25...2,5 24...14
2 conductores 0,2...1,0 24...18
Conectores 3 y 6 pines
Altura 5,08 mm 0.2 in.
Par de apriete 0,5 a 0,6 Nm 5 lb-in
Destornillador plano 3 mm 0.10 in.
Instalacin
272 1639505 06/2009
Ejemplo de diagrama de cableado
En el siguiente diagrama se muestran las conexiones entre la alimentacin elctrica
y las E/S del bloque de terminales cuando el controlador est en modo
independiente de 3 hilos (impulso):
Instalacin
1639505 06/2009 273
En el siguiente diagrama se muestran las conexiones cuando el controlador est en
modo independiente monofsico:
Para ver ms diagramas de aplicaciones, consulte los Diagramas de cableado,
pgina 607.
Instalacin
274 1639505 06/2009
Cableado: Transformadores de corriente (CT)
Descripcin general
El controlador LTM R tiene 3 ventanas de CT por las cuales puede encaminar los
cables del motor hasta las conexiones de carga del contactor.
Las ventanas de CT permiten cablear el controlador de cuatro formas diferentes,
segn la tensin y el modelo de controlador utilizado:
Cableado de CT interno por las ventanas
Cableado de CT interno mediante mltiples pasos
Cableado de CT interno con el juego de conexiones (ref. Clase 9999 MLPL)
Cableado de CT de carga externa
En esta seccin se describe cada una de estas opciones.
Cableado de CT interno por las ventanas
En los siguientes diagramas se describe el cableado tpico para motores
monofsicos y trifsicos, utilizando las ventanas de CT:
Instalacin
1639505 06/2009 275
Cableado de CT interno mediante mltiples pasos
El controlador admite fsicamente hasta 5 pasos de cable de 2,5 mm
2
(14 AWG) a
travs de las ventanas de CT. Existen tres ventanas de bucle situadas bajo las
ventanas de CT que admiten fsicamente hasta 4 bucles de cable como mximo.
Puede configurar el parmetro CT de carga-mltiples pasos para justificar el
nmero de veces que los cables del motor pasan por la ventana de CT y as poder
mostrar las lecturas de corriente correctas. Para obtener ms informacin, consulte
los parmetros de Transformador de corriente de carga (vase pgina 590)
En el siguiente diagrama se describe el cableado tpico mediante 2 pasos (1 bucle
de cable):
Multiplique la corriente por el nmero de veces que los cables del motor pasan por
las ventanas de CT para determinar la cantidad de corriente que atraviesa los
sensores de corriente interna.
Instalacin
276 1639505 06/2009
Es posible que desee aadir mltiples pasos para:
Aumentar la corriente detectada por los sensores de corriente interna hasta un
nivel que el controlador pueda detectar de manera adecuada.
Proporcionar una lectura ms precisa de los sensores de corriente interna.
Recomendamos seleccionar un controlador con un intervalo de valores de FLC que
incluya el FLC del motor. No obstante, si el FLC del motor es inferior al intervalo de
FLC del controlador, los mltiples pasos pueden aumentar el nivel de corriente
detectado por los sensores de corriente interna hasta uno que el controlador pueda
detectar.
Por ejemplo, si utiliza un controlador con un intervalo de FLC de entre 5 y 100 A, y
el FLC del motor es de 3 A, el controlador no podr detectar de forma adecuada la
corriente. En este caso, si pasa el cable de alimentacin dos veces por los sensores
de corriente interna del controlador, estos detectarn 6 A (2 pasos x 3 A), un nivel
de corriente que est dentro del intervalo de FLC del controlador.
Para obtener ms informacin acerca de los tipos de controlador, consulte
Presentacin del sistema de gestin de motores TeSys T, pgina 16.
Instalacin
1639505 06/2009 277
Cableado de CT interno con un juego de conexiones
El controlador acepta el juego de conexiones Clase 9999 Tipo MLPL.
En el siguiente diagrama se describe el cableado tpico con el juego de conexiones:
NOTA: El juego de conexiones es IP0.
Para obtener ms informacin acerca del juego de conexiones, consulte el boletn
de instrucciones 30072-013-101
Suministrado con el juego.
Disponible en www.us.SquareD.com (en la biblioteca tcnica).
Instalacin
278 1639505 06/2009
Cableado de CT de carga externa
El controlador puede aceptar seales secundarias de 5 A y 1 A de transformadores
de corriente externa. El modelo de controlador recomendado para estas corrientes
es el de 0,4-8 A. En caso necesario, puede utilizar mltiples pasos a travs de las
ventanas de CT del controlador.
Los CT externa tienen especificada una relacin de transformacin. La relacin de
CT externa es la relacin de la corriente de entrada del motor con la corriente de
salida del CT.
Para que el controlador pueda ajustar el intervalo de FLC y mostrar la corriente de
lnea real, establezca los parmetros siguientes:
CT de carga-primario (el primer nmero de la relacin de CT)
CT de carga-secundario (el segundo nmero de la relacin de CT)
CT de carga-mltiples pasos (el nmero de veces que los cables de salida de CT
pasan por las ventanas de los CT internos del controlador)
Para obtener ms informacin, consulte los parmetros de transformador de
corriente de carga (vase pgina 590)
Instalacin
1639505 06/2009 279
En el siguiente diagrama se describe el cableado con CT externa:
NOTA: El controlador mide la corriente a la frecuencia fundamental de 47-63 Hz.
Por lo tanto, si el controlador se utiliza con un variador de velocidad, el controlador
se debe instalar entre el dispositivo y la lnea. Los CT no se pueden utilizar entre las
salidas del variador y el motor dado que el variador puede emitir frecuencias
fundamentales fuera del intervalo comprendido entre 47 y 63 Hz.
Para ver una descripcin de las caractersticas de los CT externa, consulte
Presentacin del sistema de gestin de motores TeSys T, pgina 16.
Instalacin
280 1639505 06/2009
Cableado: Transformadores de corriente de fallo a tierra
Cableado de transformadores de corriente de fallo a tierra
El controlador LTM R dispone de 2 terminales que se pueden conectar a un
transformador de corriente de fallo a tierra externo (GFCT): Z1 y Z2
(vase pgina 272)
En el siguiente diagrama se muestra el cableado tpico con un GFCT:
NOTA: El transformador de corriente de fallo a tierra se debe cablear antes que la
alimentacin elctrica.
Instalacin
1639505 06/2009 281
Los GFCT tienen especificada una relacin de transformacin. La relacin del
GFCT es la relacin de la corriente de fallo a tierra detectada con la corriente de
salida.
Configure los parmetros CT de tierra-primario (el primer nmero de la relacin de
GFCT) y CT de tierra-secundario (el segundo nmero de la relacin de GFCT) para
que el controlador pueda medir correctamente la corriente de fallo a tierra real que
fluye en el circuito. Para obtener ms informacin, consulte Herramientas de
configuracin, pgina 299.
Para ver una descripcin de las caractersticas de los GFCT, consulte Presentacin
del sistema de gestin de motores TeSys T, pgina 16.
Instalacin
282 1639505 06/2009
Cableado: Sensores de temperatura
Sensores de temperatura
El controlador LTM R tiene 2 terminales dedicados a la proteccin de los sensores
de temperatura: T1 y T2. Estos terminales devuelven el valor de temperatura
medido por los detectores de temperatura de resistencia (RTD).
Es posible utilizar uno de los siguientes tipos de sensor de temperatura del motor:
PTC binario
PT100
PTC analgo
NTC analgo
En la siguiente tabla se muestran las longitudes mximas de cable para los
elementos sensor de temperatura:
Utilice cables de par trenzado para conectar el controlador al sensor de
temperatura. Para que el controlador mida con precisin la resistencia del elemento
sensor de temperatura, deber medir la resistencia del cable de par trenzado y
aadirla a la resistencia de proteccin deseada. Esto compensa la resistencia del
cable.
Consulte el captulo sobre Funciones de medicin y supervisin, pgina 33 y el
captulo sobre Funciones de proteccin del motor, pgina 83 para obtener ms
informacin acerca de los sensores de temperatura.
Para ver un ejemplo de un diagrama de cableado con un sensor de temperatura,
consulte Ejemplo de diagrama de cableado, pgina 272.
mm
2
(AWG)
0,5 (20) 0,75 (18) 1,5 (16) 2,5 (14)
m (ft) 220 (656) 300 (985) 400 (1312) 600 (1970)
Instalacin
1639505 06/2009 283
Contactores recomendados
Contactores recomendados
Es posible utilizar los siguientes tipos de contactores:
Contactores de estilo IEC Schneider Electric, de las gamas TeSys
D o TeSys
F
Square D Contactores de estilo NEMA, de la gama S
Rels de interposicin
En funcin de la tensin de la bobina del contactor utilizado, es posible que sea
necesario un rel de interposicin. En las tablas de las siguientes pginas, donde
se muestran las referencias y caractersticas de los contactores, se especifica la
necesidad de un rel de interposicin.
En los siguientes diagramas se ilustra el cableado del sistema sin y con el uso de
un rel de interposicin:
Instalacin
284 1639505 06/2009
Contactores IEC TeSys
D y TeSys
F
En la siguiente tabla se enumeran las caractersticas y referencias de catlogo de
los contactores IEC TeSys
D. Las tensiones de la bobina se agrupan en funcin
de si es necesario un rel de interposicin:
Referencias de
catlogo TeSys
D
Frecuencia de circuito
de control
(Hz)
VA o W
mantenido
(mx.)
Tensiones de bobina
No es necesario el rel
de interposicin
Es necesario el rel de
interposicin
LC1D09...LC1D38 50-60 7,5 CA = 24, 32, 36, 42, 48,
60, 100, 127, 200, 208,
220, 230, 240
CA = 277, 380, 400, 415,
440, 480, 575, 600, 690
6 CC (est.) = 24 CC (est.) = 36, 48, 60, 72,
96, 100, 110, 125, 155,
220, 250, 440, 575
2,4 CC (bajo consumo) = 24 CC (bajo consumo) = 48,
72, 96, 110, 220, 250
LC1D40...LC1D95 26 CA = 24, 32, 42, 48,
110, 115, 120, 127, 208,
220, 220/230, 230, 240
CA = 256, 277, 380, 380,
400, 400, 415, 440, 480,
500, 575, 600, 660
22 CC = 24, 36, 48, 60, 72,
110, 125, 220, 250, 440
LC1D115 18 CA = 24, 32, 42, 48,
110, 115, 120, 127, 208,
220, 230, 240
CA = 277, 380, 400, 415,
440, 480, 500
22 CC = 24, 48, 60, 72, 110,
125, 220, 250, 440
LC1D150 18 CA = 24, 32, 42, 48,
110, 115, 120, 127, 208,
220, 230, 240
CA = 277, 380, 400, 415,
440, 480, 500
5 CC = 24, 48, 60, 72, 110,
125, 220, 250, 440
Instalacin
1639505 06/2009 285
En la siguiente tabla se enumeran las caractersticas y referencias de catlogo de
los contactores IEC TeSys
F. Las tensiones de la bobina se agrupan en funcin de
si es necesario un rel de interposicin:
Referencias de
catlogo TeSys
F
Frecuencia de circuito
de control
(Hz)
VA o W
mantenido
(mx.)
Tensiones de bobina
No es necesario el rel
de interposicin
Es necesario el rel de
interposicin
LC1F115 50 45 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 380/400, 415/440,
500, 660, 1000
60 45 CA = 24, 42, 48,
110/115, 127, 220/230,
240, 265/277, 380, 415,
460/480, 660, 1000
5 CC = 24, 48, 110, 125,
220/230, 250, 440/460
LC1F150 50 45 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 380/400, 415/440,
500, 660, 1000
60 45 CA = 24, 42, 48,
110/115, 127, 220/230,
240, 265/277, 380, 415,
460/480, 660, 1000
5 CC = 24, 48, 110, 125,
220/230, 250, 440/460
LC1F185
(1)
50 55 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 380/400, 415/440,
500, 660, 1000
60 55 CA = 24, 42, 48,
110/115, 127, 220/230,
240, 265/277, 380, 415,
460/480, 660, 1000
5 CC = 24, 48, 110, 125,
220/230, 250, 440/460
LC1F225
(1)
50 55 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 380/400, 415/440,
500, 660, 1000
60 55 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 265/277, 380, 415,
460/480, 660, 1000
5 CC = 24, 48, 110, 125,
220/230, 250, 440/460
Instalacin
286 1639505 06/2009
(1) Los contactores doble-paralelo de este tamao necesitan un rel de
interposicin.
(2) La frecuencia del circuito de control puede estar entre 40 y 400 Hz; pero la
alimentacin de los contactores, supervisada por los CT, debe tener una frecuencia
de 50 Hz o 60 Hz.
LC1F265
40...400
(2)
10 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 277, 380/415,
480/500, 600/660, 1000
5 CC = 24 CC = 48, 110, 125,
220/230, 250, 440/460
LC1F330 10 CA = 24, 42, 48,
110/115, 127, 220/230,
240
CA = 277, 380/415,
480/500, 600/660, 1000
5 CC = 24 CC = 48, 110, 125,
220/230, 250, 440/460
LC1F400 15 CA = 48, 110/120, 125,
127, 200/208, 220/230,
230/240
CA = 265, 277, 380/400,
415/480, 500, 550/600,
1000
8 CC = 48, 110, 125, 220,
250, 440
LC1F500 18 CA = 48, 110/120, 127,
200/208, 220/230,
230/240, 265, 277,
380/400, 415/480, 500,
550/600, 1000
8 CC = 48, 110, 125, 220,
250, 440
LC1F630 22 CA = 48, 110/120, 125,
127, 200/208, 220/240
CA = 265/277, 380/400,
415/480, 500, 550/600,
1000
73 CC = 48, 110, 125, 220,
250, 440
LC1F780
(1)
50 CA = 110/120, 127,
200/208, 220/240
CA = 265/277, 380,
415/480, 500
52 CC = 110, 125, 220, 250,
440
LC1F800 15 CA = 110/127, 220/240 CA = 380/440
25 CC =110/127, 220/240,
380/440
Referencias de
catlogo TeSys
F
Frecuencia de circuito
de control
(Hz)
VA o W
mantenido
(mx.)
Tensiones de bobina
No es necesario el rel
de interposicin
Es necesario el rel de
interposicin
Instalacin
1639505 06/2009 287
Contactores Tipo S NEMA
En la siguiente tabla se enumeran las caractersticas y referencias de catlogo de
los contactores Tipo S NEMA. Las tensiones de la bobina se agrupan en funcin de
si es necesario un rel de interposicin:
Tamao
NEMA
VA mantenido
(mx.)
Frecuencia de circuito de
control
(Hz)
Tensiones de bobina
No es necesario el rel
de interposicin
Es necesario el rel de
interposicin
00 33 50/60
24, 115, 120, 208, 220,
240
277, 380, 440, 480, 550, 600
00, 0,1 27
2 37
38
3 47
89
115, 120, 208, 220, 240 277, 380, 440, 480, 550, 600
4
5 15 115, 120, 208, 220, 240 277, 380, 440, 480
6
59
115, 120, 208, 220, 240 277, 380, 440, 480, 550, 600
7
Instalacin
288 1639505 06/2009
5.2 Cableado de la red de comunicacin
Modbus
/TCP
Descripcin general
En esta seccin se describe cmo conectar un controlador LTM R a una red
Modbus/TCP utilizando un conector RJ45.
Se presentan tres topologas de red alternativas.
(1) Para ms informacin, consulte NEMA ICS 1.1 (ltima edicin), "Safety
Guidelines for the Application, Installation, and Maintenance of Solid State Control"
(Directrices de seguridad para la aplicacin, la instalacin y el mantenimiento del
control de estado esttico).
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
ADVERTENCIA
PRDIDA DE CONTROL
El diseador del esquema de control debe tener en cuenta los modos de fallo
de rutas de control posibles y, para ciertas funciones crticas, proporcionar los
medios para lograr un estado seguro durante y despus de un fallo de ruta.
Ejemplos de funciones crticas de control son la parada de emergencia y la
parada de sobrerrecorrido.
Para las funciones crticas de control deben proporcionarse rutas de control
separadas o redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicacin.
Deben tenerse en cuenta las implicaciones de retardos o fallos de transmisin
no anticipados del enlace
(1)
.
Cada implementacin de un controlador LTM R debe probarse de forma
individual y exhaustiva para comprobar su funcionamiento correcto antes de
ponerse en servicio.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Caractersticas del terminal de cableado del puerto de red Modbus
/TCP
289
Conexin a la red Modbus
/TCP
291
Instalacin
1639505 06/2009 289
Caractersticas del terminal de cableado del puerto de red Modbus
/TCP
Caractersticas generales
Las principales caractersticas fsicas de un puerto Ethernet son:
Interfaz fsica y conectores
El controlador LTM R incluye tres conectores RJ45 hembra apantallados en la cara
frontal. Dos de estos conectores (sealados con un crculo ms abajo) proporcionan
acceso al puerto de red Ethernet del controlador:
1 Puerto Ethernet nmero 1
2 Puerto Ethernet nmero 2
Interfaz fsica Ethernet 10/100BASE-T
Conector RJ45
Velocidad de transmisin 10 MB/100 MB
Instalacin
290 1639505 06/2009
Patillaje del conector de red Ethernet RJ45
El controlador LTM R se conecta a la red Ethernet utilizando uno o los dos
conectores RJ45 del puerto de red Ethernet, conforme al cableado siguiente:
El plano del cableado de RJ45 es:
MDIX automtico
En el controlador LTM R, cada conector RJ45 del puerto de red Ethernet es una
interfaz MDIX (Media dependent interface crossover). Cada conector detecta
automticamente:
El tipo de cable, recto o cruzado, conectado al conector.
Los requisitos de pines del dispositivo al que est conectado el controlador.
Utilizando esta informacin, cada conector asigna, transmite y recibe funciones de
combinaciones de pines de 1 y 2, y de 3 y 6, segn sea necesario, para
comunicarse con el dispositivo en el otro extremo del cable.
NOTA: El MDIX automtico le permite utilizar cables Ethernet de par trenzado de
categora 5, rectos o cruzados, para conectar un controlador LTM R a otro
dispositivo.
N. de pin Seal Par Descripcin
1 TD+ A Transmisin +
2 TD- A Transmisin -
3 RD+ B Recepcin +
4 No conectar
5 No conectar
6 RD- B Recepcin -
7 No conectar
8 No conectar
Instalacin
1639505 06/2009 291
Conexin a la red Modbus
/TCP
Conexin a la red
Cada controlador LTM R cuenta con un conmutador Ethernet de dos puertos
integrado que permite un diseo de red flexible y econmico. Las topologas de red
Modbus/TCP son:
estrella
encadenamiento
anillo, utilizando un conmutador Schneider Electric ConneXium compatible con
configuraciones en hiperanillo
El estndar IEEE 802.3 define Ethernet como implementado en el controlador
LTM R.
Caractersticas de red
Las caractersticas de la conexin a la red son las siguientes:
Designacin Descripcin
Tipo de cable Par trenzado apantallado de categora 5 cruzado o recto
Longitud mxima del cable
(encadenamiento o bucle [anillo]
encadenado)
100 m (328 ft)
Nmero mximo de dispositivos por subred 160
Nmero mximo de dispositivos por
segmento
Hasta 32 dispositivos en un encadenamiento o un bucle (anillo)
encadenado
Instalacin
292 1639505 06/2009
Topologa de estrella
En una topologa de estrella, cada controlador LTM R se conecta a un conmutador
externo, de la siguiente manera:
1 Maestro (PLC, PC o mdulo de comunicaciones)
2 Conmutador ConneXium
3 Cable Ethernet de par trenzado apantallado de categora 5 recto con conector RJ45
4 Cable Ethernet de par trenzado apantallado de categora 5 recto o cruzado con conector
RJ45
Instalacin
1639505 06/2009 293
Topologa de encadenamiento
Debido a que los controladores LTM R tienen un conmutador Ethernet de dos
puertos integrado, la topologa de encadenamiento, o bus Ethernet, no necesita
conmutadores ni concentradores entre los controladores:
1 Maestro (PLC, PC o mdulo de comunicaciones)
2 Cable Ethernet de par trenzado apantallado/sin apantallar de categora 5 recto o cruzado
con conector RJ45
Instalacin
294 1639505 06/2009
Topologa de anillo
Una topologa de anillo es un encadenamiento donde el ltimo controlador de la
cadena hace un bucle hacia el conmutador central. La topologa de anillo ofrece
redundancia. Si la red falla en cualquier punto, los segmentos de la red en cualquier
parte del fallo siguen funcionando como topologas de estrella o encadenamiento
por separado:
1 Maestro (PLC, PC o mdulo de comunicaciones)
2 Conmutador gestionado ConneXium con tecnologa hiperanillo
3 Cable Ethernet de par trenzado apantallado de categora 5 recto con conector RJ45
4 Cable Ethernet de par trenzado apantallado de categora 5 recto o cruzado con conector
RJ45
NOTA: El conmutador gestionado ConneXium con tecnologa hiperanillo incluye:
499NxSxxx: en la configuracin predeterminada, los puertos del conmutador 6 y
7 admiten el diseo en hiperanillo.
TCSESMxxx: ningn puerto del conmutador admite el diseo en hiperanillo de
forma predeterminada. Consulte el manual de usuario y las pginas web del
conmutador para obtener informacin sobre cmo configurar los puertos del
conmutador seleccionado para configuraciones en hiperanillo.
En el encendido, el conmutador gestionado tarda cerca de un minuto en descubrir
la topologa de anillo y establecer comunicacin entre los dispositivos.
Instalacin
1639505 06/2009 295
Para la proteccin contra interferencias:
Mantenga alejado el cable Ethernet de los cables de alimentacin (al menos a 30
cm [11.8 in.]).
En caso necesario, cruce el cable Ethernet y los cables de alimentacin en ngulos
rectos.
NOTA: Para obtener ms informacin, consulte la gua TSX DG KBL F:
"Compatibilidad electromagntica de las redes industriales y los buses de campo".
Instalacin
296 1639505 06/2009
1639505 06/2009 297
6
Puesta en marcha
1639505 06/2009
Puesta en marcha
Descripcin general
En este captulo se proporciona una descripcin general de la puesta en marcha del
controlador LTM R y el mdulo de expansin LTM E.
Contenido de este captulo
Este captulo contiene los siguiente apartados:
Apartado Pgina
Introduccin 298
Descripcin general de la puesta en marcha / Tratamiento de fallos FDR no
recuperables
301
Primer encendido 302
Parmetros necesarios y opcionales 305
Configuracin de FLC (Corriente a plena carga) 306
Comprobacin de la comunicacin Modbus
/TCP
309
Comprobacin del cableado del sistema 312
Comprobacin de la configuracin 316
Puesta en marcha
298 1639505 06/2009
Introduccin
Introduccin
La puesta en marcha debe realizarse despus de la instalacin fsica del
controlador LTM R, el mdulo de expansin LTM E y otros dispositivos de
hardware.
El proceso de puesta en marcha incluye:
inicializacin de los dispositivos instalados, y
configuracin de los parmetros del controlador LTM R que son necesarios para
el funcionamiento del controlador LTM R, el mdulo de expansin LTM E y otro
hardware del sistema
La persona encargada de la puesta en marcha debe estar familiarizada con el
hardware del sistema, y con el modo en que se instalar y utilizar en la aplicacin.
Los dispositivos de hardware incluyen:
motor
transformadores de tensin
transformadores de corriente de carga externa
transformadores de corriente de tierra
red de comunicacin
En las especificaciones del producto de estos dispositivos se proporciona
informacin acerca de los parmetros necesarios. Para poder configurar las
funciones de proteccin, supervisin y control de la aplicacin, es necesario
comprender el modo en que se utilizar el controlador LTM R.
Para obtener informacin acerca de cmo configurar los parmetros de control,
consulte Funciones de control del motor, pgina 183.
Para obtener informacin acerca de cmo configurar los parmetros de proteccin,
consulte Funciones de proteccin del motor, pgina 83.
Puesta en marcha
1639505 06/2009 299
Inicializacin
El controlador LTM R est listo para inicializarse una vez finalizada la instalacin
del hardware. Para inicializar el controlador LTM R:
Asegrese de que el motor est apagado.
A continuacin, encienda el controlador LTM R.
Ni el controlador LTM R ni el mdulo de expansin LTM E necesitan configuracin
de hardware adicional (por ejemplo, girar selectores o configurar conmutadores
DIP) para inicializarse. La primera vez que se enciende, el controlador LTM R entra
en estado inicial y est preparado para su puesta en marcha.
Herramientas de configuracin
Identifique el origen de control de configuracin, y la herramienta de configuracin,
antes de configurar los parmetros. El controlador LTM R y el mdulo de expansin
LTM E se pueden configurar localmente mediante un dispositivo HMI o a distancia
a travs de la conexin de red.
El controlador LTM R se puede poner en marcha utilizando:
una unidad de operador de control LTM CU
un PC con el software PowerSuite
un PLC conectado al puerto de red del controlador LTM R
Los siguientes parmetros identifican el origen de control de configuracin:
En este captulo se describe la puesta en marcha realizada a travs de la unidad de
operador de control LTM CU o el software PowerSuite.
ATENCIN
INICIALIZACIN INADECUADA
Desconecte la alimentacin del motor antes de inicializar el controlador LTM R.
Si no se siguen estas instrucciones pueden producirse lesiones personales
o daos en el equipo.
Parmetro Permite el uso de esta herramienta Ajuste de fbrica
Configuracin mediante teclado de HMI-activacin Unidad de operador de control TeSys T
LTM CU
Activado
Configuracin mediante herramienta HMI-activacin PC con el software PowerSuite Activado
Configuracin mediante puerto de red-activacin El puerto de red (PLC) Activado
Puesta en marcha
300 1639505 06/2009
Proceso de puesta en marcha
El proceso de puesta en marcha es el mismo, con independencia de la herramienta
de configuracin seleccionada. Este proceso incluye las siguientes etapas:
Etapa Descripcin
Primer encendido El controlador LTM R se inicializa, y est preparado para la configuracin de los
parmetros.
Configuracin de los
parmetros necesarios
Configure estos parmetros para que el controlador LTM R abandone su estado de
inicializacin. El controlador LTM R est listo para las operaciones.
Configuracin de los
parmetros opcionales
Configure estos parmetros para permitir las funciones del controlador LTM R que
necesita la aplicacin.
Comprobacin del hardware Compruebe el cableado del hardware.
Comprobacin de la
configuracin
Confirme la exactitud de los parmetros.
Puesta en marcha
1639505 06/2009 301
Descripcin general de la puesta en marcha / Tratamiento de fallos FDR no
recuperables
Descripcin general
La puesta en marcha de la versin de protocolo Modbus/TCP del controlador LTM R
puede requerir la configuracin de un servidor a distancia utilizado para
proporcionar los servicios de direccionamiento IP y FDR de forma peridica.
En esta seccin se proporciona una descripcin general del proceso general que
deber seguir para:
poner en marcha un nuevo controlador y
recuperarse de un fallo FDR que de otro modo sera irrecuperable
NOTA: Un fallo FDR irrecuperable puede producirse, por ejemplo, cuando intenta
sustituir una versin existente del controlador LTM R (un LTMR08EBD, por
ejemplo) por una versin distinta del controlador (un LTMR100EBD, por ejemplo).
De esta forma, se configura el parmetro Estado FDR del puerto de red (490.8-
11) = 13 ("La versin del archivo de parmetros del dispositivo no coincide").
Proceso de puesta en marcha
Para poner en marcha cualquier versin del protocolo Modbus/TCP del controlador
LTM R o, de forma ms especfica, para recuperarse de un fallo de FDR que de otro
modo sera irrecuperable, siga este proceso:
Paso Descripcin
1 Utilice el software PowerSuite para abrir la configuracin guardada
anteriormente o, si no est disponible, la configuracin predeterminada.
2 En PowerSuite, haga los cambios deseados en los parmetros obligatorios y el
resto de parmetros.
3 Una vez editado el archivo de configuracin, conecte su PC con el software
PowerSuite al controlador LTM R mediante:
uno de los dos conectores Ethernet de puerto de red del controlador
(recomendado), o
el puerto HMI
4 Descargue la nueva configuracin en el controlador LTM R. Este proceso se
describe en la segunda tabla en el tema Transferencia de archivos entre el
LTM R y el PC (vase pgina 378).
5 Si el servicio FDR se ha activado para el controlador LTM R, o si los
conmutadores rotatorios del controlador se han configurado para recibir ajustes
de direccionamiento IP a travs de DHCP, transfiera manualmente una copia
del archivo de configuracin al servidor FDR. Este proceso se describe en el
tema Transferencia de archivos entre el LTM R y el servidor FDR
(vase pgina 379).
6 Apague y encienda el controlador LTM R.
Puesta en marcha
302 1639505 06/2009
Primer encendido
Descripcin general
El primer encendido describe el primer ciclo de alimentacin a:
un nuevo controlador LTM R, o
un controlador LTM R que ya se ha puesto en marcha, pero cuyos parmetros
se han restaurado a los ajustes de fbrica, debido a:
la ejecucin de Borrar todo-comando, o
una actualizacin del firmware
La primera vez que se enciende, el controlador LTM R entra en un estado
bloqueado, no configurado, llamado estado de inicializacin, y se activa el
parmetro Controlador-configuracin necesaria de sistema. El controlador LTM R
no sale de este estado hasta que se configuran determinados parmetros, llamados
parmetros necesarios.
Cuando se he realizado la puesta en marcha, el controlador LTM R deja de estar
bloqueado y est preparado para las operaciones. Para obtener informacin acerca
de los estados de funcionamiento, consulte Estados de funcionamiento,
pgina 190.
Puesta en marcha
1639505 06/2009 303
Primer encendido en la LTM CU
Mediante la unidad de operador de control LTM CU , al configurar los parmetros
de men Menu First Setup se borra el parmetro Controlador-configuracin
necesaria de sistema y el controlador LTM R sale de su estado de inicializacin.
La primera vez que se enciende el controlador LTM R despus de abandonar la
fbrica, la pantalla LCD de la unidad de operador de control LTM CU automti-
camente muestra el men First Setup, con una lista de parmetros que deben
configurarse inmediatamente:
Cuando se configuran todos los parmetros, el ltimo elemento del men en
aparecer es End Config:
Haga clic en OK.
Haga clic en Yes para guardar la configuracin.
Cuando la configuracin se ha guardado, el men First Setup no se vuelve a
mostrar.
Para obtener ms informacin, consulte el manual de usuario de TeSys T LTM CU
Unidad de operador de control.
OK
First setup
Phases
Load CT ratio
OK
First setup
Local channel
End Config
OK
End Config
Local channel
Yes
No
Puesta en marcha
304 1639505 06/2009
Primer encendido en el software PowerSuite
Mediante el software PowerSuite, todos los parmetros, necesarios y opcionales,
se configuran sin conexin y luego se descargan al controlador LTM R en un
archivo de configuracin. Si la descarga tiene xito, se borra el parmetro
Controlador-configuracin necesaria de sistema, y el controlador LTM R sale de su
estado de inicializacin.
La primera vez que se enciende el controlador LTM R despus de abandonar la
fbrica, el software PowerSuite muestra el siguiente mensaje:
Este mensaje indica que el controlador LTM R se encuentra en estado de iniciali-
zacin. Antes de que el controlador LTM R se pueda utilizar en las operaciones, es
necesario descargar un archivo de configuracin que contiene todos los ajustes.
Para obtener informacin acerca de cmo trabajar con archivos de configuracin,
incluida la transferencia de ajustes de configuracin desde el PC al controlador
LTM R, consulte Gestin de archivos.
NOTA: El proceso para configurar los parmetros mediante el software
PowerSuite en el primer encendido o en cualquier momento es el mismo.
Puesta en marcha
1639505 06/2009 305
Parmetros necesarios y opcionales
Introduccin
Adems de los parmetros necesarios, es posible que tenga que configurar
parmetros opcionales en el primer encendido o en un momento posterior.
En el HMI LTM CU
En el HMI LTM CU, los parmetros necesarios y opcionales se encuentran en los 5
submens del Men.
En el software PowerSuite
En el software PowerSuite, los parmetros necesarios y opcionales se encuentran
en los 6 submens del men Ajustes.
Puesta en marcha
306 1639505 06/2009
Configuracin de FLC (Corriente a plena carga)
Definicin de FLC
La corriente a plena carga (FLC) representa la corriente real a plena carga del motor
protegido por el controlador LTM R. El parmetro FLC es una caracterstica del
motor cuyo valor se puede encontrar en su placa.
Muchos parmetros de proteccin se establecen como un mltiplo de FLC.
El parmetro FLC se puede ajustar de FLCmn a FLCmx.
Ms abajo se detallan ejemplos de configuracin de FLC.
Otras definiciones
CT de carga-relacin = CT de carga-primario / (CT de carga-secundario * Pasos)
Corriente-mx. del sensor = Corriente-rango mx. * CT de carga-relacin
El parmetro corriente-rango mx. lo determina el controlador-referencia
comercial LTM R. Se almacena en unidades de 0,1 A y tiene uno de los siguientes
valores: 8,0, 27,0 o 100,0 A.
El parmetro contactor-calibre se almacena en unidades de 0,1 A y lo define el
usuario entre 1,0 y 1000,0 A.
FLCmx se define como el mnimo valor entre corriente-mx. del sensor y
contactor-calibre.
FLCmn = Corriente-mx. del sensor / 20 (redondeado al 0,01 A ms cercano).
FLCmn se almacena internamente en unidades de 0,01 A.
NOTA:
La modificacin del contactor-calibre y/o CT de carga-relacin modifica el valor
de FLC.
No ajuste el valor de FLC por debajo del de FLCmn.
Conversin de amperios a valores de FLC
Los valores de FLC se almacenan como un porcentaje de FLCmax.
FLC (en %) = FLC (en A) / FLCmax.
NOTA: Los valores de FLC deben expresarse como un porcentaje de FLCmax
(resolucin del 1%). Si introduce un valor no autorizado, el LTM R lo redondear al
valor autorizado ms cercano. Por ejemplo, en una unidad de 0,4-8 A, el paso entre
FLC es de 0,08 A. Si intenta configurar un valor de FLC de 0,43 A, el LTM R lo
redondear a 0,4 A.
Puesta en marcha
1639505 06/2009 307
Ejemplo 1 (sin CT externos)
Datos:
FLC (en A) = 0,43 A
Corriente-rango mx. = 8,0 A
CT de carga-primario = 1
CT de carga-secundario = 1
Pasos = 1
Contactor-calibre = 810,0 A
Parmetros calculados con 1 paso:
CT de carga-relacin = CT de carga-primario / (CT de carga-secundario * Pasos)
= 1 / (1 * 1) = 1,0
Corriente-mx. del sensor = Corriente-rango mx. * CT de carga-relacin
= 8,0 * 1,0 = 8,0 A
FLCmx = mn (Corriente-mx. del sensor, Contactor-calibre) = mn (8,0, 810,0)
= 8,0 A
FLCmn = Corriente-mx. del sensor / 20 = 8,0 / 20 = 0,40 A
FLC (in %) = FLC (en A) / FLCmx = 0,43 / 8,0 = 5%
Ejemplo 2 (sin CT externos, mltiples pasos)
Datos:
FLC (en A) = 0,43 A
Corriente-rango mx. = 8,0 A
CT de carga-primario = 1
CT de carga-secundario = 1
Pasos = 5
Contactor-calibre = 810,0 A
Parmetros calculados con 5 pasos:
CT de carga-relacin = CT de carga-primario / (CT de carga-secundario * Pasos)
= 1 / (1 * 5) = 0,2
Corriente-mx. del sensor = Corriente-rango mx. * CT de carga-relacin
= 8,0 * 0,2 = 1,6 A
FLCmax = mn (Corriente-mx. del sensor, Contactor-calibre) = mn (1,6, 810,0)
= 1,6 A
FLCmin = Corriente-mx. del sensor / 20 = 1,6 / 20 = 0,08 A
FLC (in %) = FLC (en A) / FLCmx = 0,43 / 1,6 = 27 %
Puesta en marcha
308 1639505 06/2009
Ejemplo 3 (CT externos, contactor-calibre reducido)
Datos:
FLC (en A) = 135 A
Corriente-rango mx. = 8,0 A
CT de carga-primario = 200
CT de carga-secundario = 1
Pasos = 1
Contactor-calibre = 150,0 A
Parmetros calculados con 1 paso:
CT de carga-relacin = CT de carga-primario / (CT de carga-secundario * Pasos)
= 200 / (1 * 1) = 200.0
Corriente-mx. del sensor = Corriente-rango mx. * CT de carga-relacin
= 8,0 * 200,0 = 1600,0 A
FLCmax = mn (Corriente-mx. del sensor, Contactor-calibre)
= mn (1600,0, 150,0) = 150,0 A
FLCmin = Corriente-mx. del sensor / 20 = 1600,0 / 20 = 80,0 A
FLC (in %) = FLC (en A) / FLCmax = 135 / 150,0 = 90 %
Puesta en marcha
1639505 06/2009 309
Comprobacin de la comunicacin Modbus
/TCP
Introduccin
Configure en ltimo lugar la funcin de red. Aunque los conectores estn
conectados, la comunicacin entre el controlador o controladores y el PLC no puede
comenzar hasta que se hayan introducido los parmetros de comunicacin
correctos a travs del software PowerSuite o el HMI. Para seleccionar los
parmetros de comunicacin, consulte Configuracin de la comunicacin Ethernet
del puerto de red, pgina 446.
Luego, puede comprobar si el sistema se comunica correctamente.
La secuencia de comprobacin de la comunicacin Modbus es la siguiente:
Puesta en marcha
310 1639505 06/2009
Paso 1
En la cara frontal del controlador LTM R, compruebe los 3 LED siguientes:
1. Fallback
2. STS
3. LK/ACT
En la figura se muestra la cara frontal del LTM R con todos los LED de
comunicacin Modbus/TCP sealados con un crculo:
La recuperacin de la comunicacin se indica con un LED rojo (1), de la manera
siguiente:
LED de recuperacin Estado de recuperacin
APAGADO El LTM R no est en modo de recuperacin de la comunicacin.
ENCENDIDO El LTM R est en modo de recuperacin de la comunicacin.
Puesta en marcha
1639505 06/2009 311
El estado de la comunicacin Modbus/TCP, la velocidad del enlace y la actividad se
determinan utilizando el LED STS verde (2) y el LED LK/ACT verde (3):
NOTA: Para obtener una descripcin del comportamiento del LED STS durante el
arranque, consulte la descripcin de Asignacin IP y LED STS (vase pgina 410).
Paso 2
Si el producto est estableciendo comunicacin pero los LED no indican una
conexin, compruebe los cables y conectores y corrija los posibles problemas de
conexin.
Paso 3
Si el dispositivo sigue sin establecer comunicacin, compruebe la configuracin
mediante:
El software PowerSuite.
El HMI.
LED STS LED de actividad/enlace Descripcin
ENCENDIDO ENCENDIDO Conexin establecida
Velocidad = 100 Mbits/s
APAGADO Conexin establecida
Velocidad = 10 Mbits/s
ENCENDIDO parpadeando Actividad de comunicacin de red
APAGADO APAGADO No se ha establecido ninguna conexin
2 parpadeos (no aplicable) Ninguna direccin MAC
3 parpadeos (no aplicable) Sin parpadeo
4 parpadeos (no aplicable) Condicin de IP duplicada
5 parpadeos (no aplicable) Esperando la configuracin IP servida
6 parpadeos (no aplicable) Utilizando la configuracin IP predeterminada
7 parpadeos (no aplicable) Actualizacin del firmware en curso
8 parpadeos (no aplicable) Error crtico
10 parpadeos (no aplicable) Ningn servidor FDR disponible
Puesta en marcha
312 1639505 06/2009
Comprobacin del cableado del sistema
Descripcin general
Una vez configurados todos los parmetros necesarios y opcionales, asegrese de
comprobar el cableado del sistema. Este proceso puede incluir:
cableado de fuerza del motor
cableado del controlador LTM R
cableado del transformador de corriente externa
cableado de diagnstico
cableado de E/S
Cableado de fuerza del motor
Para comprobar el cableado de fuerza del motor, siga estos pasos:
Examine Accin
La placa de caractersticas del motor Confirme que el motor genera corriente y tensin dentro de los
intervalos del controlador LTM R.
El diagrama del cableado de fuerza Confirme visualmente que el cableado de fuerza real se
corresponde con el previsto, como se describe en el diagrama
del cableado de fuerza.
La lista de fallos y advertencias en el software
PowerSuite o la pantalla LCD del dispositivo HMI
Busque los siguientes fallos o advertencias:
potencia excesiva
potencia insuficiente
factor de potencia excesivo
factor de potencia insuficiente
La lista de todos los parmetros, o de los de slo
lectura, en el software PowerSuite o la pantalla
desplazable HMI del dispositivo HMI
Busque valores inesperados en los siguientes parmetros:
potencia activa
potencia reactiva
factor de potencia
Puesta en marcha
1639505 06/2009 313
Cableado del circuito de control
Para comprobar el cableado del circuito de control, siga estos pasos:
Cableado del transformador de corriente
Compruebe el cableado del transformador de corriente de carga y, si la aplicacin
incluye transformadores de corriente de carga externa, compruebe tambin ese
cableado prestando atencin a lo siguiente:
Examine Accin
El diagrama del cableado de control Confirme visualmente que el cableado de control real se
corresponde con el previsto, como se describe en el diagrama
del cableado de control.
El LED de encendido del controlador LTM R Si el LED est apagado, es posible que el controlador LTM R
no est recibiendo alimentacin.
El LED de HMI del controlador LTM R Si el LED est apagado, es posible que el controlador LTM R
no se est comunicando con el mdulo de expansin.
El LED de encendido del mdulo de expansin
LTM E
Si el LED est apagado, es posible que el mdulo de expansin
LTM E no est recibiendo alimentacin.
Examine Accin
El diagrama de cableado del transformador de
corriente externa
Confirme visualmente que el cableado real se corresponde con
el previsto, como se describe en el diagrama de cableado.
Los siguientes parmetros de CT de carga,
mediante el software PowerSuite:
CT de carga-relacin
CT de carga-primario
CT de carga-secundario
CT de carga-mltiples pasos
Confirme que el parmetro CT de carga-relacin, o la
combinacin de los parmetros CT de carga-primario y CT de
carga-secundario reflejan de forma precisa la relacin del CT
de carga prevista.
Confirme visualmente que el parmetro CT de carga-mltiples
pasos refleja de forma precisa el nmero de pasos que realiza
el cableado a travs de las ventanas de CT integradas del
controlador LTM R.
El siguiente parmetro del motor de carga,
mediante el software PowerSuite:
Motor-fases
Confirme visualmente que el motor y el controlador LTM R
estn cableados de acuerdo con el nmero de fases fijado en
el parmetro Motor-fases.
El siguiente parmetro del motor de carga,
mediante el software PowerSuite o la pantalla LCD
del dispositivo HMI:
Motor-secuencia de fases
Si el motor es un motor trifsico, compruebe visualmente que la
secuencia de fases de cableado se corresponde con el
parmetro Motor-secuencia de fases.
Puesta en marcha
314 1639505 06/2009
Cableado de diagnstico
Compruebe el cableado de cualquier dispositivo sensor de temperatura del motor o
transformador de corriente de tierra externa, si la aplicacin incluye tales
dispositivos, prestando atencin a lo siguiente:
Examine Accin
El diagrama de cableado Confirme visualmente que el cableado real se corresponde con
el previsto, como se describe en el diagrama de cableado.
Las especificaciones del CT de tierra externa
- y -
Los siguientes parmetros de CT de tierra,
mediante el software PowerSuite:
CT de tierra-primario
CT de tierra-secundario
Confirme que la combinacin de los parmetros CT de tierra-
primario y CT de tierra-secundario refleja de forma precisa la
relacin de CT de tierra prevista.
Las especificaciones del sensor de temperatura del
motor
- y -
El siguiente parmetro, mediante el software
PowerSuite o la pantalla LCD del dispositivo HMI:
Motor-sensor de temperatura
Confirme que el sensor de temperatura del motor utilizado es
del mismo tipo que el definido en el parmetro Motor-sensor de
temperatura.
Puesta en marcha
1639505 06/2009 315
Cableado de E/S
Compruebe el cableado de las conexiones de E/S, prestando atencin a lo
siguiente:
Examine Accin
El diagrama de cableado Confirme visualmente que el cableado real se corresponde con
el previsto, como se describe en el diagrama de cableado.
Los botones AUX1 (Marcha 1), AUX2 (Marcha 2) y
de parada del dispositivo HMI
- y -
El siguiente parmetro, mediante el software
PowerSuite o la pantalla LCD del dispositivo
HMI:
Control de ajuste de canal local
Confirme que cada comando realiza la funcin de arranque o
parada prevista, cuando el control tiene lugar a travs del
bornero de conexin o el puerto HMI.
El botn de rearme del dispositivo HMI
- y -
El siguiente parmetro, mediante el software
PowerSuite o la pantalla LCD del dispositivo HMI:
Sobrecarga trmica-reinicio tras fallo
Confirme que el HMI puede enviar un comando de rearme tras
fallo manual cuando el control est definido como manual.
El PLC, si el controlador LTM R est conectado a
una red
- y -
El siguiente parmetro, mediante el software
PowerSuite o la pantalla LCD del dispositivo HMI:
Sobrecarga trmica-reinicio tras fallo
Confirme que el PLC puede ordenar las funciones de arranque,
parada y rearme a distancia previstas.
Puesta en marcha
316 1639505 06/2009
Comprobacin de la configuracin
Descripcin general
El paso final en el proceso de puesta en marcha es comprobar que todos los
parmetros configurables utilizados en la aplicacin estn configurados de forma
correcta.
Cuando realice esta tarea, necesitar una lista maestra de todos los parmetros
que tiene previsto configurar y los ajustes deseados. Debe comparar los ajustes
reales de los parmetros configurados con esta lista.
Proceso
La comprobacin de los ajustes de los parmetros es un proceso de 3 partes:
Transfiera el archivo de configuracin desde el controlador LTM R al software
PowerSuite que se ejecuta en el PC. De esta manera, podr ver los ajustes de
parmetros actuales del controlador LTM R.
Para obtener informacin acerca de cmo transferir archivos desde el
controlador LTM R al PC, consulte Gestin de archivos (vase pgina 378).
Compare la lista maestra de parmetros y ajustes previstos con los mismos
ajustes situados en la rama Settings del control del men del software
PowerSuite.
Cambie los ajustes de configuracin, segn crea conveniente. Para ello, utilice:
El software PowerSuite y, a continuacin, descargue el archivo editado del PC
al controlador LTM R.
Para obtener informacin acerca de cmo transferir archivos desde el PC al
controlador LTM R, consulte Gestin de archivos (vase pgina 378).
HMI LTM CU. Para editar los parmetros ubicados en el men, vaya hasta los
ajustes del submen y haga las modificaciones oportunas.
Para obtener informacin acerca de los ajustes necesarios, consulte Parmetros
necesarios y opcionales, pgina 305.
1639505 06/2009 317
7
Uso
1639505 06/2009
Uso
Descripcin general
En este captulo se describe:
los dispositivos de interfaz de usuario y las configuraciones de hardware que se
pueden utilizar con el controlador LTM R
cmo ajustar los parmetros con cada interfaz de usuario
cmo realizar las funciones de supervisin, gestin de fallos y control con cada
interfaz de usuario.
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
7.1 Uso del controlador LTM R solamente 318
7.2 Uso de la unidad de operador de control LTM CU 324
7.3
Configurar el XBTN410 de Magelis
328
7.4
Uso del HMI XBTN410 de Magelis
(1 a varios)
332
7.5 Utilizar el software PowerSuite 372
7.6 Utilizar los servicios Ethernet 399
7.7
Utilizar la red de comunicacin Modbus
/TCP
441
7.8 Utilizar la interfaz de usuario del servidor web estndar 516
Uso
318 1639505 06/2009
7.1 Uso del controlador LTM R solamente
Descripcin general
En esta seccin se describe cmo utilizar el controlador LTM R, solo o conectado a
un mdulo de expansin LTM E, en una configuracin independiente sin un
dispositivo de interfaz de usuario.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Configuraciones de hardware 319
Configuracin independiente 320
Uso
1639505 06/2009 319
Configuraciones de hardware
Descripcin general
El controlador LTM R, bien en solitario o conectado a un mdulo de expansin
LTM E, se puede utilizar con o sin dispositivo de interfaz de usuario.
Sea cual sea la configuracin, el controlador LTM R se puede configurar para
realizar funciones de supervisin, gestin de fallos, proteccin del motor y control.
Todos los dispositivos de interfaz de usuario requieren una fuente de alimentacin
independiente.
Comunicaciones
Los dispositivos de interfaz de usuario y sus interfaces de comunicacin son:
NOTA: Para obtener ms informacin acerca del LTM CU, consulte el manual de
usuario de TeSys T LTM CU Unidad de operador de control.
Dispositivo de interfaz de usuario Se comunica a travs de
HMI XBTN410 de Magelis
Puerto HMI a travs del conector RJ45 local del controlador LTM R
o el mdulo de expansin LTM E
Unidad de operador de control
TeSys
T LTM CU
Puerto HMI a travs del conector RJ45 local del controlador LTM R
o el mdulo de expansin LTM E
PC con el software PowerSuite Puerto HMI a travs del conector RJ45 local del controlador LTM R
o el mdulo de expansin LTM E
PLC de red Puerto de red en el controlador LTM R a travs del conector de red
RJ45 o el cableado de terminales
Uso
320 1639505 06/2009
Configuracin independiente
Descripcin general
Antes de que el controlador LTM R pueda funcionar en una configuracin
independiente, deben ajustarse los parmetros a travs del dispositivo HMI de su
eleccin.
NOTA: Slo el software PowerSuite puede configurar todos los parmetros de
comunicacin de red Ethernet del controlador.
Una vez ajustados los parmetros, el dispositivo se puede desconectar y puede
utilizar los siguientes controles para manejar el controlador LTM R:
Utilice este control Para
LED:
5 LED del controlador LTM R
5 LED del mdulo de expansin
LTM E
Supervisar el estado del controlador LTM R y el mdulo de expansin
LTM E
Botn Test/Reset del controlador LTM R Gestionar fallos
Parmetros de funcionamiento
programados
Entradas digitales:
6 entradas del controlador LTM R
4 entradas del mdulo de expansin
LTM E
Controlar los siguientes componentes:
controlador LTM R
mdulo de expansin LTM E
motor
cableado de alimentacin y control
sensores conectados, por ejemplo:
sensores de temperatura del motor
CT de fallo a tierra externa
Parmetros de proteccin programados Proteger los siguientes componentes:
controlador LTM R
mdulo de expansin LTM E
motor
equipo
Uso
1639505 06/2009 321
Configuraciones
A continuacin se representan las configuraciones fsicas independientes del
controlador LTM R, con o sin un mdulo de expansin LTM E conectado:
El controlador LTM R solo
El controlador LTM R y el mdulo de expansin LTM E
Uso
322 1639505 06/2009
LED del controlador LTM R
Utilice los 7 LED de la parte frontal del controlador LTM R para supervisar su
estado, de la manera siguiente:
NOTA: Para obtener una descripcin del comportamiento del LED STS durante el
arranque, consulte la descripcin de Asignacin IP y LED STS (vase pgina 410).
LED Color Describe Indica
HMI Comm Amarillo Actividad de comunicacin entre el
controlador LTM R y el mdulo de
expansin LTM E
Encendido = comunicacin
Apagado = sin comunicacin
Power Verde Condicin de alimentacin o fallo interno
del controlador LTM R
Verde = alimentacin activada, sin fallos
internos y motor parado
Parpadeo verde = alimentacin activada,
sin fallos internos y motor en marcha
Apagado = alimentacin desactivada, o
existen fallos internos
Alarm Rojo Advertencia o fallo de proteccin, o
condicin de fallo interno
Rojo = fallo interno o de proteccin
Parpadeo rojo (2 x por s) = advertencia
Parpadeo rojo (5 x por s) = condicin de
descarga o ciclo rpido
Apagado = sin fallos, advertencias,
descarga o ciclo rpido (cuando la
alimentacin est activada)
Fallback Rojo Conexin de comunicacin entre el
controlador LTM R y el mdulo de red
Rojo = en recuperacin
Apagado = no en recuperacin (sin
alimentacin)
STS Verde Estos LED indican de forma conjunta la
comunicacin de red: conexin, velocidad
y actividad
Si el LED STS verde est ENCENDIDO, y el
LED LK/ACT verde est:
ENCENDIDO, indica:
Conexin establecida
Velocidad = 100 Mbits/s
APAGADO, indica:
Conexin establecida
Velocidad = 10 Mbits/s
El parpadeo indica actividad
Si el LED STS y el LED LK/ACT estn
APAGADOS, no se ha establecido ninguna
conexin.
LK/ACT Verde
Uso
1639505 06/2009 323
LED del mdulo de expansin LTM E
Utilice los 5 LED de la parte frontal del mdulo de expansin para supervisar su
estado de funcionamiento y comunicacin, de la manera siguiente:
Test / Reset
Utilice el botn Test/Reset para realizar las siguientes funciones:
LED Color Describe Indica
Power Verde o rojo Alimentacin del mdulo o
condicin de fallo interno
Verde = alimentacin activada sin fallos
internos
Rojo = alimentacin activada con fallos
internos
Apagado = alimentacin desactivada
Entradas digitales
I.7, I.8, I.9 e I.10
Amarillo Estado de entrada Encendido = entrada activada
Apagado = entrada no activada
Funcin Descripcin Procedimiento
Rearme tras fallo Pone a cero todos los fallos que se pueden poner a cero.
Consulte Descripcin general, pgina 231 para obtener
ms informacin acerca de cmo poner a cero los fallos.
Pulse el botn y sultelo en 3 s.
Comprobacin
automtica
(consulte
Comprobacin
automtica con
el motor
encendido,
pgina 570)
Realiza una comprobacin automtica si:
no existen fallos
la funcin de comprobacin automtica est activada
Pulse y mantenga pulsado el botn
durante ms de 3 s hasta un mximo
de 15 s.
Prueba de LED: se apagan todos los LED, despus se
enciende cada uno por orden:
LED de actividad de comunicacin del HMI
LED de encendido
LED de recuperacin
LED de actividad de comunicacin del PLC
Al final de la comprobacin, todos los LED vuelven a su
estado original.
Retorno local a
los ajustes de
fbrica
Devuelve el controlador LTM R a sus ajustes de fbrica,
siempre que el producto se encuentre en uno de los
estados siguientes: Listo, No listo o Configuracin del
sistema. Si el producto se encuentra en estado de
Arranque o Marcha, se ignorar la solicitud de retorno a
los ajustes de fbrica.
Cuando se pulsa el botn Reset durante ms de 15 s, el
LED de fallo parpadea a 2 Hz. Si se suelta el botn Reset,
el producto ejecutar un retorno a los ajustes de fbrica.
Pulse y mantenga pulsado el botn
durante ms de 15 s sin superar los 20
s.
Provoca un fallo Pone el controlador LTM R en condicin de fallo interno. Pulse y mantenga pulsado el botn
durante ms de 20 s.
Uso
324 1639505 06/2009
7.2 Uso de la unidad de operador de control LTM CU
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Presentacin de la unidad de operador de control LTM CU 325
Configuracin del puerto HMI 326
Uso
1639505 06/2009 325
Presentacin de la unidad de operador de control LTM CU
Objetivo del producto
La unidad de operador de control LTM CU es un terminal de operador a distancia
que permite configurar, supervisar y controlar el controlador LTM R como parte del
sistema de gestin de motores TeSys
T. La LTM CU ha sido concebida con el
objetivo especfico de actuar como el dispositivo HMI (Human Machine Interface)
del controlador LTM R y recibe la alimentacin internamente desde el LTM R.
En el diagrama siguiente se muestra la cara frontal de la LTM CU:
Funciones de la LTM CU
La LTM CU se puede utilizar para:
Configurar parmetros del controlador LTM R.
Mostrar informacin sobre la configuracin y el funcionamiento del controlador
LTM R.
Supervisar advertencias y fallos detectados por el controlador.
Controlar el motor de forma local mediante la interfaz de control local.
Para obtener ms informacin:
Consulte el manual del usuario de TeSys T LTM CU Unidad de operador de
control.
Uso
326 1639505 06/2009
Configuracin del puerto HMI
Puerto HMI
El puerto HMI es el puerto RJ45 del controlador LTM R o del mdulo de expansin
LTM E utilizado para conectar el controlador LTM R a un dispositivo HMI, como un
XBT de Magelis
, un TeSys
T LTM CU o un PC con el software PowerSuite.
Parmetros de comunicacin
Utilice el software PowerSuite o el HMI para modificar los parmetros de
comunicacin del puerto HMI predeterminados:
HMI-ajuste de direccin de puerto
HMI-ajuste de velocidad de transmisin en baudios del puerto
HMI-ajuste de paridad de puerto
HMI-ajuste endian de puerto
HMI-ajuste de direccin de puerto
La direccin del puerto HMI se puede establecer entre 1 y 247.
El ajuste de fbrica es 1, que corresponde a un valor indefinido.
HMI-ajuste de velocidad de transmisin en baudios del puerto
Las velocidades de transmisin posibles son:
1200 baudios
4800 baudios
9600 baudios
19.200 baudios (ajuste de fbrica)
HMI-ajuste de paridad de puerto
Se puede seleccionar la paridad entre:
Par (ajuste de fbrica)
Ninguna
El comportamiento de la paridad y el bit de parada est vinculado:
Si la paridad es... El nmero de bits de parada es...
Par 1
Ninguna 2
Uso
1639505 06/2009 327
HMI-ajuste endian de puerto
El parmetro HMI-ajuste endian de puerto permite alternar las 2 palabras de una
palabra doble.
0 = la palabra menos significativa primero (little endian)
1 = la palabra ms significativa primero (big endian, ajuste de fbrica)
HMI-ajuste de recuperacin de puerto
El parmetro HMI-ajuste de recuperacin de puerto se utiliza para ajustar el modo
de recuperacin en caso de prdida de comunicacin con el PLC. Para obtener ms
informacin, consulte ajuste de recuperacin de puerto (vase pgina 63).
Uso
328 1639505 06/2009
7.3
Configurar el XBTN410 de Magelis
Descripcin general
El HMI XBTN410 de Magelis
se puede utilizar para manejar hasta 8 controladores
LTM R, en una configuracin fsica de 1 HMI a varios controladores LTM R (1 a
varios).
El HMI presenta una interfaz de usuario nica, que incluye una pantalla LCD y un
teclado, y requiere el uso de:
un archivo de aplicacin de software, y
una etiqueta de teclado
En esta seccin se muestra cmo obtener e instalar una aplicacin de software en
el XBTN410 de Magelis para una configuracin de 1 a varios.
Consulte el manual de instrucciones de XBT-N que se incluye en el HMI XBTN410
de Magelis para saber cmo seleccionar e instalar la etiqueta de teclado adecuada
para su configuracin.
Despus de conectar el puerto HMI, consulte las instrucciones sobre la
configuracin del puerto HMI (vase pgina 326)
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Instalar el software de programacin XBT L1000 de Magelis
329
Descargar archivos de la aplicacin de software de 1 a varios 330
Transferir los archivos de software de la aplicacin al HMI XBTN410 de
Magelis
331
Uso
1639505 06/2009 329
Instalar el software de programacin XBT L1000 de Magelis
Descripcin general
El controlador LTM R incluye una copia del software de programacin XBT L1000
de Magelis
. Deber hacer dos cosas:
instalar el software de programacin XBT L1000 de Magelis en el PC, y
utilizarlo para transferir una aplicacin de software de 1 a varios al HMI XBTN410
de Magelis
NOTA: Magelis El software de programacin XBT L1000 constituye una potente
herramienta de programacin. En este documento nicamente se describe su
utilidad a la hora de abrir y transferir aplicaciones de software ya programadas al
HMI XBTN410 de Magelis. Para obtener informacin adicional acerca del software
de programacin XBT L1000 de Magelis, consulte el archivo de ayuda y la
documentacin impresa.
Para obtener instrucciones acerca de cmo descargar aplicaciones de software de
1 a varios, consulte Descargar archivos de la aplicacin de software de 1 a varios,
pgina 330.
Para obtener instrucciones acerca de cmo transferir aplicaciones de software de 1
a varios desde el PC al HMI XBTN410 de Magelis, consulte pgina 331.
Pasos de la instalacin
Para instalar el software de programacin XBT L1000 de Magelis en el PC:
Paso Accin
1 Coloque el disco de instalacin en la unidad de disco del PC. El programa de instalacin debe comenzar.
2
Si no lo hace, utilice el explorador de Microsoft
Windows
para desplazarse hasta el archivo y haga clic
en Setup.exe.
3 Si aparece alguna pantalla que no requiere realizar ninguna accin, haga clic en Siguiente.
4 En la pantalla de idioma, seleccione un idioma y haga clic en OK.
5 En la pantalla de nombre y empresa, escriba su nombre y el de su empresa (o acepte los valores
predeterminados) y haga clic en Siguiente.
6 Si aparece una pantalla avisando de que los protocolos se desinstalarn, haga clic en S para continuar.
7 En la pantalla Protocols Choices, compruebe que Modbus est seleccionado y haga clic en Siguiente.
8 En la pantalla Select Components, no realice ninguna seleccin y haga clic en Siguiente.
9 En la pantalla Choose Destination Location, acepte la ruta predeterminada o utilice el botn Examinar
para seleccionar una nueva y, a continuacin, haga clic en Siguiente.
10 En la pantalla Start Copying Files, revise sus selecciones y haga clic en:
Atrs para volver a las pantallas anteriores y realizar cambios
Siguiente para continuar hasta la pantalla final.
11 En la pantalla Finish, haga clic en Finalizar. Ahora ya est instalado el software de programacin XBT
L1000 de Magelis.
Uso
330 1639505 06/2009
Descargar archivos de la aplicacin de software de 1 a varios
Descripcin general
Debe descargar el archivo de la aplicacin de software que requiera su instalacin
del HMI XBTN410 de Magelis
desde el sitio web www.schneider-electric.com.
En el sitio web de schneider-electric podr obtener de forma gratuita el archivo de
la aplicacin de software LTM_1T8_(idioma)_(versin).dop.
Para obtener instrucciones acerca de cmo instalar el software de programacin
XBT L1000 de Magelis, consulte Instalar el software de programacin XBT L1000
de Magelis, pgina 329.
Para obtener instrucciones acerca de cmo transferir archivos de aplicacin desde
el software de programacin XBT L1000 de Magelis del PC al HMI XBTN410 de
Magelis, consulte Transferir los archivos de software de la aplicacin al HMI
XBTN410 de Magelis, pgina 331.
Uso
1639505 06/2009 331
Transferir los archivos de software de la aplicacin al HMI XBTN410 de Magelis
Descripcin general
Una vez que haya instalado el software de programacin XBT L1000 de Magelis
en el PC y que haya descargado el archivo de software de la aplicacin de 1 a varios
necesario, estar preparado para transferir dicho archivo al HMI XBTN410 de
Magelis.
Para obtener instrucciones acerca de cmo descargar archivos de aplicacin de
software, consulte Descargar archivos de la aplicacin de software de 1 a varios,
pgina 330.
Pasos de la transferencia
Para transferir un archivo de aplicacin de software desde el software de
programacin XBT L1000 de Magelis del PC al HMI XBTN410 de Magelis:
Paso Accin
1 Conecte la alimentacin del HMI XBTN410 de Magelis.
2 Conecte el puerto Com1 de 9 pines del PC al puerto de datos de 25 pines del HMI mediante un cable de
programacin XBT Z915. La pantalla LCD del HMI indica:
"FIRMWARE VX.X WAITING FOR TRANSFER"
3 Inicie el software de programacin XBT_L1000 de Magelis.
4 Cierre todas las ventanas secundarias del software de programacin.
5 En el men File, seleccione Abrir. Se muestra el cuadro de dilogo Abrir.
6 En el cuadro de dilogo Abrir, vaya hasta el archivo de la aplicacin de software de 1 a varios (con la
extensin .dop) y haga clic en Abrir. El software de programacin muestra el archivo seleccionado.
7 En el men Transfers, seleccione Exportar.
8 Cuando reciba la notificacin de que el comando Exportar eliminar la aplicacin existente, haga clic en
OK para continuar la exportacin. La pantalla LCD del HMI indica:
"DOWNLOAD IN PROGRESS" y, a continuacin, "DOWNLOAD COMPLETED".
9 Cuando el software de programacin informe de que la transferencia se ha realizado correctamente,
haga clic en OK.
Uso
332 1639505 06/2009
7.4
Uso del HMI XBTN410 de Magelis
(1 a varios)
Descripcin general
En esta seccin se muestra cmo utilizar el HMI XBTN410 de Magelis
para
manejar hasta 8 controladores LTM R en una configuracin fsica de 1 HMI a varios
controladores LTM R (1 a varios).
Las configuraciones fsicas de 1 a varios presentan una nica:
interfaz de usuario (pantalla LCD y teclado)
estructura de mens
NOTA: El HMI XBTN410 de Magelis puede manejar hasta 8 controladores LTM R
cuya puesta en marcha se haya realizado previamente. Para poner en marcha un
solo controlador LTM R, utilice:
una unidad de operador de control LTM CU, o
el software PowerSuite
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Descripcin fsica (1 a varios) 333
Lneas de comandos (1 a varios) 337
Desplazarse por la estructura de mens (1 a varios) 339
Editar valores (1 a varios) 341
Ejecutar un comando de escritura de valores (1 a varios) 345
Estructura de mens (1 a varios) 347
Estructura de mens: Pgina Inicio (1 a varios) 348
Estructura de mens: Todos los controladores LTM R y el HMI (1 a varios) 349
Pgina Controlador (1 a varios) 353
Ajustes (1 a varios) 355
Histricos (1 a varios) 363
ID De Producto (1 a varios) 366
Supervisin (1 a varios) 367
Gestin de fallos (1 a varios) 369
Comandos de servicio (1 a varios) 371
Uso
1639505 06/2009 333
Descripcin fsica (1 a varios)
Interfaz de 1 a varios
Cuando se utiliza un XBTN410 de Magelis
en una configuracin fsica de uno a
varios, la parte frontal del HMI tiene este aspecto:
1 Pantalla LCD
2 Teclado de 8 botones
Teclado de 1 a varios
En una configuracin de 1 a varios se necesita una etiqueta de teclado
personalizada. Mediante una etiqueta de teclado en blanco, aada los nombres de
los 6 botones inferiores a la etiqueta. Para obtener instrucciones acerca de cmo
crear e instalar una etiqueta de teclado personalizada, consulte el manual de
instrucciones XBT-N que incluye el HMI XBTN410 de Magelis.
En una configuracin de 1 a varios, los botones del teclado realizan las siguientes
funciones:
Teclas Utilice esta tecla para
Entrar en la estructura de mens de un controlador LTM R seleccionado en la direccin 1-4.
Desplazarse al carcter izquierdo contiguo en un valor de configuracin numrico.
Ejecutar comandos de rearme a distancia para un controlador LTM R seleccionado en la direccin 1-4.
Restablecer los histricos a los ajustes predeterminados de fbrica para un controlador LTM R
seleccionado.
Mostrar la descripcin de otro fallo, cuando la pantalla LCD muestra mensajes de fallo.
Entrar en la estructura de mens de un controlador LTM R seleccionado en la direccin 5-8.
Desplazarse a un nivel inferior en la estructura de mens del controlador LTM R.
Desplazarse al carcter derecho contiguo en un valor de configuracin numrico.
Conmutar entre valores alternativos en una configuracin booleana.
Ejecutar comandos de rearme a distancia para un controlador LTM R seleccionado en la direccin 5-8.
Restablecer la configuracin a los ajustes predeterminados de fbrica para un controlador LTM R.
Mostrar la descripcin de otro fallo, cuando la pantalla LCD muestra mensajes de fallo.
Uso
334 1639505 06/2009
Pantalla LCD de 1 a varios
En una configuracin de 1 a varios, el HMI XBTN410 de Magelis
presenta una
pantalla LCD flexible que puede mostrar hasta 4 filas de 20 caracteres, como se
ilustra a continuacin:
En algunos casos, la pantalla LCD slo muestra 3 lneas de texto, dado que una
lnea (que contiene un mensaje de fallo o un encabezado de pgina) tiene el doble
de altura que el texto normal.
Desplazarse hacia abajo por una pgina.
Reducir en 1 el valor del dgito o ajuste seleccionado.
Desplazarse hacia arriba por una pgina.
Aumentar en 1 el valor del dgito o ajuste seleccionado.
Seleccionar un valor numrico para editar.
Nota: Una vez seleccionado un valor, puede aumentar o disminuir:
el valor entero
- o -
un dgito seleccionado del valor
Salir del nivel actual en la estructura de mens del HMI y subir al siguiente nivel.
Salir del valor seleccionado sin guardar los cambios.
Guardar los cambios y salir del valor seleccionado.
Eliminar el valor del ajuste seleccionado.
Nota: Tras eliminar un valor de ajuste, puede:
utilizar las teclas de flecha para introducir un nuevo valor y hacer clic en para guardarlo
- o -
hacer clic en para restaurar el valor eliminado
Teclas Utilice esta tecla para
MOD
ESC
ENTER
DEL
ENTER
ESC
Uso
1639505 06/2009 335
Pginas
La pantalla LCD muestra pginas de texto. Existen dos tipos de pginas:
Con frecuencia, las pginas contienen ms de 4 lneas de texto. Consulte
Desplazarse por la estructura de mens (1 a varios), pgina 339 para obtener
instrucciones acerca de cmo desplazarse por una pgina y entre las pginas.
Tipo de pgina Contiene Se muestra
Pgina de estructura de
mens
Encabezado de pgina que tiene el
doble de altura que el texto normal de la
pantalla LCD
Enlaces a otras pginas
Valores de parmetros de slo lectura
Parmetros editables
Comandos de funcin
Al desplazarse por la estructura de mens
del HMI hasta la pgina especfica
Pgina de mensajes de
fallo
Un mensaje de fallo intermitente
El nmero de fallos activos
De forma automtica cuando se produce
un fallo
Cuando se selecciona Fallos en la pgina
Inicio
Uso
336 1639505 06/2009
Ejemplos de pginas
La pgina Inicio:
Pginas de mensajes de fallo:
Las 4 lneas superiores de la pgina Inicio
Utilice el botn para desplazarse hacia abajo y mostrar
ms informacin de esta pgina.
Nota: Haga clic en un intermitente para ir a esa pgina.
La pgina de apertura del mensaje de fallo.
Nota: El nombre del fallo "SOBRECARGA TRMICA" y la
direccin del controlador LTM R "Controlador 1" parpadean
cuando se muestran.
Haga clic en el botn para mostrar ms pginas de
mensajes de fallos.
Haga clic en el botn para desplazarse hacia abajo y
mostrar ms mensajes de fallos de corriente de tierra.
Uso
1639505 06/2009 337
Lneas de comandos (1 a varios)
Descripcin general
Utilice las teclas y del teclado de HMI para ejecutar comandos de lnea
de texto. Una lnea de comandos se identifica por los siguientes smbolos:
, en el extremo derecho de la lnea de texto, o
, en el extremo izquierdo de la lnea de texto
Un comando slo se puede ejecutar cuando sobre su lnea de texto recae el
enfoque. Una lnea de texto tiene enfoque cuando o en cualquier extremo
de la lnea de texto, ms cualquier otro carcter de comando, parpadea.
Uso
338 1639505 06/2009
Lneas de comando
La estructura de mens de 1 a varios presenta 4 clases diferentes de lneas de
comandos, segn el carcter de comando, si lo hay, situado junto a la flecha de
lnea de comandos. Se indica a continuacin:
Caracteres de lnea de
comandos
Descripcin
Izquierda Derecha
Establece un enlace a una pgina.
Si no hay ningn carcter junto a la flecha que parpadea, haga clic en el botn del
teclado:
para desplazarse a la siguiente pgina que indica la flecha izquierda.
para desplazarse a la siguiente pgina que indica la flecha derecha.
N/A
0
- o -
1
Comandos de conmutacin de bit.
Si hay un 0 o un 1 junto a la flecha que parpadea, haga clic en el botn del teclado
para conmutar al valor de configuracin booleano.
v v
Comandos de escritura de valores.
Si hay una v junto a la flecha que parpadea, haga clic en el botn del teclado:
para ejecutar el comando que indica la flecha izquierda.
para ejecutar el comando que indica la flecha derecha.
Por ejemplo:
Reiniciar a Predet: Histricos
Reiniciar a Predet: Ajustes
Comprob Auto
? ?
El comando no se puede ejecutar. No hay conexin entre el HMI y el controlador
LTM R indicado.
Uso
1639505 06/2009 339
Desplazarse por la estructura de mens (1 a varios)
Descripcin general
Utilice los botones , , , y del teclado de HMI para:
desplazarse por una pgina
dirigirse a una pgina del siguiente nivel inferior en la estructura de mens
volver a una pgina del siguiente nivel superior en la estructura de mens
ir directamente a la pgina Inicio
ESC
Uso
340 1639505 06/2009
Ejemplo
El siguiente ejemplo de desplazamiento comienza y termina en la pgina Inicio:
Uso
1639505 06/2009 341
Editar valores (1 a varios)
Descripcin general
Utilice los botones , , , , y del teclado de HMI para
editar valores de configuracin. Existen tres clases de valores editables:
booleanos
numricos
lista de valores
Slo es posible editar los valores que se muestran en la pantalla LCD. Para mostrar
un valor, vaya hasta la pgina que contiene el valor. Una vez abierta la pgina
correcta, es posible que tenga que desplazarse hacia abajo para mostrar el valor.
Valores booleanos
Un valor booleano incluye un 0 o un 1 junto a en el extremo derecho de la lnea
de texto. En el siguiente ejemplo se muestra cmo seleccionar y editar un valor
booleano:
1 Se abre la pgina Ajustes con el enfoque en la lnea superior.
2 Haga clic en el botn ABAJO para desplazarse hacia abajo hasta el valor de control local
(HMI). El valor booleano (0) y la flecha de lnea de comandos parpadean, lo que indica el
enfoque.
3 Haga clic en la flecha DERECHA para conmutar el valor de control local a Bornero de
conex. y el valor booleano a 1.
NOTA: Se guarda un valor booleano editado con sus cambios de valor.
MOD ENTER
Uso
342 1639505 06/2009
Valores numricos
Los valores numricos se aumentan o disminuyen, y se pueden editar de 2 formas:
Se selecciona el valor entero y se aumenta o disminuye su valor.
Se seleccionan caracteres individuales del valor y se aumenta o disminuye el
valor de cada dgito.
Utilice el botn para seleccionar el valor que se va a editar, de la manera
siguiente:
1 Se abre la pgina Arranq Largo sin valores seleccionados para editar.
2 Haga clic en el botn MOD una vez para seleccionar el primer campo numrico que se
muestra para editar.
3 Haga clic en el botn MOD una segunda vez para seleccionar el siguiente campo
numrico que se muestra para editar.
MOD
Uso
1639505 06/2009 343
Una vez seleccionado un valor para editar, puede utilizar los botones y
para aumentar o disminuir su valor entero y, a continuacin, utilice el botn
para guardar la edicin:
De forma alternativa, despus de resaltar un valor, puede utilizar los botones y
para seleccionar un slo carcter en un campo y editarlo de la manera siguiente:
ENTER
Uso
344 1639505 06/2009
Valores de lista de valores
En algunos casos, un valor presenta una lista de selecciones de valores. La
seleccin de un valor de la lista es muy similar a aumentar o disminuir el valor entero
de un valor numrico, como se muestra a continuacin:
Uso
1639505 06/2009 345
Ejecutar un comando de escritura de valores (1 a varios)
Descripcin general
El HMI XBTN410 de Magelis
, en una configuracin de 1 a varios, proporciona
comandos de escritura de valores ejecutables. Un comando de escritura de valores
ejecuta inmediatamente una tarea. La lnea de comandos de escritura de valores se
identifica por:
una v (en el extremo izquierdo de una lnea de comandos), o
una v (en el extremo derecho de una lnea de comandos)
Si un comando de escritura de valores no se ejecuta correctamente, en la pantalla
HMI se muestra un mensaje de error.
Los comandos de escritura de valores incluyen:
Comando de escritura de
valores
Tarea Ubicacin
Borrar configuracin Borra la configuracin y restaura los ajustes
predeterminados.
Pgina Reiniciar a Predet
Borrar histricos Borra los histricos y restaura los ajustes
predeterminados.
Comprob Auto Realiza una comprobacin automtica. Pgina Controlador
Rearme - Manual Permite la puesta a cero manual de los fallos. Pgina Reiniciar
Rearme - A distancia Permite la puesta a cero a distancia de los fallos.
Rearme - Automtico Permite la puesta a cero automtica de los fallos.
Uso
346 1639505 06/2009
Ejemplo
Utilice las teclas de flecha o para ejecutar un comando de escritura de
valores. Cuando se ejecuta un comando de este tipo, la letra "v" minscula situada
junto a la flecha se convierte en una letra "V" mayscula, como se muestra a
continuacin, para volver rpidamente a una letra "v" minscula una vez que se
ejecuta el comando:
Uso
1639505 06/2009 347
Estructura de mens (1 a varios)
Descripcin general
La estructura de mens de 1 a varios del HMI XBTN410 de Magelis
tiene un diseo
jerrquico y consta de 6 niveles de pginas individuales. Los niveles superiores de
la estructura de mens proporcionan informacin y comandos para el propio HMI y
para todos los controladores LTM R conectados al HMI. Los niveles inferiores de la
estructura de mens proporcionan ajustes, histricos y comandos para un
controlador LTM R seleccionado.
Resumen de la estructura de mens
La estructura de mens de 1 a varios del HMI XBTN410 de Magelis presenta el
siguiente resumen de niveles y pginas:
Nivel Pginas Descripcin
1 Pgina Inicio La pgina de inicio, de la que parte la navegacin a las dems pginas. Se abre
de forma predeterminada al inicio cuando no existen fallos.
2 Pgina Corr Controlador Muestra la corriente media de cada controlador LTM R como un porcentaje
de FLC.
Proporciona un enlace a la estructura de mens de cada controlador LTM R.
Pgina Estado
Controlador
Muestra el estado de funcionamiento (Marcha, Parado, Fallo) de cada
controlador LTM R.
Proporciona un enlace a la estructura de mens de cada controlador LTM R.
Pginas Fallo Muestran una serie de pginas, y en cada una se describe un fallo activo. Se
abren automticamente cuando se produce un fallo.
Pgina Reini a Dist Comandos ejecutables para el rearme a distancia de cada controlador LTM R.
Pgina Reiniciar a Predet Comandos ejecutables para restablecer histricos o parmetros de cada
controlador LTM R.
Pgina Referencia XBTN Describe la configuracin de comunicaciones, el archivo de programa de la
aplicacin, la versin del software de programacin y la versin del firmware
HMI.
3 Pgina Controlador Para un controlador LTM R seleccionado:
Muestra los valores de los parmetros de cambio dinmico.
Comprobacin automtica-comando.
Proporciona un enlace a sus parmetros, histricos e informacin de ID de
producto.
4, 5, 6 Pginas y subpginas
Ajustes
Contienen parmetros configurables para un controlador LTM R seleccionado.
Pginas y subpginas
Histricos
Presentan los histricos para un controlador LTM R seleccionado, como los
historiales de fallo n-0 y n-1.
Pgina ID De Producto Identificacin del firmware y el nmero de pieza del controlador LTM R y el
mdulo de expansin LTM E.
Uso
348 1639505 06/2009
Estructura de mens: Pgina Inicio (1 a varios)
Descripcin general
La pgina Inicio se abre de forma predeterminada al inicio del HMI, cuando el
XBTN410 de Magelis
est conectado a 1 o varios controladores LTM R, y todos
ellos funcionan sin fallos ni advertencias.
La pgina Inicio es la nica pgina situada en el nivel 1 de la estructura de mens
de 1 a varios del XBTN410 de Magelis. Es el punto de partida para la exploracin
de otros niveles y pginas de la estructura de mens.
Pgina Inicio
La pgina Inicio contiene los siguientes elementos de men:
Elemento de men Descripcin
VX.X
Encabezado de pgina con la versin de firmware del controlador LTM R.
IMPORTANTE Establece un enlace a una pgina con el siguiente mensaje de AVISO:
"Establezca el ajuste endian de puerto HMI en LEndian para garantizar
que todos los valores se muestran correctamente".
Corr Controlador Establece un enlace a una pgina en la que se muestra la corriente media
y se proporcionan enlaces a datos y comandos para cada controlador
LTM R.
Estado Controlador Establece un enlace a una pgina en la que se muestra el estado (Marcha,
Parado, Fallo) y se proporcionan enlaces a datos y comandos para cada
controlador LTM R.
Fallos Muestra una serie de mensajes de fallo.
Reini a Dist Establece un enlace a una pgina en la que se muestra el estado de cada
controlador LTM R, y se proporciona un comando de rearme para cada
controlador LTM R.
Reiniciar a Predet Establece un enlace a una pgina con comandos que restablecen los
histricos o los parmetros de cada controlador LTM R a los ajustes
predeterminados de fbrica.
Referencia XBTN Establece un enlace a una pgina en la que se describe la velocidad y
paridad de la comunicacin, el software de programacin y el firmware del
controlador LTM R.
Uso
1639505 06/2009 349
Estructura de mens: Todos los controladores LTM R y el HMI (1 a varios)
Descripcin general
Las pginas situadas en el nivel 2 de la estructura de mens contienen:
informacin y comandos para hasta 8 controladores LTM R conectados
informacin de fallos para todos los controladores LTM R, o
informacin acerca del HMI XBTN410 de Magelis
Todas las pginas de la estructura de mens de nivel 2 son accesibles desde la
pgina Inicio.
Pgina Corr Controlador
Utilice la pgina Corr Controlador para supervisar la relacin de corriente media de
todos los controladores LTM R conectados, y para desplazarse a otras pginas
como se describe a continuacin:
Nivel 2 Descripcin
Corr Controlador
I1 = XXXX% I5 = XXXX%
Abre la pgina Controlador para el controlador LTM R
seleccionado (1-8).
I2 = XXXX% I6 = XXXX%
I3 = XXXX% I7 = XXXX%
I4= XXXX% I8 = XXXX%
Estado Controlador Abre la pgina Estado Controlador.
Reini a Dist Abre la pgina Reini a Dist.
Inicio Vuelve a la pgina Inicio.
Uso
350 1639505 06/2009
Pgina Estado Controlador
Utilice la pgina Estado Controlador para supervisar los estados Sistema-activado
y Sistema-fallo de todos los controladores LTM R conectados, y para desplazarse
a otras pginas como se describe a continuacin:
Visualizacin de fallos
El HMI XBTN410 de Magelis
muestra los fallos activos en una serie de pginas (1
fallo por pgina) en las siguientes situaciones:
Se produce un fallo, y se abre automticamente la pantalla de fallos activos.
Selecciona Fallos en la pgina Inicio, y se abre automticamente la pantalla de
fallos activos.
Para obtener informacin acerca de la gestin de fallos, incluidas las pginas de
visualizacin de fallos, consulte Gestin de fallos (1 a varios), pgina 369.
Nivel 2 Descripcin
Estado Controlador
1: Off 5: OffFLT Abre la pgina Controlador para el controlador seleccionado (1-8).
2: Off 6: On
3: On FLT 7: Off
4: Off 8: Off
Corr Controlador Abre la pgina Corr Controlador.
Reini a Dist Abre la pgina Reini a Dist.
Inicio Vuelve a la pgina Inicio.
Uso
1639505 06/2009 351
Pgina Reini a Dist
Utilice la pgina Reini a Dist para ejecutar de forma remota Fallo-comando de
reinicio para un controlador LTM R con fallos (controladores con el parmetro Fallo-
modo de reinicio establecido en A distancia), y para desplazarse a otras pginas:
En cada una de las primeras 4 lneas de esta pgina se proporciona informacin de
rearme tras fallo en las ubicaciones indicadas:
1 Bit de rearme tras fallo (no es significativo)
2 Nmero de controlador LTM R (1-8)
3 Estado de fallo (MARCHA, PARADO, FALL.)
4 Tiempo hasta rearme (segundos)
Nivel 2 Descripcin
Reini a Dist
01FLT023 067FLT50
Ejecuta Fallo-comando de reinicio para el controlador LTM R
seleccionado (1-8) si el rearme tras fallo a distancia est
activado para ese controlador.
02FLT034 078FLT60
03FLT045 089FLT70
04FLT056 090FLT80
Corr Controlador Abre la pgina Corr Controlador.
Estado Controlador Abre la pgina Estado Controlador.
Inicio Vuelve a la pgina Inicio.
Uso
352 1639505 06/2009
Pgina Reiniciar a Predet
La pgina Reiniciar a Predet proporciona los comandos Borrar histricos-comando
y Borrar configuracin del controlador-comando para cada controlador LTM R,
como se muestra a continuacin:
Pgina Referencia XBTN
La pgina Referencia XBTN proporciona informacin acerca del HMI. A
continuacin se muestra un ejemplo de la informacin que aparece en esta pgina:
Nivel 2 Descripcin
Reiniciar a Predet
Est 1 Ajustes
Borra los histricos (flechas izquierdas) o los parmetros de
configuracin (flechas derechas) del controlador LTM R
seleccionado (1-8), y restaura los ajustes predeterminados de
fbrica.
Est 2 Ajustes
Est 3 Ajustes
Est 4 Ajustes
Est 5 Ajustes
Est 6 Ajustes
Est 7 Ajustes
Est 8 Ajustes
Nivel 2 Nombre de parmetro / descripcin
Referencia XBTN
Veloc MB = 19200 HMI-ajuste de velocidad de transmisin en baudios del puerto
Paridad MB = Par HMI-ajuste de paridad de puerto
LTM_1T8_E_Vx.xx.DOP Nombre de archivo del programa de aplicacin HMI
XX/XX/200X xx:xx:xx Fecha del archivo de programa de la aplicacin HMI
XBT-L1000 = V 4.42 Versin del software XBT 1000
Firmware = V 3.1 Versin del firmware HMI
Uso
1639505 06/2009 353
Pgina Controlador (1 a varios)
Descripcin general
La pgina Controlador presenta informacin y comandos del controlador LTM R
que se seleccion en la pgina Corr Controlador o la pgina Estado Controlador
(consulte Pgina Corr Controlador, pgina 349).
La pgina Controlador es la nica pgina situada en el nivel 3 de la estructura de
mens.
Utilice esta pgina para:
supervisar los cambios dinmicos en los valores de corriente, tensin y potencia
de un controlador LTM R seleccionado
desplazarse hasta los parmetros editables de un controlador LTM R
desplazarse hasta los histricos de slo lectura y la informacin de producto de
un controlador LTM R
ejecutar el comando de comprobacin automtica para un controlador LTM R
Uso
354 1639505 06/2009
Pgina Controlador
La pgina Controlador muestra los valores de los parmetros de cambio dinmico,
y contiene las siguientes lneas de comando:
Nivel 3 Nombre de parmetro / descripcin
Encabezado de pgina que indica la direccin (1-8) del controlador LTM R
Corr Media = xxxx% FLC Corriente media-relacin
Corriente L1 = xxxx% FLC Corriente L1-relacin
Corriente L2 = xxxx% FLC Corriente L2-relacin
Corriente L3 = xxxx% FLC Corriente L3-relacin
Corr Tierra = xxxx,x% FLCmn Corriente de tierra-relacin
DesFCorr = xxx% Des Corriente-desequilibrio de fases
CapacidadTh = xxxxx% Nivel de capacidad trmica
Tiempo hasta el disparo = xxxx s Tiempo hasta el disparo
Volt media = xxxx% FLCmn Tensin media
VoltiosL1-L2 = xxxxx V Tensin L1-L2
VoltiosL2-L3 = xxxxx V Tensin L2-L3
VoltiosL3-L1 = xxxxx V Tensin L3-L1
DesFVolt = xxx% Des Tensin-desequilibrio de fases
Factor de potencia = xx,xx Factor de potencia
Pot activa = xxxx,x kW Potencia activa
Pot reactiva = xxxx,x kVAR Potencia reactiva
Sens Temp = xxxx,x Motor-sensor de temperatura
Ajustes Enlaces a parmetros editables del controlador LTM R.
Histricos Enlaces a histricos de slo lectura del controlador LTM R.
Comprob Auto v Ejecuta el comando de comprobacin automtica. Consulte Comprobacin
automtica con el motor encendido, pgina 570.
ID De Producto Establece un enlace a los nmeros de referencia de producto y las
versiones de firmware del controlador LTM R y el mdulo de expansin.
Inicio Vuelve a la pgina Inicio.
Uso
1639505 06/2009 355
Ajustes (1 a varios)
Descripcin general
El HMI XBTN410 de Magelis
proporciona varias pginas de parmetros editables,
agrupadas en los niveles 4, 5 y 6 de la estructura de mens. La pgina Ajustes es
el punto de partida para buscar y editar parmetros, por ejemplo:
motor
control local
modo de transferencia
rearme (fallo)
corriente
tensin
potencia
descarga
bloqueos de ciclo rpido
prdida de comunicacin
La pgina Ajustes se encuentra en el nivel 4 de la estructura de mens. Para
desplazarse a esta pgina, utilice una de las siguientes rutas:
Nivel Desde esta pgina... Seleccione...
1 Pgina Inicio Corr Controlador o Estado Controlador
2 Pgina Corr Controlador o pgina Estado
Controlador
Nmero de controlador LTM R
3 Pgina Controlador Ajustes
Uso
356 1639505 06/2009
Parmetros de motor, control y transferencia
Utilice la pgina Ajustes para desplazarse hasta los parmetros de motor, control
local y modo de transferencia y editarlos:
Nivel 4 Nivel 5 Nombre del parmetro
Direc. parmetros 1-8
Motor Voltaje Nom Motor-tensin nominal
Potencia nom. (kW) Motor-potencia nominal (expresada en kW)
Potencia nom. (Cv) Motor-potencia nominal (expresada en Cv)
TransDir Control de transicin directa
TpoTrans Motor-tiempo sobrepasado de transicin
Nivel2Pasos Motor-umbral de paso 1 a 2
Tpo2Pasos motor-tiempo sobrepasado de paso 1 a 2
Vent Aux Motor-refrigeracin por ventilador auxiliar
SENSOR TEMP.
Fallo Motor-activacin de fallo de sensor de temperatura
Nivel de fallo Motor-umbral de fallo de sensor de temperatura
Adv Motor-activacin de advertencia de sensor de temperatura
Nivel alerta Motor-umbral de advertencia de sensor de temperatura
Control local Control de ajuste de canal local
Modo de transferencia Modo de transferencia de control
Uso
1639505 06/2009 357
Parmetros de rearme tras fallo
Utilice la pgina Ajustes para desplazarse hasta los siguientes parmetros de
rearme tras fallo y editarlos:
Nivel 4 Nivel 5 Nombre del parmetro
Direc. parmetros 1-8
Rearme Manual Fallo-modo de reinicio
A distancia
Automtico
Puerto red Puerto de red-ajuste endian
REARME AUTO GRUPO 1
Intentos Rearme automtico-ajuste intentos grupo 1
Tiempo Rein Rearme automtico-tiempo sobrepasado grupo 1
REARME AUTO GRUPO 2
Intentos Rearme automtico-ajuste intentos grupo 2
Tiempo Rein Rearme automtico-tiempo sobrepasado grupo 2
REARME AUTO GRUPO 3
Intentos Rearme automtico-ajuste intentos grupo 3
Tiempo Rein Rearme automtico-tiempo sobrepasado grupo 3
Uso
358 1639505 06/2009
Parmetros de corriente
Desde la pgina Ajustes, puede desplazarse hasta los siguientes parmetros de
corriente y editarlos:
Nivel 4 Nivel 5 Nivel 6 Nombre del parmetro
Direc.
parmetros 1-8
Corriente Sobrecarga term. Fallo Sobrecarga trmica-activacin de fallo
FLC1-OC1 Motor-relacin de corriente a plena carga
FLC2-OC2 Motor-relacin de corriente a plena carga y alta
velocidad
Clase de disparo Motor-clase de disparo
Nivel de rearme sobrecarga trmica-umbral de reinicio tras fallo
Hora O Def Sobrecarga trmica-tiempo sobrepasado definitivo
de fallo (Hora O)
Hora D Def Arranque prolongado-tiempo sobrepasado de fallo
(Hora D)
Adv Sobrecarga trmica-activacin de advertencia
Nivel alerta Sobrecarga trmica-umbral de advertencia
Des/Perd/Rev Fase DES FASE CORR
Fallo Corriente-activacin de fallo de desequilibrio de
fases
Nivel de fallo Corriente-umbral de fallo de desequilibrio de fases
InicTpoFal Corriente-tiempo sobrepasado de fallo de
desequilibrio de fases en arranque
FuncTpoFal Corriente-tiempo sobrepasado de fallo de
desequilibrio de fases en marcha
Adv Corriente-activacin de advertencia de
desequilibrio de fases
Nivel alerta Corriente-umbral de advertencia de desequilibrio
de fases
PRDIDA FA. CORR.
Fallo Corriente-activacin de fallo de prdida de fase
Tiempo de fallo Corriente-tiempo sobrepasado de prdida de fase
Adv Corriente-activacin de advertencia de prdida de
fase
INV. FA. CORR.
Fallo Corriente-activacin de fallo de inversin de fases
Uso
1639505 06/2009 359
Corriente
(continuacin)
Arranque
prolongado
Fallo Arranque prolongado-activacin de fallo
Nivel de fallo Arranque prolongado-umbral de fallo
Tiempo de fallo Arranque prolongado-tiempo sobrepasado de fallo
Agarrotamiento Fallo Agarrotamiento-activacin de fallo
Nivel de fallo Agarrotamiento-umbral de fallo
Tiempo de fallo Agarrotamiento-tiempo sobrepasado de fallo
Adv Agarrotamiento-activacin de advertencia
Nivel alerta Agarrotamiento-umbral de advertencia
Bajo/Sobre Corr BAJO CORR
Fallo Fallo de infracorriente-activacin
Nivel de fallo Fallo de infracorriente-umbral
Tiempo de fallo Infracorriente-tiempo sobrepasado de fallo
Adv Infracorriente-advertencia activacin
Nivel alerta Infracorriente-umbral de advertencia
SOBRE CORR
Fallo Sobreintensidad-activacin de fallo
Nivel de fallo Sobrecorriente-umbral de fallo
Tiempo de fallo Sobrecorriente-tiempo sobrepasado de fallo
Adv Sobrecorriente-activacin de advertencia
Nivel alerta Sobrecorriente-umbral de advertencia
Corriente de tierra Fallo Corriente de tierra-modo
UmFaInt Corriente de tierra interna-umbral de fallo
TiempoFaInt Corriente de tierra interna-tiempo sobrepasado de
fallo
UmFaExt Corriente de tierra externa-umbral de fallo
TiempoFaExt Corriente de tierra externa-tiempo sobrepasado de
fallo
Adv Corriente de tierra-activacin de advertencia
UmAdvInt Corriente de tierra interna-umbral de advertencia
UmAdvExt Corriente de tierra externa-umbral de advertencia
Nivel 4 Nivel 5 Nivel 6 Nombre del parmetro
Direc.
parmetros 1-8
Uso
360 1639505 06/2009
Parmetros de tensin
Desde la pgina Ajustes, puede desplazarse hasta los siguientes parmetros de
tensin y editarlos:
Nivel 4 Nivel 5 Nivel 6 Nombre del parmetro
Direc. parmetros 1-8
Tensin Des/Perd/Rev Fase DES FASE VOLT
Fallo Tensin-activacin de fallo de desequilibrio de
fases
Nivel de fallo Tensin-umbral de fallo de desequilibrio de fases
InicTpoFal Tensin-tiempo sobrepasado de fallo de
desequilibrio de fases en arranque
FuncTpoFal Tensin-tiempo sobrepasado de fallo de
desequilibrio de fases en marcha
Adv Tensin-activacin de advertencia de desequilibrio
de fases
Nivel alerta Tensin-umbral de advertencia de desequilibrio de
fases
PRDIDA FA. TEN.
Fallo Tensin-activacin de fallo de prdida de fase
Tiempo de fallo Tensin-tiempo sobrepasado de fallo de prdida
de fase
Adv Tensin-activacin de advertencia de prdida de
fase
INV. FA. TEN.
Fallo Tensin-activacin de fallo de inversin de fase
Bajo/Sobre Voltaje BAJO VOLT
Fallo Infratensin-activacin de fallo
Nivel de fallo Infratensin-umbral de fallo
Tiempo de fallo Infratensin-tiempo sobrepasado de fallo
Adv Infratensin-activacin de advertencia
Nivel alerta Infratensin-umbral de advertencia
SOBRE VOLT
Fallo Sobretensin-activacin de fallo
Nivel de fallo Sobretensin-umbral de fallo
Tiempo de fallo Sobretensin-tiempo sobrepasado de fallo
Adv Sobretensin-activacin de advertencia
Nivel alerta Sobretensin-umbral de advertencia
Uso
1639505 06/2009 361
Parmetros de potencia
Desde la pgina Ajustes, puede desplazarse hasta los siguientes parmetros de
potencia y editarlos:
Nivel 4 Nivel 5 Nivel 6 Nombre del parmetro
Direc. parmetros 1-8
Potencia Bajo/Sobre Potencia BAJO POTENCIA
Fallo Potencia insuficiente-activacin de fallo
Nivel de fallo Potencia insuficiente-umbral de fallo
Tiempo de fallo Potencia insuficiente-tiempo sobrepasado de fallo
en arranque
Adv Potencia insuficiente-activacin de advertencia
Nivel alerta Potencia insuficiente-umbral de advertencia
SOBRE POTENCIA
Fallo Potencia excesiva-activacin de fallo
Nivel de fallo Potencia excesiva-umbral de fallo
Tiempo de fallo Potencia excesiva-tiempo sobrepasado de fallo
Adv Potencia excesiva-activacin de advertencia
Nivel alerta Potencia excesiva-activacin de fallo
Bajo/Sobre PF BAJO PF
Fallo Factor de potencia insuficiente-activacin de fallo
Nivel de fallo Factor de potencia insuficiente-umbral de fallo
Tiempo de fallo Factor de potencia insuficiente-tiempo
sobrepasado de fallo
Adv Factor de potencia insuficiente-activacin de
advertencia
Nivel alerta Factor de potencia insuficiente-umbral de
advertencia
SOBRE PF
Fallo Factor de potencia excesivo-activacin de fallo
Nivel de fallo Factor de potencia excesivo-umbral de fallo
Tiempo de fallo Factor de potencia excesivo-tiempo sobrepasado
de fallo
Adv Factor de potencia excesivo-activacin de
advertencia
Nivel alerta Factor de potencia excesivo-umbral de
advertencia
Uso
362 1639505 06/2009
Parmetros de descarga, diagnstico, bloqueo de ciclo rpido y puertos de comunicacin
Desde la pgina Ajustes, puede desplazarse hasta los siguientes parmetros de
descarga, diagnstico, bloqueo de ciclo rpido y puertos de comunicacin y
editarlos:
Nivel 4 Nivel 5 Nombre del parmetro
Direc. parmetros 1-8
Descarga Fallo Descarga
Nivel de fallo Umbral de cada de tensin
Tiempo de fallo Descarga-tiempo sobrepasado
UmbRearme Umbral de rearranque por cada de tensin
Tp rearranq Tiempo sobrepasado de rearranque por cada de tensin
Diagnstico FAL DIAGNOST
Fallo Diagnstico-activacin de fallo
Adv Diagnstico-activacin de advertencia
CABLEADO RETR CT
Fallo Cableado-activacin de fallo
Tiempo de bloqueo de ciclo rpido Ciclo rpido-tiempo sobrepasado de bloqueo
Puertos Com Puerto red Puerto de red-ajuste endian
Puerto HMI HMI-ajuste endian de puerto
PRDIDA COM. PUERTO RED
Fallo Puerto de red-activacin de fallo
Tiempo de fallo Puerto de red-tiempo sobrepasado de prdida de
comunicaciones
Adv Puerto de red-activacin de advertencia
PRDIDA COM. PUERTO HMI
Fallo HMI-activacin de fallo de puerto
Adv HMI-activacin de advertencia de puerto
Uso
1639505 06/2009 363
Histricos (1 a varios)
Descripcin general
El HMI XBTN410 de Magelis
proporciona pginas de histricos de slo lectura,
agrupadas en los niveles 4 y 5 de la estructura de mens, para un controlador
LTM R seleccionado.
Para desplazarse a esta pgina, utilice una de las siguientes rutas:
Histricos
Desde la pgina Ajustes, puede desplazarse hasta los siguientes histricos y
leerlos:
Nivel Desde esta pgina... Seleccione...
1 Pgina Inicio Corr Controlador o Estado Controlador
2 Pgina Corr Controlador o pgina Estado
Controlador
Nmero de controlador LTM R
3 Pgina Controlador Histricos
Nivel 4 Nivel 5 Nombre del parmetro
Dir. histricos 1-8
CntrlTempMax Controlador-temperatura interna mx.
Tpo Func Tiempo de funcionamiento
ArranqMot Motor-nmero de arranques
DurUltArranq Motor-duracin del ltimo arranque
UltArranq Motor-corriente del ltimo arranque
Todos Fallos Fallos-nmero
Fal SobrecTh Sobrecarga trmica-nmero de fallos
Ad SobrecTh Sobrecarga trmica-nmero de advertencias
Fal Des Corr Corriente-nmero de fallos de desequilibrio de fases
FalArranqLar Arranque prolongado-nmero de fallos
FalBajoCorr Infracorriente-nmero de fallos
Fal Tierra Corriente de tierra-nmero de fallos
FalDesFVolt Tensin-nmero de fallos de desequilibrio de fases
FalBajoVolt Infratensin-nmero de fallos
FalSobreVolt Sobretensin-nmero de fallos
Fal PerdHMI HMI-nmero de fallos de puerto
Fal Int Red Puerto de red-nmero de fallos internos
Uso
364 1639505 06/2009
Fal ConfRed Puerto de red-nmero de fallos de configuracin
Fal PtoRed Puerto de red-nmero de fallos
FalInt Cntrl Controlador-nmero de fallos internos
FalEntrePto Puerto interno-nmero de fallos
Fallo n-0 Cdigo de fallo Fallo-cdigo n-0
Fecha (MMDDAAAA) Fecha y hora-n-0
Hora (HHMMSS) Fecha y hora n-0
Tasa FLC Motor-relacin de corriente a plena carga n-0
FLC Mx Motor-corriente a plena carga mx n-0
Corr Media Corriente media n-0
Corriente L1 Corriente L1-relacin n-0
Corriente L2 Corriente L2-relacin n-0
Corriente L3 Corriente L3-relacin n-0
Corr Tierra Corriente de tierra-relacin n-0
DesFCorr Corriente-desequilibrio de fases n-0
CapacidadTh Nivel de capacidad trmica n-0
Voltios med Tensin media n-0
VoltiosL1-L2 Tensin L1- L2 n-0
VoltiosL2-L3 Tensin L2- L3 n-0
VoltiosL3-L1 Tensin L3- L1 n-0
DesFVolt Tensin-desequilibrio de fases n-0
Frecuencia Frecuencia n-0
Pot activa Potencia activa n-0
Factor de potencia Factor de potencia n-0
Sens Temp Motor-sensor de temperatura n-0
Nivel 4 Nivel 5 Nombre del parmetro
Dir. histricos 1-8
Uso
1639505 06/2009 365
Fallo n-1 Cdigo de fallo Fallo-cdigo n-1
Fecha (MMDDAAAA) Fecha y hora-n-1
Hora (HHMMSS) Fecha y hora n-1
Tasa FLC Motor-relacin de corriente a plena carga n-1
FLC Mx Motor-corriente a plena carga mx n-1
Corr Media Corriente media n-1
Corriente L1 Corriente L1-relacin n-1
Corriente L2 Corriente L2-relacin n-1
Corriente L3 Corriente L3-relacin n-1
Corr Tierra Corriente de tierra-relacin n-1
DesFCorr Corriente-desequilibrio de fases n-1
CapacidadTh Nivel de capacidad trmica n-1
Voltios med Tensin media n-1
VoltiosL1-L2 Tensin L1- L2 n-1
VoltiosL2-L3 Tensin L2- L3 n-1
VoltiosL3-L1 Tensin L3- L1 n-1
DesFVolt Tensin-desequilibrio de fases n-1
Frecuencia Frecuencia n-1
Pot activa Potencia activa n-1
Factor de potencia Factor de potencia n-1
Sens Temp Motor-sensor de temperatura n-1
Nivel 4 Nivel 5 Nombre del parmetro
Dir. histricos 1-8
Uso
366 1639505 06/2009
ID De Producto (1 a varios)
Descripcin general
El HMI XBTN410 de Magelis
proporciona una descripcin del nmero de producto
y del firmware del controlador LTM R y el mdulo de expansin LTM E.
Para desplazarse a la pgina ID De Producto, utilice una de las siguientes rutas:
ID De Producto
En la pgina ID De Producto, puede leer la siguiente informacin acerca del
controlador LTM R y el mdulo de expansin LTM E:
Nivel Desde esta pgina... Seleccione...
1 Pgina Inicio Corr Controlador o Estado Controlador
2 Pgina Corr Controlador o pgina Estado
Controlador
Nmero de controlador LTM R
3 Pgina Controlador ID De Producto
Nivel 4 Nombre de parmetro / descripcin
Direc. de ID de producto 1-8
Catlogo Controlador Ref Controlador-referencia comercial (nmero de producto)
Firmware del controlador Controlador-versin de firmware
Catalogo Mod Exp Ref Expansin-referencia comercial (nmero de producto)
Firmware Mod Exp Expansin-versin de firmware
Tipo de red Puerto de red-cdigo de identificacin
Firmware de red Puerto de red-versin de firmware
Uso
1639505 06/2009 367
Supervisin (1 a varios)
Descripcin general
Utilice el HMI XBTN410 de Magelis
, en una configuracin de 1 a varios, para
supervisar:
el estado de funcionamiento y la corriente media de varios controladores LTM R,
o
los parmetros de corriente, tensin y potencia de un controlador LTM R
seleccionado
Supervisin de varios controladores LTM R
Vaya a las siguientes pginas para supervisar de forma simultnea estos valores
de cambio dinmico para todos los controladores LTM R:
Para obtener ms informacin de las dos pginas, consulte Pgina Corr
Controlador, pgina 349.
Pgina Valor
Pgina Corr Controlador Corriente media-relacin
Pgina Estado Controlador Estado de funcionamiento (Marcha, Parado, Fallo)
Uso
368 1639505 06/2009
Supervisin de un solo controlador LTM R
Vaya hasta la pgina Controlador de un controlador LTM R seleccionado para
supervisar los valores de cambio dinmico de los siguientes parmetros:
Corriente:
Corriente media-relacin
Corriente L1-relacin
Corriente L2-relacin
Corriente L3-relacin
Corriente de tierra-relacin
Corriente-desequilibrio de fases
Capacidad trmica
Nivel de capacidad trmica
Tiempo hasta el disparo
Motor-sensor de temperatura
Tensin
Tensin media
Tensin L1-L2
Tensin L2-L3
Tensin L3-L1
Tensin-desequilibrio de fases
Potencia
Factor de potencia
Potencia activa
Potencia reactiva
Para obtener ms informacin acerca de la pgina Controlador, consulte Pgina
Controlador (1 a varios), pgina 353.
Uso
1639505 06/2009 369
Gestin de fallos (1 a varios)
Descripcin general
Cuando se produce un fallo, el HMI XBTN410 de Magelis
abre automticamente
una pantalla de fallos, que consta de 1 pgina por cada fallo activo. Cada pgina
contiene:
el nombre del fallo
la direccin del controlador LTM R que experimenta el fallo
el nmero total de fallos sin resolver
Pginas de visualizacin de fallos
Una pgina tpica de visualizacin de fallos se parecera a esta:
1 Nmero de pgina de visualizacin de fallos
2 Nmero total de fallos activos
3 Nombre predeterminado (intermitente)
4 Direccin del controlador LTM R que experimenta el fallo (intermitente)
Si hay ms de 1 fallo activo, utilice los botones del teclado y para
desplazarse hacia delante y hacia atrs por las pginas de visualizacin de fallos.
Dado que algunos mensajes de fallo contienen ms de 4 lneas de texto, puede que
tenga que utilizar los botones del teclado y para desplazarse hacia arriba
y hacia abajo de la pgina de visualizacin de fallos y mostrar el mensaje de fallo
completo.
Uso
370 1639505 06/2009
Apertura / cierre de la pantalla de fallos
El HMI de 1 a varios abre automticamente la pantalla de fallos cada vez que se
produce un fallo. Cuando se elimina la causa de un determinado fallo y se ejecuta
un comando de rearme tras fallo, ese fallo deja de aparecer en la pantalla de fallos.
Tambin puede cerrar la pantalla de fallos haciendo clic en el botn del teclado
. Esta accin no corrige la causa subyacente del fallo ni elimina ningn fallo. Si
desea volver a abrir la pantalla de fallos en cualquier momento, vaya hasta la pgina
Inicio, desplcese hasta la lnea de comandos Fallos y haga clic en el botn del
teclado .
Si abre la pantalla de fallos cuando no hay fallos activos, el HMI muestra el mensaje
"No Faults Present".
ESC
Uso
1639505 06/2009 371
Comandos de servicio (1 a varios)
Descripcin general
El XBTN410 de Magelis
en una configuracin de 1 a varios proporciona los
siguientes comandos de servicio:
Comando Descripcin Ubicacin / referencia
Comprob Auto Realiza una comprobacin interna
del controlador LTM R y el mdulo
de expansin LTM E.
Nivel 3, pgina Controlador. Consulte Pgina
Controlador, pgina 354 y Comprobacin
automtica con el motor encendido,
pgina 570.
Reiniciar a Predet: Histricos Ejecuta Borrar histricos-comando
para un controlador LTM R
seleccionado.
Nivel 2, pgina Reiniciar a Predet. Consulte
Pgina Reiniciar a Predet, pgina 352.
Reiniciar a Predet: Ajustes Ejecuta Borrar configuracin del
controlador-comando para un
controlador LTM R seleccionado.
Nivel 2, pgina Reiniciar a Predet. Consulte
Pgina Reiniciar a Predet, pgina 352.
Reini a Dist Realiza un rearme tras fallo a
distancia para un controlador
LTM R seleccionado.
Nivel 2, pgina Reini a Dist. Consulte Pgina
Reini a Dist, pgina 351.
Uso
372 1639505 06/2009
7.5 Utilizar el software PowerSuite
Descripcin general
En los siguientes temas se muestra cmo utilizar el controlador LTM R cuando est
conectado a un PC en el que se ejecuta el software PowerSuite
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Instalacin de software 373
Interfaz de usuario 374
Gestin de archivos 377
Ajustes de direccin IP almacenada 382
Direccionamiento IP maestra 383
Modo de configuracin/Sustitucin de dispositivo defectuoso 385
SNMP 387
Puerto HMI 389
Servicios que utilizan PowerSuite 391
Medicin y supervisin 392
Gestin de fallos 395
Comandos Self Test y Clear 397
Uso
1639505 06/2009 373
Instalacin de software
Descripcin general
El software PowerSuite es un programa basado en Microsoft
Windows
.
PowerSuite v2.5 es compatible con el sistema operativo Microsoft
Windows XP
.
PowerSuite v2.6 es compatible con los sistemas operativos Microsoft
Windows XP
y Windows Vista Business de 32 bits.
Instalacin de software
Para instalar el software PowerSuite en el PC, siga estos pasos:
Conexin del cable
Para conectar el PC a:
El puerto HMI del controlador LTM R o el mdulo de expansin LTM E, utilice el
convertidor RS-232 a RS-485 con el cable de comunicacin del LTM R.
Alguno de los dos puertos de red Ethernet del controlador LTM R, utilice un cable
Ethernet de par trenzado apantallado con conectores RJ-45.
Paso Accin
1 Coloque el disco de instalacin en la unidad de CD/DVD del PC.
2 Vaya hasta el archivo Setup.exe y haga clic en l. Se inicia el asistente de instalacin.
3 Siga las instrucciones intuitivas del asistente de instalacin.
Uso
374 1639505 06/2009
Interfaz de usuario
Descripcin general
PowerSuite proporciona una interfaz grfica de usuario intuitiva para el
controlador LTM R. Este software se puede utilizar:
En modo autnomo, para editar los archivos de configuracin del controlador
LTM R y guardar los archivos editados en un medio de su eleccin, como la
unidad de disco duro del PC o un CD.
Conectado al puerto HMI del controlador LTM R o al mdulo de expansin
LTM E, con la finalidad de:
cargar los archivos de configuracin desde el controlador LTM R al software
PowerSuite para editarlos, y descargar los archivos editados
supervisar y hacer un mantenimiento del funcionamiento del controlador
LTM R y el mdulo de expansin LTM E, as como de su instalacin
Uso
1639505 06/2009 375
Navegacin
Para navegar por la interfaz del software de configuracin, utilice las funciones del
control del men y la ventana principal, que se ilustran a continuacin:
1 Expanda (+) o contraiga (-) las ramas en el control del men
2 La flecha sombreada verde indica la rama seleccionada del control del men
3 La ventana principal muestra el contenido de la rama seleccionada del control del men
4 Conectado / Desconectado
Expanda el control del men, luego seleccione un elemento para mostrar los datos
de configuracin, supervisin y control en la ventana principal.
Utilice la barra de mens y la barra de iconos para realizar funciones de
configuracin, supervisin y control.
Para obtener informacin acerca de cmo utilizar las pantallas del software de
configuracin, consulte los comandos del archivo de ayuda del men Help.
Uso
376 1639505 06/2009
Rama Settings
En la rama Settings, ajuste los parmetros de acuerdo con el siguiente ejemplo:
NOTA:
Los parmetros obligatorios aparecen en rojo.
Una ayuda en lnea, con mens emergentes, le facilita informacin acerca de
cada parmetro configurable (nombre de registro, direccin de registro, rango y
paso).
Men Settings
El men Settings le permite seleccionar entre:
Languages
Preferences
El idioma de la interfaz puede ser English (predeterminado) o Franais.
Uso
1639505 06/2009 377
Gestin de archivos
Descripcin general
Los ajustes de configuracin del controlador LTM R se encuentran en un archivo de
configuracin electrnico. Utilice el software PowerSuite para gestionar los archivos
de configuracin del controlador LTM R. Podr:
Crear o editar un archivo de configuracin.
Transferir un archivo de configuracin entre:
el controlador LTM R y el software de configuracin PowerSuite que se
ejecuta en el PC
el controlador LTM R y un servidor FDR
Guardar los ajustes de configuracin editados en un archivo en el disco duro del
PC o en otros medios.
Cada vez que se abre el software de configuracin, aparece el cuadro de dilogo
Load Configuration. Utilice este cuadro de dilogo para seleccionar los ajustes de
configuracin que se mostrarn cuando se abra el software de configuracin.
Puede seleccionar:
Los ajustes predeterminados de fbrica.
Un archivo de configuracin anteriormente guardado.
Crear o editar archivos
Cuando se crea un nuevo archivo con el comando New Configuration del men
File, se debe introducir manualmente esta informacin, que los dispositivos
almacenan internamente, porque de lo contrario es posible que no estuviera
fcilmente disponible.
La manera recomendada de crear un archivo de configuracin es transferir una
configuracin desde el controlador LTM R y guardarla. De esta manera, toda la
informacin descriptiva acerca del controlador LTM R y el mdulo de expansin
LTM E se recupera y copia automticamente en el PC.
NOTA: Si cambia la red o el firmware en una configuracin PowerSuite existente,
todos los ajustes se restablecern a los predeterminados de fbrica. Las
selecciones de red y firmware estn disponibles en la pgina Device Information.
Los parmetros configurables se pueden encontrar en:
El apartado Settings del control de rbol.
El submen Languages del men Settings.
La pgina de comunicacin del cuadro de dilogo Preferences.
Para configurar los parmetros, seleccione primero un archivo de configuracin
para editarlo.
Transfiera la configuracin de los parmetros desde el controlador LTM R al
software de configuracin en el PC (consulte Transferir archivos entre el LTM R
y el PC, pgina 378).
O bien, abra un archivo de configuracin que haya guardado previamente.
Uso
378 1639505 06/2009
Transferir archivos entre el LTM R y el PC
Para transferir los parmetros de configuracin desde el controlador LTM R al PC y
guardarlos en un nuevo archivo de configuracin:
Para transferir los parmetros de configuracin del PC al controlador LTM R, deben
cumplirse las siguientes condiciones:
Al menos un ajuste del archivo de configuracin debe ser diferente del mismo
ajuste en el controlador LTM R, es decir, el software slo sobrescribe los ajustes
con valores diferentes.
La corriente medida debe ser inferior al 10% de FLC, es decir, no se debe
detectar corriente en lnea.
NOTA: Los cambios en la configuracin de los parmetros de cualquier servicio
Ethernet slo surtirn efecto despus de encender y apagar el controlador LTM R.
Paso Accin
1 Asegrese de que haya comunicacin entre el software de configuracin y el controlador LTM R: si en
la barra de tareas aparece "Disconnected", seleccione Connect en la barra de iconos o en el men Link.
2 Transfiera el archivo de configuracin desde el controlador LTM R al PC. Seleccione LTM R Controller
to PC en la barra de iconos o en el submen Link to File Transfer.
3 Una vez transferidos los ajustes de configuracin, utilice el software de configuracin para modificarlos.
4 Cuando haya finalizado las modificaciones, guarde su trabajo en un archivo:
Seleccione el comando Save en la barra de iconos o en el men File. Se abre el cuadro de dilogo
Save As.
- a continuacin -
En el cuadro de dilogo Save As, desplcese hasta la ubicacin deseada y haga clic en Save.
Uso
1639505 06/2009 379
Para transferir un archivo de configuracin desde el PC al controlador LTM R, siga
estos pasos:
NOTA: Al transferir el archivo de configuracin, el software comprueba que el
controlador LTM R y el archivo de configuracin utilicen el mismo rango de corriente
y protocolo de red.
Si no coinciden, el software le pregunta si desea continuar. Si elige continuar, el
software transfiere todos los parmetros coincidentes, pero excluye los que no han
pasado la comprobacin del rango. Una vez finalizada la transferencia, el software
muestra los nombres y direcciones de los parmetros que no pasaron la
comprobacin del rango y que, por lo tanto, no se transfirieron.
Transferir archivos entre el LTM R y el servidor FDR
El controlador LTM R admite el servicio de sustitucin de dispositivo defectuoso
(FDR). Puede utilizar este servicio para almacenar una copia de los ajustes de
configuracin del controlador, y restaurar manual o automticamente estos ajustes
en un controlador de sustitucin. Consulte el tema sobre sustitucin de dispositivo
defectuoso (vase pgina 411) para obtener una descripcin completa de este
servicio.
Para transferir manualmente los ajustes de configuracin del controlador LTM R al
servidor FDR:
Para transferir manualmente los parmetros de configuracin del servidor FDR al
controlador LTM R, deben cumplirse las siguientes condiciones:
Paso Accin
1 Asegrese de que haya comunicacin entre el software de configuracin y el controlador LTM R: si en
la barra de tareas aparece "Disconnected", seleccione Connect en la barra de iconos o en el men Link.
2 Compruebe que el archivo que se va a transferir est en la ventana principal. Para abrir un archivo:
Seleccione el comando Open Configuration en la barra de iconos o en el men File. Se abre el
cuadro de dilogo Open.
- a continuacin -
En el cuadro de dilogo Open, desplcese hasta la ubicacin deseada y haga clic en Open.
3 Transfiera el archivo de configuracin desde el PC al controlador LTM R. Seleccione PC to Device en
la barra de iconos o en el submen Link to File Transfer.
Paso Accin
1 Asegrese de que haya comunicacin entre el software de configuracin y el controlador LTM R: si en
la barra de tareas aparece "Disconnected", seleccione Connect en la barra de iconos o en el men Link.
2 Transfiera la configuracin del controlador LTM R al servidor FDR. Seleccione LTM R to Parameter
server en el submen Link File Transfer.
Uso
380 1639505 06/2009
Al menos un ajuste del archivo de configuracin debe ser diferente del mismo
ajuste en el controlador LTM R, es decir, el software slo sobrescribe los ajustes
con valores diferentes.
La corriente medida debe ser inferior al 10% de FLC, es decir, no se debe
detectar corriente en lnea.
Para transferir un archivo de configuracin desde el servidor FDR al controlador
LTM R, siga estos pasos:
Guardar archivos en el PC
Guarde en su PC una copia de los archivos de configuracin que planea transferir
al controlador LTM R. De esta forma, dispondr de un registro de estos ajustes para
que, si la transferencia inicial falla, se pueda utilizar una copia de seguridad para
volver a transferir estos ajustes. Utilice los comandos:
Save, para guardar los cambios de configuracin en el archivo de configuracin
abierto.
Save As, para guardar una copia de la configuracin mostrada en otro archivo.
NOTA: Si ha abierto el archivo que contiene los ajustes de configuracin predeter-
minados de fbrica, no puede realizar cambios en este archivo ni guardarlos. En su
lugar, debe utilizar el comando Save As para guardar los cambios con otro nombre
de archivo.
De forma predeterminada, el software de configuracin almacena los archivos
guardados en una carpeta llamada "Configurations". Esta carpeta se encuentra
ubicada en el disco duro en el mismo lugar donde se instal el software de
configuracin.
Para designar una carpeta diferente para almacenar el archivo de configuracin
predeterminado, siga estos pasos:
Paso Accin
1 Asegrese de que haya comunicacin entre el software de configuracin y el controlador LTM R: si en
la barra de tareas aparece "Disconnected", seleccione Connect en la barra de iconos o en el men Link.
2 Transfiera la configuracin desde el servidor FDR al controlador LTM R. Seleccione parameter server
to LTM R en el submen Link File Transfer.
Paso Accin
1 En el men Settings, seleccione Preferences. Se abre el cuadro de dilogo Preferences.
2 En el cuadro de dilogo Preferences, abra la ficha Configuration.
3 En la ficha Configuration, escriba el nombre de la carpeta y la ruta para guardar los archivos de
configuracin.
4 Haga clic en OK para cerrar el cuadro de dilogo Preferences y guardar los cambios.
Uso
1639505 06/2009 381
Exportar ajustes de configuracin
El software de configuracin puede exportar una lista de todos los parmetros
configurados. La lista se puede exportar en los siguientes formatos de archivo
electrnico:
hoja de clculo (.csv)
HTML
texto
XML
La lista exportada indica para cada parmetro:
estado de lectura o escritura
direccin de memoria
nombre
unidad de medida
valor editado en el software de configuracin (valor local)
valor predeterminado
valor almacenado en el controlador LTM R (valor de dispositivo)
valor mnimo
valor mximo
estado
Uso
382 1639505 06/2009
Ajustes de direccin IP almacenada
Descripcin general
Utilice la seccin sobre el formato de configuracin de la direccin IP para introducir
los ajustes de direccionamiento IP almacenado. El controlador LTM R aplica estos
ajustes cuando el conmutador rotatorio de unidades se ajusta en Stored.
Ajustes de direccin IP
Para acceder a los ajustes de direccin IP en PowerSuite, seleccione Ethernet en
la pgina Device Information y seleccione Settings Communication and HMI
en el control de rbol situado a la izquierda de la interfaz de usuario de PowerSuite.
La parte de la pgina de ajustes de direccin IP tiene el siguiente aspecto:
Puede configurar los ajustes siguientes mediante esta pantalla:
Consulte el tema Direccionamiento IP (vase pgina 403) para obtener ms
informacin sobre cmo el controlador LTM R obtiene los ajustes de direccin IP.
Campo Nombre del parmetro Descripcin Intervalo de ajuste
IP address Ajuste de direccin IP Ethernet Direccin IP almacenada
asignada por el usuario
Direccin IP de clase A, B o C
0.0.0.0255.255.255.255
Predeterminada = 0.0.0.0
Subnet mask Ajuste de mscara de subred
Ethernet
Mscara de subred
almacenada asignada por
el usuario
0.0.0.0...255.255.255.255
Predeterminada = 0.0.0.0
Default gateway Ajuste de direccin de pasarela
Ethernet
Direccin de pasarela
almacenada asignada por
el usuario
Direccin de clase A, B o C
0.0.0.0...255.255.255.255
Predeterminada = 0.0.0.0
Big/Little Endian Puerto de red-ajuste Endian Palabra (o "final") de la
variable de palabra doble
Big endian = la palabra ms
significativa primero
(predeterminado)
Little endian = la palabra
menos significativa primero
Frame Type Ajuste del tipo de trama del
puerto de red
Protocolo de trama Ethernet Ethernet II
(predeterminado)
802.3
Uso
1639505 06/2009 383
Direccionamiento IP maestra
Descripcin general
Utilice la seccin Prdida de comunicacin para introducir la direccin IP maestra
Modbus/TCP y para configurar cmo el controlador LTM R responde cuando el
puerto de red pierde la comunicacin con el maestro Modbus/TCP.
Ajustes de prdida de comunicacin
Para acceder a los ajustes de prdida de comunicacin en PowerSuite, seleccione
Ethernet en la pgina Device Information y seleccione Settings
Communication and HMI en el control de rbol situado a la izquierda de la interfaz
de usuario de PowerSuite. La parte de la pgina de prdida de comunicacin tiene
el siguiente aspecto:
Uso
384 1639505 06/2009
Puede configurar los ajustes siguientes mediante esta pantalla:
Consulte el tema IP maestra (vase pgina 423) para obtener ms informacin
sobre la comunicacin con el maestro Modbus/TCP.
Campo Nombre del parmetro Descripcin Intervalo de ajuste
Master IP address Ajuste de direccin IP Ethernet
maestra
Direccin IP del maestro
Modbus.
Direccin IP de clase A, B o C
0.0.0.0...255.255.255.255
Predeterminada = 0.0.0.0
Warning Puerto de red-activacin de
advertencia
Permite la notificacin de
una advertencia de prdida
de comunicacin. Se
desencadena una
advertencia tras la prdida
de comunicacin del puerto
de red.
Activado (predeterminado)
Desactivado
Fault Puerto de red-activacin de fallo Permite la notificacin de un
fallo de prdida de
comunicacin. Se
desencadena un fallo
cuando la comunicacin del
puerto de red se pierde
durante un periodo de
tiempo equivalente al
tiempo sobrepasado de
prdida de comunicaciones
del puerto de red.
Activado (predeterminado)
Desactivado
Fault Time Puerto de red-tiempo
sobrepasado de prdida de
comunicaciones
Periodo de tiempo durante
el que se debe perder la
comunicacin antes de
desencadenar un fallo de
comunicacin del puerto de
red.
0...9999 s
en incrementos de 0,01 s
Predeterminado = 60 s
FallBack Puerto de red-ajuste de
recuperacin
Comportamiento prescrito
de las salidas lgicas del
LTM R en caso de una
prdida de comunicacin
del puerto de red.
En espera
Marcha
LO.1, LO.2 desactivadas
(predeterminado)
LO.1, LO.2 activadas
LO.1 desactivada
LO.2 desactivada
Uso
1639505 06/2009 385
Modo de configuracin/Sustitucin de dispositivo defectuoso
Descripcin general
Utilice esta pantalla para:
Especificar cmo gestionar la configuracin del dispositivo, a travs de la red o
localmente.
Activar y desactivar el servicio de sustitucin de dispositivo defectuoso (FDR)
(vase pgina 411)
El servicio FDR proporciona al controlador LTM R un archivo de configuracin, que
contiene los ajustes de los parmetros de funcionamiento del dispositivo. El servicio
FDR ejecuta en el arranque del dispositivo y se puede configurar para que tambin
se ejecute peridicamente durante el funcionamiento del equipo.
Ajustes de sustitucin de dispositivo defectuoso
Para configurar la sustitucin de dispositivo defectuoso en PowerSuite, seleccione
Ethernet en la pgina Device Information y seleccione Settings
Communication and HMI en el control de rbol situado a la izquierda de la interfaz
de usuario de PowerSuite. La parte de la pgina de sustitucin de dispositivo
defectuoso tiene el siguiente aspecto:
Uso
386 1639505 06/2009
Puede configurar los ajustes siguientes mediante esta pantalla:
Campo Nombre del parmetro Descripcin Intervalo de ajuste
Network/Local
configuration
Configuracin mediante puerto
de red-activacin (601.10)
Activa/desactiva la
configuracin a travs del
puerto de red.
Activado (predeterminado)
Desactivado
FDR enabled Desactivacin FDR del puerto
de red (690.2)
Si los conmutadores
rotatorios del dispositivo se
ajustan en el modo DHCP
(conmutador izquierdo de
decenas entre 0 y 15, y
conmutador derecho de
unidades entre 0 y 9) y la
casilla de verificacin est:
Seleccionada, la
configuracin mediante
el servicio FDR est
activada.
Deseleccionada, el
servicio FDR est
desactivado y se utiliza
la configuracin local.
Activado (predeterminado)
Desactivado
Auto backup Activacin de la copia de
seguridad automtica FDR del
puerto de red (690.3)
Activa la comprobacin
automtica del archivo de
parmetros de
funcionamiento del
controlador comparndolo
con el archivo almacenado
en el servidor FDR. Si los
dos archivos son diferentes,
el servicio FDR guarda una
copia del archivo del
controlador en el servidor
FDR.
Activado (predeterminado)
Desactivado
Nota: El parmetro siguiente est activado slo cuando se selecciona Auto Backup:
Auto backup period Ajuste de la periodicidad de la
copia de seguridad automtica
FDR del puerto de red (697)
El tiempo entre las
comprobaciones de
sincronizacin automtica
del archivo de parmetros
de funcionamiento del
servidor FDR comparndolo
con el archivo del
controlador.
1...65535 s
Predeterminado = 120 s
Uso
1639505 06/2009 387
SNMP
Descripcin general
El controlador LTM R incorpora un agente SNMP que puede conectarse y
comunicarse con hasta dos administradores SNMP designados, como parte del
servicio SNMP (vase pgina 435). Una vez configurado como agente SNMP, el
controlador puede:
Llevar a cabo una comprobacin de autentificacin de cualquier administrador
SNMP que enve solicitudes al controlador.
Responder a solicitudes de un administrador SNMP autentificado que solicita la
recuperacin o la modificacin de los datos del controlador.
Enviar informes no solicitados al administrador tras:
un cambio en el estado del controlador, o
la recepcin de una solicitud SNMP de una fuente no autorizada
Ajustes SNMP
Para acceder a los ajustes SNMP en PowerSuite, seleccione Ethernet en la pgina
Device Information y seleccione Settings Communication and HMI en el control
de rbol situado a la izquierda de la interfaz de usuario de PowerSuite. La parte de
la pgina de SNMP tiene el siguiente aspecto:
Uso
388 1639505 06/2009
Puede leer o configurar los ajustes siguientes:
Campo Nombre del parmetro Descripcin Intervalo de ajuste
SNMP manager
address 1
Ajuste de direccin 1 de
administrador SNMP Ethernet
Direccin IP del primer
administrador SNMP
Direcciones de clase A, B y C
0.0.0.0 ... 255.255.255.255
Predeterminada = 0.0.0.0
SNMP manager
address 2
Ajuste de direccin 2 de
administrador SNMP Ethernet
Direccin IP del segundo
administrador SNMP
Direcciones de clase A, B y C
0.0.0.0 ... 255.255.255.255
Predeterminada = 0.0.0.0
SNMP system
name
Ajuste de nombre del sistema
SNMP Ethernet
Referencia comercial
(predeterminada) o como se
ha configurado
LTMRxxx (de slo lectura)
SNMP system
location
Ajuste de ubicacin del sistema
SNMP Ethernet
Ubicacin del dispositivo,
introducida por el usuario
0...32 caracteres
alfanumricos
SNMP system
contact
Ajuste de contacto del sistema
SNMP Ethernet
Nombre, introducido por el
usuario, de la persona de
contacto de asistencia
tcnica del dispositivo
0...32 caracteres
alfanumricos
GET community
name
Ajuste de obtencin de nombre
de comunidad SNMP Ethernet
Contrasea necesaria para
las solicitudes GET
0...16 caracteres
alfanumricos
Predeterminada = public_1
SET community
name
Ajuste de nombre de
comunidad SNMP Ethernet
Contrasea necesaria para
las solicitudes SET
0...16 caracteres
alfanumricos
Predeterminada = private_1
TRAP community
name
Ajuste de desviacin del
nombre de comunidad SNMP
Ethernet
Contrasea necesaria par
aceptar un mensaje TRAP
0...16 caracteres
alfanumricos
Predeterminada = public_1
Authentication
failure trap
Activacin del error de
autentificacin de la desviacin
SNMP del puerto de red
Permite el envo no
solicitado de desviaciones
de fallo de autentificacin
del controlador al
administrador SNMP
Activado (predeterminado)
Desactivado
Uso
1639505 06/2009 389
Puerto HMI
Descripcin general
Utilice la pgina HMI para configurar los ajustes de comunicacin del puerto HMI
del controlador LTM R.
Ajustes HMI
Para acceder a los ajustes HMI en PowerSuite, seleccione Ethernet en la pgina
Device Information y seleccione Settings Communication and HMI en el control
de rbol situado a la izquierda de la interfaz de usuario de PowerSuite. La parte de
la pgina de HMI tiene el siguiente aspecto:
Uso
390 1639505 06/2009
Puede leer o configurar los ajustes siguientes mediante esta pantalla:
Campo Nombre del parmetro Descripcin Intervalo de ajuste
Address HMI-ajuste de direccin de
puerto
Direccin del esclavo en el
puerto local HMI Modbus.
1...247
Predeterminada = 1
BaudRate HMI-ajuste de velocidad de
transmisin en baudios del
puerto
Velocidad en baudios en el
puerto local HMI Modbus.
1200...19.200 baudios
Predeterminada = 19200
Parity HMI-ajuste de paridad de puerto Paridad para comunicacin
Modbus a travs del puerto
local.
0 = Ninguno
1 = Par (predeterminado)
Big/Little Endian HMI-ajuste Endian de puerto Palabra (o "final") del valor
de mltiples palabras que
se lee primero.
Big endian = la palabra
ms significativa primero
(predeterminado)
Little endian = la palabra
menos significativa primero
HMI control Configuracin mediante teclado
de HMI-activacin
Activa el control del
controlador LTM R por parte
de un dispositivo HMI (por
ejemplo, el XBT de Magelis
o la unidad de control
LTM CU).
Activado (predeterminado)
Desactivado
PowerSuite control Configuracin mediante
herramienta HMI-activacin
Activa el control del
controlador LTM R
mediante el software
PowerSuite.
Activado (predeterminado)
Desactivado
Comm Loss
Warning
HMI-activacin de advertencia
de puerto
Permite la notificacin de
una advertencia de prdida
de comunicacin. Se
desencadena una
advertencia tras la prdida
de comunicacin del puerto
HMI.
Activado (predeterminado)
Desactivado
Comm Loss Fault HMI-activacin de fallo de
puerto
Permite la notificacin de un
fallo de prdida de
comunicacin. Se
desencadena un fallo
cuando la comunicacin del
puerto HMI se pierde
durante 7 segundos.
Activado (predeterminado)
Desactivado
FallBack HMI-ajuste de recuperacin de
puerto
Comportamiento prescrito
de las salidas lgicas del
LTM R en caso de una
prdida de comunicacin
del puerto HMI.
En espera
Marcha
LO.1, LO.2 desactivadas
(predeterminado)
LO.1, LO.2 activadas
LO.1 desactivada
LO.2 desactivada
Uso
1639505 06/2009 391
Servicios que utilizan PowerSuite
Descripcin general
Solo se puede acceder al men Servicios del software de configuracin en modo
Conected.
El menServices proporciona acceso a las siguientes funciones de configuracin:
Mantenimiento
Clear
Reset to Defaults
Reset to Defaults
Utilice el comando Services Reset to Defaults para borrar todas las configura-
ciones y restaurar los ajustes de fbrica. Se abre un cuadro dilogo de confirmacin
y, a continuacin, ejecuta el parmetro Clear All Command.
Consulte Parmetros configurables, pgina 587 para consultar una lista de los
parmetros de proteccin y los ajustes de fbrica respectivos.
Uso
392 1639505 06/2009
Medicin y supervisin
Descripcin general
Utilice el software PowerSuite para supervisar los valores de los parmetros de
cambio dinmico. Para localizar estos parmetros, utilice el control del men para
desplazarse hasta los submens, y seleccionarlos de una de las siguientes ramas
principales:
Medicin y supervisin
Parmetros.
Para poder supervisar los valores de los parmetros, debe existir un enlace de
comunicacin activo entre el software de configuracin y el controlador LTM R.
El software de configuracin actualiza peridicamente los valores de parmetros
accesibles a travs de la rama Metering and Monitoring y la rama Parameterss.
Enlace de comunicacin
Para supervisar los parmetros de cambio dinmico, se debe activar un enlace de
comunicacin entre el software de configuracin del PC y el controlador LTM R.
Para averiguar si existe tal enlace, compruebe la barra de tareas en la parte inferior
del software de configuracin. Si la barra de tareas indica:
Connected, existe un enlace de comunicacin entre el PC y el controlador LTM R
y puede supervisar los valores de los parmetros de cambio dinmico.
Disconnected, seleccione Connect en la barra de iconos o en el men Link.
Uso
1639505 06/2009 393
Rama Metering and Monitoring
Seleccione una subrama Metering and Monitoring para mostrar una serie de
medidores grficos o unos LED de fallo y advertencia que proporcionan una
actualizacin del estado de los parmetros supervisados fcil de entender (consulte
el ejemplo Current Readings a continuacin).
Uso
394 1639505 06/2009
Rama Parameters
Seleccione una subrama Parameters para mostrar informacin sobre All
Parameters, Configuration Parameters o Read-only Parameters. En la columna
Device Value se indica el valor notificado ms reciente del parmetro supervisado.
Ventana Quick Watch
En lugar de supervisar grandes agrupaciones de parmetros, puede optar por
supervisar nicamente una lista corta de parmetros que seleccione. Para ello:
La lista de parmetros de la ventana Quick Watch se actualiza con la misma
frecuencia que las pantallas de la rama Parameters.
Paso Descripcin
1 En el men View, seleccione la ventana Quick Watch . La ventana Quick Watch se abre.
2 En la ventana Quick Watch, escriba la direccin de un parmetro y haga clic en el
botn Add. El parmetro se aade a la lista.
Nota: Puede encontrar la direccin de un parmetro, si selecciona All Parameters en
la rama Parameters y busca el nombre y la direccin del parmetro deseado.
3 Repita el paso 2 con cada parmetro que desee aadir a la lista.
Uso
1639505 06/2009 395
Gestin de fallos
Descripcin general
Utilice el software PowerSuite para supervisar el estado de todos los parmetros de
fallo activados.
Supervisin de fallos
Desplcese por el control del men y seleccione Metering and Monitoring Status,
Faults and Warnings para mostrar una presentacin grfica de los LED de fallo (vea
a continuacin). El controlador LTM R supervisa su estado global y detecta
advertencias y fallos. El software PowerSuite muestra esta informacin mediante el
LED de colores:
Tipo de informacin Color del LED Descripcin
Estado global Gris Condicin no detectada
Verde Condicin detectada
Fallos y advertencias Gris Sin advertencias ni fallos, o
proteccin desactivada
Amarillo Advertencia
Rojo Fallo
Uso
396 1639505 06/2009
La pantalla de supervisin de fallos del software PowerSuite se parece a sta:
Uso
1639505 06/2009 397
Comandos Self Test y Clear
Descripcin general
El software PowerSuite proporciona los siguientes comandos de control:
Self Test
Clear:
All
Protection Settings
Network Port Settings
Statistics
Thermal Capacity Level
Se abre el cuadro de dilogo de confirmacin y, a continuacin, los comandos
tienen efecto inmediatamente despus de su ejecucin. Slo estn disponibles
cuando existe comunicacin entre el software de configuracin y el controlador
LTM R.
Self Test
Utilice el comando Self Test para comprobar el funcionamiento interno del
controlador LTM R y el mdulo de expansin LTM E. El comando Self Test est
situado en el men Services en Services Maintenance Self Test.
Para obtener ms informacin acerca de la funcin de comprobacin automtica,
consulte Comprobacin automtica con el motor encendido, pgina 570.
Uso
398 1639505 06/2009
Clear
Utilice los comandos de borrar para los siguientes fines:
Comando Descripcin Nombre del parmetro
All Restaura todos los parmetros a sus
ajustes de fbrica.
Borrar todo-comando.
Protection Settings Restaura todos los parmetros de
proteccin a sus ajustes de fbrica.
Borrar configuracin del
controlador-comando
Network Port Settings Restaura los parmetros del puerto
de red a sus ajustes de fbrica.
Borrar configuracin de
puerto de red-comando
Statistics Pone a 0 todos los histricos. Borrar histricos-
comando.
Thermal Capacity Level Establece en 0 los parmetros Nivel
de capacidad trmica y Ciclo rpido-
tiempo sobrepasado de bloqueo.
Consulte la siguiente advertencia.
Borrar nivel de
capacidad trmica-
comando
ADVERTENCIA
PRDIDA DE PROTECCIN DEL MOTOR
Borrar la capacidad trmica anula la proteccin trmica, lo que puede provocar
que se sobrecaliente e incendie el equipo. El funcionamiento continuado con la
proteccin trmica anulada debe limitarse a aplicaciones en las que es esencial el
rearranque inmediato.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Uso
1639505 06/2009 399
7.6 Utilizar los servicios Ethernet
Descripcin general
En esta seccin se describen los servicios Ethernet y los parmetros de
configuracin Ethernet relacionados, que admite Modbus
/TCP.
NOTA: Los cambios en la configuracin de los parmetros de cualquier servicio
Ethernet slo surtirn efecto despus de encender y apagar el controlador LTM R.
(1) Para ms informacin, consulte NEMA ICS 1.1 (ltima edicin), "Safety
Guidelines for the Application, Installation, and Maintenance of Solid State Control"
(Directrices de seguridad para la aplicacin, la instalacin y el mantenimiento del
control de estado esttico).
ADVERTENCIA
PRDIDA DE CONTROL
El diseador del esquema de control debe tener en cuenta los modos de fallo
de rutas de control posibles y, para ciertas funciones crticas, proporcionar los
medios para lograr un estado seguro durante y despus de un fallo de ruta.
Ejemplos de funciones crticas de control son la parada de emergencia y la
parada de sobrerrecorrido.
Para las funciones crticas de control deben proporcionarse rutas de control
separadas o redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicacin.
Deben tenerse en cuenta las implicaciones de retardos o fallos de transmisin
no anticipados del enlace
(1)
.
Cada implementacin de un controlador LTM R debe probarse de forma
individual y exhaustiva para comprobar su funcionamiento correcto antes de
ponerse en servicio.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Uso
400 1639505 06/2009
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
ADVERTENCIA
REARRANQUE INESPERADO DEL MOTOR
Compruebe que el software de aplicacin de PLC:
Tenga en cuenta los cambios de control local a control a distancia.
Gestione de forma adecuada los comandos de control del motor al efectuar
estos cambios.
Al seleccionar los canales de control de red, y en funcin de la configuracin del
protocolo de comunicacin, el controlador LTM R puede tener en cuenta el ltimo
estado conocido de los comandos de control del motor procedentes del PLC y
provocar el rearranque automtico del motor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Gestin del enlace Ethernet 401
Direccionamiento IP 403
Sustitucin de dispositivo defectuoso 411
Configuracin de la exploracin de E/S 419
IP maestra 423
Actualizacin del firmware del puerto de red 425
Diagnstico Ethernet 426
Protocolo simple de administracin de red (SNMP) 435
Utilizar la herramienta de diagnstico Ethernet ConneXview 438
Uso
1639505 06/2009 401
Gestin del enlace Ethernet
Descripcin general
El controlador LTM R puede recibir o proporcionar servicios Ethernet slo si existe
un enlace de comunicaciones Ethernet. Un enlace de comunicaciones Ethernet
puede existir slo cuando un cable conecta uno de los puertos de red del
controlador a la red. Si no existe ninguna conexin del cable de red, el servicio
Ethernet no est disponible.
El comportamiento del controlador se describe en cada una de las situaciones
siguientes:
El LTM R se enciende sin ningn cable de red conectado.
Un cable de red est conectado a un controlador anteriormente desconectado
despus del encendido.
Todos los cables de red estn desconectados del controlador despus del
encendido.
Uno o varios cables de red se vuelven a conectar a un controlador despus de
que todos los cables de red se hubieran desconectado previamente.
Ningn enlace mientras LTM R se enciende
Cuando el LTM R se enciende sin ningn cable de red conectado, el LTM R:
Entra en estado de fallo FDR si los conmutadores rotatorios se encuentran en la
posicin DHCP.
Entra en estado de fallo FDR durante 10 s y despus borra automticamente el
fallo si los conmutadores rotatorios se encuentran en las posiciones Stored,
BootP, ClearIP o Disabled.
Ningn enlace en el encendido
Despus del encendido del controlador, cuando se conecta un cable de red
Ethernet a un controlador previamente desconectado:
El controlador inicia el servicio de direccionamiento IP (vase pgina 403), el
cual:
Obtiene los ajustes de direccin IP.
Valida los ajustes de direccin IP.
Comprueba que los ajustes de direccin IP obtenidos no estn duplicados.
Asigna los ajustes de direccin IP recibidos al controlador.
Despus de asignar los ajustes de direccin IP, el controlador:
Inicia el servicio FDR y obtiene sus parmetros de funcionamiento.
Despus, inicia el servicio Modbus.
El tiempo para recuperar el enlace e iniciar los servicios Ethernet suele ser de 1
segundo.
Uso
402 1639505 06/2009
Enlace desconectado despus del encendido
Cuando todos los cables de red Ethernet estn desconectados del controlador
despus del encendido:
El servicio FDR se desactiva.
Todas las conexiones de servicio Modbus se restablecen.
Si existe una conexin IP maestra y:
El enlace no puede restablecerse, por ejemplo, el cable no est enchufado al
controlador, antes de que el parmetro Puerto de red-tiempo sobrepasado de
prdida de comunicaciones expire, el controlador entra en el estado de
recuperacin preconfigurado si el LTM R se encuentra en control de red.
El enlace se restablece antes que el parmetro Puerto de red-tiempo
sobrepasado de prdida de comunicaciones expire, se conserva la conexin
con la IP maestra y el controlador no entra en estado de recuperacin.
Reconexin del enlace despus de la desconexin
Cuando uno o varios cables de red Ethernet se vuelven a conectar al controlador,
despus de desconectar todos los cables de red tras el encendido, el controlador
ejecuta muchas de las mismas tareas que cuando no existe Ningn enlace en el
encendido (vase pgina 401), pero no todas. En particular, el controlador:
Asume que los ajustes de direccin IP obtenidos anteriormente son vlidos y:
Comprueba que los ajustes de direccin IP no estn duplicados.
Vuelve a asignar los ajustes de direccin IP al controlador.
Despus de asignar los ajustes de direccin IP, el controlador:
Inicia el servicio FDR y obtiene sus parmetros de funcionamiento.
Despus, inicia el servicio Modbus.
El tiempo para recuperar el enlace e iniciar los servicios Ethernet suele ser de 1
segundo.
Uso
1639505 06/2009 403
Direccionamiento IP
Descripcin general
El controlador LTM R debe obtener una direccin IP nica, una mscara de subred
y una direccin de pasarela para comunicarse a travs de una red Ethernet. Los
ajustes de los dos conmutadores rotatorios de la parte frontal del controlador LTM R
determinan el origen de estos ajustes bsicos. Estos ajustes se aplican slo en el
encendido. Los conmutadores rotarios tienen el aspecto siguiente:
Uso
404 1639505 06/2009
Los ajustes de los conmutadores rotatorios determinan el origen de los parmetros
de direccin IP del controlador LTM R y la activacin del servicio FDR de la
siguiente manera:
Los ajustes IP se asignan a los parmetros siguientes:
Direccin IP Ethernet (2006-2007)
Mscara de subred Ethernet (2008-2009)
Direccin de pasarela Ethernet (2010-2011)
Conmutador izquierdo
(decenas)
Conmutador derecho
(unidades)
Origen de los parmetros IP
0 a 15
(1)
0 a 9
(1)
Servidor DHCP y servicio FDR
N/D
(2)
BootP Servidor BootP
N/D
(2)
Stored El conmutador rotatorio no se utiliza para determinar
parmetros IP. Se utilizan los ajustes configurados del
LTM R. Si no existen, los parmetros IP se basan en la
direccin MAC. El servicio Modbus se desactiva.
N/D
(2)
Clear IP Borra los ajustes IP almacenados. No se asigna ningn
ajuste de direccionamiento IP. El puerto de red se
desactiva.
N/D
(2)
Disabled El conmutador rotatorio no se utiliza para determinar
parmetros IP. Se utilizan los ajustes configurados del
LTM R. Si no existen, los parmetros IP se basan en la
direccin MAC. El servicio Modbus se desactiva.
(1) Los dos conmutadores producen un valor de 000 a 159, que identifica de forma nica el dispositivo ante el
servidor DHCP. En la imagen anterior, este valor es 084, que es la unin de:
El conmutador de decenas (08) y
el conmutador de unidades (4)
Los valores individuales de cada conmutador rotatorio, en este caso 08 y 4, se incorporan al nombre del
dispositivo, tal y como se describe a continuacin.
(2) El conmutador rotatorio izquierdo (decenas) no se utiliza. El conmutador rotatorio derecho (unidades) por si solo
determina el origen de los parmetros IP.
Uso
1639505 06/2009 405
Obtener los parmetros IP de un servidor DHCP
Hasta 160 controladores LTM R distintos pueden obtener automticamente sus
parmetros de direccionamiento IP de un nico servidor DHCP.
Para obtener parmetros IP de un servidor DHCP, apunte cada conmutador
rotatorio a un ajuste numrico, tal y como se indica a continuacin:
La unin de estos ajustes, un nmero del 000 al 159, es la direccin de red del
dispositivo. El controlador LTM R incluye este valor en una solicitud de difusin a un
servidor DHCP de parmetros IP.
El servidor DCHP debe estar preconfigurado con la direccin de red del controlador
LTM R y los parmetros IP asociados. Cuando el servidor DHCP recibe la solicitud
de difusin del controlador LTM R, devuelve:
Los siguientes elementos del controlador LTM R:
direccin IP
mscara de subred
direccin de pasarela
La direccin IP del servidor DHCP.
NOTA: El controlador LTM R utiliza la direccin IP del servidor DHCP durante el
proceso de sustitucin de dispositivo defectuoso (vase pgina 403) (FDR), al
realizar una solicitud FTP o TFTP de los parmetros de configuracin del
dispositivo.
Nombre de dispositivo: Los ajustes de los dos conmutadores rotatorios se utilizan
para determinar el nombre de dispositivo de cada controlador LTM R. El nombre de
dispositivo est formado por una parte fija ("TeSysT") y una parte dinmica
compuesta por:
el valor de dos dgitos (00 a 15) del conmutador rotatorio de decenas (xx) y
el valor de un dgito (0 a 9) del conmutador rotatorio de unidades (y)
En la figura anterior, el nombre de dispositivo es: TeSysT084.
NOTA: El servidor DHCP puede proporcionar una direccin IP a un dispositivo
cliente slo despus de que dicho servidor se haya configurado con el nombre de
dispositivo, descrito anteriormente, para un dispositivo cliente.
Paso Descripcin
1 Fije el conmutador izquierdo (decenas) en un valor de 0 a 15.
2 Fije el conmutador derecho (unidades) en un valor de 0 a 9.
Uso
406 1639505 06/2009
Obtener los parmetros IP de un servidor BootP
Para obtener parmetros IP de un servidor BootP, mueva el conmutador rotatorio
derecho (unidades) a alguno de los dos ajustes BootP (el conmutador rotatorio
izquierdo, decenas, no se utiliza). El controlador LTM R difunde una solicitud de
parmetros IP a un servidor BootP, e incluye su direccin MAC en la solicitud.
El servidor BootP debe estar preconfigurado con la direccin MAC del controlador
LTM R y los parmetros IP asociados. Cuando el servidor BootP recibe la solicitud
de difusin del controlador LTM R, devuelve al controlador LTM R su:
direccin IP
mscara de subred
direccin de pasarela
NOTA: El servicio de sustitucin de dispositivo defectuoso (FDR) no est disponible
si el controlador LTM R est configurado para recibir parmetros IP de un servidor
BootP.
Utilizar los parmetros IP almacenados
Puede configurar el controlador LTM R para aplicar los ajustes IP que se han
configurado y almacenado anteriormente en el propio dispositivo. Estos parmetros
IP almacenados se pueden configurar utilizando una herramienta de configuracin
de su eleccin.
Para aplicar los parmetros IP almacenados:
El controlador LTM R utiliza como su:
Direccin IP: el parmetro de ajuste de direccin IP Ethernet (3000-3001)
Mscara de subred: el parmetro de ajuste de mscara de subred Ethernet
(3002-3003)
Direccin de pasarela: el parmetro Ajuste de direccin de pasarela Ethernet
(3004-3005)
NOTA: Si estos parmetros no estn preconfigurados, el controlador LTM R no
puede aplicar los ajustes almacenados y, en lugar de ello, aplica los parmetros IP
predeterminados, tal y como se describe a continuacin.
NOTA: El servicio FDR no est disponible cuando el controlador LTM R se ha
configurado para utilizar los parmetros IP almacenados.
Paso Descripcin
1 Ajuste el conmutador derecho (unidades) en Clear IP (se eliminan los ajustes IP existentes).
2 Vuelva a ajustar el conmutador derecho (unidades) en cualquier de las posiciones Stored (el
conmutador rotatorio izquierdo, decenas, no se utiliza).
Uso
1639505 06/2009 407
Configurar los parmetros IP predeterminados a partir de la direccin MAC
El controlador LTM R obtiene sus parmetros IP predeterminados de su direccin
MAC (almacenada en el parmetro de direccin MAC Ethernet del dispositivo). La
direccin MAC es un identificador casi nico asociado a la tarjeta de interfaz de red
(NIC) del dispositivo.
Un requisito previo para utilizar la direccin IP predeterminada es que todos los
bytes de la direccin IP configurada (vase pgina 382) deben establecerse en
cero.
Para aplicar los parmetros IP predeterminados del controlador LTM R debe
ejecutar dos pasos:
1 Borrar la direccin IP existente ajustando el conmutador rotatorio derecho
(unidades) en Clear IP y, a continuacin, apagar y encender el controlador.
2 Aplicar la direccin IP almacenada ajustando el conmutador rotatorio derecho
(unidades) en Stored y, a continuacin, apagar y encender el controlador.
Los parmetros IP predeterminados se generan de la forma siguiente:
Los primeros valores de dos bytes de la direccin IP son siempre 85.16.
Los ltimos valores de dos bytes de la direccin IP se obtienen de los dos ltimos
bytes de la direccin MAC.
La mscara de subred predeterminada es siempre 255.0.0.0.
La pasarela predeterminada es lo mismo que la direccin IP predeterminada del
dispositivo.
Por ejemplo, para un dispositivo con una direccin MAC hexadecimal de
000054EF1001, los dos ltimos bytes son "10" y "01". Estos valores hexadecimales
se traducen a los valores decimales "16" y "01". Los parmetros IP predeterminados
para esta direccin MAC son:
direccin IP: 85.16.16.01
mscara de subred: 255.0.0.0
direccin de pasarela: 85.16.16.01
NOTA: El servicio de sustitucin de dispositivo defectuoso (FDR) y el servicio
Modbus no estarn disponibles cuando se utilicen los parmetros IP
predeterminados.
Uso
408 1639505 06/2009
Proceso de asignacin de IP
Tal y como se indica en el siguiente grfico, el controlador LTM R ejecuta una
secuencia de consultas para determinar su direccin IP:
NOTA: El servicio de sustitucin de dispositivo defectuoso (FDR) y el servicio
Modbus no estarn disponibles cuando se utilicen los parmetros IP
predeterminados.
Uso
1639505 06/2009 409
En el siguiente diagrama se muestra el proceso de asignacin de la direccin IP
predeterminada, mencionado con anterioridad:
Uso
410 1639505 06/2009
Asignacin de IP y LED STS
Durante el proceso de asignacin de direcciones IP, mientras el LTM R funcione
con normalidad y no surjan fallos internos, el LED STS de color verde indicar las
siguientes condiciones:
NOTA: Una serie de ocho parpadeos consecutivos del LED STS indica una
condicin de fallo FDR irrecuperable. Las causas y las posibles soluciones de un
fallo FDR irrecuperable son:
Un fallo de comunicacin interna con el controlador LTM R: apague y encienda
el controlador; si no funciona, sustituya el controlador.
Una configuracin no vlida de las propiedades Ethernet (normalmente ajustes
de la direccin IP o de la direccin IP maestra): verifique los ajustes de los
parmetros de direccin IP.
Un archivo de parmetro de funcionamiento daado o no vlido: transfiera un
archivo de parmetro correcto desde el controlador al servidor de archivos de
parmetro (vase pgina 415). Consulte el tema Tratamiento de fallos FDR no
recuperables (vase pgina 301) para obtener informacin adicional.
Ajuste(s) de
conmutador
Comportamiento del LED STS Descripcin
BootP Parpadea cinco veces, y repite. El controlador ha enviado una solicitud BootP, pero el
servidor BootP no ha proporcionado ajustes de direccin IP
nicos y vlidos. Esperando al servidor BootP.
Parpadea cinco veces, y
permanece encendido.
El controlador ha enviado una solicitud BootP, y el servidor
BootP ha proporcionado ajustes de direccin IP nicos y
vlidos.
Stored Encendido. El controlador LTM R est configurado con ajustes de
direccin IP almacenada nicos y vlidos.
Parpadea seis veces, y repite. No se ha almacenado ningn parmetro IP nico y vlido.
Los ajustes IP predeterminados se generan utilizando la
direccin MAC.
Clear IP Parpadea dos veces, y repite. Los ajustes de direccin IP se han borrado. No hay ningn
ajuste de direccin IP disponible. El controlador no se ha
podido comunicar utilizando sus puertos de red Ethernet.
Disabled Encendido. El controlador LTM R est configurado con ajustes de
direccin IP almacenada nicos y vlidos.
Parpadea seis veces, y repite. No se ha almacenado ningn parmetro IP nico y vlido.
Los ajustes IP predeterminados se generan utilizando la
direccin MAC.
Conmutador
izquierdo (decenas)
ajustado en 0-15
(xx)
Conmutador
derecho (unidades)
ajustado en 0-9 (y)
Parpadea cinco veces, y repite. El controlador ha enviado una solicitud DHCP para el
nombre de dispositivo (TeSysTxxy), pero el servidor DHCP
no ha proporcionado ajustes de direccin IP nicos y
vlidos. Esperando al servidor DHCP.
Parpadea cinco veces, y
permanece encendido.
El controlador ha enviado una solicitud DHCP para el
nombre de dispositivo (TeSysTxxy), y el servidor DHCP ha
proporcionado ajustes de direccin IP nicos y vlidos.
Uso
1639505 06/2009 411
Sustitucin de dispositivo defectuoso
Descripcin general
El servicio FDR utiliza un servidor central para almacenar los parmetros de
direccionamiento IP y los parmetros de funcionamiento de un controlador LTM R.
Cuando se sustituye un controlador LTM R defectuoso, el servidor configura
automticamente el controlador LTM R de sustitucin con el mismo direcciona-
miento IP y los mismos parmetros de funcionamiento que tena el controlador
defectuoso.
NOTA: El servicio FDR slo est disponible cuando los conmutadores rotatorios de
unidades y decenas del controlador se han fijado en enteros. El servicio FDR no
est disponible cuando el conmutador rotatorio de unidades se ha fijado en BootP,
Stored, Clear IP o Disabled.
El servicio FDR incluye comandos y ajustes configurables a los que puede acceder
utilizando la herramienta de configuracin de su eleccin. Estos comandos y ajustes
son:
Comandos que le permiten manualmente:
Hacer una copia de seguridad de los parmetros de funcionamiento del
controlador LTM R, cargando una copia del archivo de parmetros del
dispositivo en el servidor desde el controlador.
Restaurar los parmetros del controlador LTM R, cargando una copia del
archivo de parmetros de funcionamiento del dispositivo desde el servidor en
el controlador.
Los ajustes que hacen que el servidor FDR sincronice automticamente los
archivos de parmetros de funcionamiento, en el controlador LTM R y en el
servidor, a intervalos de tiempo configurables. Si se detecta una diferencia, se
enva un archivo de parmetros desde el controlador al servidor FDR (copia de
seguridad automtica).
Condiciones previas de FDR
Antes de que el servicio FDR pueda funcionar, el servidor FDR debe configurarse
con:
La direccin de red del controlador LTM R y los parmetros de direccionamiento
IP relacionados. Este proceso se realiza como parte del servicio de direcciona-
miento IP (vase pgina 403).
Una copia del archivo de parmetros de funcionamiento del controlador LTM R.
Se puede enviar desde el controlador al servidor manual o automticamente, tal
y como se describe a continuacin.
Uso
412 1639505 06/2009
FDR y archivo de lgica personalizada
Si el archivo de lgica personalizada es inferior a 3 kbytes, el servicio FDR guarda
la lgica personalizada en el archivo de parmetros de funcionamiento,
Si el tamao del archivo de lgica personalizada es mayor de 3 kbytes, slo se
guarda el archivo de parmetros de funcionamiento.
En este caso, cuando se sustituye un dispositivo con un tamao de archivo de
lgica personalizada mayor de 3 kbytes, el LED STS del dispositivo nuevo parpadea
ocho veces para sealar un error crtico.
Para solucionar el error y reanudar las operaciones:
1. Utilice el software PowerSuite para descargar la configuracin.
2. Apague y encienda el controlador LTM R.
Proceso FDR
El proceso FDR est formado por tres etapas:
La asignacin de los ajustes de direccin IP.
Una comprobacin del archivo de parmetros de funcionamiento en cada
encendido del controlador LTM R.
Si se activa la sincronizacin automtica, comprobaciones peridicas del archivo
de parmetros de funcionamiento del controlador LTM R.
Estos tres procesos se describen a continuacin:
Proceso de asignacin de ajustes de direccin IP:
Secuencia Suceso
1 El personal de asistencia utiliza los conmutadores rotatorios situados en la parte frontal del
controlador LTM R de sustitucin para asignarle la misma direccin de red (000 a 159) que el
dispositivo defectuoso.
2 El personal de servicio coloca el controlador LTM R de sustitucin en la red.
3 El controlador LTM R enva automticamente una solicitud DHCP al servidor para obtener sus
parmetros IP.
4 El servidor enva al controlador LTM R:
Los parmetros IP, que incluyen:
direccin IP
mscara de subred
direccin de pasarela
La direccin IP del servidor.
5 El controlador LTM R aplica sus parmetros IP.
Uso
1639505 06/2009 413
Proceso de puesta en marcha FDR:
Proceso de sincronizacin automtica FDR:
Secuencia Suceso
6 Si se ha activado FDR en la pantalla de configuracin FDR (vase pgina 385):
a El controlador enva una solicitud FTP o TFTP al servidor FDR para obtener una copia del
archivo servido.
b El servidor FDR enva al controlador una copia del archivo servido.
c El controlador comprueba el nmero de versin y el tamao del archivo servido para verificar
la compatibilidad con el dispositivo. Si el archivo servido es:
Compatible, el archivo servido se aplica.
No compatible, el controlador entra en estado de error interno crtico
(1)
.
Notas:
1. Debido a que se ha seleccionado el valor predeterminado de Activar FDR, un controlador
LTM R nuevo siempre descarga e intenta aplicar un archivo servido en el primer encendido.
2. Si el archivo descargado est vaco, el controlador utilizar el archivo local y enviar una copia
de dicho archivo al servidor.
Si se deselecciona Activar FDR: El controlador aplica el archivo de parmetros de
funcionamiento almacenado en la memoria no voltil del controlador LTM R.
7 El controlador LTM R reanuda las operaciones.
(1) En caso de error interno crtico, el problema deber solucionarse y el controlador deber apagarse y encenderse
antes de reanudar las operaciones.
Secuencia Suceso
8 El controlador comprueba el parmetro Ajuste de la periodicidad de la copia de seguridad
automtica FDR del puerto de red (697) para determinar si el temporizador de sincronizacin
automtica FDR ha vencido.
9 Si el temporizador:
No ha vencido: no se ejecuta ninguna accin.
Ha vencido: el controlador comprueba el parmetro Activacin de la copia de seguridad
automtica FDR del puerto de red (690.3).
10 Si el parmetro Activacin de la copia de seguridad automtica FDR del puerto de red (690.3) es:
Copia de seguridad automtica (1): el controlador enva una copia del archivo local al
servidor FDR.
No sincro (0): el controlador no ejecuta ninguna accin.
11 El controlador LTM R reanuda las operaciones.
Uso
414 1639505 06/2009
En los siguientes diagramas se describen los procesos FDR del controlador tras la
asignacin de una direccin IP:
Uso
1639505 06/2009 415
Configurar FDR
El servicio FDR supervisa el archivo de parmetros de funcionamiento almacenado
en el controlador LTM R y lo compara con el archivo de parmetros de funciona-
miento correspondiente almacenado en el servidor.
Cuando el servicio FDR detecta una discrepancia entre estos dos archivos:
Se establece el parmetro Estado FDR del puerto de red (vase pgina 418)
(490.8-11).
Los dos archivos de parmetros de funcionamiento, uno en el servidor y el otro
en el controlador, deben estar sincronizados.
La sincronizacin de los archivos de parmetros de funcionamiento se puede
realizar de forma automtica o manual, utilizando la herramienta de configuracin
de su eleccin.
Uso
416 1639505 06/2009
Ajustes de copia de seguridad automtica: Con el ajuste de los parmetros
siguientes, podr configurar el controlador LTM R para que sincronice automti-
camente sus parmetros de funcionamiento con el servidor FDR:
NOTA: Cuando se activa la sincronizacin automtica, se recomienda fijar el
parmetro Ajuste de la periodicidad de la copia de seguridad automtica FDR del
puerto de red en un valor >120 s.
Ajustes de restauracin y copia de seguridad manual: Si ejecuta los comandos
descritos a continuacin, podr sincronizar manualmente los archivos de
parmetros de funcionamiento en el controlador y en el servidor:
NOTA:
Si los bits de Comando de copia de seguridad de datos FDR (705.5) y Comando
de restauracin de datos FDR (705.6) se fijan en 1 de forma simultnea, se
ejecuta Comando de restauracin de datos FDR.
Comando de restauracin de datos FDR (705.6) se encuentra activo,
independientemente de si la configuracin mediante puerto de red (601.10) est
activada o no.
Nombre del parmetro Descripcin
Activacin de la copia de seguridad
automtica FDR del puerto de red (690.3)
Utilice este ajuste para activar/desactivar la sincronizacin
automtica de los archivos de parmetros de funcionamiento. Las
selecciones son:
Sin copia de seguridad automtica: la sincronizacin
automtica de los archivos se desactiva (690.3 = 0).
Copia de seguridad automtica: la sincronizacin automtica
de los archivos se activa y, en caso de discrepancia, el archivo del
controlador se copia en el servidor (690.3 = 1).
Ajuste de la periodicidad de la copia de
seguridad automtica FDR del puerto de red
(697)
La frecuencia, en segundos, entre comparaciones del archivo de
parmetros en el controlador y el archivo de parmetros almacenado
en el servidor. De 1 a 65535 s en incrementos de 1 s, predeterminada
= 20 s.
Nombre de comando Descripcin
Comando de copia de seguridad de datos
FDR (705.5)
Copia el archivo de parmetros de funcionamiento del controlador en
el servidor.
Comando de restauracin de datos FDR
(705.6)
Copia el archivo de parmetros de funcionamiento del servidor en el
controlador.
Uso
1639505 06/2009 417
Comando de restauracin de datos FDR (705.6) no se puede ejecutar mientras
el LTM R detecte corrientes de lnea.
Cada vez que modifique la configuracin del controlador LTM R, deber hacer
una copia de seguridad del nuevo archivo de configuracin en el servidor
manualmente. Consulte el tema sobre gestin de archivos (vase pgina 377)
para obtener instrucciones acerca de cmo utilizar el software PowerSuite para
transferir archivos de parmetros manualmente entre el LTM R y el servidor
FDR.
Recuperacin de errores
Cuando el controlador LTM R experimenta un error crtico durante el proceso de
puesta en marcha FDR, el LED STS parpadea de la forma siguiente:
Errores recuperables:
Las operaciones pueden reanudarse tras resolver el error. Los errores recuperables
son:
Ningn archivo en el servidor de parmetros (Estado FDR del puerto de red
(490.8-11) = 3).
El servidor de archivos de parmetros, o el servicio TFTP, est inactivo (Estado
FDR del puerto de red (490.8-11) = 2).
Errores irrecuperables:
Cuando el archivo de parmetros del servidor no es vlido o est daado, el error
es irrecuperable. Las operaciones se pueden reanudar slo despus de copiar un
nuevo archivo de parmetros manualmente desde el controlador en el servidor
utilizando Comando de copia de seguridad de datos FDR (705.5) y de apagar y
encender el controlador. Los errores no recuperables son:
Las versiones del archivo de parmetros del servidor de parmetros y del
controlador LTM R no coinciden (Estado FDR del puerto de red (490.8-11) = 13).
No hay coincidencia de CRC entre el archivo de parmetros del servidor y del
controlador LTM R ((Estado FDR del puerto de red (490.8-11) = 9).
El contenido del archivo de parmetros no es vlido (Estado FDR del puerto de
red (490.8-11) = 4).
Nmero de parpadeos Indica que el error es...
8 parpadeos por segundo Irrecuperable
10 parpadeos por segundo Recuperable
Uso
418 1639505 06/2009
Estado FDR
El parmetro Estado FDR del puerto de red (490.8-11) describe el estado del
servicio FDR, tal y como se describe a continuacin.
NOTA: Los valores de estado FDR slo son vlidos cuando el controlador LTM R
se encuentra en condicin de error.
Estado FDR:
Valor Descripcin
0 Listo, IP disponible, sin errores
1 Ninguna respuesta del servidor IP
2 Ninguna respuesta del servidor de parmetros
3 Ningn archivo en el servidor de parmetros
4 Archivo daado en el servidor de parmetros
5 Archivo vaco en el servidor de parmetros
6 Fallo de comunicacin interna (desde el puerto de red al puerto HMI)
7 Error de escritura al copiar los ajustes en el servidor de parmetros
8 Ajustes no vlidos proporcionados por el controlador
9 No hay coincidencia de CRC entre el servidor de parmetros y el controlador
10 IP no vlida
11 IP duplicada
12 FDR desactivado
13 No hay coincidencia en la versin del archivo de parmetros del dispositivo (por ejemplo, cuando
se intenta sustituir un LTM R 08EBD por un LTM R 100 EBD)
Uso
1639505 06/2009 419
Configuracin de la exploracin de E/S
Registros de prioridad alta de mirroring
El controlador LTM R proporciona un bloque de 9 registros contiguos (ubicados en
las direcciones de la 2500 a la 2508) dedicado a explorar en ese mirror los valores
y las funcionalidades de los registros de prioridad alta seleccionados, incluyendo:
Registro Tipo de variable Variables de slo lectura
2500 Palabra Registro de estado mirror
bit 0 Renovacin de tabla de entradas
0 = la tabla se ha ledo en 100 ms
1 = la tabla no se ha ledo en 100 ms
bit 1 Validez de la tabla de entradas
0 = los datos de la tabla no son vlidos
1 = los datos de la tabla son vlidos
bit 2 Cambio de la tabla de entradas
0 = los datos de la tabla no se han cambiado desde la ltima lectura
1 = los datos de la tabla se han cambiado desde la ltima lectura
bits 3-7 (Reservados)
bit 8 Renovacin de la tabla de salidas
0 = la tabla se ha ledo en 100 ms
1 = la tabla no se ha ledo en 100 ms
bit 9 Validez de la tabla de salidas
0 = los datos de la tabla no son vlidos
1 = los datos de la tabla son vlidos
bit 10 Cambio de la tabla de salidas
0 = los datos de la tabla no se han cambiado desde la ltima lectura
1 = los datos de la tabla se han cambiado desde la ltima lectura
bits 11-15 (Reservados)
2501 Palabra (Reservado)
2502 Palabra mirrors Registro 1 de estado del sistema (455)
2503 Palabra mirrors Registro 2 de estado del sistema (456)
2504 Palabra mirrors Estado de entradas lgicas (457)
2505 Palabra Estado de salidas lgicas (458)
2506 Palabra Registro de comandos de salidas lgicas (700)
2507 Palabra Registro de control 1 (704)
2508 Palabra Comando de salida analgica 1 (706)
Uso
420 1639505 06/2009
El controlador LTM R lee los valores de todos los registros de prioridad alta cada
vez que detecta un cambio en un registro de prioridad alta y escribe los valores de
todos los registros de prioridad alta en los registros de mirroring. Los valores del
registro de mirroring se actualizan cada 35 ms en el caso de lectura, y cada 50 ms
para escribir un cambio en el valor de cualquier registro de prioridad alta.
Debido a que los registros de mirroring son contiguos, se puede ejecutar una nica
solicitud de lectura o escritura en bloque Modbus en estos registros. De esta forma,
se elimina la necesidad de hacer solicitudes de lectura/escritura Modbus por
separado directamente a cada registro de prioridad alta.
NOTA: Si intenta configurar la aplicacin para leer registros 455458 adems de
registros contiguos adicionales, utilice diversas conexiones Modbus/TCP de la
siguiente manera:
Utilice una conexin para leer los registros del 2502 al 2505 (455 a 458), y ajuste
el tiempo de exploracin o de consulta a 5 ms (o lo ms rpido posible).
Utilice conexiones adicionales para leer los otros registros contiguos (por
ejemplo, 450454, o 459462) y ajuste el tiempo de exploracin o de consulta
a 20 ms.
Uso
1639505 06/2009 421
Estado mirroring
Estado mirroring es el primer registro, en la direccin 2500, en una secuencia de
ocho registros de mirroring contiguos. Los bits 02 de este registro describen el
estado de los comandos de slo lectura, y los bits 8...10 describen el estado de los
comandos de lectura y escritura.
NOTA: Utilice slo los dos puertos Ethernet para leer valores de bits de registros de
estado mirroring. Si se utiliza el puerto HMI/LTM E se produce un valor constante
no vlido de 0 para cada bit.
Todos los dems registros de estado mirroring, 2502 a 2507, se pueden leer de
forma precisa utilizando el puerto HMI/LTM E o los dos puertos Ethernet.
El registro de estado mirroring est compuesto por los valores de bits siguientes:
Bit Descripcin Valores (booleanos)
Bits de estado de slo lectura (para los registros de prioridad alta 455, 456, 457 y 458):
0 Renovacin: se han ledo los registros de prioridad alta en 100
ms?
0 = los datos se han ledo
1 = los datos no se han ledo
1 Validez: son vlidos los datos? 0 = los datos no son vlidos
1 = los datos son vlidos
2 Cambio: se han cambiado los datos desde la ltima exploracin? 0 = los datos no se han cambiado
1 = se han cambiado
3...7 Reservados
Bits de estado de lectura/escritura (para los registros de prioridad alta 700 y 704):
8 Renovacin: se han ledo los registros de prioridad alta en 100
ms?
0 = los datos se han ledo
1 = los datos no se han ledo
9 Validez: son vlidos los datos? 0 = los datos no son vlidos
1 = los datos son vlidos
10 Cambio: se han cambiado los datos desde la ltima exploracin? 0 = no se han cambiado
1 = se han cambiado
11...15 Reservados
Uso
422 1639505 06/2009
Configurar la exploracin de E/S
La configuracin correcta de la exploracin de E/S de registros depende de:
el tipo de registro
el periodo de exploracin de E/S
el periodo health timeout de la exploracin de E/S
En la tabla siguiente se describen los ajustes recomendados para la exploracin de
E/S y el health timeout de exploracin de E/S para las transacciones de lectura y
escritura para registros de varios tipos:
NOTA: Cualquier ajuste del periodo de exploracin de E/S o del health timeout de
exploracin de E/S, inferior al descrito anteriormente, puede hacer que el
controlador LTM R enve paquetes de excepciones Modbus.
Transaccin Tipo de registro Periodo de
exploracin de
E/S (mnimo)
Health timeout de
exploracin de E/S
(mnimo)
Cualquier combinacin de
100 transacciones de
lectura/escritura
Cualquier registro excepto:
mirroring, FDR o diagnstico
200 ms 500 ms
10 o ms transacciones de
lectura, y 5 o ms
transacciones de escritura
Cualquier registro excepto:
mirroring, FDR o diagnstico
50 ms 200 ms
Transacciones de lectura Registros de mirroring:
rango de direcciones de 2500 a 2505
5 ms 100 ms
Transacciones de escritura Registros de mirroring:
rango de direcciones de 2506 a 2508
50 ms 200 ms
Transacciones de
lectura/escritura
Registros de mirroring:
rango de direcciones para lectura de
2500 a 2505
rango de direcciones para escritura de
2506 a 2508
50 ms 200 ms
Cualquier nmero de
transacciones de lectura
Registros de FDR:
rango de direcciones de 10001 a 10010
200 ms 500 ms
Cualquier nmero de
transacciones de lectura
Registros de diagnstico:
rango de direcciones de 2000 a 2039
1000 ms 2000 ms
Uso
1639505 06/2009 423
IP maestra
Descripcin general
Cada controlador LTM R, como esclavo Modbus, debe configurarse para reconocer
a otro tipo de dispositivo Ethernet (normalmente un PLC) como su maestro Modbus.
El maestro Modbus puede supervisar y controlar el comportamiento del controlador
LTM R.
El controlador LTM R puede mantener hasta ocho conexiones Modbus de forma
simultnea, con uno o varios dispositivos Ethernet. El controlador debera mantener
de forma continua al menos una conexin, denominada conexin virtual
(vase pgina 445) o conector, con el maestro Modbus.
Si todas las conexiones entre el maestro Modbus y el esclavo LTM R fallan, el
controlador LTM R:
Espera un tiempo especfico, el tiempo sobrepasado de prdida de
comunicacin del puerto de red, para establecer una nueva conexin y enviar
mensajes entre el esclavo del controlador y el maestro Modbus.
A continuacin, si no se establece una conexin ni se reciben mensajes, el
controlador asume un estado de recuperacin, definido por el parmetro Puerto
de red-ajuste de recuperacin.
ADVERTENCIA
PRDIDA DE CONTROL
Configure una IP maestra en la red Ethernet.
No utilice una direccin IP distinta a la IP maestra para enviar comandos de
arranque o parada de red al controlador LTM R.
Disee su red Ethernet de forma que bloquee comandos de arranque o parada
de red no autorizados enviados al controlador LTM R.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Uso
424 1639505 06/2009
Conexiones IP maestra prioritarias
Las conexiones entre el controlador LTM R y el maestro Modbus tienen prioridad
sobre las conexiones entre el controlador y otros dispositivos Ethernet.
Despus de que el controlador haya alcanzado el nmero mximo de ocho
conexiones Modbus simultneas, el controlador debe cerrar una conexin existente
para poder abrir una nueva conexin. El controlador cierra las conexiones
existentes en funcin del tiempo de la transaccin ms reciente de una conexin,
cerrando la conexin cuya transaccin ms reciente es la ms antigua.
Sin embargo, todas las conexiones entre el controlador LTM R y el maestro Modbus
se conservan. El controlador no cerrar una conexin con un maestro Modbus para
abrir una nueva.
Configurar la IP maestra
Para permitir que se realicen conexiones a un maestro Modbus, utilice la
herramienta de configuracin de su eleccin para configurar los parmetros
siguientes:
Parmetro Intervalo de ajuste Predeterminado
de fbrica
Ajuste de direccin IP Ethernet maestra (3010-3011) Direcciones vlidas de clase A, B y
C en el rango:
0.0.0.0...223.255.255.255
0.0.0.0
Puerto de red-tiempo sobrepasado de prdida de
comunicaciones (693)
0...9999 s
en incrementos de 0,01 s
2 s
Puerto de red-ajuste de recuperacin (682) En espera
Marcha
O.1, O.2 desactivadas
O.1, O.2 activadas
O.1 desactivada
O.2 desactivada
O.1, O.2
desactivadas
Uso
1639505 06/2009 425
Actualizacin del firmware del puerto de red
Descripcin general
El funcionamiento del puerto de red del controlador LTM R se rige por su firmware
interno. A medida que estn disponibles nuevas versiones de firmware del
controlador LTM R, puede actualizarlo. La actualizacin del firmware de red del
controlador requiere los archivos siguientes:
TeSysT_Ethernet_Upgrade.exe: la aplicacin que instala la actualizacin del
firmware.
App2.out: el archivo de actualizacin del firmware que se va a instalar.
NOTA: Para obtener una copia de estos archivos de actualizacin del firmware,
pngase en contacto con su representante de Schneider Electric.
Actualizar el firmware
Despus de obtener los dos archivos de actualizacin del firmware, mencionados
anteriormente, siga los pasos siguientes:
Paso Descripcin
1 Copie la herramienta de configuracin de actualizacin,
TeSysT_Ethernet_Upgrade.exe, en C:\.
2 Copie el archivo de actualizacin del firmware, App2.out, en C:\.
Nota: Si se indica en las notas de la versin del producto, copie tambin el archivo
prsnlty.ini en C:\.
3 Abra una ventana de MS-DOS y escriba el comando:
cd:\c
4 Verifique que el controlador LTM R tiene una direccin IP.
5 Haga un ping al controlador LTM R introduciendo el comando:
c:\>ping -t <direccin IP del LTM R>
6 Para iniciar la actualizacin del firmware, escriba el comando:
c:\TeSysT_Ethernet_Upgrade.exe <direccin IP del LTM R>
7 Siga las instrucciones que aparecen en la ventana de MS-DOS.
8 Compruebe que:
Los ajustes del conmutador rotatorio del controlador no se han cambiado.
El servidor IP est funcionando.
9 Busque el mensaje siguiente
El proceso de actualizacin se realizar con xito solo si el registro Modbus 62
contiene la nueva versin del firmware Ethernet. Lea el registro 62 para confirmar
que la actualizacin se ha realizado correctamente.
10 Para confirmar la actualizacin del firmware, compruebe el parmetro Puerto de red-
versin de firmware (registro 62).
Uso
426 1639505 06/2009
Diagnstico Ethernet
Descripcin general
El controlador LTM R notifica datos de diagnstico que describen su interfaz de
comunicacin de red Ethernet, que incluye:
Parmetros de datos que describen los siguientes elementos del controlador:
ajustes de direccionamiento IP
procesos de asignacin de direcciones IP
conexiones virtuales
historial de comunicaciones
servicios de comunicacin y su estado
Un parmetro que describe la validez de los datos en cada parmetro de datos.
NOTA: Se recomienda leer los registros de diagnstico cada 1.000 ms.
NOTA: La respuesta a la primera solicitud est formada ntegramente por ceros o
bien por datos antiguos. La respuesta a la segunda solicitud y posteriores contiene
datos de diagnstico actuales del puerto de red.
Validez de diag HW bsico Ethernet
El parmetro Validez de diag HW bsico Ethernet evala y notifica la validez de los
datos de diagnstico de red Ethernet. Un bit de este parmetro representa el estado
de un parmetro de datos de red Ethernet asociado.
Los valores de bit son:
El parmetro Validez de diag HW bsico Ethernet tiene una longitud de 4 bytes y la
direccin de 2000-2001.
Valor Indica que los datos del parmetro son...
0 No vlidos
1 Vlidos
Uso
1639505 06/2009 427
Los bits de este parmetro representan la validez de los siguientes parmetros de
datos Ethernet:
Estado global Ethernet
El parmetro Estado global Ethernet indica el estado de los siguientes servicios
proporcionados por el controlador LTM R:
sustitucin de dispositivo defectuoso (FDR)
gestin de red SNMP
mensajes del puerto Modbus 502
Este parmetro tiene una longitud de 2 bits y la direccin 2002.0-1.
Los valores del parmetro son:
El estado global Ethernet se borra tras el apagado y encendido y tras el reinicio del
controlador.
Bit Describe la validez de los datos de este parmetro...
0 Modo de asignacin de IP Ethernet
1 Nombre de dispositivo Ethernet
2 Contador de mensajes Ethernet MB recibidos
3 Contador de mensajes Ethernet MB enviados
4 Contador de mensajes de error Ethernet MB enviados
5 Contador de servidores Ethernet abiertos
6 Contador de clientes Ethernet abiertos
7 Contador de tramas correctas Ethernet transmitidas
8 Contador de tramas correctas Ethernet recibidas
9 Formato de trama Ethernet
10 Direccin MAC Ethernet
11 Direccin de pasarela Ethernet
12 Mscara de subred Ethernet
13 Direccin IP Ethernet
14 Estado de servicios Ethernet
15 (No aplicable siempre 0)
16 Servicios Ethernet
17 Estado global Ethernet
18...31 (Reservado - siempre 0)
Valor Indica
1 Al menos 1 servicio activado funciona con un error no resuelto.
2 Todos los servicios activados funcionan sin errores.
Uso
428 1639505 06/2009
Validez de servicios Ethernet
El parmetro Validez de servicios Ethernet indica si el controlador LTM R admite el
servicio de mensajera del puerto 502.
NOTA: El puerto 502 se reserva exclusivamente a los mensajes Modbus.
El parmetro Servicios Ethernet admitidos tiene una longitud de 1 bit y la direccin
2003.0.
Los valores del parmetro son:
Estado de servicios Ethernet
El parmetro Estado de servicios Ethernet indica el estado del parmetro Servicios
Ethernet admitidos, por ejemplo, el estado del servicio de mensajera del puerto 502
del controlador.
Este parmetro tiene una longitud de 3 bits y la direccin 2004.0-2.
Los valores del parmetro son:
Estado de servicios Ethernet se borra tras el apagado y encendido y tras el reinicio
del controlador.
Direccin IP Ethernet
El parmetro Direccin IP Ethernet describe la direccin IP asignada al controlador
LTM R mediante el proceso de asignacin de direccin IP (vase pgina 403).
Este parmetro tiene una longitud de 4 bytes y la direccin 2005-2006.
La direccin IP est formada por valores de 4 bytes, en notacin decimal de puntos.
Cada valor de byte es un entero de 000 a 255.
Mscara de subred Ethernet
El parmetro Mscara de subred Ethernet se aplica al valor de Direccin IP Ethernet
para definir la direccin de host del controlador LTM R.
Este parmetro tiene una longitud de 4 bytes y la direccin 2007-2008.
La mscara de subred Ethernet est formada por valores de 4 bytes, en notacin
decimal de puntos. Cada valor de byte es un entero de 000 a 255.
Valor Indica que el servicio de mensajera del puerto 502
0 No se admite
1 Se admite
Valor Indica que el servicio de mensajera del puerto 502 est
1 Inactivo
2 Operativo
Uso
1639505 06/2009 429
Direccin de pasarela Ethernet
El parmetro Direccin de pasarela Ethernet describe la direccin de la pasarela
predeterminada, por ejemplo, el nodo que sirve como punto de acceso a otras redes
para comunicaciones desde o hacia el controlador LTM R.
Este parmetro tiene una longitud de 4 bytes y la direccin 2009-2010.
El parmetro Direccin de pasarela Ethernet est formado por valores de 4 bytes,
en notacin decimal de puntos. Cada valor de byte es un entero de 000 a 255.
Direccin MAC Ethernet
El parmetro Direccin MAC Ethernet describe la direccin de control de acceso a
medios (MAC), o identificador de hardware, asignada de forma exclusiva al
controlador LTM R.
Este parmetro tiene una longitud de 6 bytes y la direccin 2011-2013.
El parmetro Direccin MAC Ethernet est formado por 6 valores hexadecimales,
de 00 a FF.
Uso
430 1639505 06/2009
Tramas Ethernet II
El parmetro Tramas Ethernet II describe los formatos de trama Ethernet admitidos
por el controlador LTM R, por ejemplo:
Capacidad: el dispositivo admite un formato de trama?
Configuracin: el dispositivo est configurado para admitir un formato de
trama?
Operativo: el formato de trama configurado funciona correctamente?
NOTA: El tipo de trama Ethernet, Ethernet II o 802.3 se configura utilizando el
parmetro Ajuste del tipo de trama del puerto de red.
Este parmetro tiene una longitud de 6 bytes y la direccin 2014-2016.
Los datos de tramas Ethernet II se almacenan de la forma siguiente:
Direccin Descripcin Valores
2014.0 Tramas Ethernet II admitidas 0 = no admitido
1 = admitido
2014.1 Receptor de tramas Ethernet II admitido 0 = no admitido
1 = admitido
2014.2 Remitente de tramas Ethernet II admitido 0 = no admitido
1 = admitido
2014.3 Deteccin automtica de Ethernet admitida 0 = no admitido
1 = admitido
2014.4-15 (Reservado) siempre 0
2015.0 Tramas Ethernet II configuradas 0 = no configurado
1 = configurado
2015.1 Receptor de tramas Ethernet II configurado 0 = no configurado
1 = configurado
2015.2 Remitente de tramas Ethernet II configurado 0 = no configurado
1 = configurado
2015.3 Deteccin automtica de Ethernet configurada 0 = no configurado
1 = configurado
2015.4-15 (Reservado) siempre 0
2016.0 Tramas Ethernet II operativas 0 = no operativo
1 = operativo
2016.1 Receptor de tramas Ethernet II operativo 0 = no operativo
1 = operativo
2016.2 Remitente de tramas Ethernet II operativo 0 = no operativo
1 = operativo
2016.3 Deteccin automtica de Ethernet operativa 0 = no operativo
1 = operativo
2016.4-15 (Reservado) siempre 0
Uso
1639505 06/2009 431
Contador de tramas correctas Ethernet recibidas
El parmetro Contador de tramas correctas Ethernet recibidas contiene un recuento
del nmero total de tramas Ethernet que el controlador LTM R ha recibido
correctamente.
Este parmetro tiene una longitud de 4 bytes y la direccin 2017-2018. Se borra tras
el encendido y apagado y tras el reinicio del controlador.
El contador de tramas correctas Ethernet recibidas est compuesto por 4 valores
hexadecimales, de 00 a FF.
Contador de tramas correctas Ethernet transmitidas
El parmetro Contador de tramas correctas Ethernet transmitidas contiene un
recuento del nmero total de tramas Ethernet que el controlador LTM R ha
transmitido correctamente.
Este parmetro tiene una longitud de 4 bytes y la direccin 2019-2020. Se borra tras
el encendido y apagado y tras el reinicio del controlador.
El contador de tramas correctas Ethernet transmitidas est compuesto por 4 valores
hexadecimales, de 00 a FF.
Contador de clientes Ethernet abiertos
El parmetro Contador de clientes Ethernet abiertos contiene un recuento del
nmero de conexiones TCP de cliente abiertas. Se aplica slo a dispositivos con
clientes TCP.
Este parmetro tiene una longitud de 2 bytes y la direccin 2021. Se borra tras el
encendido y apagado y tras el reinicio del controlador.
El contador de clientes Ethernet abiertos est compuesto por 2 valores
hexadecimales, de 00 a FF.
Contador de servidores Ethernet abiertos
El parmetro Contador de servidores Ethernet abiertos contiene un recuento del
nmero de conexiones TCP de servidor abiertas. Se aplica slo a dispositivos con
servidores TCP.
Este parmetro tiene una longitud de 2 bytes y la direccin 2022. Se borra tras el
encendido y apagado y tras el reinicio del controlador.
El contador de servidores Ethernet abiertos est compuesto por 2 valores
hexadecimales, de 00 a FF.
Uso
432 1639505 06/2009
Contador de mensajes de error Ethernet MB enviados
El parmetro Contador de mensajes de error Ethernet MB enviados contiene un
recuento del nmero de:
Paquetes de solicitudes Modbus/TCP con errores en el encabezado recibidas
por el controlador LTM R (no cuenta los errores en las porciones de datos de
paquetes de solicitudes Modbus/TCP)
Modbus/TCP Excepciones debido a una combinacin incorrecta de puerto fsico
e ID de unidad (vase pgina 453)
Este parmetro tiene una longitud de 4 bytes y la direccin 2023-2024. Se borra tras
el encendido y apagado y tras el reinicio del controlador.
Contador de mensajes Ethernet MB enviados
El parmetro Contador de mensajes Ethernet MB enviados contiene el nmero total
de mensajes Modbus, excepto los mensajes de error Modbus, que ha enviado el
controlador LTM R.
Este parmetro tiene una longitud de 4 bytes y la direccin 2025-2026. Se borra tras
el encendido y apagado y tras el reinicio del controlador.
Contador de mensajes Ethernet MB recibidos
El parmetro Contador de mensajes Ethernet MB recibidos contiene el nmero total
de mensajes Modbus que ha recibido el controlador LTM R.
Este parmetro tiene una longitud de 4 bytes y la direccin 2027-2028. Se borra tras
el encendido y apagado y tras el reinicio del controlador.
Nombre de dispositivo Ethernet
El parmetro Nombre de dispositivo Ethernet contiene la cadena de 16 caracteres
utilizada para identificar el controlador LTM R.
Este parmetro tiene una longitud de 16 bytes y la direccin 2029-2036.
Uso
1639505 06/2009 433
Ethernet-capacidad de asignacin IP
El parmetro Ethernet-capacidad de asignacin IP Ethernet describe los orgenes
de direccionamiento IP disponibles para el controlador LTM R. Se puede describir
hasta 4 orgenes de direccionamiento IP distintos.
Este parmetro tiene una longitud de 4 bits y la direccin 2037.0-3.
El parmetro Ethernet-capacidad de asignacin IP almacena los datos de la
siguiente manera:
Direccin Origen de direccionamiento IP
2037.0 Un servidor DHCP que utiliza el nombre de dispositivo definido por
los 2 conmutadores rotatorios.
0 = no disponible
1 = disponible
20378.1 Se obtiene de la direccin MAC. El conmutador rotatorio de
unidades se ajusta en BootP pero no se recibe ninguna direccin IP
del servidor.
0 = no disponible
1 = disponible
2037.2 Se obtiene de la direccin MAC. Ambos conmutadores rotatorios se
ajustan en enteros, pero no se recibe ninguna direccin IP del
servidor DHCP.
0 = no disponible
1 = disponible
2037.3 Parmetros de configuracin almacenados:
Ajuste de direccin IP Ethernet
Ajuste de mscara de subred Ethernet
Ajuste de direccin de pasarela Ethernet
0 = no disponible
1 = disponible
Uso
434 1639505 06/2009
Ethernet-asignacin IP operativa
El parmetro Ethernet-asignacin IP operativa describe la forma en la que se han
asignado las direcciones IP actuales al controlador LTM R. Slo 1 (de 4) origen de
direccin IP distinto puede estar operativo a la vez.
Este parmetro tiene una longitud de 4 bits y la direccin 2038.0-3.
El parmetro Ethernet-asignacin IP operativa almacena los datos de la siguiente
manera:
Direccin Origen de direccionamiento IP
2038.0 Un servidor DHCP que utiliza el nombre de dispositivo definido por
los 2 conmutadores rotatorios.
0 = no operativo
1 = operativo
2038.1 Se obtiene de la direccin MAC. El conmutador rotatorio de
unidades se ajusta en BootP pero no se recibe ninguna direccin IP
del servidor.
0 = no operativo
1 = operativo
2038.2 Se obtiene de la direccin MAC. Ambos conmutadores rotatorios se
ajustan en enteros, pero no se recibe ninguna direccin IP del
servidor DHCP.
0 = no operativo
1 = operativo
2038.3 Parmetros de configuracin almacenados:
Ajuste de direccin IP Ethernet
Ajuste de mscara de subred Ethernet
Ajuste de direccin de pasarela Ethernet
0 = no operativo
1 = operativo
Uso
1639505 06/2009 435
Protocolo simple de administracin de red (SNMP)
Descripcin general
El controlador LTM R incorpora un agente SNMP versin 3.0 que se puede conectar
a y comunicarse con un administrador SNMP mediante el protocolo de transporte
UDP a travs del puerto 161.
Los servicios SNMP son:
Deteccin automtica e identificacin del LTM R por parte de un administrador
SNMP a travs de una red Ethernet.
Comprobacin de autenticidad, por parte del controlador LTM R, de cualquier
administrador SNMP que enva solicitudes al controlador.
Gestin de sucesos, o desviaciones, notificados por el controlador LTM R,
incluida la identificacin de dos administradores SNMP autorizados para recibir
informes.
Compatibilidad total con los parmetros MIB-II (TCP/IP estndar).
NOTA: El acceso a los parmetros SNMP, y la configuracin de estos, slo est
disponible con el software PowerSuite.
Agentes y administradores SNMP
El modelo de administracin SNMP utiliza los trminos y definiciones siguientes:
Administrador: una aplicacin cliente (por ejemplo, ConneXview o un navegador
MIB simple) que se ejecuta en el PC.
Agente: una aplicacin servidor que se ejecuta en un dispositivo de red, en este
caso el controlador LTM R.
Un administrador SNMP se comunica con un agente envindole consultas para la
lectura de datos desde el agente y la escritura de datos en el agente. El
administrador SNMP utiliza UDP para establecer comunicaciones con un agente a
travs de una interfaz Ethernet abierta.
Los agentes tambin pueden iniciar comunicaciones con un administrador enviando
mensajes de desviacin no solicitados, que registran la ocurrencia de sucesos
especficos.
Mensajes SNMP
SNMP admite los siguientes tipos de mensajes entre el administrador y el agente:
Get: el administrador solicita a un agente que enve informacin.
Set: el administrador solicita a un agente que modifique informacin almacenada
por dicho agente.
Response: el cliente responde a una solicitud Get o Set.
Trap: el agente enva un informe no solicitado al administrador para comunicar
que ha ocurrido un suceso.
MIB-II define las propiedades del agente que el administrador puede obtener o
ajustar.
Uso
436 1639505 06/2009
Generacin de informes de desviaciones
Una desviacin es un suceso detectado por un agente que indica:
que ha ocurrido un cambio en el estado del agente, o
que el dispositivo de un administrador no autorizado ha intentado obtener datos
del agente o cambiar datos del mismo.
Puede configurar el agente SNMP del controlador LTM R para que comunique
desviaciones a uno o dos administradores SNMP autorizados. Asimismo, puede
activar o desactivar algunas desviaciones.
El controlador LTM R admite las siguientes desviaciones:
Seguridad
SNMP utiliza nombres de comunidad para proporcionar seguridad contra al acceso
no autorizado a los ajustes de configuracin del controlador LTM R y las notifica-
ciones de desviaciones. Un nombre de comunidad acta como contrasea. Cada
tipo de comunicacin, Get, Set y Trap, se puede configurar por separado con una
contrasea.
Tanto el administrador como el agente deben estar configurados con la misma
contrasea, para un tipo de comunicacin, para permitir que:
el agente acepte solicitudes Get o Set del administrador, y
el administrador acepte notificaciones de desviaciones del agente.
Desviacin Descripcin Configurable en
PowerSuite?
Fallo de autentificacin El agente ha recibido una solicitud de un administrador no
autorizado.
S (activar/desactivar)
Arranque en fro El agente se est reinicializando y puede que su configuracin
cambie.
No (siempre activado)
Enlace descendente Uno de los enlaces de comunicacin del agente ha fallado. No (siempre activado)
Enlace ascendente Uno de los enlaces de comunicacin del agente se ha
encendido.
No (siempre activado)
Arranque en caliente La configuracin del agente ha cambiado. No (siempre activado)
Uso
1639505 06/2009 437
Configurar el servicio SNMP
Si utiliza PowerSuite, puede acceder a los siguientes parmetros relacionados con
SNMP:
Nombre de campo
PowerSuite
Nombre del parmetro Valor
IP address manager 1 Ajuste de direccin 1 de administrador SNMP Ethernet
(3012-3013)
0.0.0.0 a 255.255.255.255
Predeterminado = 0.0.0.0
IP address manager 2 Ajuste de direccin 2 de administrador SNMP Ethernet
(3014-3015)
0.0.0.0 a 255.255.255.255
Predeterminado = 0.0.0.0
System Name
(1)
Ajuste de nombre del sistema SNMP Ethernet (3016-
3031)
LTMRxxExx
System Location
(1)
Ajuste de ubicacin del sistema SNMP Ethernet (3032-
3047)
0...32 caracteres
System Contact
(1)
Ajuste de contacto del sistema SNMP Ethernet (3048-
3063)
0...32 caracteres
Read-Only (Get)
Community Name
Ajuste de obtencin de nombre de comunidad SNMP
Ethernet (3064-3071)
0...16 caracteres;
predeterminado = pblico
Write (Set) Community
Name
Ajuste de nombre de comunidad SNMP Ethernet (3072-
3079)
0...16 caracteres;
predeterminado = privado
Trap Community Name Ajuste de desviacin del nombre de comunidad SNMP
Ethernet (3080-3087)
0...16 caracteres;
predeterminado = pblico
Enable Authentication
Failure Trap?
Activacin del error de autentificacin de la desviacin
SNMP del puerto de red (691.4)
S/No; predeterminado = S
(1) Se recomienda hacer cualquier cambio en los valores de estos parmetros utilizando el software PowerSuite, y
no a travs del administrador SNMP.
Uso
438 1639505 06/2009
Utilizar la herramienta de diagnstico Ethernet ConneXview
Descripcin general
Utilice ConneXview, la herramienta de diagnstico Ethernet desarrollada por
Schneider Electric, para:
Detectar automticamente dispositivos Ethernet, como el controlador LTM R,
conectados a la red Ethernet.
Dibujar automticamente un mapa de red que muestre los dispositivos y enlaces
de comunicacin de su red Ethernet.
Supervisar el rendimiento de su red y dispositivos Ethernet mediante la deteccin
de alarmas de red.
Enviar por correo electrnico avisos de alarmas de red a la persona o personas
que tienen que responder a una alarma.
Ayudarle a diagnosticar y resolver alarmas.
Puede descargar ConneXview desde el sitio web www.schneider-electric.com
(Products and Services/Automation and Control/Product offers/Software tools).
Deteccin de red
ConneXview incorpora una biblioteca de tipos de dispositivos Ethernet. Cuando
ConneXview ejecuta una deteccin de red automtica, busca en su red Ethernet
instancias de cada definicin de tipo de dispositivo de la biblioteca.
NOTA: Para tener la seguridad de que ConneXview detecta el controlador LTM R,
procure aadir los nombres de comunidad SNMP get, set y trap del controlador LTM
R a la lista de SNMP Community Names del cuadro de dilogo Network Discovery
Parameters de ConneXview.
Para abrir este cuadro de dilogo, seleccione Tools Discover Network en
ConneXview.
Consulte las instrucciones de configuracin SNMP (vase pgina 437) de este
manual para los nombres de comunidad get, set y trap del controlador LTM R.
NOTA: En ConneXview versin 2.0, 2.8 o anteriores, tendr que descargar del sitio
web de Schneider Electric dos archivos que conjuntamente definen el tipo de
dispositivo del controlador LTM R y, a continuacin, deber aadirlos a la biblioteca
de dispositivos. La ubicacin predeterminada de la biblioteca de dispositivos es:
"C:\Archivos de programa\Schneider Electric\ConneXview\networks". Los archivos
que tiene que descargar y copiar son:
Ethernet-IMPR.typ
Dual Port Ethernet IMPR.jpg
Uso
1639505 06/2009 439
Despus de ejecutar la deteccin de red automtica, ConneXview muestra el mapa
de red resultante:
NOTA: Si su topologa de red es bucle o encadenamiento, ConneXview lo mostrar
como topologa estrella, tal y como se ha descrito anteriormente.
Uso
440 1639505 06/2009
Supervisar la red Ethernet
Utilice ConneXview para visualizar el estado de la red en tiempo real, as como para
detectar, solucionar y resolver alarmas de red. ConneXview muestra:
Un mapa de red con colores que muestra de forma dinmica el estado de las
alarmas o las propiedades del dispositivo seleccionado.
Una lista cronolgica de los sucesos de la red, en distintos colores segn la
gravedad, que incluye alarmas, advertencias y otros sucesos significativos.
Una herramienta de asistencia de red que ofrece ayuda a la hora de diagnosticar
y resolver alarmas y advertencias.
ConneXview muestra la siguiente interfaz para la supervisin de la red:
Uso
1639505 06/2009 441
7.7
Utilizar la red de comunicacin Modbus
/TCP
Descripcin general
En esta seccin se describe cmo utilizar el controlador en una red Modbus
/TCP.
(1) Para ms informacin, consulte NEMA ICS 1.1 (ltima edicin), "Safety
Guidelines for the Application, Installation, and Maintenance of Solid State Control"
(Directrices de seguridad para la aplicacin, la instalacin y el mantenimiento del
control de estado esttico).
ADVERTENCIA
PRDIDA DE CONTROL
El diseador del esquema de control debe tener en cuenta los modos de fallo
de rutas de control posibles y, para ciertas funciones crticas, proporcionar los
medios para lograr un estado seguro durante y despus de un fallo de ruta.
Ejemplos de funciones crticas de control son la parada de emergencia y la
parada de sobrerrecorrido.
Para las funciones crticas de control deben proporcionarse rutas de control
separadas o redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicacin.
Deben tenerse en cuenta las implicaciones de retardos o fallos de transmisin
no anticipados del enlace
(1)
.
Cada implementacin de un controlador LTM R debe probarse de forma
individual y exhaustiva para comprobar su funcionamiento correcto antes de
ponerse en servicio.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Uso
442 1639505 06/2009
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
ADVERTENCIA
REARRANQUE INESPERADO DEL MOTOR
Compruebe que el software de aplicacin de PLC:
Tenga en cuenta los cambios de control local a control a distancia.
Gestione de forma adecuada los comandos de control del motor al efectuar
estos cambios.
Al seleccionar los canales de control de red, y en funcin de la configuracin del
protocolo de comunicacin, el controlador LTM R puede tener en cuenta el ltimo
estado conocido de los comandos de control del motor procedentes del PLC y
provocar el rearranque automtico del motor.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Principio del protocolo Modbus
/TCP
443
Configuracin de la comunicacin Ethernet del puerto de red 446
Comandos Borrar de los parmetros de comunicacin 449
Control y supervisin simplificadas 452
Solicitudes Modbus
/TCP
453
Gestin de excepciones Modbus 454
Variables de mapa de usuario (Registros indirectos definidos por el usuario) 455
Mapa de registros (Organizacin de variables de comunicacin) 457
Formatos de los datos 459
Tipos de datos 461
Variables de identificacin 471
Variables histricas 472
Variables de supervisin 482
Variables de configuracin 495
Variables de comandos 508
Variables de mapa de usuario 510
Variables de lgica personalizada 511
Registros de mirroring 512
Uso
1639505 06/2009 443
Principio del protocolo Modbus
/TCP
Descripcin general
El protocolo Modbus/TCP es un protocolo maestro-esclavo:
1 Maestro (PLC, PC o mdulo de comunicaciones)
2 Cable Ethernet de par trenzado apantallado/sin apantallar de categora 5 recto o cruzado
con conector RJ45
Slo un dispositivo puede transmitir en una direccin a travs de un segmento en
cualquier momento.
El maestro gestiona e inicia el intercambio. Por turnos, interroga a cada uno de los
esclavos. Ningn esclavo puede enviar un mensaje a no ser que se le invite a
hacerlo.
El maestro repite la pregunta cuando se produce un intercambio incorrecto, y
declara ausente al esclavo interrogado si no se recibe una respuesta dentro de un
periodo de tiempo dado.
Si el esclavo no entiende el mensaje, no ejecuta ninguna accin. Enva una
respuesta de excepcin al maestro cuando un mensaje se entiende pero contiene
errores, o cuando el esclavo no puede tratar la solicitud (por ejemplo, debido a
problemas de recursos). El maestro puede transmitir o no la solicitud.
NOTA: Para obtener ms informacin sobre los cdigos de funcin Modbus, visite
el sitio web siguiente:
http://modbus.org/specs.php
Uso
444 1639505 06/2009
Dilogos de Modbus/TCP
Modbus/TCP slo admite dilogos de unidifusin, formados por solicitudes hechas
por un maestro a un esclavo y la respuesta del esclavo.
Las comunicaciones directas esclavo-esclavo no son posibles. Para la
comunicacin esclavo-esclavo, el maestro debe interrogar a un esclavo y enviar los
datos recibidos al otro esclavo.
Mensajes Modbus/TCP
Modbus/TCP es el protocolo Modbus encapsulado en TCP. El protocolo de
comunicaciones Modbus/TCP combina:
el protocolo de capa de la aplicacin Modbus (capa 7 del modelo ISO), que
proporciona la estructura de los mensajes para organizar e interpretar los datos,
y
los protocolos de capa de transporte TCP/IP (capa 4 de la pila TCP/IP) que
proporcionan un medio de transmisin fiable para las comunicaciones entre
dispositivos en una red Ethernet.
La trama TCP, con datos Modbus integrados, se enva a travs de TCP al puerto
de sistema 502, que est reservado de forma exclusiva para las aplicaciones
Modbus, y se aade a un paquete de datos Ethernet TCP/IP para la transmisin en
la red.
En el siguiente diagrama se ilustra la construccin de un paquete de datos Ethernet
TCP/IP:
Uso
1639505 06/2009 445
Conexiones virtuales
Aunque pueden haber 1 o 2 conexiones fsicas entre un maestro y un esclavo, en
funcin del tipo de red, (estrella (vase pgina 292), encadenamiento
(vase pgina 293) o anillo (vase pgina 294)), Modbus/TCP admite la utilizacin
de diversas conexiones virtuales.
Una conexin virtual, o conector, combina:
la direccin IP del cliente (por ejemplo, el maestro Modbus/TCP)
un puerto nico en el cliente
la direccin IP del servidor (el esclavo del controlador LTM R)
un puerto nico en el servidor
el protocolo TCP
Las conexiones virtuales mltiples permiten varias transacciones simultneas (en
lugar de en serie) entre el maestro y el esclavo.
Modbus/TCP admite diversos tipos de transacciones cliente/servidor simultneas:
Tipo de transaccin Lmites en la cantidad de conexiones virtuales simultneas
Modbus Ocho como mximo
Notas:
Si se crea una nueva conexin cuando ya existen ocho conexiones, la conexin nueva
reemplaza a la conexin existente, cuya transaccin ms reciente es la ms antigua.
Puede identificar una conexin como conexin IP maestra, con lo que evitar que esta
conexin se reemplace automticamente cuando se sobrepase el nmero mximo de
conexiones.
SNMP Ilimitado
FDR Una como mximo
FTP Una como mnimo
Uso
446 1639505 06/2009
Configuracin de la comunicacin Ethernet del puerto de red
Parmetros de comunicacin
Antes de iniciar la comunicacin del puerto de red, configure los siguientes servicios
y ajustes de comunicacin Ethernet:
Ajuste de direccin IP maestra
Ajuste de tipo de trama
Ajustes de direccionamiento IP almacenado
Puerto de red-ajuste endian
Servicio de sustitucin de dispositivo defectuoso (FDR)
Servicio SNMP
Ajustes de prdida de comunicacin
Configuracin mediante puerto de red-activacin (601.10)
NOTA: Slo el software PowerSuite puede configurar todos estos servicios y
ajustes. Los otros dispositivos HMI pueden configurar todos los ajustes y servicios,
excepto SNMP.
Ajuste de direccin IP maestra
Modbus/TCP es un protocolo maestro-esclavo. Para que el controlador se pueda
comunicar con el maestro Modbus/TCP (PLC), el controlador debe conocer la
direccin IP del dispositivo maestro.
Para introducir la direccin IP del dispositivo maestro, configure el parmetro Ajuste
de direccin IP Ethernet maestra. Este parmetro est formado por cuatro valores
enteros, de 0 a 255, separados por puntos (xxx.xxx.xxx.xxx).
Ajuste de tipo de trama
Configure el parmetro Ajuste del tipo de trama del puerto de red seleccionando un
tipo de trama Ethernet:
Ethernet II (Ajuste de fbrica)
802.3
Uso
1639505 06/2009 447
Ajustes de direccionamiento IP
El controlador LTM R debe tener asignados ajustes de direccin IP nicos
(incluyendo una direccin IP, una mscara de subred y una direccin de pasarela)
para poder comunicarse a travs de una red Ethernet. La posicin de los dos
conmutadores rotatorios del controlador determina el origen de los ajustes de
direccin IP del controlador (vase pgina 403), que puede ser:
un servidor DHCP
un servidor BootP
la direccin MAC del controlador
los ajustes de la direccin IP almacenada
Si el conmutador rotatorio de unidades del controlador se ajusta en Stored IP, el
controlador aplicar sus ajustes de direccin IP almacenada (vase pgina 406).
Para introducir los ajustes de direccin IP almacenada del controlador LTM R,
configure los parmetros siguientes:
Ajuste de direccin IP Ethernet
Ajuste de mscara de subred Ethernet
Ajuste de direccin de pasarela Ethernet
Estos parmetros estn formados por cuatro valores enteros, de 0 a 255, separados
por puntos (xxx.xxx.xxx.xxx).
Puerto de red-ajuste endian
Puerto de red-ajuste endian permite alternar las 2 palabras de una palabra doble.
0 = la palabra menos significativa primero (little endian)
1 = la palabra ms significativa primero (big endian, ajuste de fbrica)
Servicio de sustitucin de dispositivo defectuoso
El servicio de sustitucin de dispositivo defectuoso (vase pgina 411) (FDR)
almacena los parmetros de funcionamiento del controlador LTM R en un servidor a
distancia y, si el controlador se avera y se sustituye, enva al controlador de sustitucin
una copia de los parmetros de funcionamiento del dispositivo original.
Para garantizar que el servidor siempre contiene una copia precisa y actualizada de los
parmetros de funcionamiento del controlador, el servicio FDR se puede configurar para
que haga una copia de seguridad automtica de estos parmetros en el servidor FDR.
Para activar la copia de seguridad automtica de los parmetros de funcionamiento del
controlador en el servidor FDR, configure los parmetros siguientes:
Parmetro Activacin de la copia de seguridad automtica FDR del puerto de red Se
puede ajustar en:
sin copia de seguridad automtica
copia de seguridad automtica (copia los parmetros del controlador en el
servidor FDR)
Parmetro Intervalo del controlador FDR del puerto de red: el tiempo, en segundos,
entre las transmisiones de copia de seguridad automtica.
Rango = 1...65535 s
Predeterminado = 120 s
Uso
448 1639505 06/2009
Servicio SNMP
El controlador LTM R admite el protocolo simple de administracin de red
(vase pgina 435) (SNMP). El controlador LTM R cuenta con un agente SNMP
configurable que puede comunicarse con hasta dos administradores SNMP.
NOTA: Los parmetros SNMP slo se pueden configurar utilizando el software
PowerSuite.
Consulte el tema Configurar el servicio SNMP (vase pgina 437) para obtener
ms informacin sobre la configuracin de los parmetros SNMP.
Ajustes de prdida de comunicaciones del puerto de red
Configure los parmetros siguientes para determinar de qu manera el controlador
LTM R gestionar la prdida de comunicacin con el PLC:
Puerto de red-tiempo sobrepasado de prdida de comunicaciones: el periodo de
tiempo durante el que se debe perder la comunicacin con el PLC antes de que
el controlador genere un fallo o una advertencia.
Rango = 0...9999 s
Incrementos = 0,01 s
Predeterminado = 2 s
Puerto de red-ajuste de recuperacin: determina, junto con el modo de funciona-
miento (vase pgina 198) del controlador, el comportamiento de las salidas
lgicas 1 y 2, cuando se pierde la comunicacin con el PLC. Para obtener ms
informacin, consulte la explicacin que se facilita en Condicin de recuperacin
(vase pgina 63). Los valores son:
En espera
Marcha
O.1, O.2 desactivadas
O.1, O.2 activadas
O.1 activada
O.2 activada
El valor predeterminado es O.1, O.2 desactivadas.
Puerto de red-activacin de fallo comunica un fallo de red despus de que el
parmetro Puerto de red-tiempo sobrepasado de prdida de comunicaciones
haya expirado.
Puerto de red-activacin de advertencia: comunica una advertencia de red
despus de que el parmetro Puerto de red-tiempo sobrepasado de prdida de
comunicaciones haya expirado.
Uso
1639505 06/2009 449
Comandos Borrar de los parmetros de comunicacin
Descripcin general de los comandos Borrar
Puede borrar parmetros de comunicacin de la forma siguiente:
Utilizando los conmutadores rotatorios del LTM R para borrar los ajustes de
direccionamiento IP.
Utilizando los siguientes comandos basados en parmetros:
Borrar todo-comando (705.0)
Borrar configuracin de puerto de red-comando (705.4)
Borrar IP utilizando el conmutador rotatorio
Para borrar los ajustes de direccionamiento IP, ajuste el conmutador rotatorio
derecho, o conmutador de unidades, del controlador LTM R en Clear IP (vea a
continuacin):
De esta forma, se borran los parmetros siguientes:
Direccin IP Ethernet
Mscara de subred Ethernet
Direccin de pasarela Ethernet
La posicin del conmutador izquierdo, o de decenas, no afecta a la funcin Clear IP.
Despus de borrar los parmetros de direccionamiento IP, se debe apagar y
encender el controlador LTM R para que obtenga nuevos parmetros de direccio-
namiento IP (vase pgina 403).
Uso
450 1639505 06/2009
Borrar todo-comando (705.0)
Si desea cambiar la configuracin del controlador LTM R, es posible que desee
borrar todos los parmetros existentes y establecer unos nuevos para el
controlador.
Para borrar todos los parmetros, ajuste el registro 705.0 a 1.
De esta forma, el controlador entra forzosamente en modo de configuracin. Se
debe apagar y encender el dispositivo para reiniciar correctamente en este modo.
De esta forma, el controlador puede obtener los nuevos valores para los parmetros
borrados.
Al borrar todos los parmetros, tambin se pierden las caractersticas estticas.
Despus de ejecutar Borrar todo-comando, los nicos parmetros que no se borran
son:
Motor-nmero de arranques L01
Motor-nmero de arranques L02
Controlador-temperatura interna mx.
Borrar histricos-comando (705.1)
Para borrar los parmetros de histricos, ajuste el registro 705.1 a 1.
Los parmetros de histricos se borran sin que el controlador LTM R tenga que
entrar forzosamente en modo de configuracin. Las caractersticas estticas se
conservan.
Despus de ejecutar Borrar histricos-comando, los nicos parmetros que no se
borran son:
Motor-nmero de arranques L01
Motor-nmero de arranques L02
Controlador-temperatura interna mx.
Borrar nivel de capacidad trmica-comando (705.2)
Para borrar los parmetros de la memoria trmica, ajuste el registro 705.2 a 1.
De esta forma, se borran los parmetros siguientes:
Nivel de capacidad trmica
Ciclo rpido-tiempo sobrepasado de bloqueo
Los parmetros de la memoria trmica se borran sin que el controlador LTM R
tenga que entrar forzosamente en modo de configuracin. Las caractersticas
estticas se conservan.
NOTA: Este bit se puede escribir en cualquier momento, incluso cuando el motor
est en marcha.
Si desea obtener ms informacin sobre el Borrar nivel de capacidad trmica-
comando, consulte Rearme para rearranque de emergencia, pgina 93.
Uso
1639505 06/2009 451
Borrar configuracin del controlador-comando (705.3)
Borrar configuracin del controlador-comando restaura los valores de proteccin
del controlador LTM R a sus ajustes de fbrica (tiempo sobrepasado y umbrales).
Para borrar todos los parmetros de configuracin del controlador, ajuste el registro
705.3 a 1.
Los ajustes siguientes no se borran con este comando:
Caractersticas del controlador
Conexiones (CT, sensor de temperatura y parmetros de E/S)
Modo de funcionamiento
Los parmetros de configuracin del controlador se borran sin que el controlador
tenga que entrar forzosamente en modo de configuracin. Las caractersticas
estticas se conservan.
Borrar configuracin de puerto de red-comando (705.4)
Borrar configuracin de puerto de red-comando restaura los valores del puerto de
red a sus ajustes de fbrica (direccin, etctera).
Para borrar todos los parmetros de configuracin del controlador, ajuste el registro
705.4 a 1.
Los parmetros de configuracin del controlador se borran sin que el controlador
tenga que entrar forzosamente en modo de configuracin. Las caractersticas
estticas se conservan. Slo la comunicacin de red deja de ser efectiva.
Despus de borrar los parmetros de direccionamiento IP, se debe apagar y
encender el controlador LTM R para que obtenga nuevos parmetros de direccio-
namiento IP (vase pgina 403).
Uso
452 1639505 06/2009
Control y supervisin simplificadas
Descripcin general
A continuacin se muestra un ejemplo de los registros principales que controlan y
supervisan un Controlador de gestin de motores.
Registros para simplificar el funcionamiento
En la siguiente ilustracin se proporciona informacin de configuracin bsica,
mediante los siguientes registros: configuracin, control y supervisin (estado del
sistema, mediciones, fallos y advertencias, acuse).
Uso
1639505 06/2009 453
Solicitudes Modbus
/TCP
Solicitudes Modbus/TCP
Puede utilizar todos los puertos fsicos (el puerto LTM E/HMI y cualquiera de los dos
puertos de comunicaciones Ethernet) para enviar y recibir solicitudes Modbus/TCP.
Sin embargo, las funciones de comunicaciones especficas slo se pueden ejecutar
utilizando combinaciones especficas de:
puerto fsico
ID de unidad
NOTA: Si no se utiliza la combinacin correcta de puerto fsico e ID de unidad, el
controlador LTM R informar de una excepcin Modbus/TCP.
Modbus/TCP admite las solicitudes siguientes, las cuales se pueden ejecutar
utilizando los puertos fsicos y los cdigos de ID de unidad que se especifican a
continuacin:
El nmero mximo de registros por solicitud est limitado a 100.
NOTA: Para obtener ms informacin sobre los cdigos de funcin Modbus, visite
el sitio web siguiente:
http://modbus.org/specs.php
Cdigo de
funcin/(subcdigo)
Descripcin de la solicitud
Utilizando estas combinaciones de puerto e ID de
unidad...
Puertos Ethernet Puerto LTM E/HMI
3/- Leer N palabras de salida (varios registros) ID de unidad = 0 a 254 Direccin Modbus = 1 o 248
6/- Escribir 1 palabra de salida (un nico registro) ID de unidad = 0 a 254 Direccin Modbus = 1 o 248
8/22 Leer o borrar datos de diagnstico ID de unidad = 255 (No disponible)
16/- Escribir N palabras de salida (varios registros) ID de unidad = 0 a 254 Direccin Modbus = 1 o 248
23/- Leer/escribir varios registros ID de unidad = 0 a 254 Direccin Modbus = 1 o 248
43/14 Leer identificacin (registro de identificacin) (Reservado) Direccin Modbus = 1 a 248
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
Sea precavido si planea utilizar este dispositivo en una red Modbus que emplea la
funcin de difusin.
Este dispositivo tiene un gran nmero de registros que no se deben modificar
durante el funcionamiento normal. La funcin de difusin podra escribir por
accidente estos registros y ocasionar que el producto funcionara de manera
imprevista y no deseada.
Para obtener ms informacin, consulte la lista de variables de comunicacin.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Uso
454 1639505 06/2009
Gestin de excepciones Modbus
Descripcin general
El controlador LTM R normalmente sigue los criterios Modbus para la Gestin de
excepciones.
Se aplican 3 casos especiales al controlador LTM R:
Registros de campo de bits
Cdigo de excepcin 02 Illegal data address (Direccin de datos no vlida)
Cdigo de excepcin 03 Illegal data value (Valor de datos no vlido)
Registros de campo de bits
Algunos registros del Mapa de registros son campos de bits. En funcin del estado
del controlador LTM R, algunos bits de los mencionados registros no sern de
escritura. En ese caso, el controlador LTM R no permitir escribir en esos bits por
lo que no se devolver ningn cdigo de excepcin. Por ejemplo, si el controlador
LTM R se encuentra fuera del estado Config Sis, los bits que slo se puedan escribir
en modo de configuracin se ignorarn. Sin embargo, se dar el estado de escritura
en los bits no limitados por el controlador LTM R.
Cdigo de excepcin 02 Illegal data address (Direccin de datos no vlida)
Por lo general, el controlador LTM R devolver un cdigo de excepcin de direccin
de datos no vlida si la direccin se encuentra fuera del rango o es inaccesible. En
concreto, el controlador LTM R devolver una direccin de datos no vlida si:
Se enva una solicitud de escritura a un registro de slo lectura.
El permiso para escribir un registro no se concede debido al estado del
controlador LTM R: se da este caso, por ejemplo, cuando un registro que slo se
puede escribir en modo de configuracin se escribe mientras el controlador LTM
R se encuentra fuera del estado Config Sis.
Cdigo de excepcin 03 Illegal data value (Valor de datos no vlido)
En general, el controlador LTM R devolver un cdigo de excepcin de valor de
datos no vlido si hay un problema con la estructura del mensaje, como una longitud
no vlida. El controlador LTM R utilizar tambin este cdigo de excepcin si:
Los datos que se tienen que escribir se encuentran fuera del rango (para
registros de campos de bits y registros estndar): se da este caso si se enva una
solicitud de escritura de 100 a un registro de L/E con un rango de 0 a 50.
Un bit o registro reservado se escribe en un valor distinto a 0.
El parmetro Motor-comando de baja velocidad (bit 704.6) se activa si el modo
del controlador del motor seleccionado no es un modo de funcionamiento de dos
velocidades.
Uso
1639505 06/2009 455
Variables de mapa de usuario (Registros indirectos definidos por el usuario)
Descripcin general
Las variables de mapa de usuario estn diseadas para optimizar el acceso a
diversos registros no contiguos a travs de una sola solicitud.
Puede definir diversas reas de lectura y escritura.
Variables de mapa de usuario
Las variables de mapa de usuario se dividen en 2 grupos:
El grupo Mapa de usuario-direcciones se utiliza para seleccionar una lista de
direcciones para leer o escribir. Puede considerarse como un rea de configuracin.
El grupo Mapa de usuario-valores se utiliza para leer o escribir valores asociados a
direcciones configuradas en el rea Mapa de usuario-direcciones.
La lectura o escritura del registro 900 permite leer o escribir la direccin de
registro definida en el registro 800.
La lectura o escritura del registro 901 permite leer o escribir la direccin de
registro definida en el registro 801.
Mapa de usuario-direcciones 800 a 898
Mapa de usuario-valores 900 a 998
Uso
456 1639505 06/2009
Ejemplo de utilizacin
La configuracin de Mapa de usuario-direcciones que se muestra a continuacin es
un ejemplo de configuracin de Mapa de usuario-direcciones para acceder a
registros no contiguos:
Con esta configuracin, se puede acceder a la informacin de supervisin con una
sola solicitud de lectura a travs de las direcciones de registro 900 a 906.
La configuracin y los comandos pueden escribirse con un solo proceso de
escritura utilizando los registros 950 a 952.
Registro de Mapa de usuario-
direcciones
Valor configurado Registro
800 452 Registro de fallos 1
801 453 Registro de fallos 2
802 461 Registro de advertencias 1
803 462 Registro de advertencias 2
804 450 Mnimo-tiempo de espera
805 500 Corriente media (0,01 A) MSW
806 501 Corriente media (0,01 A) LSW
850 651 HMI-registro 1 de elementos de visualizacin
851 654 HMI-registro 2 de elementos de visualizacin
852 705 Registro de control 2
Uso
1639505 06/2009 457
Mapa de registros (Organizacin de variables de comunicacin)
Introduccin
Las variables de comunicacin se muestran en tablas, en funcin del grupo (identifi-
cacin, histricos o supervisin) al que pertenecen. Estn asociadas con un
controlador LTM R, que puede tener o no conectado un mdulo de expansin
LTM E.
Grupos de variables de comunicacin
Las variables de comunicacin estn agrupadas segn los criterios siguientes:
Estructura de la tabla
Las variables de comunicacin se presentan en tablas de 4 columnas:
Nota
La columna Nota proporciona un cdigo para informacin adicional.
Existen variables sin cdigo para todas las configuraciones de hardware, y sin
restricciones funcionales.
Grupos de variables Registros
Variables de identificacin 00 a 99
Variables histricas 100 a 449
Variables de supervisin 450 a 539
Variables de configuracin 540 a 699
Variables de comandos 700 a 799
Variables de mapa de usuario 800 a 999
Variables de lgica personalizada 1200 a 1399
Variables de supervisin ampliada para comunicacin 2000 a 2499
Registros de prioridad alta de mirroring 2500 a 2999
Variables de configuracin ampliada para comunicacin 3000 a 3499
Estado FDR de supervisin ampliada 10001 a 10010
Columna 1
Registro (en formato
decimal)
Columna 2
Tipo de variable (consulte
Formatos de los datos,
pgina 459)
Columna 3
Nombre de la variable y
acceso a travs de
solicitudes Modbus de slo
lectura o de lectura/escritura
Columna 4
Nota: Cdigo para
informacin adicional
Uso
458 1639505 06/2009
El cdigo puede ser:
Numrico (1 a 9), para combinaciones especficas de hardware.
Alfabtico (A a Z), para comportamientos especficos del sistema.
Direcciones sin utilizar
Las direcciones sin utilizar se pueden clasificar en 3 categoras:
Sin significado, en las tablas de slo lectura, significa que debe ignorar el valor
ledo, tanto si es igual a 0 como si no.
Reservado, en las tablas de lectura/escritura, significa que debe escribir 0 en
estas variables.
Olvidado, significa que las solicitudes de lectura o escritura se han rechazado,
que esas direcciones no son accesibles en absoluto.
Si la nota es... Entonces la variable est disponible para
1 La combinacin LTM R + LTM EV40
2 - 9 No se utiliza
Si la nota es... Entonces...
A
La variable slo se puede escribir cuando el motor est parado
(1)
.
B La variable slo se puede escribir en modo de configuracin (por ejemplo, caractersticas
estticas)
(1)
.
C
La variable slo se puede escribir cuando no hay fallos
(1)
.
D Si los bits de Comando de copia de seguridad de datos FDR (705.5) y Comando de
restauracin de datos FDR (705.6) se ajustan en 1 de forma simultnea, se ejecuta
Comando de restauracin de datos FDR.
E - Z No se utiliza
(1) Las restricciones A, B, C y D slo se aplican a los bits, no a los registros enteros. Si intenta escribir un valor
cuando se aplica una restriccin, el bit no se cambiar y no se devolver ningn cdigo de excepcin. Los cdigos
de excepcin se devuelven a nivel de registro, no a nivel de bit.
Uso
1639505 06/2009 459
Formatos de los datos
Descripcin general
El formato de los datos de una variable de comunicacin puede ser entero, Palabra
o Palabra[n], como se describe a continuacin. Para obtener ms informacin
acerca del tamao y formato de una variable, consulte pgina 461.
Entero (Int, UInt, DInt, IDInt)
Los enteros se clasifican en las siguientes categoras:
Int: entero con signo, ocupa un registro (16 bits)
UInt: entero sin signo, ocupa un registro (16 bits)
DInt: entero con signo doble, ocupa 2 registros (32 bits)
UDInt: entero sin signo doble, ocupa 2 registros (32 bits)
En todas las variables de tipo entero, el nombre de la variable se completa con su
unidad o formato, si es necesario.
Ejemplo:
Direccin 474, UInt, Frecuencia (x 0,01 Hz).
Palabra
Palabra: conjunto de 16 bits, en el que cada bit o grupo de bits representa datos de
comandos, supervisin o configuracin.
Ejemplo:
Direccin 455, Palabra, Registro 1 de estado del sistema
Bit 0 Sistema-listo
Bit 1 Sistema-activado
Bit 2 Sistema-fallo
Bit 3 Sistema-advertencia
Bit 4 Sistema-disparado
Bit 5 Fallo-reinicio autorizado
Bit 6 (Sin significado)
Bit 7 Motor-en marcha
Bits 8-13 Motor-relacin de corriente media
Bit 14 Control mediante HMI
Bit 15 Motor-en arranque (en curso)
Uso
460 1639505 06/2009
Palabra[n]
Palabra[n]: datos codificados en registros contiguos.
Ejemplos:
Direcciones 64 a 69, Palabra[6], Controlador-referencia comercial (consulte
DT_CommercialReference).
Direcciones 655 a 658, Palabra[4], Fecha y hora-ajuste (consulte DT_DateTime).
Uso
1639505 06/2009 461
Tipos de datos
Descripcin general
Los tipos de datos son formatos de variable especficos que se utilizan para
complementar la descripcin de los formatos internos (por ejemplo, en caso de una
estructura o de una enumeracin). El formato genrico de los tipos de datos es
DT_xxx.
Lista de tipos de datos
Esta es una lista de los tipos de datos de uso ms comn:
DT_ACInputSetting
DT_CommercialReference
DT_DateTime
DT_ExtBaudRate
DT_ExtParity
DT_FaultCode
DT_FirmwareVersion
DT_Language5
DT_OutputFallbackStrategy
DT_PhaseNumber
DT_ResetMode
DT_WarningCode
A continuacin se describen estos tipos de datos.
DT_ACInputSetting
El formato DT_ACInputSetting es una enumeracin que mejora la deteccin de
entradas de CA:
Valor Descripcin
0 Ninguno (predeterminado)
1 < 170 V 50 Hz
2 < 170 V 60 Hz
3 > 170 V 50 Hz
4 > 170 V 60 Hz
Uso
462 1639505 06/2009
DT_CommercialReference
El formatoDT_CommercialReference es Palabra[6] e indica una referencia
comercial:
Ejemplo:
Direcciones 64 a 69, Palabra[6], Controlador-referencia comercial.
Si Controlador-referencia comercial = LTM R:
Registro MSB LSB
Registro N Carcter 1 Carcter 2
Registro N+1 Carcter 3 Carcter 4
Registro N+2 Carcter 5 Carcter 6
Registro N+3 Carcter 7 Carcter 8
Registro N+4 Carcter 9 Carcter 10
Registro N+5 Carcter 11 Carcter 12
Registro MSB LSB
64 L T
65 M (espacio)
66 R
67
68
69
Uso
1639505 06/2009 463
DT_DateTime
El formatoDT_DateTime es Palabra[4] e indica la fecha y la hora:
Donde:
S = segundo
El formato es 2 dgitos BCD.
El intervalo de valores es [00-59] en BCD.
0 = sin utilizar
H = hora
El formato es 2 dgitos BCD.
El intervalo de valores es [00-23] en BCD.
m = minuto
El formato es 2 dgitos BCD.
El intervalo de valores es [00-59] en BCD.
M = mes
El formato es 2 dgitos BCD.
El intervalo de valores es [01-12] en BCD.
D = da
El formato es 2 dgitos BCD.
El intervalo de valores es (en BCD):
[01-31] para los meses 01, 03, 05, 07, 08, 10, 12
[01-30] para los meses 04, 06, 09, 11
[01-29] para el mes 02 en un ao bisiesto
[01-28] para el mes 02 en un ao no bisiesto
A = ao
El formato es 4 dgitos decimales de codificacin en binario (BCD).
El intervalo de valores es [2006-2099] en BCD.
El formato de entrada de datos y el intervalo de valores son:
Ejemplo:
Direcciones 655 a 658, Palabra[4], Fecha y hora-ajuste.
Registro 15 12 11 8 7 4 3 0
Registro N S S 0 0
Registro N+1 H H m m
Registro N+2 M M D D
Registro N+3 A A A A
Formato de entrada de
datos
DT#AAAA-MM-DD-HH:mm:ss
Valor mnimo DT#2006-01-01:00:00:00 1 de enero de 2006
Valor mximo DT#2099-12-31-23:59:59 31 de diciembre de 2099
Nota: Si proporciona valores fuera de los lmites, el sistema devolver un error.
Uso
464 1639505 06/2009
Si la fecha es 4 de septiembre de 2008 a las 7 a.m., 50 minutos y 32 segundos:
Con formato de entrada de datos: DT#2008-09-04-07:50:32.
DT_ExtBaudRate
DT_ExtbaudRate depende del bus utilizado:
El formato DT_ModbusExtBaudRate es una enumeracin de las velocidades de
transmisin en baudios posibles con la red Modbus:
El formato DT_ProfibusExtBaudRate es una enumeracin de las velocidades de
transmisin en baudios posibles con la red Profibus:
El formato DT_DeviceNetExtBaudRate es una enumeracin de las velocidades
de transmisin en baudios posibles con la red DeviceNet:
Registro 15 12 11 8 7 4 3 0
655 3 2 0 0
656 0 7 5 0
657 0 9 0 4
658 2 0 0 8
Valor Descripcin
1200 1200 baudios
2400 2400 baudios
4800 4800 baudios
9600 9600 baudios
19200 19.200 baudios
65535 Deteccin automtica (predeterminado)
Valor Descripcin
65535 Transmisin en baudios automtica (predeterminado)
Valor Descripcin
0 125 kbaudios
1 250 kbaudios
2 500 kbaudios
3 Transmisin en baudios automtica (predeterminado)
Uso
1639505 06/2009 465
El formato DT_CANopenExtBaudRate es una enumeracin de las velocidades de
transmisin en baudios posibles con la red CANopen:
DT_ExtParity
DT_ExtParity depende del bus utilizado:
El formato DT_ModbusExtParity es una enumeracin de las paridades posibles
con la red Modbus:
Valor Descripcin
0 10 kbaudios
1 20 kbaudios
2 50 kbaudios
3 125 kbaudios
4 250 kbaudios (predeterminado)
5 500 kbaudios
6 800 kbaudios
7 1000 kbaudios
8 Transmisin en baudios automtica
9 Predeterminado
Valor Descripcin
0 Ninguno
1 Par
2 Impar
Uso
466 1639505 06/2009
DT_FaultCode
El formatoDT_FaultCode es una enumeracin de cdigos de fallo:
Cdigo de fallo Descripcin
0 Sin errores
3 Corriente de tierra
4 Sobrecarga trmica
5 Arranque prolongado
6 Agarrotamiento
7 Desequilibrio de corrientes de fase
8 Infracorriente
10 Prueba
11 Error de puerto HMI
12 Prdida de comunicacin del puerto HMI
13 Error interno del puerto de red
16 Fallo externo
18 Diagnstico encendido/apagado
19 Diagnstico de cableado
20 Sobrecorriente
21 Prdida de corriente de fase
22 Inversin de corrientes de fase
23 Sensor de temperatura del motor
24 Desequilibrio de tensiones de fase
25 Prdida de tensin de fase
26 Inversin de tensin de fase
27 Infratensin
28 Sobretensin
29 Potencia insuficiente
30 Potencia excesiva
31 Factor de potencia insuficiente
32 Factor de potencia excesivo
33 Configuracin de LTME
34 Cortocircuito en el sensor de temperatura
35 Circuito abierto en el sensor de temperatura
36 Inversin de CT
46 Comprobacin de inicio
Uso
1639505 06/2009 467
DT_FirmwareVersion
El formatoDT_FirmwareVersion es una matriz XY000 que describe una revisin
de firmware:
X = revisin principal
Y = revisin secundaria
Ejemplo:
Direccin 76, UInt, Controlador-versin de firmware.
47 Ejecutar recomprobacin
48 Parar comprobacin
49 Parar recomprobacin
51 Error de temperatura interna del controlador
55 Error interno del controlador (desbordamiento de pila)
56 Error interno del controlador (error de RAM)
57 Error interno del controlador (error de suma de comprobacin de RAM)
58 Error interno del controlador (fallo de vigilancia de hardware)
60 Detectada corriente L2 en modo monofsico
64 Error de memoria no voltil
65 Error de comunicacin del mdulo de expansin
66 Botn de rearme bloqueado
67 Error de funcin lgica
100-104 Error interno del puerto de red
109 Error de comunicacin de puerto de red
111 Fallo de sustitucin de dispositivo defectuoso
555 Error de configuracin de puerto de red
Cdigo de fallo Descripcin
Uso
468 1639505 06/2009
DT_Language5
El formatoDT_Language5 es una enumeracin que se utiliza para el idioma de
visualizacin:
Ejemplo:
Direccin 650, Palabra, HMI-ajuste de idioma.
DT_OutputFallbackStrategy
El formato DT_OutputFallbackStrategy es una enumeracin de los estados de
salida del motor cuando se pierde la comunicacin.
DT_PhaseNumber
El formato DT_PhaseNumber es una enumeracin, con solo 1 bit activado:
Cdigo de idioma Descripcin
1 English (predeterminado)
2 Franais
4 Espaol
8 Deutsch
16 Italiano
Valor Descripcin Modos del motor
0 Mantenido LO1 LO2 Para todos los modos
1 Marcha Solo para el modo de 2 tiempos
2 LO1, LO2 desactivados Para todos los modos
3 LO1, LO2 activados Solo para los modos de funcionamiento sobrecarga, independiente y
personalizado
4 LO1 activado Para todos los modos, excepto el de 2 tiempos
5 LO2 activado Para todos los modos, excepto el de 2 tiempos
Valor Descripcin
1 1 fase
2 3 fases
Uso
1639505 06/2009 469
DT_ResetMode
El formato DT_ResetMode es una enumeracin de los modos posibles para el
rearme tras fallo trmico:
DT_WarningCode
El formatoDT_WarningCode es una enumeracin de cdigos de advertencia:
Valor Descripcin
1 Manual o HMI
2 A distancia por la red
4 Automtico
Cdigo de advertencia Descripcin
0 Sin advertencias
3 Corriente de tierra
4 Sobrecarga trmica
5 Arranque prolongado
6 Agarrotamiento
7 Desequilibrio de corrientes de fase
8 Infracorriente
10 Puerto HMI
11 Temperatura interna del LTM R
18 Diagnstico
19 Cableado
20 Sobrecorriente
21 Prdida de corriente de fase
23 Sensor de temperatura del motor
24 Desequilibrio de tensiones de fase
25 Prdida de tensin de fase
27 Infratensin
28 Sobretensin
29 Potencia insuficiente
30 Potencia excesiva
31 Factor de potencia insuficiente
32 Factor de potencia excesivo
33 Configuracin del LTM E
46 Comprobacin de inicio
Uso
470 1639505 06/2009
47 Ejecutar recomprobacin
48 Parar comprobacin
49 Parar recomprobacin
109 Prdida de comunicacin del puerto de red
555 Configuracin del puerto de red
Cdigo de advertencia Descripcin
Uso
1639505 06/2009 471
Variables de identificacin
Variables de identificacin
A continuacin se describen las variables de identificacin:
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
0-34 (Sin significado)
35-40 Palabra[6] Expansin-referencia comercial
(consulte DT_CommercialReference, pgina 462)
1
41-45 Palabra[5] Expansin-nmero de serie 1
46 UInt Expansin-cdigo de identificacin
47 UInt Expansin-versin de firmware
(consulte DT_FirmwareVersion, pgina 467)
1
48 UInt Expansin-cdigo de compatibilidad 1
49-60 (Sin significado)
61 Ulnt Puerto de red-cdigo de identificacin
62 Ulnt Puerto de red-versin de firmware
(consulte DT_FirmwareVersion, pgina 467)
63 Ulnt Puerto de red-cdigo de compatibilidad
64-69 Palabra[6] Controlador-referencia comercial
(consulte DT_CommercialReference, pgina 462)
70-74 Palabra[5] Controlador-nmero de serie
75 Ulnt Controlador-cdigo de identificacin
76 Ulnt Controlador-versin del firmware
(consulte DT_FirmwareVersion, pgina 467)
77 Ulnt Controlador-cdigo de compatibilidad
78 Ulnt Corriente-relacin de escala (0,1%)
79 Ulnt Corriente-mx. del sensor
80 (Sin significado)
81 Ulnt Corriente-rango mx. (x 0,1 A)
82-94 (Sin significado)
95 Ulnt CT de carga-relacin (x 0,1 A)
96 Ulnt Corriente a plena carga-mx. (intervalo FLC mximo, FLC =
Corriente a plena carga) (x 0,1 A)
97-99 (Olvidado)
Uso
472 1639505 06/2009
Variables histricas
Descripcin general de los histricos
Las variables histricas estn agrupadas segn los criterios siguientes: Los
histricos de disparo se incluyen en una tabla principal y una tabla de extensin.
Grupos de variables histricas Registros
Histricos globales 100 a 121
Histricos de supervisin de LTM 122 a 149
Histricos de ltimos disparos
y extensin
150 a 179
300 a 309
Histricos de disparo n-1
y extensin
180 a 209
330 a 339
Histricos de disparo n-2
y extensin
210 a 239
360 a 369
Histricos de disparo n-3
y extensin
240 a 269
390 a 399
Histricos de disparo n-4
y extensin
270 a 299
420 a 429
Uso
1639505 06/2009 473
Histricos globales
A continuacin se describen los histricos globales:
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
100-101 (Sin significado)
102 Ulnt Corriente de tierra-nmero de fallos
103 Ulnt Sobrecarga trmica-nmero de fallos
104 Ulnt Arranque prolongado-nmero de fallos
105 Ulnt Agarrotamiento-nmero de fallos
106 Ulnt Corriente-nmero de fallos de desequilibrio de fases
107 Ulnt Infracorriente-nmero de fallos
109 Ulnt HMI-nmero de fallos de puerto
110 Ulnt Controlador-nmero de fallos internos
111 Ulnt Puerto interno-nmero de fallos
112 Ulnt (Sin significado)
113 Ulnt Puerto de red-nmero de fallos de configuracin
114 Ulnt Puerto de red-nmero de fallos
115 Ulnt Reinicio automtico-nmero
116 Ulnt Sobrecarga trmica-nmero de advertencias
117-118 UDlnt Motor-nmero de arranques
119-120 UDlnt Tiempo de funcionamiento (s)
121 lnt Controlador-temperatura interna mx. (C)
Uso
474 1639505 06/2009
Histricos de supervisin de LTM
A continuacin se describen los histricos de supervisin de LTM:
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
122 Ulnt Fallos-nmero
123 Ulnt Advertencias-nmero
124-125 UDlnt Motor-nmero de arranques L01
126-127 UDlnt Motor-nmero de arranques L02
128 Ulnt Diagnsticos-nmero de fallos
129 Ulnt (Reservado)
130 Ulnt Sobrecorriente-nmero de fallos
131 Ulnt Corriente-nmero de fallos de prdida de fase
132 Ulnt Motor-nmero de fallos de sensor de temperatura
133 Ulnt Tensin-nmero de fallos de desequilibrio de fases 1
134 Ulnt Tensin-nmero de fallos de prdida de fase 1
135 Ulnt Cableado-nmero de fallos 1
136 Ulnt Infratensin-nmero de fallos 1
137 Ulnt Sobretensin-nmero de fallos 1
138 Ulnt Potencia insuficiente-nmero de fallos 1
139 Ulnt Potencia excesiva-nmero de fallos 1
140 Ulnt Factor de potencia insuficiente-nmero de fallos 1
141 Ulnt Factor de potencia excesivo-nmero de fallos 1
142 Ulnt Descarga-nmero 1
143-144 UDlnt Potencia activa-consumo (kWh) 1
145-146 UDlnt Potencia reactiva-consumo (kVARh) 1
147 Ulnt Nmero de rearranques automticos inmediatos
148 Ulnt Nmero de rearranques automticos con retardo
149 Ulnt Nmero de rearranques automticos manuales
Uso
1639505 06/2009 475
Histricos de ltimos fallos (n-0)
Los histricos de ltimos fallos contienen las variables de las direcciones 300 a 310.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
150 Ulnt Fallo-cdigo n-0
151 Ulnt Motor-relacin de corriente a plena carga n-0 (% FLC mx.)
152 Ulnt Nivel de capacidad trmica n-0 (% nivel de disparo)
153 Ulnt Corriente media-relacin n-0 (% FLC)
154 Ulnt Corriente L1-relacin n-0 (% FLC)
155 Ulnt Corriente L2-relacin n-0 (% FLC)
156 Ulnt Corriente L3-relacin n-0 (% FLC)
157 Ulnt Corriente de tierra-relacin n-0 (x 0,1% FLC mn.)
158 Ulnt Corriente a plena carga-mx. n-0 (x 0,1 A)
159 Ulnt Corriente-desequilibrio de fases n-0 (%)
160 Ulnt Frecuencia n-0 (x 0,1 Hz)
161 Ulnt Motor-sensor de temperatura n-0 (x 0,1 )
162-165 Palabra[4] Fecha y hora n-0
(consulte DT_DateTime, pgina 463)
166 Ulnt Tensin media n-0 (V) 1
167 Ulnt Tensin L3-L1 n-0 (V) 1
168 Ulnt Tensin L1-L2 n-0 (V) 1
169 Ulnt Tensin L2-L3 n-0 (V) 1
170 Ulnt Tensin-desequilibrio de fases n-0 (%) 1
171 Ulnt Potencia activa n-0 (x 0,1 kW) 1
172 Ulnt Factor de potencia n-0 (x 0,01) 1
173-179 (Sin significado)
Uso
476 1639505 06/2009
Histricos de fallos N-1
Los histricos de fallos n-1 contienen las variables de las direcciones 330 a 340.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
180 Ulnt Fallo-cdigo n-1
181 Ulnt Motor-relacin de corriente a plena carga n-1 (% FLC mx.)
182 Ulnt Nivel de capacidad trmica n-1 (% nivel de disparo)
183 Ulnt Corriente media-relacin n-1 (% FLC)
184 Ulnt Corriente L1-relacin n-1 (% FLC)
185 Ulnt Corriente L2-relacin n-1 (% FLC)
186 Ulnt Corriente L3-relacin n-1 (% FLC)
187 Ulnt Corriente de tierra-relacin n-1 (x 0,1% FLC mn.)
188 Ulnt Corriente a plena carga-mx. n-1 (x 0,1 A)
189 Ulnt Corriente-desequilibrio de fases n-1 (%)
190 Ulnt Frecuencia n-1 (x 0,1 Hz)
191 Ulnt Motor-sensor de temperatura n-1 (x 0,1 )
192-195 Palabra[4] Fecha y hora n-1
(consulte DT_DateTime, pgina 463)
196 Ulnt Tensin media n-1 (V) 1
197 Ulnt Tensin L3-L1 n-1 (V) 1
198 Ulnt Tensin L1-L2 n-1 (V) 1
199 Ulnt Tensin L2-L3 n-1 (V) 1
200 Ulnt Tensin-desequilibrio de fases n-1 (%) 1
201 Ulnt Potencia activa n-1 (x 0,1 kW) 1
202 Ulnt Factor de potencia n-1 (x 0,01) 1
203-209 Ulnt (Sin significado)
Uso
1639505 06/2009 477
Histricos de fallos N-2
Los histricos de fallos n-2 contienen las variables de las direcciones 360 a 370.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
210 Ulnt Fallo-cdigo n-2
211 Ulnt Motor-relacin de corriente a plena carga n-2 (% FLC mx.)
212 Ulnt Nivel de capacidad trmica n-2 (% nivel de disparo)
213 Ulnt Corriente media-relacin n-2 (% FLC)
214 Ulnt Corriente L1-relacin n-2 (% FLC)
215 Ulnt Corriente L2-relacin n-2 (% FLC)
216 Ulnt Corriente L3-relacin n-2 (% FLC)
217 Ulnt Corriente de tierra-relacin n-2 (x 0,1% FLC mn.)
218 Ulnt Corriente a plena carga-mx. n-2 (x 0,1 A)
219 Ulnt Corriente-desequilibrio de fases n-2 (%)
220 Ulnt Frecuencia n-2 (x 0,1 Hz)
221 Ulnt Motor-sensor de temperatura n-2 (x 0,1 )
222-225 Palabra[4] Fecha y hora n-2
(consulte DT_DateTime, pgina 463)
226 Ulnt Tensin media n-2 (V) 1
227 Ulnt Tensin L3-L1 n-2 (V) 1
228 Ulnt Tensin L1-L2 n-2 (V) 1
229 Ulnt Tensin L2-L3 n-2 (V) 1
230 Ulnt Tensin-desequilibrio de fases n-2 (%) 1
231 Ulnt Potencia activa n-2 (x 0,1 kW) 1
232 Ulnt Factor de potencia n-2 (x 0,01) 1
233-239 (Sin significado)
Uso
478 1639505 06/2009
Histricos de fallos N-3
Los histricos de fallos n-3 contienen las variables de las direcciones 390 a 400.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
240 Ulnt Fallo-cdigo n-3
241 Ulnt Motor-relacin de corriente a plena carga n-3 (% FLC mx.)
242 Ulnt Nivel de capacidad trmica n-3 (% nivel de disparo)
243 Ulnt Corriente media-relacin n-3 (% FLC)
244 Ulnt Corriente L1-relacin n-3 (% FLC)
245 Ulnt Corriente L2-relacin n-3 (% FLC)
246 Ulnt Corriente L3-relacin n-3 (% FLC)
247 Ulnt Corriente de tierra-relacin n-3 (x 0,1% FLC mn.)
248 Ulnt Corriente a plena carga-mx. n-3 (0,1 A)
249 Ulnt Corriente-desequilibrio de fases n-3 (%)
250 Ulnt Frecuencia n-3 (x 0,1 Hz)
251 Ulnt Motor-sensor de temperatura n-3 (x 0,1 )
252-255 Palabra[4] Fecha y hora n-3
(consulte DT_DateTime, pgina 463)
256 Ulnt Tensin media n-3 (V) 1
257 Ulnt Tensin L3-L1 n-3 (V) 1
258 Ulnt Tensin L1-L2 n-3 (V) 1
259 Ulnt Tensin L2-L3 n-3 (V) 1
260 Ulnt Tensin-desequilibrio de fases n-3 (%) 1
261 Ulnt Potencia activa n-3 (x 0,1 kW) 1
262 Ulnt Factor de potencia n-3 (x 0,01) 1
263-269 (Sin significado)
Uso
1639505 06/2009 479
Histricos de fallos N-4
Los histricos de fallos n-4 contienen las variables de las direcciones 420 a 430.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
270 Ulnt Fallo-cdigo n-4
271 Ulnt Motor-relacin de corriente a plena carga n-4 (% FLC mx.)
272 Ulnt Nivel de capacidad trmica n-4 (% nivel de disparo)
273 Ulnt Corriente media-relacin n-4 (% FLC)
274 Ulnt Corriente L1-relacin n-4 (% FLC)
275 Ulnt Corriente L2-relacin n-4 (% FLC)
276 Ulnt Corriente L3-relacin n-4 (% FLC)
277 Ulnt Corriente de tierra-relacin n-4 (x 0,1% FLC mn.)
278 Ulnt Corriente a plena carga-mx. n-4 (x 0,1 A)
279 Ulnt Corriente-desequilibrio de fases n-4 (%)
280 Ulnt Frecuencia n-4 (x 0,1 Hz)
281 Ulnt Motor-sensor de temperatura n-4 (x 0,1 )
282-285 Palabra[4] Fecha y hora n-4
(consulte DT_DateTime, pgina 463)
286 Ulnt Tensin media n-4 (V) 1
287 Ulnt Tensin L3-L1 n-4 (V) 1
288 Ulnt Tensin L1-L2 n-4 (V) 1
289 Ulnt Tensin L2-L3 n-4 (V) 1
290 Ulnt Tensin-desequilibrio de fases n-4 (%) 1
291 Ulnt Potencia activa n-4 (x 0,1 kW) 1
292 Ulnt Factor de potencia n-4 (x 0,01) 1
293-299 (Sin significado)
Uso
480 1639505 06/2009
Extensin de histricos de ltimos fallos (n-0)
Los histricos principales de ltimos fallos se muestran en las direcciones 150-179.
Extensin de histricos de fallos N-1
Los histricos principales de fallos n-1 se muestran en las direcciones 180-209.
Extensin de histricos de fallos N-2
Los histricos principales de fallos n-2 se muestran en las direcciones 210-239.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
300-301 UDlnt Corriente media n-0 (x 0,01 A)
302-303 UDlnt Corriente L1 n-0 (x 0,01 A)
304-305 UDlnt Corriente L2 n-0 (x 0,01 A)
306-307 UDlnt Corriente L3 n-0 (x 0,01 A)
308-309 UDlnt Corriente de tierra n-0 (mA)
310 Ulnt Grado n-0 del sensor de temperatura del motor (C)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
330-331 UDlnt Corriente media n-1 (x 0,01 A)
332-333 UDlnt Corriente L1 n-1 (x 0,01 A)
334-335 UDlnt Corriente L2 n-1 (x 0,01 A)
336-337 UDlnt Corriente L3 n-1 (x 0,01 A)
338-339 UDlnt Corriente de tierra n-1 (mA)
340 Ulnt Grado n-1 del sensor de temperatura del motor (C)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
360-361 UDlnt Corriente media n-2 (x 0,01 A)
362-363 UDlnt Corriente L1 n-2 (x 0,01 A)
364-365 UDlnt Corriente L2 n-2 (x 0,01 A)
366-367 UDlnt Corriente L3 n-2 (x 0,01 A)
368-369 UDlnt Corriente de tierra n-2 (mA)
370 Ulnt Grado n-2 del sensor de temperatura del motor (C)
Uso
1639505 06/2009 481
Extensin de histricos de fallos N-3
Los histricos principales de fallos n-3 se muestran en las direcciones 240-269.
Extensin de histricos de fallos N-4
Los histricos principales de fallos n-4 se muestran en las direcciones 270-299.
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
390-391 UDlnt Corriente media n-3 (x 0,01 A)
392-393 UDlnt Corriente L1 n-3 (x 0,01 A)
394-395 UDlnt Corriente L2 n-3 (x 0,01 A)
396-397 UDlnt Corriente L3 n-3 (x 0,01 A)
398-399 UDlnt Corriente de tierra n-3 (mA)
400 Ulnt Grado n-3 del sensor de temperatura del motor (C)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
420-421 UDlnt Corriente media n-4 (x 0,01 A)
422-423 UDlnt Corriente L1 n-4 (x 0,01 A)
424-425 UDlnt Corriente L2 n-4 (x 0,01 A)
426-427 UDlnt Corriente L3 n-4 (x 0,01 A)
428-429 UDlnt Corriente de tierra n-4 (mA)
430 Ulnt Grado n-4 del sensor de temperatura del motor (C)
Uso
482 1639505 06/2009
Variables de supervisin
Descripcin general de la supervisin
Las variables de supervisin estn agrupadas segn los criterios siguientes:
Supervisin de fallos
A continuacin se describen las variables de supervisin de fallos:
Grupos de variables de supervisin Registros
Supervisin de fallos 450 a 454
Supervisin de estado 455 a 459
Supervisin de advertencias 460 a 464
Supervisin de mediciones 465 a 539
Supervisin ampliada para comunicacin 2000 a 2499
Estado FDR de supervisin ampliada 10001 a 10010
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
450 Ulnt Mnimo-tiempo de espera (s)
451 Ulnt Fallo-cdigo (cdigo del ltimo fallo, o del fallo que tiene
prioridad)
(consulte DT_FaultCode, pgina 466)
452 Palabra Registro de fallos 1
bits 0-1 (Reservados)
bit 2 Corriente de tierra-fallo
bit 3 Sobrecarga trmica-fallo
bit 4 Arranque prolongado-fallo
bit 5 Agarrotamiento-fallo
bit 6 Corriente-fallo de desequilibrio de fases
bit 7 Fallo de infracorriente
bit 8 (Reservado)
bit 9 Prueba-fallo
bit 10 HMI-fallo de puerto
bit 11 Controlador-fallo interno
bit 12 Puerto interno-fallo
bit 13 (Sin significado)
bit 14 Puerto de red-fallo de configuracin
bit 15 Puerto de red-fallo
Uso
1639505 06/2009 483
Supervisin de estado
A continuacin se describen las variables de supervisin de estado:
453 Palabra Registro de fallos 2
bit 0 (Sin significado)
bit 1 Diagnstico-fallo
bit 2 Cableado-fallo
bit 3 Sobrecorriente-fallo
bit 4 Corriente-fallo de prdida de fase
bit 5 Corriente-fallo de inversin de fases
bit 6 Motor-fallo de sensor de temperatura 1
bit 7 Tensin-fallo de desequilibrio de fases 1
bit 8 Tensin-fallo de prdida de fase 1
bit 9 Tensin-fallo de inversin de fase 1
bit 10 Infratensin-fallo 1
bit 11 Sobretensin-fallo 1
bit 12 Potencia insuficiente-fallo 1
bit 13 Potencia excesiva-fallo 1
bit 14 Factor de potencia insuficiente-fallo 1
bit 15 Factor de potencia excesivo-fallo 1
454 Palabra Registro de fallos 3
bit 0 Fallo de configuracin de LTM E
bits 1-15 (Reservados)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
484 1639505 06/2009
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
455 Palabra Registro 1 de estado del sistema
bit 0 Sistema-listo
bit 1 Sistema-activado
bit 2 Sistema-fallo
bit 3 Sistema-advertencia
bit 4 Sistema-disparado
bit 5 Fallo-reinicio autorizado
bit 6 Controlador-potencia
bit 7 Motor-en marcha (con deteccin de corriente, si es
superior al 10% de FLC)
bits 8-13 Motor-relacin de corriente media
32 = 100% FLC - 63 = 200% FLC
bit 14 Control mediante HMI
bit 15 Motor-en arranque (arranque en curso)
0 = la corriente de bajada es inferior al 150% de FLC
1 = la corriente de subida es superior al 10% de FLC
456 Palabra Registro 2 de estado del sistema
bit 0 Reinicio automtico-activo
bit 1 (Sin significado)
bit 2 Fallo-peticin de apagar y encender
bit 3 Motor-tiempo de reinicio indeterminado
bit 4 Ciclo rpido-bloqueo
bit 5 Descarga 1
bit 6 Motor-velocidad
Parmetro utilizado 0 = FLC1
Parmetro utilizado 1 = FLC2
bit 7 HMI-prdida de comunicacin con el puerto
bit 8 Puerto de red-prdida de comunicaciones
bit 9 Motor-bloqueo transicin
bits 10-15 (Sin significado)
Uso
1639505 06/2009 485
457 Palabra Estado de entradas lgicas
bit 0 Lgica-entrada 1
bit 1 Lgica-entrada 2
bit 2 Lgica-entrada 3
bit 3 Lgica-entrada 4
bit 4 Lgica-entrada 5
bit 5 Lgica-entrada 6
bit 6 Lgica-entrada 7
bit 7 Lgica-entrada 8 1
bit 8 Lgica-entrada 9 1
bit 9 Lgica-entrada 10 1
bit 10 Lgica-entrada 11 1
bit 11 Lgica-entrada 12 1
bit 12 Lgica-entrada 13 1
bit 13 Lgica-entrada 14 1
bit 14 Lgica-entrada 15 1
bit 15 Lgica-entrada 16 1
458 Palabra Estado de salidas lgicas
bit 0 Lgica-salida 1
bit 1 Lgica-salida 2
bit 2 Lgica-salida 3
bit 3 Lgica-salida 4
bit 4 Lgica-salida 5 1
bit 5 Lgica-salida 6 1
bit 6 Lgica-salida 7 1
bit 7 Lgica-salida 8 1
bits 8-15 (Reservados)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
486 1639505 06/2009
459 Palabra Estado de E/S
bit 0 Entrada 1
bit 1 Entrada 2
bit 2 Entrada 3
bit 3 Entrada 4
bit 4 Entrada 5
bit 5 Entrada 6
bit 6 Entrada 7
bit 7 Entrada 8
bit 8 Entrada 9
bit 9 Entrada 10
bit 10 Entrada 11
bit 11 Entrada 12
bit 12 Salida 1 (13-14)
bit 13 Salida 2 (23-24)
bit 14 Salida 3 (33-34)
bit 15 Salida 4 (95-96, 97-98)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
1639505 06/2009 487
Supervisin de advertencias
A continuacin se describen las variables de supervisin de advertencias:
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
460 UInt Advertencia-cdigo
(consulte DT_WarningCode, pgina 469)
461 Palabra Registro de advertencia 1
bits 0-1 (Sin significado)
bit 2 Corriente de tierra-advertencia
bit 3 Sobrecarga trmica-advertencia
bit 4 (Sin significado)
bit 5 Agarrotamiento-advertencia
bit 6 Corriente-advertencia de desequilibrio de fases
bit 7 Infracorriente-advertencia
bits 8-9 (Sin significado)
bit 10 HMI-advertencia de puerto
bit 11 Advertencia de temperatura interna del controlador
bits 12-14 (Sin significado)
bit 15 Puerto de red-advertencia
462 Palabra Registro de advertencia 2
bit 0 (Sin significado)
bit 1 Diagnstico-advertencia
bit 2 (Reservado)
bit 3 Sobrecorriente-advertencia
bit 4 Corriente-advertencia de prdida de fase
bit 5 (Reservado)
bit 6 Motor-advertencia de sensor de temperatura
bit 7 Tensin-advertencia de desequilibrio de fases 1
bit 8 Tensin-advertencia de prdida de fase 1
bit 9 (Sin significado) 1
bit 10 Infratensin-advertencia 1
bit 11 Sobretensin-advertencia 1
bit 12 Potencia insuficiente-advertencia 1
bit 13 Potencia excesiva-advertencia 1
bit 14 Factor de potencia insuficiente-advertencia 1
bit 15 Factor de potencia excesivo-advertencia 1
Uso
488 1639505 06/2009
Supervisin de mediciones
A continuacin se describen las variables de supervisin de mediciones:
463 Palabra Registro de advertencia 3
bit 0 Advertencia de configuracin de LTM E
bits 1-15 (Reservados)
464 UInt Grado del sensor de temperatura del motor (C)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
465 UInt Nivel de capacidad trmica (% nivel de disparo)
466 UInt Corriente media-relacin (% FLC)
467 UInt Corriente L1-relacin (% FLC)
468 UInt Corriente L2-relacin (% FLC)
469 UInt Corriente L3-relacin (% FLC)
470 UInt Corriente de tierra-relacin (x 0,1% FLCmn)
471 UInt Corriente-desequilibrio de fases (%)
472 Int Controlador-temperatura interna (C)
473 UInt Controlador-configuracin de suma de comprobacin
474 UInt Frecuencia (x 0,01 Hz)
475 UInt Motor-sensor de temperatura (x 0,1 )
476 UInt Tensin media (V) 1
477 UInt Tensin L3-L1 (V) 1
478 UInt Tensin L1-L2 (V) 1
479 UInt Tensin L2-L3 (V) 1
480 UInt Tensin-desequilibrio de fases (%) 1
481 UInt Factor de potencia (x 0,01) 1
482 UInt Potencia activa (x 0,1 kW) 1
483 UInt Potencia reactiva (x 0,1 kVAR) 1
Uso
1639505 06/2009 489
484 Palabra Registro de estado de rearranque automtico
bit 0 Cada de tensin producida
bit 1 Deteccin de cada de tensin
bit 2 Condicin de rearranque automtico inmediato
bit 3 Condicin de rearranque automtico con retardo
bit 4 Condicin de rearranque automtico manual
bits 5-15 (Sin significado)
485 Palabra Duracin del ltimo apagado del controlador
486-489 Palabra (Sin significado)
490 Palabra Supervisin del puerto de red
bit 0 Puerto de red-comunicacin en curso
bit 1 Puerto de red-conectado
bit 2 Puerto de red-comprobacin automtica en curso
bit 3 Puerto de red-deteccin automtica en curso
bit 4 Puerto de red-configuracin incorrecta
bits 5-7 (Sin significado)
bits 8-11 Estado FDR del puerto de red
0 = Listo, IP disponible, sin errores
1 = Ninguna respuesta del servidor IP
2 = Ninguna respuesta del servidor de parmetros
3 = Ningn archivo en el servidor de parmetros
4 = Archivo daado en el servidor de parmetros
5 = Archivo vaco en el servidor de parmetros
6 = Fallo de comunicacin interna
7 = Error de escritura al copiar los ajustes en el servidor
de parmetros
8 = Ajustes no vlidos proporcionados por el controlador
9 = No hay coincidencia de CRC entre el servidor de
parmetros y el controlador
10 = IP no vlida
11 = IP duplicada
12 = FDR desactivado
13 = La versin del archivo de parmetros del
dispositivo no coincide
bits 12-15 (Sin significado)
491-499 Palabra (Sin significado)
500-501 UDInt Corriente media (x 0,01 A)
502-503 UDInt Corriente L1 (x 0,01 A)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
490 1639505 06/2009
504-505 UDInt Corriente L2 (x 0,01 A)
506-507 UDInt Corriente L3 (x 0,01 A)
508-509 UDInt Corriente de tierra (mA)
510 UInt Controlador-ID de puerto
511 UInt Tiempo hasta el disparo (x 1 s)
512 UInt Motor-corriente del ltimo arranque (% FLC)
513 UInt Motor-duracin del ltimo arranque (s)
514 UInt Motor-nmero de arranques por hora
515 Palabra Registro de desequilibrio de fases
bit 0 Corriente L1-desequilibrio superior
bit 1 Corriente L2-desequilibrio superior
bit 2 Corriente L3-desequilibrio superior
bit 3 Tensin L1-L2-desequilibrio superior 1
bit 4 Tensin L2-L3-desequilibrio superior 1
bit 5 Tensin L3-L1-desequilibrio superior 1
bits 6-15 (Sin significado)
516 - 523 (Reservado)
524 - 539 (Olvidado)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
1639505 06/2009 491
Supervisin ampliada para comunicacin
A continuacin se describen las variables de supervisin ampliada para
comunicacin:
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
2000 - 2001 Palabras (2) Validez de diag HW bsico Ethernet
Registro 2000:
bit 0: Servicios Ethernet disponibles (1 = S)
bit 1: Estado global Ethernet disponible (1 = S)
bits 2 a 14: (Reservados)
bit 15: Campo Ethernet ampliado 1 disponible (1 = S)
Registro 2001:
bit 0: Modo de asignacin de IP Ethernet disponible (1 = S)
bit 1: Nombre de dispositivo Ethernet disponible (1 = S)
bit 2: Contador de mensajes Ethernet MB recibidos disponible (1 = S)
bit 3: Contador de mensajes Ethernet MB enviados disponible (1 = S)
bit 4: Contador de mensajes de error Ethernet MB enviados
disponible (1 = S)
bit 5: Contador de servidores Ethernet abiertos disponible (1 = S)
bit 6: Contador de clientes Ethernet abiertos disponible (1 = S)
bit 7: Contador de tramas correctas Ethernet transmitidas disponible
(1 = S)
bit 8: Contador de tramas correctas Ethernet recibidas disponible (1
= S)
bit 9: Formato de trama Ethernet disponible (1 = S)
bit 10: Direccin MAC Ethernet disponible (1 = S)
bit 11: Pasarela Ethernet disponible (1 = S)
bit 12: Mscara de subred Ethernet disponible (1 = S)
bit 13: Direccin IP Ethernet disponible (1 = S)
bit 14: Estado de los servicios Ethernet disponible (1 = S)
bit 15: Campo Ethernet ampliado 2 disponible (1 = S)
2002 Palabra Estado global Ethernet
bits 0-1: Estado global Ethernet
1= al menos 1 servicio activado funciona con un error no resuelto
2 = todos los servicios activados funcionan sin errores
bits 2-15: (Reservados)
Uso
492 1639505 06/2009
2003 Palabra Validez de servicios Ethernet
bit 0: Mensajera del puerto 502 Ethernet disponible (1 = S)
bits 1-15: (Reservados)
2004 Palabra Estado de servicios Ethernet
bits 0-2: Mensajera del puerto 502 Ethernet
1 = inactiva
2 = operativa
bits 3-15: (Reservados)
2005 - 2006 UDInt Direccin IP Ethernet
Registro 2005:
bits 0-7: primer byte
bits 8-15: segundo byte
Registro 2006:
bits 0-7: tercer byte
bits 8-15: cuarto byte
2007 - 2008 UDInt Mscara de subred Ethernet
Registro 2007:
bits 0-7: primer byte
bits 8-15: segundo byte
Registro 2008:
bits 0-7: tercer byte
bits 8-15: cuarto byte
2009 - 2010 UDInt Direccin de pasarela Ethernet
Registro 2009:
bits 0-7: primer byte
bits 8-15: segundo byte
Registro 2010:
bits 0-7: tercer byte
bits 8-15: cuarto byte
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
1639505 06/2009 493
2011 - 2013 Palabras (3) Direccin MAC Ethernet
Registro 2011:
bits 0-7: primer byte hexadecimal
bits 8-15: segundo byte hexadecimal
Registro 2012:
bits 0-7: tercer byte hexadecimal
bits 8-15: cuarto byte hexadecimal
Registro 2013:
bits 0-7: quinto byte hexadecimal
bits 8-15: sexto byte hexadecimal
2014 - 2016 Palabras (3) Registros de tramas Ethernet II
Registro 2014:
bit 0: Tramas Ethernet II admitidas (1 = S)
bit 1: Receptor de tramas Ethernet II admitido (1 = S)
bit 2: Remitente de tramas Ethernet II admitido (1 = S)
bit 3: Deteccin automtica de Ethernet admitida (1 = S)
bits 4-15: (Reservados)
Registro 2015:
bit 0: Tramas Ethernet II configuradas (1 = S)
bit 1: Receptor de tramas Ethernet II configurado (1 = S)
bit 2: Remitente de tramas Ethernet II configurado (1 = S)
bit 3: Deteccin automtica de Ethernet configurada (1 = S)
bits 4-15: (Reservados)
Registro 2016:
bit 0: Tramas Ethernet II operativas (1 = S)
bit 1: Receptor de tramas Ethernet II operativo (1 = S)
bit 2: Remitente de tramas Ethernet II operativo (1 = S)
bit 3: Deteccin automtica de Ethernet operativa (1 = S)
bits 4-15: (Reservados)
2017 - 2018 UDInt Contador de tramas correctas Ethernet recibidas
2019 - 2020 UDInt Contador de tramas correctas Ethernet transmitidas
2021 UInt Contador de clientes Ethernet abiertos
2022 UInt Contador de servidores Ethernet abiertos
2023 - 2024 UDInt Contador de mensajes de error Ethernet MB enviados
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Uso
494 1639505 06/2009
Estado FDR de supervisin ampliada
A continuacin se describen las variables de supervisin ampliada de estado FDR:
2025 - 2026 UDInt Contador de mensajes Ethernet MB enviados
2027 - 2028 UDInt Contador de mensajes Ethernet MB recibidos
2029 - 2036 Palabras (8) Nombre de dispositivo Ethernet
2037 Palabra Ethernet-capacidad de asignacin IP
bit 0: IP Ethernet servido por nombre disponible (1 = S)
bit 1: IP Ethernet servido por MAC BootP disponible (1 = S)
bit 2: IP Ethernet servido por MAC DHCP disponible (1 = S)
bit 3: IP Ethernet servido por asignacin almacenada disponible (1 =
S)
bits 4-15: (Reservados)
2038 Palabra Ethernet-asignacin IP operativa
bit 0: IP Ethernet servido por nombre disponible (1 = S)
bit 1: IP Ethernet servido por MAC BootP disponible (1 = S)
bit 2: IP Ethernet servido por MAC DHCP disponible (1 = S)
bit 3: IP Ethernet servido por asignacin almacenada disponible (1 =
S)
bits 4-15: (Reservados)
2039 - 2499 (Reservados)
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
Registro Tipo de
variable
Variables de slo lectura Nota,
pgina 457
10001 Palabra Versin FDR
10002 Palabra Tamao de los datos FDR
10003 Palabra Suma de datos FDR
10004 Palabra Estado de restauracin FDR
0 si la ltima operacin de restauracin se realiz con
xito.
Un valor positivo distinto a cero indica el ndice (+1) en
el bloque de datos del registro culpable.
-1 indica un nmero de referencia comercial incorrecto.
10005 a 10010 Palabra[6] Referencia comercial del destino de FDR
(vase pgina 462)
Uso
1639505 06/2009 495
Variables de configuracin
Descripcin general de la configuracin
Las variables de configuracin estn agrupadas segn los criterios siguientes:
Variables de configuracin
A continuacin se describen las variables de configuracin:
Grupos de variables de configuracin Registros
Configuracin 540 a 649
Ajuste 650 a 699
Configuracin ampliada 3000 a 3499
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
540 UInt Motor-modo de funcionamiento:
2 = Sobrecarga 2 hilos
3 = Sobrecarga 3 hilos
4 = Independiente 2 hilos
5 = Independiente 3 hilos
6 = 2 sentidos de marcha 2 hilos
7 = 2 sentidos de marcha 3 hilos
8 = 2 tiempos 2 hilos
9 = 2 tiempos 3 hilos
10 = 2 velocidades 2 hilos
11 = 2 velocidades 3 hilos
256-511 = Programa de lgica personalizada (0-255)
B
541 UInt Motor-tiempo sobrepasado de transicin (s)
542-544 (Reservado)
545 Palabra Registro de ajuste de las entradas de CA del controlador
bits 0-3 Configuracin de entradas lgicas de CA del controlador (consulte
DT_ACInputSetting, pgina 461)
bits 4-15 (Reservados)
Uso
496 1639505 06/2009
546 UInt Ajuste de sobrecarga trmica B
bits 0-2 Motor-tipo de sensor de temperatura:
0 = Ninguno
1 = PTC binario
2 = PT100
3 = PTC analgico
4 = NTC analgico
bits 3-4 Sobrecarga trmica-modo:
0 = Definitiva
2 = Trmica inversa
bits 5-15 (Reservados)
547 UInt Sobrecarga trmica-tiempo sobrepasado definitivo de fallo
548 (Reservado)
549 UInt Motor-umbral de fallo de sensor de temperatura (x 0,1 ohm)
550 UInt Motor-umbral de advertencia de sensor de temperatura (x 0,1 ohm)
551 UInt Sensor de temperatura del motor - umbral de fallo en grados (C)
[0 - 200]
552 UInt Sensor de temperatura del motor - umbral de advertencia en grados (C)
[0 - 200]
553 UInt Ciclo rpido-tiempo sobrepasado de bloqueo (s)
554 (Reservado)
555 UInt Corriente-tiempo sobrepasado de prdida de fase
556 UInt Sobrecorriente-tiempo sobrepasado de fallo
557 UInt Sobrecorriente-umbral de fallo
558 UInt Sobrecorriente-umbral de advertencia
559 Palabra Registro de ajuste de fallo de corriente de tierra B
bit 0 Corriente de tierra-modo
bits 1-15 (Reservados)
560 UInt CT de tierra-primario
561 UInt CT de tierra-secundario
562 UInt Corriente de tierra externa-tiempo sobrepasado de fallo
563 UInt Corriente de tierra externa-umbral de fallo
564 UInt Corriente de tierra externa-umbral de advertencia
565 UInt Motor-tensin nominal 1
566 UInt Tensin-tiempo sobrepasado de fallo de desequilibrio de fases en arranque 1
567 UInt Tensin-tiempo sobrepasado de fallo de desequilibrio de fases en marcha 1
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
1639505 06/2009 497
568 UInt Tensin-umbral de fallo de desequilibrio de fases 1
569 UInt Tensin-umbral de advertencia de desequilibrio de fases 1
570 UInt Sobretensin-tiempo sobrepasado de fallo 1
571 UInt Sobretensin-umbral de fallo 1
572 UInt Sobretensin-umbral de advertencia 1
573 UInt Infratensin-tiempo sobrepasado de fallo 1
574 UInt Infratensin-umbral de fallo 1
575 UInt Infratensin-umbral de advertencia 1
576 UInt Tensin-tiempo sobrepasado de fallo de prdida de fase 1
577 Palabra Ajuste de cada de tensin 1
bits 0-1 Modo cada de tensin
0 = Ninguno (predeterminado)
1 = Descarga
2 = Rearranque automtico
bits 2-15 (Reservados)
578 UInt Descarga-tiempo sobrepasado 1
579 UInt Umbral de cada de tensin
[50 - 115, valor predeterminado = 65]
1
580 UInt Tiempo sobrepasado de rearranque por cada de tensin (s)
[0 - 999, valor predeterminado = 2]
1
581 UInt Umbral de rearranque por cada de tensin
[65 - 115, valor predeterminado = 90]
1
582 UInt Tiempo sobrepasado de rearranque automtico inmediato (x 0,1 s)
[0 - 4, valor predeterminado = 2]
583 UInt Motor-potencia nominal 1
584 UInt Potencia excesiva-tiempo sobrepasado de fallo 1
585 UInt Potencia excesiva-umbral de fallo 1
586 UInt Potencia excesiva-umbral de advertencia 1
587 UInt Potencia insuficiente-tiempo sobrepasado de fallo 1
588 UInt Potencia insuficiente-umbral de fallo 1
589 UInt Potencia insuficiente-umbral de advertencia 1
590 UInt Factor de potencia insuficiente-tiempo sobrepasado de fallo 1
591 UInt Factor de potencia insuficiente-umbral de fallo 1
592 UInt Factor de potencia insuficiente-umbral de advertencia 1
593 UInt Factor de potencia excesivo-tiempo sobrepasado de fallo 1
594 UInt Factor de potencia excesivo-umbral de fallo 1
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
498 1639505 06/2009
595 UInt Factor de potencia excesivo-umbral de advertencia 1
596 UInt Tiempo sobrepasado de rearranque automtico con retardo (s)
[0 - 301, valor predeterminado = 4]
597-599 (Reservados)
600 (Sin significado)
601 Palabra Registro 1 de configuracin general
bit 0 Controlador-configuracin necesaria de sistema:
0 = Salir del men de configuracin
1 = Ir al men de configuracin
A
bits 1-7 (Reservados)
Configuracin del modo de control, bits 8-10 (un bit se establece en 1):
bit 8 Configuracin mediante teclado de HMI-activacin
bit 9 Configuracin mediante herramienta HMI-activacin
bit 10 Configuracin mediante puerto de red-activacin
bit 11 Motor estrella-tringulo B
bit 12 Motor-secuencia de fases:
0 = A B C
1 = A C B
bits 13-14 Motor-fases (consulte DT_PhaseNumber, pgina 468) B
bit 15 Motor-refrigeracin por ventilador auxiliar (valor predeterminado = 0)
602 Palabra Registro 2 de configuracin general
bits 0-2 Fallo-modo de reinicio (consulte DT_ResetMode, pgina 469) C
bit 3 HMI-ajuste de paridad de puerto:
0 = Ninguno
1 = Par (predeterminado)
bits 4-8 (Reservados)
bit 9 HMI-ajuste endian de puerto
0 = la palabra menos significativa primero
1 = la palabra ms significativa primero (big endian) (predeterminado)
bit 10 Puerto de red-ajuste endian
0 = la palabra menos significativa primero
1 = la palabra ms significativa primero (big endian) (predeterminado)
bit 11 HMI - color de LED de estado del motor
bits 12-15 (Reservados)
603 Ulnt HMI-ajuste de direccin de puerto
604 Ulnt HMI-ajuste de velocidad de transmisin en baudios del puerto
[9600 - 19.200, valor predeterminado = 19.200]
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
1639505 06/2009 499
605 (Reservado)
606 Ulnt Motor-clase de disparo
607 (Reservado)
608 Ulnt Sobrecarga trmica-umbral de reinicio tras fallo
609 Ulnt Sobrecarga trmica-umbral de advertencia
610 UInt Corriente de tierra interna-tiempo sobrepasado de fallo
611 UInt Corriente de tierra interna-umbral de fallo
612 UInt Corriente de tierra interna-umbral de advertencia
613 UInt Corriente-tiempo sobrepasado de fallo de desequilibrio de fases en
arranque
614 UInt Corriente-tiempo sobrepasado de fallo de desequilibrio de fases en marcha
615 UInt Corriente-umbral de fallo de desequilibrio de fases
616 UInt Corriente-umbral de advertencia de desequilibrio de fases
617 UInt Agarrotamiento-tiempo sobrepasado de fallo
618 UInt Agarrotamiento-umbral de fallo
619 UInt Agarrotamiento-umbral de advertencia
620 UInt Infracorriente-tiempo sobrepasado de fallo
621 UInt Fallo de infracorriente-umbral
622 UInt Infracorriente-umbral de advertencia
623 UInt Arranque prolongado-tiempo sobrepasado de fallo
624 UInt Arranque prolongado-umbral de fallo
625 (Reservado)
626 UInt HMI-registro de ajuste de contraste de visualizacin
bits 0-7 HMI-visualizacin de ajuste de contraste
bits 8-15 HMI-ajuste de brillo de visualizacin
627 UInt Contactor-calibre
628 UInt CT de carga-primario B
629 UInt CT de carga-secundario B
630 UInt CT de carga-mltiples pasos B
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
500 1639505 06/2009
631 Palabra Registro 1 de activacin de fallos
bits 0-1 (Reservados)
bit 2 Corriente de tierra-activacin de fallo
bit 3 Sobrecarga trmica-activacin de fallo
bit 4 Arranque prolongado-activacin de fallo
bit 5 Agarrotamiento-activacin de fallo
bit 6 Corriente-activacin de fallo de desequilibrio de fases
bit 7 Fallo de infracorriente-activacin
bit 8 (Reservado)
bit 9 Comprobacin automtica-activacin
0 = Desactivada
1 = Activada (predeterminado)
bit 10 HMI-activacin de fallo de puerto
bits 11-14 (Reservados)
bit 15 Puerto de red-activacin de fallo
632 Palabra Registro 1 de activacin de advertencias
bit 0 (Sin significado)
bit 1 (Reservado)
bit 2 Corriente de tierra-activacin de advertencia
bit 3 Sobrecarga trmica-activacin de advertencia
bit 4 (Reservado)
bit 5 Agarrotamiento-activacin de advertencia
bit 6 Corriente-activacin de advertencia de desequilibrio de fases
bit 7 Infracorriente-advertencia activacin
bits 8-9 (Reservados)
bit 10 HMI-activacin de advertencia de puerto
bit 11 Controlador-activacin de advertencia de temperatura interna
bits 12-14 (Reservados)
bit 15 Puerto de red-activacin de advertencia
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
1639505 06/2009 501
633 Palabra Registro 2 de activacin de fallos
bit 0 (Reservado)
bit 1 Diagnstico-activacin de fallo
bit 2 Cableado-activacin de fallo
bit 3 Sobreintensidad-activacin de fallo
bit 4 Corriente-activacin de fallo de prdida de fase
bit 5 Corriente-activacin de fallo de inversin de fases
bit 6 Motor-activacin de fallo de sensor de temperatura
bit 7 Tensin-activacin de fallo de desequilibrio de fases 1
bit 8 Tensin-activacin de fallo de prdida de fase 1
bit 9 Tensin-activacin de fallo de inversin de fase 1
bit 10 Infratensin-activacin de fallo 1
bit 11 Sobretensin-activacin de fallo 1
bit 12 Potencia insuficiente-activacin de fallo 1
bit 13 Potencia excesiva-activacin de fallo 1
bit 14 Factor de potencia insuficiente-activacin de fallo 1
bit 15 Factor de potencia excesivo-activacin de fallo 1
634 Palabra Registro 2 de activacin de advertencias
bit 0 (Reservado)
bit 1 Diagnstico-activacin de advertencia
bit 2 (Reservado)
bit 3 Sobrecorriente-activacin de advertencia
bit 4 Corriente-activacin de advertencia de prdida de fase
bit 5 (Reservado)
bit 6 Motor-activacin de advertencia de sensor de temperatura
bit 7 Tensin-activacin de advertencia de desequilibrio de fases 1
bit 8 Tensin-activacin de advertencia de prdida de fase 1
bit 9 (Reservado) 1
bit 10 Infratensin-activacin de advertencia 1
bit 11 Sobretensin-activacin de advertencia 1
bit 12 Potencia insuficiente-activacin de advertencia 1
bit 13 Potencia excesiva-activacin de advertencia 1
bit 14 Factor de potencia insuficiente-activacin de advertencia 1
bit 15 Factor de potencia excesivo-activacin de advertencia 1
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
502 1639505 06/2009
635-636 (Reservados)
637 UInt Reinicio automtico-ajuste intentos grupo 1
638 UInt Reinicio automtico-tiempo sobrepasado de grupo 1
639 UInt Reinicio automtico-ajuste intentos grupo 2
640 UInt Reinicio automtico-tiempo sobrepasado de grupo 2
641 UInt Reinicio automtico-ajuste intentos grupo 3
642 UInt Reinicio automtico-tiempo sobrepasado de grupo 3
643 UInt Motor-tiempo sobrepasado de paso 1 a 2
644 UInt Motor-umbral de paso 1 a 2
645 UInt HMI-ajuste de recuperacin de puerto (consulte
DT_OutputFallbackStrategy, pgina 468)
646-649 (Reservados)
Registro Tipo de
variable
Variables de lectura/escritura Nota,
pgina 457
Uso
1639505 06/2009 503
Variables de ajuste
A continuacin se describen las variables de ajuste:
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
650 Palabra HMI-registro de ajuste de idioma:
bits 0-4 HMI-ajuste de idioma (consulte DT_Language5,
pgina 468)
bits 5-15 (Sin significado)
651 Palabra HMI-registro 1 de elementos de visualizacin
bit 0 HMI-activacin de visualizacin de corriente media
bit 1 HMI-activacin de visualizacin de nivel de capacidad
trmica
bit 2 HMI-activacin de visualizacin de corriente L1
bit 3 HMI-activacin de visualizacin de corriente L2
bit 4 HMI-activacin de visualizacin de corriente L3
bit 5 HMI-activacin de visualizacin de corriente de tierra
bit 6 HMI-activacin de visualizacin de estado del motor
bit 7 HMI-activacin de visualizacin de desequilibrio de
fases de corriente
bit 8 HMI-activacin de visualizacin de tiempo de
funcionamiento
bit 9 HMI-activacin de visualizacin de estado E/S
bit 10 HMI-activacin de visualizacin de potencia reactiva
bit 11 HMI-activacin de visualizacin de frecuencia
bit 12 HMI-activacin de visualizacin de arranques por
hora
bit 13 HMI-activacin de visualizacin del modo de control
bit 14 HMI-activacin de visualizacin de histricos de inicio
bit 15 HMI-activacin de sensor de temperatura del motor
652 Ulnt Motor-relacin de corriente a plena carga (FLC1)
653 Ulnt Motor-relacin de corriente a plena carga y alta velocidad
(FLC2)
Uso
504 1639505 06/2009
654 Palabra HMI-registro 2 de elementos de visualizacin
bit 0 HMI-activacin de visualizacin de tensin L1-L2 1
bit 1 HMI-activacin de visualizacin de tensin L2-L3 1
bit 2 HMI-activacin de visualizacin de tensin L3-L1 1
bit 3 HMI-activacin de visualizacin de tensin media 1
bit 4 HMI-activacin de visualizacin de potencia 1
bit 5 HMI-activacin de visualizacin de consumo 1
bit 6 HMI-activacin de factor de potencia 1
bit 7 HMI-activacin de visualizacin de relacin de
corriente media
bit 8 HMI-activacin de visualizacin de relacin de
corriente L1
1
bit 9 HMI-activacin de visualizacin de relacin de
corriente L2
1
bit 10 HMI-activacin de visualizacin de relacin de
corriente L3
1
bit 11 HMI-activacin de visualizacin de capacidad trmica
restante
bit 12 HMI-activacin de visualizacin de tiempo hasta el
disparo
bit 13 HMI-activacin de visualizacin de desequilibrio de
fases de tensin
1
bit 14 HMI-activacin de visualizacin de fecha
bit 15 HMI-activacin de visualizacin de tiempo
655-658 Palabra[4] Ajuste de fecha y hora
(consulte DT_DateTime, pgina 463)
659 Palabra HMI-registro 3 de elementos de visualizacin
bit 0 Visualizacin en HMI - sensor de temperatura en
grados CF
bits 1-15 (Reservados)
660-681 (Reservados)
682 Ulnt Puerto de red-ajuste de recuperacin (consulte
DT_OutputFallbackStrategy, pgina 468)
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
Uso
1639505 06/2009 505
683 Palabra Registro de ajuste de control (vase pgina 185)
bits 0-1 (Reservados)
bit 2 Modo local predeterminado de control a distancia (con
LTM CU)
0 = A distancia
1 = Local
bit 3 (Reservado)
bit 4 Activacin de los botones locales de control a distancia
(con LTM CU)
0 = Desactivado
1 = Activado
bits 5-6 Ajuste del canal de control a distancia (con
LTM CU)
0 = Red
1 = Bornero de conexin
2 = HMI
bit 7 (Reservado)
bit 8 Control de ajuste de canal local
0 = Bornero de conexin
1 = HMI
bit 9 Control de transicin directa
0 = Parada necesaria durante la transicin
1 = Parada no necesaria durante la transicin
bit 10 Modo de transferencia de control
0 = Con sacudidas
1 = Sin sacudidas
bit 11 Detencin de la desactivacin del bornero de
conexin
0 = Activada
1 = Desactivada
bit 12 Detencin de la desactivacin de HMI
0 = Activada
1 = Desactivada
bits 13-15 (Reservados)
684-689 (Reservado)
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
Uso
506 1639505 06/2009
690 Palabra bits 0-1 Ajuste del tipo de trama del puerto de red:
0 = Ethernet II
1 = 802.3
bit 2 Desactivacin FDR del puerto de red:
0 = el servicio FDR puede activarse (si los conmutadores
rotatorios estn ajustados en el modo DHCP)
1 = el servicio FDR est desactivado
bit 3 Activacin de la copia de seguridad automtica FDR
del puerto de red:
0 = no sincro
1 = copia de seguridad automtica
bits 4-15 (Reservados)
691 Palabra Ajuste 1 de la desviacin SNMP del puerto de red
bit 0 Activacin del arranque en fro de la desviacin SNMP
del puerto de red
bit 1 Activacin del arranque en caliente de la desviacin
SNMP del puerto de red
bit 2 Activacin del enlace descendente de la desviacin de
SNMP del puerto de red
bit 3 Activacin del enlace ascendente de la desviacin
SNMP del puerto de red
bit 4 Activacin del error de autentificacin de la desviacin
SNMP del puerto de red
bit 5 Activacin de las prdidas del entorno de la desviacin
SNMP del puerto de red
bit 6 Activacin de la desviacin SNMP de puerto de red
especfico de empresa 1
bits 7-15 (Reservados)
692 (Reservado)
693 Ulnt Puerto de red-tiempo sobrepasado de prdida de
comunicaciones
694 - 696 (Reservados)
697 Ulnt Ajuste de la periodicidad de la copia de seguridad
automtica FDR del puerto de red
698-699 (Sin significado)
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
Uso
1639505 06/2009 507
Variables de ajuste ampliadas
A continuacin se describen las variables de ajuste ampliadas:
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
3000-3001 UDlnt Ajuste de direccin IP Ethernet
3002-3003 UDlnt Ajuste de mscara de subred Ethernet
3004-3005 UDlnt Ajuste de direccin de pasarela Ethernet
3006-3009 (Reservados)
3010-3011 UDlnt Ajuste de direccin IP Ethernet maestra
3012-3013 UDlnt Ajuste de direccin 1 de administrador SNMP Ethernet
3014-3015 UDlnt Ajuste de direccin 2 de administrador SNMP Ethernet
3016-3031 Palabra(16) Ajuste de nombre del sistema SNMP Ethernet
3032-3047 Palabra(16) Ajuste de ubicacin del sistema SNMP Ethernet
3048-3063 Palabra(16) Ajuste de contacto del sistema SNMP Ethernet
3064-3071 Palabra(8) Ajuste de obtencin de nombre de comunidad SNMP
Ethernet
3072-3079 Palabra(8) Ajuste de nombre de comunidad SNMP Ethernet
3080-3087 Palabra(8) Ajuste de desviacin del nombre de comunidad SNMP
Ethernet
3088-3499 (Reservados)
Uso
508 1639505 06/2009
Variables de comandos
Variables de comandos
A continuacin se describen las variables de comandos:
Registro Tipo de variable Variables de lectura/escritura Nota,
pgina 457
700 Palabra Registro de comandos de salidas lgicas
bit 0 Salida lgica 1-comando
bit 1 Salida lgica 2-comando
bit 2 Salida lgica 3-comando
bit 3 Salida lgica 4-comando
bit 4 Salida lgica 5-comando 1
bit 5 Salida lgica 6-comando 1
bit 6 Salida lgica 7-comando 1
bit 7 Salida lgica 8-comando 1
bits 8-15 (Reservados)
701-703 (Reservado)
704 Palabra Registro de control 1
bit 0 Motor-comando de funcionamiento hacia delante
bit 1 Motor-comando de funcionamiento hacia atrs
bit 2 (Reservado)
bit 3 Fallo-comando de reinicio
bit 4 (Reservado)
bit 5 Comprobacin automtica-comando
bit 6 Motor-comando de baja velocidad
bits 7-15 (Reservados)
Uso
1639505 06/2009 509
705 Palabra Registro de control 2
bit 0 Borrar todo-comando
Borrar todos los parmetros, excepto:
Motor-nmero de arranques L01
Motor-nmero de arranques L02
Controlador-temperatura interna mx.
Nivel de capacidad trmica
bit 1 Borrar histricos-comando
bit 2 Borrar nivel de capacidad trmica-comando
bit 3 Borrar configuracin del controlador-comando
bit 4 Borrar configuracin de puerto de red-comando
bit 5 Comando de copia de seguridad de datos FDR D
bit 6 Comando de restauracin de datos FDR D
bits 7-15 (Reservados)
706-709 (Reservados)
710-799 (Olvidado)
Registro Tipo de variable Variables de lectura/escritura Nota,
pgina 457
Uso
510 1639505 06/2009
Variables de mapa de usuario
Variables de mapa de usuario
A continuacin se describen las variables de mapa de usuario:
Grupos de variables de mapa de
usuario
Registros
Mapa de usuario-direcciones 800 a 899
Mapa de usuario-valores 900 a 999
Registro Tipo de variable Variables de lectura/escritura Nota, pgina 457
800-898 Palabra[99] Mapa de usuario-direcciones
899 (Reservado)
Registro Tipo de variable Variables de lectura/escritura Nota, pgina 457
900-998 Palabra[99] Mapa de usuario-valores
999 (Reservado)
Uso
1639505 06/2009 511
Variables de lgica personalizada
Variables de lgica personalizada
A continuacin se describen las variables de lgica personalizada:
Registro Tipo de
variable
Variables de slo lectura Nota, pgina 457
1200 Palabra Registro de estado de lgica personalizada
bit 0 Lgica personalizada-marcha
bit 1 Lgica personalizada-parada
bit 2 Lgica personalizada-reinicio
bit 3 Segundo paso de lgica personalizada
bit 4 Lgica personalizada-transicin
bit 5 Lgica personalizada-inversin de fases
bit 6 Lgica personalizada-control de red
bit 7 Lgica personalizada-seleccin de FLC
bit 8 (Reservado)
bit 9 Lgica personalizada-LED aux. 1
bit 10 Lgica personalizada-LED aux. 2
bit 11 Lgica personalizada-LED de detencin
bit 12 Lgica personalizada-LO1
bit 13 Lgica personalizada-LO2
bit 14 Lgica personalizada-LO3
bit 15 Lgica personalizada-LO4
1201 Palabra Lgica personalizada-versin
1202 Palabra Lgica personalizada-espacio de memoria
1203 Palabra Lgica personalizada-memoria utilizada
1204 Palabra Lgica personalizada-espacio temporal
1205 Palabra Lgica personalizada-espacio no voltil
1206-1300 (Reservado)
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
1301-1399 Palabra[99] Registros de uso general de las funciones lgicas
Uso
512 1639505 06/2009
Registros de mirroring
Registros de mirroring
Los registros de mirroring se actualizan para presentar, en una serie de registros
contiguos, los valores de otros estados de prioridad alta, E/S y registros de control,
de la siguiente manera:
Registro Tipo de
variable
Variables de slo lectura Nota, pgina 457
2500 Palabra Registro de estado mirror
bit 0 Renovacin de tabla de entradas
0 = la tabla se ha ledo en 100 ms
1 = la tabla no se ha ledo en 100 ms
bit 1 Validez de la tabla de entradas
0 = los datos de la tabla no son vlidos
1 = los datos de la tabla son vlidos
bit 2 Cambio de la tabla de entradas
0 = los datos de la tabla no se han cambiado desde la
ltima lectura
1 = los datos de la tabla se han cambiado desde la ltima
lectura
bits 3-7 (Reservados)
bit 8 Renovacin de la tabla de salidas
0 = la tabla se ha ledo en 100 ms
1 = la tabla no se ha ledo en 100 ms
bit 9 Validez de la tabla de salidas
0 = los datos de la tabla no son vlidos
1 = los datos de la tabla son vlidos
bit 10 Cambio de la tabla de salidas
0 = los datos de la tabla no se han cambiado desde la
ltima lectura
1 = los datos de la tabla se han cambiado desde la ltima
lectura
bits 11-15 (Reservados)
2501 Palabra (Reservado)
Uso
1639505 06/2009 513
2502 Palabra mirrors Registro 1 de estado del sistema (455)
bit 0 mirrors Sistema-listo (455.0)
bit 1 mirrors Sistema-activado (455.1)
bit 2 mirrors Sistema-fallo (455.2)
bit 3 mirrors Sistema-advertencia (455.3)
bit 4 mirrors Sistema-disparado (455.4)
bit 5 mirrors Fallo-reinicio autorizado (455.5)
bit 6 mirrors Controlador-potencia (455.6)
bit 7 mirrors Motor-en marcha (455.7)
(con deteccin de corriente, si es superior al 10% de FLC)
bits 8-13 mirrors Motor-relacin de corriente media (455.8-
13)
32 = 100% FLC - 63 = 200% FLC
bit 14 mirrors Control mediante HMI (455.14)
bit 15 mirrors Motor-en arranque (arranque en curso)
(455.15)
0 = la corriente de bajada es inferior al 150% de FLC
1 = la corriente de subida es superior al 10% de FLC
2503 Palabra mirrors Registro 2 de estado del sistema (456)
bit 0 mirrors Reinicio automtico-activo (456.0)
bit 1 (Sin significado)
bit 2 mirrors Fallo-peticin de apagar y encender (456.2)
bit 3 mirrors Motor-tiempo de reinicio indeterminado
(456.3)
bit 4 mirrors Ciclo rpido-bloqueo (456.4)
bit 5 mirrors Descarga (456.5) 1
bit 6 mirrors Motor-velocidad (456.6)
Parmetro utilizado 0 = FLC1
Parmetro utilizado 1 = FLC2
bit 7 mirrors HMI-prdida de comunicacin con el puerto
(456.7)
bit 8 mirrors Puerto de red-prdida de comunicaciones
(456.8)
bit 9 mirrors Motor-bloqueo transicin (456.9)
bits 10-15 (Sin significado)
Registro Tipo de
variable
Variables de slo lectura Nota, pgina 457
Uso
514 1639505 06/2009
2504 Palabra mirrors Estado de entradas lgicas (457)
bit 0 mirrors Lgica-entrada 1 (457.0)
bit 1 mirrors Lgica-entrada 2 (457.1)
bit 2 mirrors Lgica-entrada 3 (457.2)
bit 3 mirrors Lgica-entrada 4 (457.3)
bit 4 mirrors Lgica-entrada 5 (457.4)
bit 5 mirrors Lgica-entrada 6 (457.5)
bit 6 mirrors Lgica-entrada 7 (457.6)
bit 7 mirrors Lgica-entrada 8 (457.7) 1
bit 8 mirrors Lgica-entrada 9 (457.8) 1
bit 9 mirrors Lgica-entrada 10 (457.9) 1
bit 10 mirrors Lgica-entrada 11 (457.10) 1
bit 11 mirrors Lgica-entrada 12 (457.11) 1
bit 12 mirrors Lgica-entrada 13 (457.12) 1
bit 13 mirrors Lgica-entrada 14 (457.13) 1
bit 14 mirrors Lgica-entrada 15 (457.14) 1
bit 15 mirrors Lgica-entrada 16 (457.15) 1
2505 Palabra Estado de salidas lgicas (458)
bit 0 mirrors Lgica-salida 1 (458.0)
bit 1 mirrors Lgica-salida 2 (458.1)
bit 2 mirrors Lgica-salida 3 (458.2)
bit 3 mirrors Lgica-salida 4 (458.3)
bit 4 mirrors Lgica-salida 5 (458.4) 1
bit 5 mirrors Lgica-salida 6 (458.5) 1
bit 6 mirrors Lgica-salida 7 (458.6) 1
bit 7 mirrors Lgica-salida 8 (458.7) 1
bits 8-15 (Reservados)
Registro Tipo de
variable
Variables de slo lectura Nota, pgina 457
Uso
1639505 06/2009 515
Registro Tipo de
variable
Variables de lectura/escritura Nota, pgina 457
2506 Palabra Registro de comandos de salidas lgicas (700)
bit 0 mirrors Salida lgica 1-comando (700.0)
bit 1 mirrors Salida lgica 2-comando (700.1)
bit 2 mirrors Salida lgica 3-comando (700.2)
bit 3 mirrors Salida lgica 4-comando (700.3)
bit 4 mirrors Salida lgica 5-comando (700.4) 1
bit 5 mirrors Salida lgica 6-comando (700.5) 1
bit 6 mirrors Salida lgica 7-comando (700.6) 1
bit 7 mirrors Salida lgica 8-comando (700.7) 1
bits 8-15 (Reservados)
2507 Palabra Registro de control 1 (704)
bit 0 mirrors Comando de marcha hacia delante del motor
(704.0)
bit 1 mirrors Comando de marcha hacia atrs del motor
(704.1)
bit 2 (Reservado)
bit 3 mirrors Fallo-comando de reinicio (704.3)
bit 4 (Reservado)
bit 5 mirrors Comprobacin automtica-comando (704.5)
bit 6 mirrors Motor-comando de baja velocidad (704.5)
bits 7-15 (Reservados)
2508 Palabra Comando de salida analgica 1 (706)
2509 - 2599 Palabras
(491)
(Reservado)
Uso
516 1639505 06/2009
7.8 Utilizar la interfaz de usuario del servidor web
estndar
Descripcin general
En esta seccin se describen las funciones de las pginas del servidor web
estndar y la forma de usar los datos para utilizar un controlador LTM R con o sin
un mdulo de expansin LTM E.
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Descripcin de la interfaz de usuario del servidor web estndar 517
Pgina Inicio 523
Pgina Login 525
Pgina Documentacin 527
Pgina Visualizacin 528
Pgina Estado de producto 529
Pgina Medicin 531
Pgina Diagnstico 533
Pgina Diagnstico Bsico Ethernet 535
Pgina Diagnstico Ampliado Ethernet 536
Pgina Fallos y advertencias 538
Pgina Resea histrica de los fallos 542
Pgina Mantenimiento 544
Pgina Contador 545
Pgina Configuracin 547
Pgina Configuracin trmica del producto 549
Pgina Parmetros de corriente del producto 551
Pgina Parmetros de tensin del producto 554
Pgina Parmetros de potencia del producto 557
Pgina Contrasea 559
Uso
1639505 06/2009 517
Descripcin de la interfaz de usuario del servidor web estndar
Descripcin general
Las pginas del servidor web estndar proporcionan una HMI integrada en el
LTM R a la que se puede acceder con el explorador web estndar admitido por:
MS Internet Explorer versin 6 o posterior
Mozilla Firefox versin 3 o posterior
Uso
518 1639505 06/2009
Funciones de la interfaz de usuario del servidor web estndar
En la tabla siguiente se describen todas las funciones de las pginas del servidor
web. Algunas funciones estn disponibles en funcin de la configuracin (por
ejemplo, hay funciones que slo estn disponibles si est conectado el LTM E).
Men Informacin mostrada Funcin
INICIO Pgina Inicio Identificacin de los productos conectados: controlador
LTM R con/sin mdulo de expansin LTM E
Idioma Visualizacin de las pginas en el idioma seleccionado
Identificacin Activacin y desactivacin del modo de modificacin de
datos
DOCUMENTACIN Referencias Enlace al sitio web http://www.schneider-electric.com
VISUALIZACIN Estado de producto Visualizacin de informacin de estado de entrada/salida y
de estado interno del producto
Medicin Visualizacin de datos medidos con valor numrico y
representacin grfica
DIAGNSTICO Diagnstico Bsico Ethernet Visualizacin de informacin de la direccin y el FDR
Diagnstico Ampliado Ethernet Visualizacin y puesta a cero (protegida por contrasea) de
los histricos de comunicacin de cada puerto
Fallos y advertencias Visualizacin del estado de fallo y advertencia y del nmero
de fallos, si los hubiere, de cada uno de los datos, y puesta
a cero (protegida por contrasea) del nmero de fallos
Resea histrica de los fallos Visualizacin y puesta a cero (protegida por contrasea)
del historial de fallos de corriente, tensin, potencia y
trmicos
MANTENIMIENTO Contador Visualizacin y puesta a cero (protegida por contrasea) de
histricos
CONFIGURACIN Configuracin trmica Visualizacin y modificacin (protegida por contrasea) de
los parmetros trmicos editables
Parmetros de corriente Visualizacin y modificacin (protegida por contrasea) de
los parmetros de corriente editables
Parmetros de tensin Visualizacin y modificacin (protegida por contrasea) de
los parmetros de tensin editables
Parmetros de potencia Visualizacin y modificacin (protegida por contrasea) de
los parmetros de potencia editables
Contrasea Modificacin de la contrasea utilizada para editar datos
Uso
1639505 06/2009 519
Estructura del servidor web estndar
En el diagrama siguiente se muestra la navegacin por las pginas del servidor web
estndar:
Uso
520 1639505 06/2009
Acceso al servidor web estndar
Paso Accin
1 Conecte el controlador LTM R Modbus/TCP al PC.
2 Abra un explorador web.
3 En la barra de direcciones, introduzca la direccin IP asignada al controlador LTM R. En caso necesario,
consulte el procedimiento de direccionamiento IP del LTM R, (vase pgina 407)
4 Si se acepta la conexin, se mostrar la pgina Inicio. Podr navegar por las distintas pginas a travs
de mens y submens.
5 Si desea modificar los valores de los parmetros, introduzca su contrasea haciendo clic en Login en el
men Inicio.
Para obtener informacin acerca de:
Introducir la contrasea, consulte la pgina Login (vase pgina 525)
Cambiar la contrasea, consulte la pgina Contrasea (vase pgina 559)
Uso
1639505 06/2009 521
Interfaz de usuario del servidor web estndar
Todas las pginas del servidor web presentan el mismo aspecto. Una ventana se
divide en tres zonas, como se muestra a continuacin:
Uso
522 1639505 06/2009
Botn Borrar contadores
El botn Borrar contadores aparece en las siguientes pginas:
Pgina Diagnstico Ampliado Ethernet
Pgina Fallos y advertencias de Diagnstico
Pgina Resea histrica de los fallos
Pgina Contador
Al hacer clic en este botn (si est habilitado), se ejecuta Borrar histricos-comando
y los histricos del controlador LTM R se ponen a cero. As pues, los siguientes
parmetros se ponen a cero en las pginas del servidor web:
Todos los histricos de la pgina Diagnstico Ampliado Ethernet.
Todos los contadores de fallos de la pgina Fallos y advertencias de Diagnstico.
Los 5 registros de fallos de la pgina Resea histrica de los fallos.
El tiempo de funcionamiento y los contadores de arranque del motor de la pgina
Contador.
El botn Borrar contadores est:
Deshabilitado de forma predeterminada.
Habilitado en modo de modificacin (despus de introducir la contrasea
correcta en la pgina Login).
Leyenda Zona Descripcin
1 Mens Encabezado que aparece en cada pgina y que muestra enlaces a los mens:
Inicio
Documentacin
Visualizacin
Diagnstico
Mantenimiento
Configuracin
2 Vista en rbol de los
submens
Enlaza a las pginas relacionadas con el men seleccionado.
La vista en rbol:
Siempre muestra el nombre del men en el que el usuario est navegando.
Permite al usuario abrir o cerrar funciones.
3 Cuerpo de la pgina Informacin relacionada con la pgina contextual seleccionada en el men o
submen.
Uso
1639505 06/2009 523
Pgina Inicio
Descripcin general
Acceso a la pgina Inicio
La pgina Inicio aparece:
Despus de conectar con el servidor Web estndar.
Al hacer clic en Inicio en las cabeceras de men en cualquier momento durante
la navegacin y desde cualquier pgina mostrada.
Uso
524 1639505 06/2009
Submen de la pgina Inicio
El submen de la pgina Inicio contiene los siguientes elementos:
Seleccin de idioma
En la zona de submens, haga clic en uno de los siguientes idiomas para visualizar
el contenido de la pgina en ese idioma:
Ingls
Francs
Espaol
Personalizado (ingls de forma predeterminada)
Logout
Haga clic en Logout para deshabilitar el modo de modificacin.
Cuerpo de la pgina Inicio
La pgina Inicio muestra los siguientes elementos de producto:
Una vista del controlador LTM R y el mdulo de expansin LTM E
Datos del controlador LTM R:
Nombre de proveedor: Schneider Electric
Referencia comercial
Versin
Versin de la interfaz de comunicacin
Datos del mdulo de expansin LTM E:
Referencia comercial
Versin
NOTA: Los datos del LTM E estn en blanco si no hay ningn LTM E conectado.
Nivel 1 Nivel 2 Funcin
Idiomas English Cambia el idioma de la pgina a ingls.
French Cambia el idioma de la pgina a francs.
Spanish Cambia el idioma de la pgina a espaol.
Personalizado Cambia el idioma de la pgina al idioma personalizado (ingls
de forma predeterminada).
Identificacin Login Muestra la pgina Login para introducir la contrasea
(vase pgina 525)
Logout Desactiva el modo de modificacin de datos.
Uso
1639505 06/2009 525
Pgina Login
Descripcin general
Cuerpo de la pgina Login
De forma predeterminada, la proteccin por contrasea est deshabilitada y el
modo de modificacin no est protegido.
Si la proteccin por contrasea est habilitada, la pgina Login le permite introducir
el nombre de usuario y la contrasea necesarios para activar el modo de
modificacin:
El nombre de usuario es "USER" (en maysculas).
La contrasea es un entero, de 0001 a 9999.
La proteccin por contrasea se puede habilitar o deshabilitar y la contrasea se
puede cambiar en la pgina Contrasea (vase pgina 559)
NOTA: La contrasea de las pginas web es la misma que la del LTM CU.
Uso
526 1639505 06/2009
Salir del modo de modificacin
Para salir del modo de modificacin y deshabilitar la contrasea:
Haga clic en Logout en el submen Identificacin de la pgina Inicio, o
Cierre el explorador web.
Uso
1639505 06/2009 527
Pgina Documentacin
Descripcin general
Acceso a la pgina Documentacin
La pgina Documentacin aparece al hacer clic en Documentacin en las
cabeceras de men en cualquier momento durante la navegacin y desde cualquier
pgina mostrada.
Submen de la pgina Documentacin
El submen de la pgina Documentacin permite acceder a la pgina Referencias.
Puede descargar las publicaciones tcnicas del LTM R y otra informacin tcnica
de nuestro sitio web www.schneider-electric.com por medio del hipervnculo de la
pgina Referencias.
Uso
528 1639505 06/2009
Pgina Visualizacin
Descripcin general
Acceso a la pgina Visualizacin
La pgina Visualizacin aparece al hacer clic en Visualizacin en las cabeceras de
men en cualquier momento durante la navegacin y desde cualquier pgina
mostrada.
Submen de la pgina Visualizacin
El submen de la pgina Visualizacin permite acceder a las pginas siguientes:
Estado de producto (vase pgina 529)
Medicin (vase pgina 531)
Uso
1639505 06/2009 529
Pgina Estado de producto
Descripcin general
Cuerpo de la pgina Estado de producto
La pgina muestra:
El estado de cada E/S relacionada con el pin del conector dedicado en la vista
del producto (controlador LTM R + mdulo de expansin LTM E).
Valores y estados generales.
Los indicadores de estado dependen de los siguientes cdigos de color:
Los estados inactivos estn en gris.
Los estados activos estn en verde, naranja o rojo, dependiendo de los datos.
Uso
530 1639505 06/2009
La pgina Estado de producto contiene los siguientes datos de slo lectura:
Nombre de datos Nombre del parmetro
LI1 Lgica-entrada 1
LI2 Lgica-entrada 2
LI3 Lgica-entrada 3
LI4 Lgica-entrada 4
LI5 Lgica-entrada 5
LI6 Lgica-entrada 6
LI7
(1)
Lgica-entrada 7
LI8
(1)
Lgica-entrada 8
LI9
(1)
Lgica-entrada 9
LI10
(1)
Lgica-entrada 10
LO1 Lgica-salida 1
LO2 Lgica-salida 2
LO3 Lgica-salida 3
LO4 Lgica-salida 4
Cableado-fallo Cableado-fallo
Sistema-listo Sistema-listo
Sistema-activado Sistema-activado
Sistema-fallo Sistema-fallo
Sistema-advertencia Sistema-advertencia
Fallo-reinicio autorizado Fallo-reinicio autorizado
Apagado y encendido necesario Apagado y encendido necesario
Mnimo-tiempo de espera Mnimo-tiempo de espera
Tiempo hasta fallo trmico Tiempo hasta el disparo
Motor-en arranque Motor-en arranque
Motor-en marcha Motor-en marcha
Velocidad alta Velocidad alta
Direccin 1
(2)
Direccin 1
Direccin 2
(2)
Direccin 2
Corriente media (% FLC) Corriente media
Corriente media (A) Corriente media
(1) Si no hay conectado ningn mdulo de expansin LTM E, el indicador es de color gris.
(2) El color en estado activo depende del valor del parmetro HMI - color de LED de estado del motor: rojo si el valor
es 0, verde si es 1.
Uso
1639505 06/2009 531
Pgina Medicin
Descripcin general
Uso
532 1639505 06/2009
Cuerpo de la pgina Medicin
La pgina muestra el valor numrico y la representacin grfica junto a cada
nombre de datos.
La pgina Medicin contiene los siguientes datos de slo lectura:
Nombre de
grupo
Nombre de datos Nombre del parmetro
Trmico Nivel de capacidad trmica Nivel de capacidad trmica
Motor-temperatura Grado del sensor de temperatura del motor:
El tipo de sensor de temperatura del motor es PT100.
La temperatura del motor se muestra en C o F en funcin
del valor del parmetro Visualizacin en HMI - sensor de
temperatura en grados CF.
Motor-sensor de temperatura en ohmios:
El tipo de sensor de temperatura del motor no es PT100.
La temperatura del motor se muestra en ohmios.
Corriente Corriente media Corriente media
Corriente de tierra Corriente de tierra
Corriente-desequilibrio de
fases
Corriente-desequilibrio de fases
Tensin
Tensin media
(1)
Tensin media
Frecuencia
(1)
Frecuencia
Tensin-desequilibrio de
fases
(1)
Tensin-desequilibrio de fases
Potencia
Potencia activa
(1)
Potencia activa
Factor de potencia
(1)
Factor de potencia
Potencia reactivo
(1)
Potencia reactiva
(1) No se muestra o est en blanco si no hay conectado ningn mdulo de expansin LTM E.
Uso
1639505 06/2009 533
Pgina Diagnstico
Descripcin general
Acceso a la pgina Diagnstico
La pgina Diagnstico aparece al hacer clic en Diagnstico en las cabeceras de
men en cualquier momento durante la navegacin y desde cualquier pgina
mostrada.
Uso
534 1639505 06/2009
Submen de la pgina Diagnstico
El submen de la pgina Diagnstico permite acceder a las pginas siguientes:
Nivel 1 Nivel 2
Ethernet Bsico (vase pgina 535)
Ampliado (vase pgina 536)
Producto Fallos y advertencias (vase pgina 538)
Resea histrica de los fallos (vase pgina 542)
Uso
1639505 06/2009 535
Pgina Diagnstico Bsico Ethernet
Descripcin general
Cuerpo de la pgina Diagnstico Bsico Ethernet
La pgina Diagnstico Bsico Ethernet contiene los siguientes datos de slo lectura:
Nombre de grupo Nombre de datos Nombre del parmetro
Direccin Direccin MAC Direccin MAC Ethernet
Direccin IP Direccin IP Ethernet
Mscara de subred Mscara de subred Ethernet
Direccin de pasarela Direccin de pasarela Ethernet
Estado de sustitucin de dispositivo
defectuoso
Nombre de dispositivo Nombre de dispositivo Ethernet
Estado FDR Estado FDR del puerto de red
Uso
536 1639505 06/2009
Pgina Diagnstico Ampliado Ethernet
Descripcin general
Cuerpo de la pgina Diagnstico Ampliado Ethernet
En la lista Nmero de puerto, seleccione el nmero de puerto Ethernet o introduzca
1 o 2 en el campo para visualizar el diagnstico relacionado.
El botn Borrar contadores, situado en la parte inferior de la pgina, se puede
utilizar para poner a cero todos los histricos, incluidos los contadores de histricos
Ethernet (vase pgina 522)
Uso
1639505 06/2009 537
La pgina Diagnstico Ampliado Ethernet contiene los siguientes datos de slo
lectura para cada puerto:
Nombre de grupo Nombre de datos
Histricos de transmisin Tramas transmitidas correctas
Colisiones
Colisiones excesivas
Errores de deteccin de portadora
Errores Tx MAC internos
Velocidad del enlace
Histricos de recepcin Tramas recibidas correctas
Error de alineacin
Errores de CRC
Errores de FCS
Histricos de colisin Colisiones tardas
Uso
538 1639505 06/2009
Pgina Fallos y advertencias
Descripcin general
Cuerpo de la pgina Fallos y advertencias
Los siguientes elementos se muestran junto a cada nombre de datos: el estado del
fallo o advertencia y el valor del contador de fallos, si lo hubiera.
El cdigo de color de los indicadores es el siguiente:
En caso de... El indicador es de color...
advertencia naranja
fallo rojo
fallo o advertencia inactivo gris
Uso
1639505 06/2009 539
El botn Borrar contadores, situado en la parte inferior de la pgina, se puede
utilizar para poner a cero todos los contadores de histricos y fallos
(vase pgina 522)
La pgina Fallos y advertencias contiene los siguientes datos de slo lectura:
Nombre de datos Tipo de indicador o contador de fallos Nombre del parmetro
Sobrecarga trmica Advertencia Sobrecarga trmica-advertencia
Fallo Sobrecarga trmica-fallo
Contador de fallos Sobrecarga trmica-nmero de fallos
Sensor de
temperatura externo
Advertencia Motor-advertencia de sensor de temperatura
Fallo Motor-fallo de sensor de temperatura
Contador de fallos Motor-nmero de fallos de sensor de temperatura
Corriente de tierra Advertencia Corriente de tierra-advertencia
Fallo Corriente de tierra-fallo
Contador de fallos Corriente de tierra-nmero de fallos
Desequilibrio de fases
corriente
Advertencia Corriente-advertencia de desequilibrio de fases
Fallo Corriente-fallo de desequilibrio de fases
Contador de fallos Corriente-nmero de fallos de desequilibrio de
fases
Prdida de fase
corriente
Advertencia Corriente-advertencia de prdida de fase
Fallo Corriente-fallo de prdida de fase
Contador de fallos Corriente-nmero de fallos de prdida de fase
Inversin de fases
corriente
Advertencia Corriente-advertencia de inversin de fases
Fallo Corriente-fallo de inversin de fases
Arranque prolongado Advertencia Arranque prolongado-advertencia
Fallo Arranque prolongado-fallo
Contador de fallos Arranque prolongado-nmero de fallos
Agarrotamiento Advertencia Agarrotamiento-advertencia
Fallo Agarrotamiento-fallo
Contador de fallos Agarrotamiento-nmero de fallos
Infracorriente Advertencia Infracorriente-advertencia
Fallo Fallo de infracorriente
Contador de fallos Infracorriente-nmero de fallos
Sobrecorriente Advertencia Sobrecorriente-advertencia
Fallo Sobrecorriente-fallo
Contador de fallos Sobrecorriente-nmero de fallos
Uso
540 1639505 06/2009
Tensin-desequilibrio
de fases
Advertencia Tensin-advertencia de desequilibrio de fases
Fallo Tensin-fallo de desequilibrio de fases
Contador de fallos Tensin-nmero de fallos de desequilibrio de fases
Tensin-prdida de
fase
Advertencia Tensin-advertencia de prdida de fase
Fallo Tensin-fallo de prdida de fase
Contador de fallos Tensin-nmero de fallos de prdida de fase
Tensin-inversin de
fase
Advertencia Tensin-advertencia de inversin de fase
Fallo Tensin-fallo de inversin de fase
Infratensin Advertencia Infratensin-advertencia
Fallo Infratensin-fallo
Contador de fallos Infratensin-nmero de fallos
Sobretensin Advertencia Sobretensin-advertencia
Fallo Sobretensin-fallo
Contador de fallos Sobretensin-nmero de fallos
Potencia insuficiente Advertencia Potencia insuficiente-advertencia
Fallo Potencia insuficiente-fallo
Contador de fallos Potencia insuficiente-nmero de fallos
Potencia excesiva Advertencia Potencia excesiva-advertencia
Fallo Potencia excesiva-fallo
Contador de fallos Potencia excesiva-nmero de fallos
Factor de potencia
insuficiente
Advertencia Factor de potencia insuficiente-advertencia
Fallo Factor de potencia insuficiente-fallo
Contador de fallos Factor de potencia insuficiente-nmero de fallos
Factor de potencia
excesivo
Advertencia Factor de potencia excesivo-advertencia
Fallo Factor de potencia excesivo-fallo
Contador de fallos Factor de potencia excesivo-nmero de fallos
Puerto de red Advertencia Puerto de red-advertencia
Fallo Puerto de red-fallo
Contador de fallos Puerto de red-nmero de fallos
Puerto de red-
configuracin
Fallo Puerto de red-fallo de configuracin
Contador de fallos Puerto de red-nmero de fallos de configuracin
Puerto de HMI Advertencia HMI-advertencia de puerto
Fallo HMI-fallo de puerto
Contador de fallos HMI-nmero de fallos de puerto
Nombre de datos Tipo de indicador o contador de fallos Nombre del parmetro
Uso
1639505 06/2009 541
Ext. fallo Fallo Fallo externo
Diagnstico de motor Advertencia Diagnstico-advertencia
Fallo Diagnstico-fallo
Contador de fallos Diagnstico-nmero de fallos
Diagnstico de
cableado
Fallo Cableado-fallo
Contador de fallos Cableado-nmero de fallos
Prueba Fallo Prueba-fallo
Controlador interno Advertencia Advertencia de temperatura interna del controlador
Fallo Controlador-fallo interno
Contador de fallos Controlador-nmero de fallos internos
Bloque de red interno Fallo Puerto de red-fallo interno
Contador de fallos Puerto de red-nmero de fallos internos
Enlace interno Advertencia Advertencia de puerto interno
Fallo Puerto interno-fallo
Contador de fallos Puerto interno-nmero de fallos
Nombre de datos Tipo de indicador o contador de fallos Nombre del parmetro
Uso
542 1639505 06/2009
Pgina Resea histrica de los fallos
Descripcin general
Cuerpo de la pgina Resea histrica de los fallos
En la lista Resea histrica de los fallos, seleccione un nmero de fallo o introduzca
0, 1, 2, 3 o 4 en el campo para visualizar el historial de los datos del controlador
LTM R registrados en el momento de los cinco ltimos fallos detectados. Fallo N0
contiene el registro de fallos ms reciente y Fallo N4 el registro de fallos ms antiguo
conservado.
El botn Borrar contadores, situado en la parte inferior de la pgina, se puede
utilizar para poner a cero todos los histricos, incluidos los 5 registros de fallos
(vase pgina 522)
Uso
1639505 06/2009 543
La pgina Resea histrica de los fallos contiene los siguientes parmetros de slo
lectura para Fallo N0:
La informacin del registro de fallos para los fallos del N1 al N4 sigue la misma lnea
que para el fallo N0. Consulte los parmetros N1-N4 correspondientes.
Nombre de grupo Nombre de datos Nombre del parmetro
Fecha y hora Fecha y hora-N0
Cdigo fallo Fallo-cdigo N0
Corriente FLCmax Corriente a plena carga-mx.
% FLC Motor-relacin de corriente a plena carga
Corriente media Corriente media-N0
Corriente L1 Corriente L1-N0
Corriente L2 Corriente L2-N0
Corriente L3 Corriente L3-N0
Corriente de tierra Corriente de tierra-N0
Corriente media-relacin Corriente media-relacin N0
Corriente L1-relacin Corriente L1-relacin N0
Corriente L2-relacin Corriente L2-relacin N0
Corriente L3-relacin Corriente L3-relacin N0
% corriente de tierra Corriente de tierra-relacin N0
Desequilibrio de fases corriente Corriente-desequilibrio de fases N0
Trmica Capacidad trmica Nivel de capacidad trmica-N0
Motor-sensor temp. Sensor de temperatura del motor en grados N0
Tensin Tensin media Tensin media-N0
Tensin L1L2 Tensin L1L2-N0
Tensin L2L3 Tensin L2L3-N0
Tensin L3L1 Tensin L3L1-N0
Tensin-desequilibrio de fases Tensin-N0 desequilibrio de fases
Frecuencia Frecuencia-N0
Potencia Potencia activa Potencia activa-N0
Factor de potencia Factor de potencia-N0
Uso
544 1639505 06/2009
Pgina Mantenimiento
Descripcin general
Acceso a la pgina Mantenimiento
La pgina Mantenimiento aparece al hacer clic en Mantenimiento en las cabeceras
de men en cualquier momento durante la navegacin y desde cualquier pgina
mostrada.
Submen de la pgina Mantenimiento
El submen de la pgina Mantenimiento permite acceder a la pgina Contador.
Uso
1639505 06/2009 545
Pgina Contador
Descripcin general
Uso
546 1639505 06/2009
Cuerpo de la pgina Contador
El botn Borrar contadores, situado en la parte inferior de la pgina, se puede
utilizar para poner a cero el tiempo de funcionamiento, los contadores de arranque
del motor y los histricos de otras pginas (vase pgina 522) El resto de
parmetros que se muestran en la pgina Contador no se ponen a cero.
La pgina Contador contiene los siguientes datos de slo lectura:
Nombre de grupo Nombre de datos Nombre del parmetro
Histricos de la unidad
de control
Temperatura mx. Controlador-temperatura interna mx.
Nmero de arranques L01 Motor-nmero de arranques L01
Nmero de arranques L02 Motor-nmero de arranques L02
Duracin del ltimo apagado Duracin del ltimo apagado del controlador
Histricos del motor Tiempo de funcionamiento Tiempo de funcionamiento
Nmero de arranques Motor-nmero de arranques
Arranques por hora Motor-nmero de arranques por hora
ltimo arranque Nivel Motor-corriente del ltimo arranque
Duracin Motor-duracin del ltimo arranque
Uso
1639505 06/2009 547
Pgina Configuracin
Descripcin general
Acceso a la pgina Configuracin
La pgina Configuracin aparece al hacer clic en Configuracin en las cabeceras
de men en cualquier momento durante la navegacin y desde cualquier pgina
mostrada.
Uso
548 1639505 06/2009
Submen de la pgina Configuracin
El submen de la pgina Configuracin permite acceder a las pginas siguientes:
Modificar valores en las pginas de ajustes
Para modificar valores de ajustes en las cuatro pginas del submen Producto,
debe haber introducido la contrasea vlida en la pgina Login (vase pgina 525)
De lo contrario, los valores de los parmetros permanecern atenuados.
Nivel 1 Nivel 2
Producto Trmica (vase pgina 549)
Corriente (vase pgina 551)
Tensin (vase pgina 554)
Potencia (vase pgina 557)
Seguridad Contrasea (vase pgina 559)
Uso
1639505 06/2009 549
Pgina Configuracin trmica del producto
Descripcin general
Uso
550 1639505 06/2009
Cuerpo de la pgina Configuracin trmica
En la lista Eleccin de la proteccin, seleccione el nombre del grupo de proteccin
que desee.
La modificacin de la configuracin slo se permite despus de la introduccin de
la contrasea correcta en la pgina Login (vase pgina 525).
La pgina Configuracin trmica contiene los siguientes datos editables:
Nombre de grupo Nombre de datos Nombre del parmetro
Sobrecarga trmica Activacin de fallo Sobrecarga trmica-activacin de fallo
Activacin de advertencia Sobrecarga trmica-activacin de advertencia
Motor-clase de disparo Motor-clase de disparo
FLC1 Motor-relacin de corriente a plena carga
FLC2 Motor-relacin de corriente a plena carga y alta velocidad
Hora D definitiva Sobrecarga trmica-tiempo sobrepasado definitivo de
fallo
Hora O definitiva Arranque prolongado-tiempo sobrepasado de fallo
Umbral de reinicio automtico
tras fallo
Sobrecarga trmica-umbral de reinicio tras fallo
Umbral de advertencia Sobrecarga trmica-umbral de advertencia
Temperatura del
motor
Activacin de fallo Motor-activacin de fallo de sensor de temperatura
Activacin de advertencia Motor-activacin de advertencia de sensor de
temperatura
Umbral de fallo PTC/NTC
(1)
Motor-umbral de fallo de sensor de temperatura
Umbral de fallo PT100
(2)
Sensor de temperatura del motor-umbral de fallo en
grados
Umbral de advertencia
PTC/NTC
(1)
Motor-umbral de advertencia de sensor de temperatura
Umbral de advertencia PT100
(2)
Sensor de temperatura del motor - umbral de advertencia
en grados
(1) Vlido si el valor del parmetro Motor-tipo de sensor de temperatura es PTC analgico o NTC analgico.
(2) Vlido si el valor del parmetro Motor-tipo de sensor de temperatura es PT100.
Uso
1639505 06/2009 551
Pgina Parmetros de corriente del producto
Descripcin general
Cuerpo de la pgina Parmetros de corriente
En la lista Eleccin de la proteccin, seleccione el nombre del grupo de proteccin
que desee.
La modificacin de la configuracin slo se permite despus de la introduccin de
la contrasea correcta en la pgina Login (vase pgina 525).
Uso
552 1639505 06/2009
La pgina Parmetros de corriente contiene los siguientes datos editables:
Nombre de grupo Nombre de datos Nombre del parmetro
Corriente de tierra Activacin de fallo Corriente de tierra-activacin de fallo
Activacin de advertencia Corriente de tierra-activacin de advertencia
Umbral de fallo interno Corriente de tierra interna-umbral de fallo
Tiempo sobrepasado de fallo
interno
Corriente de tierra interna-tiempo sobrepasado de fallo
Umbral de fallo externo Corriente de tierra externa-umbral de fallo
Tiempo sobrepasado de fallo
externo
Corriente de tierra externa-tiempo sobrepasado de
fallo
Umbral de advertencia
interna
Corriente de tierra interna-umbral de advertencia
Umbral de advertencia
externa
Corriente de tierra externa-umbral de advertencia
Desequilibrio de fases
corriente
Activacin de fallo Corriente-activacin de fallo de desequilibrio de fases
Activacin de advertencia Corriente-activacin de advertencia de desequilibrio
de fases
Umbral de fallo Corriente-umbral de fallo de desequilibrio de fases
Tiempo sobrepasado de fallo
en el arranque
Corriente-tiempo sobrepasado de fallo de desequilibrio
de fases en arranque
Tiempo sobrepasado de
fallos en marcha
Corriente-tiempo sobrepasado de fallo de desequilibrio
de fases en marcha
Umbral de advertencia Corriente-umbral de advertencia de desequilibrio de
fases
Prdida de fase corriente Activacin de fallo Corriente-activacin de fallo de prdida de fase
Activacin de advertencia Corriente-activacin de advertencia de prdida de fase
Tiempo sobrepasado de fallo Corriente-tiempo sobrepasado de prdida de fase
Inversin de fases corriente Activacin de fallo Corriente-activacin de fallo de inversin de fases
Arranque prolongado Activacin de fallo Arranque prolongado-activacin de fallo
Umbral de fallo Arranque prolongado-umbral de fallo
Tiempo sobrepasado de fallo Arranque prolongado-tiempo sobrepasado de fallo
Agarrotamiento Activacin de fallo Agarrotamiento-activacin de fallo
Activacin de advertencia Agarrotamiento-activacin de advertencia
Umbral de fallo Agarrotamiento-umbral de fallo
Tiempo sobrepasado de fallo Agarrotamiento - tiempo sobrepasado de fallo
Umbral de advertencia Agarrotamiento-umbral de advertencia
Uso
1639505 06/2009 553
Infracorriente Activacin de fallo Fallo de infracorriente-activacin
Activacin de advertencia Infracorriente-advertencia activacin
Umbral de fallo Fallo de infracorriente-umbral
Tiempo sobrepasado de fallo Infracorriente-tiempo sobrepasado de fallo
Umbral de advertencia Infracorriente-umbral de advertencia
Sobrecorriente Activacin de fallo Sobreintensidad-activacin de fallo
Activacin de advertencia Sobrecorriente-activacin de advertencia
Umbral de fallo Sobrecorriente-umbral de fallo
Tiempo sobrepasado de fallo Sobrecorriente-tiempo sobrepasado de fallo
Umbral de advertencia Sobrecorriente-umbral de advertencia
Nombre de grupo Nombre de datos Nombre del parmetro
Uso
554 1639505 06/2009
Pgina Parmetros de tensin del producto
Descripcin general
Cuerpo de la pgina Parmetros de tensin
En la lista Eleccin de la proteccin, seleccione el nombre del grupo de proteccin
que desee.
La modificacin de la configuracin slo se permite despus de la introduccin de
la contrasea correcta en la pgina Login (vase pgina 525)
Uso
1639505 06/2009 555
La pgina Parmetros de tensin contiene los siguientes datos editables:
Nombre de grupo Nombre de datos Nombre del parmetro
Tensin-desequilibrio de
fases
Activacin de fallo Tensin-activacin de fallo de desequilibrio de
fases
Activacin de advertencia Tensin-activacin de advertencia de
desequilibrio de fases
Umbral de fallo Tensin-umbral de fallo de desequilibrio de fases
Tiempo sobrepasado de fallo en el
arranque
Tensin-tiempo sobrepasado de fallo de
desequilibrio de fases en arranque
Tiempo sobrepasado de fallos en
marcha
Tensin-tiempo sobrepasado de fallo de
desequilibrio de fases en marcha
Umbral de advertencia Tensin-umbral de advertencia de desequilibrio
de fases
Tensin-prdida de fase Activacin de fallo Tensin-activacin de fallo de prdida de fase
Activacin de advertencia Tensin-activacin de advertencia de prdida de
fase
Tiempo sobrepasado de fallo Tensin-tiempo sobrepasado de fallo de prdida
de fase
Tensin-inversin de fase Activacin de fallo Tensin-activacin de fallo de inversin de fase
Infratensin Activacin de fallo Infratensin-activacin de fallo
Activacin de advertencia Infratensin-activacin de advertencia
Umbral de fallo Infratensin-umbral de fallo
Tiempo sobrepasado de fallo Infratensin-tiempo sobrepasado de fallo
Umbral de advertencia Infratensin-umbral de advertencia
Sobretensin Activacin de fallo Sobretensin-activacin de fallo
Activacin de advertencia Sobretensin-activacin de advertencia
Umbral de fallo Potencia excesiva-umbral de fallo
Tiempo sobrepasado de fallo Potencia excesiva-tiempo sobrepasado de fallo
Umbral de advertencia Potencia excesiva-umbral de advertencia
Uso
556 1639505 06/2009
Gestin de cadas de
tensin
Modo de cada de tensin Modo cada de tensin
Umbral de prdida de descarga Umbral de cada de tensin
Tiempo sobrepasado de prdida
de descarga
Descarga-tiempo sobrepasado
Umbral de rearranque por
descarga
Umbral de rearranque por cada de tensin
Tiempo sobrepasado de
rearranque por descarga
Tiempo sobrepasado de rearranque por cada de
tensin
Umbral de prdida de rearranque
automtico
Umbral de cada de tensin
Umbral de rearranque Umbral de rearranque por cada de tensin
Tiempo sobrepasado de
rearranque
Tiempo sobrepasado de rearranque por cada de
tensin
Tiempo sobrepasado de
rearranque inmediato
Tiempo sobrepasado de rearranque automtico
inmediato
Tiempo sobrepasado de
rearranque con retardo
Tiempo sobrepasado de rearranque automtico
con retardo
Nombre de grupo Nombre de datos Nombre del parmetro
Uso
1639505 06/2009 557
Pgina Parmetros de potencia del producto
Descripcin general
Cuerpo de la pgina Parmetros de potencia
En la lista Eleccin de la proteccin, seleccione el nombre del grupo de proteccin
que desee.
La modificacin de la configuracin slo se permite despus de la introduccin de
la contrasea correcta en la pgina Login (vase pgina 525)
Uso
558 1639505 06/2009
La pgina Parmetros de potencia contiene los siguientes datos editables:
Nombre de grupo Nombre de datos Nombre del parmetro
Falta de carga Activacin de fallo Potencia insuficiente-activacin de fallo
Activacin de
advertencia
Potencia insuficiente-activacin de advertencia
Umbral de fallo Potencia insuficiente-umbral de fallo
Umbral de advertencia Potencia insuficiente-umbral de advertencia
Tiempo sobrepasado de
fallo
Potencia insuficiente-tiempo sobrepasado de
fallo
Sobrecarga Activacin de fallo Potencia excesiva-activacin de fallo
Activacin de
advertencia
Potencia excesiva-activacin de advertencia
Umbral de fallo Potencia excesiva-umbral de fallo
Tiempo sobrepasado de
fallo
Potencia excesiva-tiempo sobrepasado de fallo
Umbral de advertencia Potencia excesiva-umbral de advertencia
Factor de potencia insuficiente Activacin de fallo Factor de potencia insuficiente-activacin de fallo
Activacin de
advertencia
Factor de potencia insuficiente-activacin de
advertencia
Umbral de fallo Factor de potencia insuficiente-umbral de fallo
Tiempo sobrepasado de
fallo
Factor de potencia insuficiente-tiempo
sobrepasado de fallo
Umbral de advertencia Factor de potencia insuficiente-umbral de
advertencia
Factor de potencia excesivo Activacin de fallo Factor de potencia excesivo-umbral de
advertencia
Activacin de
advertencia
Factor de potencia excesivo-activacin de
advertencia
Umbral de fallo Factor de potencia excesivo-umbral de fallo
Tiempo sobrepasado de
fallo
Factor de potencia excesivo-tiempo sobrepasado
de fallo
Umbral de advertencia Factor de potencia excesivo-umbral de
advertencia
Uso
1639505 06/2009 559
Pgina Contrasea
Descripcin general
Uso
560 1639505 06/2009
Pgina Contrasea
La pgina Contrasea permite cambiar la contrasea necesaria para modificar los
parmetros editables en algunas pginas web.
La contrasea debe ser un entero de 0001 a 9999.
El modo de modificacin est o no est protegido segn el valor de la contrasea
como se explica a continuacin.
NOTA: La contrasea de las pginas web es la misma que la del LTM CU. Si
cambia la contrasea del LTM CU, la contrasea de las pginas del servidor web
se establece en esta contrasea y viceversa.
Cambiar la contrasea
Siga el procedimiento siguiente para cambiar la contrasea:
La contrasea vuelve al valor predeterminado:
En el retorno a los ajustes de fbrica del producto.
Cuando se ha descargado un nuevo firmware en el producto.
Si la contrasea es... Entonces...
0000 (valor predeterminado) No se necesita ningn nombre de usuario ni ninguna contrasea para modificar
los parmetros editables en las pginas web.
Un entero de 0001 a 9999 El modo de modificacin est protegido por contrasea.
Debe introducir el nombre de usuario y la contrasea vlidos en la pgina Login
para poder modificar los parmetros editables.
Paso Accin
1 En la pgina Contrasea, introduzca el nombre de usuario (USER) y la contrasea actuales.
2 Introduzca la nueva contrasea dos veces (un entero de 0000 a 9999).
3 Confirme o cancele el cambio.
1639505 06/2009 561
8
Mantenimiento
1639505 06/2009
Mantenimiento
Descripcin general
En este captulo se describe el mantenimiento y las caractersticas de diagnstico
automtico del controlador LTM R y el mdulo de expansin.
Contenido de este captulo
Este captulo contiene los siguiente apartados:
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
La aplicacin de este producto requiere experiencia en el diseo y la
programacin de sistemas de control. Slo las personas que tengan experiencia
estn autorizadas a programar, instalar, modificar y aplicar este producto. Siga
todos los cdigos y normativas de seguridad locales y nacionales.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Deteccin de problemas 562
Solucin de problemas 564
Mantenimiento preventivo 567
Sustitucin de un controlador LTM R y un mdulo de expansin LTM E 571
Advertencias y fallos de comunicacin 572
Mantenimiento
562 1639505 06/2009
Deteccin de problemas
Descripcin general
El controlador LTM R y el mdulo de expansin realizan comprobaciones de
diagnstico automtico en el encendido y durante el funcionamiento.
Es posible detectar problemas con el controlador LTM R o el mdulo de expansin
mediante:
Los LED de encendido y alarma del controlador LTM R,
Los LED de encendido y entrada del mdulo de expansin,
La pantalla LCD en un dispositivo HMI XBTN410 de Magelis
o una unidad de
operador de control TeSys
T LTM CU conectada al puerto HMI del controlador
LTM R, o
El software PowerSuite que se ejecuta en un PC conectado al puerto HMI del
controlador LTM R.
LED de dispositivos
Los LED del controlador LTM R y el mdulo de expansin indican los siguientes
problemas:
Dispositivo HMI XBT de Magelis
El HMI XBTN410 de Magelis
muestra automticamente informacin acerca de un
fallo o una advertencia, incluidos los fallos y advertencias del diagnstico
automtico del controlador LTM R, cuando stos se producen.
Para obtener informacin acerca de la pantalla de fallos y advertencias cuando el
HMI se utiliza en una configuracin de 1 a varios, consulte Gestin de fallos (1 a
varios), pgina 369.
LED de LTM R LED de LTM E Problema
Power Alarm PLC Alarm Power
Apagado Rojo - - Fallo interno
Encendido Rojo - - Fallo de proteccin
Encendido Parpadeo rojo (2x por
segundo)
- - Advertencia de proteccin
Encendido Parpadeo rojo (5x por
segundo)
- - Descarga o ciclo rpido
Encendido - - Rojo Fallo interno
Mantenimiento
1639505 06/2009 563
Unidad de operador de control LTM CU
La unidad de operador de control TeSys
T LTM CU muestra automticamente
informacin acerca de un fallo o una advertencia.
Para obtener ms informacin, consulte Visualizacin de advertencias y fallos en el
manual de usuario de TeSys T LTM CU Unidad de operador de control.
PowerSuite
El software PowerSuite muestra una matriz visual de los fallos y advertencias
activos, incluidos los fallos y advertencias de diagnstico automtico del controlador
LTM R, cuando stos se producen.
Para obtener informacin acerca de esta pantalla de fallos y advertencias activos,
consulte Gestin de fallos, pgina 395.
Mantenimiento
564 1639505 06/2009
Solucin de problemas
Pruebas de diagnstico automtico
El controlador LTM R realiza pruebas de diagnstico automtico en la puesta en
marcha y durante el funcionamiento. Estas pruebas, los errores que detectan y los
pasos que se deben llevar a cabo en respuesta a un problema se describen a
continuacin:
Tipo Error Accin
Fallos
internos
graves
Fallo de temperatura
interna
Este fallo indica una advertencia a 80C, un fallo leve a 85C y un fallo
grave a 100C. Realice las acciones oportunas para reducir la
temperatura ambiente, por ejemplo:
aada un ventilador de refrigeracin auxiliar
vuelva a instalar el controlador LTM R y el mdulo de expansin de
forma que quede ms espacio libre alrededor.
Si el problema persiste:
1 Apague y vuelva a encender.
2 Aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
fallo de la CPU Estos fallos indican un error de hardware. Lleve a cabo los siguientes
pasos:
1 Apague y vuelva a encender.
2 Aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Error de checksum del
programa
error de prueba de RAM
Desbordamiento de pila
Escasez de pila
Tiempo de vigilancia
Fallos
internos
leves
Error de configuracin no
vlida
Indica un checksum errneo (error de checksum de config.) o un checksum
correcto pero con datos incorrectos (error de config. no vlida). Ambos
provocaron el error de hardware. Lleve a cabo los siguientes pasos:
1 Apague y vuelva a encender y aguarde 30 s.
2 Restaure los ajustes de configuracin a los predeterminados de
fbrica.
3 Si el fallo persiste, sustituya el controlador LTM R.
Error de checksum de
configuracin (EEROM)
Fallo interno de
comunicacin de red
Estos fallos indican un error de hardware. Lleve a cabo los siguientes
pasos:
1 Apague y vuelva a encender y aguarde 30 s.
2 Si el fallo persiste, sustituya el controlador LTM R.
error de A/D fuera de
servicio
Mantenimiento
1639505 06/2009 565
Errores de
diagnstico
Comprobacin de
comando de arranque
Compruebe lo siguiente:
salidas de rel
todo el cableado, por ejemplo:
circuito de cableado de control, incluidos todos los dispositivos
electromecnicos
circuito de cableado de alimentacin, incluidos todos los
componentes
cableado de TC de carga.
Una vez realizadas todas las comprobaciones:
1 Ponga a cero el fallo.
2 Si el fallo persiste, apague y vuelva a encender y aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Comprobacin del
comando de parada
Verificacin de parada
Verificacin del
funcionamiento del motor
Errores de
cableado/
configuracin
Error de inversin de TC Corrija la polaridad de los TC. Asegrese de que:
todos los TC externos miran en la misma direccin
todo el cableado de TC pasa por las ventanas en la misma direccin
Una vez realizada la comprobacin:
1 Ejecute un rearme tras fallo.
2 Si el fallo persiste, apague y vuelva a encender y aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Error de inversin de
corrientes/tensiones de
fase
Compruebe:
la conexin del cableado de L1, L2 y L3 para tener la seguridad de que
los cables no se cruzan
el parmetro Motor-secuencia de fases (ABC frente a ACB)
Una vez realizadas todas las comprobaciones:
1 Ejecute un rearme tras fallo.
2 Si el fallo persiste, apague y vuelva a encender y aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Error de configuracin de
fase
Error de conexin de PTC Busque:
cortocircuito o circuito abierto en el cableado del sensor de
temperatura del motor
tipo incorrecto de dispositivo sensor de temperatura del motor
configuracin incorrecta de parmetros del dispositivo seleccionado.
Una vez realizadas todas las comprobaciones:
1 Ejecute un rearme tras fallo.
2 Si el fallo persiste, apague y vuelva a encender y aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Tipo Error Accin
Mantenimiento
566 1639505 06/2009
Errores de
cableado/
configuracin
(continuacin)
Error de prdida de
tensin de fase
Busque:
cableado incorrecto, por ejemplo, terminaciones sueltas
fusible fundido
cable cortado
motor monofsico configurado para funcionamiento trifsico
motor monofsico sin cablear a travs de las ventanas del TC de carga
A y C
fallo del generador (por ejemplo, error de alimentacin de la red
pblica).
Una vez realizadas todas las comprobaciones:
1 Ejecute un rearme tras fallo.
2 Si el fallo persiste, apague y vuelva a encender y aguarde 30 s.
3 Si el fallo persiste, sustituya el controlador LTM R.
Tipo Error Accin
Mantenimiento
1639505 06/2009 567
Mantenimiento preventivo
Descripcin general
Las siguientes medidas de proteccin se deben realizar entre las principales
comprobaciones del sistema, como ayuda para mantener el sistema y protegerlo
contra errores de hardware o software irrecuperables:
Revise continuamente los histricos de funcionamiento.
Guarde los parmetros de configuracin del controlador LTM R en un archivo de
copia de seguridad.
Mantenga limpio el entorno de funcionamiento de controlador LTM R.
Realice peridicamente una comprobacin automtica del controlador LTM R.
Compruebe el reloj interno del controlador LTM R para garantizar su exactitud.
Histricos
El controlador LTM R recoge los siguientes tipos de informacin:
Datos en tiempo real de tensin, corriente, alimentacin, temperatura, E/S y
fallos.
Un recuento del nmero de fallos, por tipo, que se han producido desde el ltimo
encendido.
Un historial con la hora del estado del controlador LTM R, con medidas de
tensin, corriente, alimentacin y temperatura, en el momento de producirse
cada uno de los 5 fallos anteriores.
Utilice el software PowerSuite, un dispositivo HMI XBTN410 de Magelis
o una
unidad de operador de control TeSys
T LTM CU para tener acceso a estos
histricos y revisarlos. Analice esta informacin para determinar si el registro actual
de operaciones indica un problema.
Parmetros de configuracin
En caso de un error irrecuperable del controlador LTM R, puede restaurar
rpidamente los parmetros de configuracin si antes los ha guardado en un
archivo. La primera vez que se configura el controlador LTM R, y posteriormente
cada vez que se cambia algn parmetro de configuracin, utilice el software
PowerSuite para guardar los ajustes de los parmetros en un archivo.
Para guardar un archivo de configuracin:
Seleccione File Print To File.
Para restaurar el archivo de configuracin guardado:
1. Abra el archivo guardado. Seleccione File Open (a continuacin vaya hasta
el archivo).
2. Descargue la configuracin en el nuevo controlador.
3. Seleccione Link Transfer Device to PC.
Mantenimiento
568 1639505 06/2009
Entorno
Al igual que otros dispositivos electrnicos, el controlador LTM R recibe la influencia
de su entorno fsico. Para proporcionar un entorno saludable, lleve a cabo las
siguientes medidas preventivas de sentido comn, por ejemplo:
Programar exmenes peridicos del conjunto de bateras, fusibles, regletas de
alimentacin, bateras, supresores de sobretensiones y fuentes de alimentacin.
Mantener limpios el controlador LTM R, el panel y todos los dispositivos. Un flujo
de aire despejado impedir que se acumule el polvo, lo que podra conducir a
una condicin de cortocircuito.
Permanecer atento a la posibilidad de que otro equipo produzca radiacin
electromagntica. Asegrese de que no haya dispositivos que provoquen
interferencias electromagnticas con el controlador LTM R.
Mantenimiento
1639505 06/2009 569
Comprobacin automtica con el motor parado
Realice una comprobacin automtica mediante una de las siguientes formas:
Mantenga pulsado el botn Test/Reset de la parte frontal del controlador LTM R
entre 3 y 15 segundos como mximo
Configure el parmetro Comprobacin automtica-comando
Una comprobacin automtica slo puede realizarse si:
No existen fallos
El parmetro Comprobacin automtica-activacin est fijado (predeterminado)
Durante una comprobacin automtica, el controlador LTM R realiza las siguientes
comprobaciones:
Comprobacin de vigilancia
Comprobacin de RAM
Durante la secuencia de comprobacin automtica, el controlador LTM R calibra la
constante de tiempo de la memoria trmica, que realiza un seguimiento del tiempo
mientras no recibe alimentacin.
Si alguna de las pruebas anteriores falla, significa que se ha producido un fallo
interno leve. En caso contrario, la comprobacin automtica contina y el
controlador LTM R realiza las siguientes pruebas:
Prueba del mdulo de expansin LTM E (si se ha conectado a un mdulo de
expansin). Si esta prueba falla, el controlador LTM R experimenta un fallo
interno leve.
Prueba de comunicacin interna. Si esta prueba falla, el controlador LTM R
experimenta un fallo interno leve.
Prueba de LED: se apagan todos los LED, despus se enciende cada uno por
orden:
LED de actividad de comunicacin del HMI
LED de encendido
LED de recuperacin
LED de actividad de comunicacin del PLC
Al final de la comprobacin, todos los LED vuelven a su estado original.
Prueba de rel de salida: abre todos los rels y los restaura a su estado original
slo despus de ejecutar un comando de rearme, o cuando la alimentacin se
apaga y se vuelve a encender.
Si se mide la corriente durante la prueba automtica del rel, el controlador
LTM R experimenta un fallo interno leve.
Durante la prueba automtica del LTM R, aparece la cadena de texto "prueba
automtica" en el dispositivo HMI.
Durante una comprobacin automtica, el controlador LTM R establece el
parmetro Comprobacin automtica-comando en 1. Una vez que ha finalizado la
comprobacin automtica, este parmetro se restablece a 0.
Mantenimiento
570 1639505 06/2009
Comprobacin automtica con el motor encendido
Realice una comprobacin automtica mediante una de las siguientes formas:
El botn Test/Reset situado en la parte frontal del controlador LTM R
El comando Mens del HMI conectado al puerto RJ45
El software PowerSuite
El PLC
Cuando el motor est encendido, la ejecucin de una prueba automtica simula un
fallo trmico para poder comprobar si la salida lgica O.4 funciona correctamente.
Provoca un fallo de sobrecarga trmica
Durante una comprobacin automtica, el controlador LTM R establece el
parmetro Comprobacin automtica-comando en 1. Una vez que ha finalizado la
comprobacin automtica, este parmetro se restablece a 0.
Reloj interno
Para tener la seguridad de que los fallos se registran de forma exacta, compruebe
peridicamente el reloj interno del controlador LTM R. El controlador LTM R marca
la hora de todos los fallos mediante el valor almacenado en el parmetro Fecha y
hora-ajuste.
La precisin del reloj interno es de +/-1 segundo por hora. Si se aplica
continuamente alimentacin durante 1 ao, la precisin del reloj interno es de +/-30
minutos por ao.
Si se desactiva la alimentacin durante 30 minutos o menos, el controlador LTM R
conserva su configuracin del reloj interno, con una precisin de +/-2 minutos.
Si se desactiva la alimentacin durante ms de 30 minutos, el controlador LTM R
restablece su reloj interno a la hora en que se desactiv la alimentacin.
Mantenimiento
1639505 06/2009 571
Sustitucin de un controlador LTM R y un mdulo de expansin LTM E
Descripcin general
Las cuestiones que se deben plantear a la hora de sustituir un controlador LTM R o
un mdulo de expansin LTM E son:
El dispositivo sustituto es del mismo modelo que el original?
Se han guardado los parmetros de configuracin del controlador LTM R y
estn disponibles para transferirlos a su sustituto?
Asegrese de que el motor est apagado antes de proceder a la sustitucin del
controlador LTM R o del mdulo de expansin LTM E.
Sustitucin del controlador LTM R
El momento para planear la sustitucin de un controlador LTM R es:
Cuando se configuren inicialmente los parmetros del controlador LTM R
Cada vez que posteriormente se vuelva a configurar uno o varios de sus ajustes
NOTA: La forma ms fcil de reconfigurar un controlador LTM R de sustitucin es
utilizar el servicio de sustitucin de dispositivo defectuoso (FDR)
(vase pgina 411).
Si el servicio FDR no est disponible, tambin puede utilizar el software
PowerSuite para guardar todos los ajustes configurados del controlador LTM R
en un archivo, excepto la fecha y la hora. Una vez guardados, puede utilizar el
software PowerSuite para transferir esos parmetros al controlador LTM R original
o a su sustituto.
NOTA: Slo se guardan los parmetros configurados. Los datos histricos no se
guardan y, por lo tanto, no se pueden aplicar a un controlador LTM R sustituto.
Para obtener informacin acerca de cmo utilizar el software PowerSuite para
crear, guardar y transferir archivos de configuracin, consulte Gestin de archivos,
pgina 377.
Sustitucin del mdulo de expansin
Lo primero que hay que tener en cuenta a la hora de sustituir un mdulo de
expansin LTM E es sustituirlo por otro del mismo modelo, 24 V cc o 110-240 V ca,
que el original.
Deshacerse de dispositivos
Tanto el controlador LTM R como el mdulo de expansin LTM E contienen placas
electrnicas que, una vez acabada su vida til, requieren un tratamiento especial.
Cuando se deshaga de un dispositivo, asegrese de respetar las leyes, normativas
y practicas aplicables.
Mantenimiento
572 1639505 06/2009
Advertencias y fallos de comunicacin
Introduccin
Las advertencias y fallos de comunicacin se gestionan de una manera estndar,
igual que otros tipos de advertencias y fallos.
La presencia de un fallo se sealiza mediante distintos indicadores:
Estado de los LED, 3 de los cuales estn dedicados a la comunicacin
(vase pgina 309)
1 LED STS
2 LED LK/ACT, uno para cada conector de puerto de red
Estado de los rels de salida
Advertencia
Mensaje(s) visualizado(s) en la pantalla HMI
Presencia de un cdigo de excepcin (como un informe del PLC)
Prdida de comunicacin con el PLC
La prdida de la comunicacin se gestiona como cualquier otro fallo.
El controlador LTM R supervisa la comunicacin con el PLC. Mediante un tiempo
de inactividad de red ajustable (tiempo sobrepasado), la funcin de vigilancia del
controlador LTM R puede informar de una prdida de red (vigilancia de firmware).
En caso de una prdida de red, es posible configurar el controlador LTM R para que
lleve a cabo determinadas acciones. Estas dependen del canal de control en el que
estuviera funcionando el controlador LTM R antes de la prdida de red.
Si la comunicacin entre el PLC y el controlador LTM R se pierde mientras el
controlador LTM R se encuentra en el canal de control de red, el controlador LTM R
entra en estado de recuperacin. Si la comunicacin entre el PLC y el controlador
LTM R se pierde mientras el controlador LTM R se encuentra en el canal de control
local, y luego el canal de control cambia a control de red, el controlador LTM R entra
en estado de recuperacin.
Si la comunicacin entre el PLC y el controlador LTM R se restaura mientras el
canal de control est establecido en control de red, el controlador LTM R sale del
estado de recuperacin. Si el canal de control cambia a control local, el LTM R sale
del estado de recuperacin, sin importar cul sea el estado de la comunicacin
entre el PLC y el controlador.
En la siguiente tabla se definen las acciones disponibles que puede llevar a cabo el
controlador LTM R durante una prdida de comunicacin, y que el usuario puede
seleccionar al configurar el controlador LTM R.
Mantenimiento
1639505 06/2009 573
Acciones contra la prdida de comunicacin de red:
Prdida de comunicacin con el HMI
El controlador LTM R supervisa la comunicacin con un dispositivo HMI aprobado.
Mediante un tiempo de inactividad de red fijo (tiempo sobrepasado), la funcin de
vigilancia del controlador LTM R puede informar de una prdida de red. En caso de
una prdida de comunicacin, es posible configurar el controlador LTM R para que
lleve a cabo determinadas acciones. Estas dependen del canal de control en el que
estuviera funcionando el controlador LTM R antes de la prdida de comunicacin.
Si la comunicacin entre el HMI y el controlador se pierde mientras el controlador
LTM R se encuentra en el canal de control HMI, el controlador LTM R entra en
estado de recuperacin. Si la comunicacin entre el HMI y el controlador LTM R se
pierde mientras el controlador LTM R no se encuentra en el canal de control HMI, y
luego el canal de control cambia a control HMI, el controlador LTM R entra en
estado de recuperacin.
Si la comunicacin entre el HMI y el controlador se restaura mientras el canal de
control est establecido en control HMI, el LTM R sale del estado de recuperacin.
Si el canal de control cambia a Bornero de conexin o Control de red, el LTM R sale
del estado de recuperacin, sin importar cul sea el estado de la comunicacin
entre el HMI y el controlador.
En la siguiente tabla se definen las acciones que el controlador LTM R puede llevar
a cabo durante una prdida de comunicacin. Seleccione una de estas acciones al
configurar el controlador LTM R.
Canal de control de salida del
controlador LTM R antes de la prdida
de red
Acciones del LTM R disponibles tras una prdida de red entre el
PLC y el controlador LTM R
Bornero de conexin Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
HMI Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
Red Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
El comportamiento de los rels LO1 y LO2 depende del modo del
controlador del motor y de la estrategia de recuperacin elegida
Mantenimiento
574 1639505 06/2009
Acciones contra la prdida de comunicacin del HMI:
NOTA: Consulte el tema Condicin de recuperacin (vase pgina 63) para
obtener informacin sobre la prdida de comunicacin y la estrategia de
recuperacin.
Canal de control de salida del
controlador LTM R antes de la prdida
de red
Acciones del LTM R disponibles tras una prdida de red entre el HMI
y el controlador LTM R
Bornero de conexin Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
HMI Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
Red Posibilidades de control del fallo o advertencia:
No indicar nada
Activar una advertencia
Activar un fallo
Activar un fallo y una advertencia
El comportamiento de los rels LO1 y LO2 depende del modo del
controlador del motor y de la estrategia de recuperacin elegida
1639505 06/2009 575
1639505 06/2009
Apndices
Contenido de este anexo
Este anexo contiene los siguientes captulos:
Captulo Nombre del captulo Pgina
A Datos tcnicos 577
B Parmetros configurables 587
C Diagramas de cableado 607
576 1639505 06/2009
1639505 06/2009 577
A
Datos tcnicos
1639505 06/2009
Datos tcnicos
Descripcin general
En este apndice se describen los datos tcnicos relacionados con el controlador
LTM R y el mdulo de expansin LTM E.
Contenido de este captulo
Este captulo contiene los siguiente apartados:
Apartado Pgina
Especificaciones tcnicas del controlador LTM R 578
Especificaciones tcnicas del mdulo de expansin LTM E 582
Caractersticas de las funciones de medicin y supervisin 585
Datos tcnicos
578 1639505 06/2009
Especificaciones tcnicas del controlador LTM R
Especificaciones tcnicas
El controlador LTM R cumple las siguientes especificaciones:
Certificaciones
(1)
UL, CSA, CE, CTICK, CCC, NOM, GOST, IACS E10 (BV, LROS, DNV, GL, RINA, ABS,
RMRos), ATEX
Conformidad con los
estndares
IEC/EN 60947-4-1, UL 508, CSA C22.2 no.14, IACS E10
Directivas de la
Comunidad Europea
Certificacin CE, satisface los requisitos fundamentales de las directivas de compatibilidad
electromagntica (EMC) y de equipos de baja tensin (LV).
Tensin nominal de
aislacin (Ui)
Segn la norma IEC/EN 60947-1 Categora de
sobretensin III, grado de
polucin: 3
690 V
Segn la norma UL508, CSA C22-2 no. 14 690 V
Tensin nominal de
resistencia a choques
(Uimp)
Segn la norma IEC60947-1
8.3.3.4.1 prrafo 2
Potencia de 220 V,
circuitos de entrada y
salida
4,8 kV
Potencia de 24 V,
circuitos de entrada y
salida
0,91 kV
Circuitos de
comunicacin
0,91 kV
Circuitos PTC y de tierra 0,91 kV
Resistencia a
cortocircuitos
Segn la norma IEC60947-4-1 100 kA
Grado de proteccin Segn la norma 60947-1 (proteccin contra el contacto
directo)
IP20
Tratamiento de
proteccin
IEC/EN 60068 "TH"
IEC/EN 60068-2-30 Ciclos de humedad 12 ciclos
IEC/EN 60068-2-11 Roco salino 48 h
Temperatura
ambiente del aire
alrededor del
dispositivo
Almacenamiento -40+80 C (-40176 F)
Funcionamiento -20+60 C (-4140 F)
(1) Algunas certificaciones estn en curso.
(2) Sin modificar el estado de los contactos en la direccin menos favorable.
(3) NOTA: Este producto se ha diseado para su uso en entornos de clase A. El uso de este producto en entornos
de clase B podra provocar interferencias electromagnticas no deseadas, que podran exigir la implementacin de
medidas de remisin adecuadas.
Datos tcnicos
1639505 06/2009 579
Altitud mxima de
funcionamiento
Reduccin de potencia aceptada 4500 m (14,763 ft)
Sin reduccin de potencia 2000 m (6,561 ft)
Resistencia al fuego Segn la norma UL 94 V2
Segn la norma IEC 695-2-1 (Piezas que admiten
componentes activos)
960 C (1,760 F)
(Otros componentes) 650 C (1,202 F)
Pulso de choque
mecnico de medio
seno = 11 ms
Segn la norma CEI 60068-2-27
(2)
15 gn
Resistencia a las
vibraciones
Segn la norma CEI 60068-2-6
(2)
Montaje de panel 4 gn
Montaje en riel DIN 1 gn
Inmunidad a las
descargas
electrostticas
Segn la norma EN61000-4-2 Por aire 8 kV nivel 3
Sobre superficie 6 kV nivel 3
Inmunidad a los
campos radiados
Segn la norma EN61000-4-3 10 V/m nivel 3
Inmunidad contra
rfagas transitorias
rpidas
Segn la norma EN61000-4-4 En lneas de alimentacin
y salidas de rel
4 kV nivel 4
Todos los dems
circuitos
2 kV nivel 3
Inmunidad a los
campos
radioelctricos
Segn la norma EN610-4-6
(3)
10 V rms nivel 3
Inmunidad a
sobretensin
transitoria
Segn la norma IEC/EN 61000-4-
5
Modo comn Modo diferencial
Lneas de alimentacin y salidas
de rel
4 kV (12 /9 F) 2 kV (2 /18 F)
Entradas y alimentacin 24 V cc 1 kV (12 /9 F) 0,5 kV (2 /18 F)
Entradas y alimentacin 100-240
V ca
2 kV (12 /9 F) 1 kV (2 /18 F)
Comunicacin 2 kV (12 /18 F)
Sensor de temperatura (IT1/IT2) 1 kV (42 /0,5 F) 0,5 kV (42 /0,5 F)
(1) Algunas certificaciones estn en curso.
(2) Sin modificar el estado de los contactos en la direccin menos favorable.
(3) NOTA: Este producto se ha diseado para su uso en entornos de clase A. El uso de este producto en entornos
de clase B podra provocar interferencias electromagnticas no deseadas, que podran exigir la implementacin de
medidas de remisin adecuadas.
Datos tcnicos
580 1639505 06/2009
Caractersticas de tensin de control
El controlador LTM R presenta las siguientes caractersticas de tensin de control:
Caractersticas de las entradas lgicas
Caractersticas de las salidas lgicas
Tensin de control 24 V cc 100-240 V ca
Consumo de potencia Segn la norma IEC/EN 60947-1 56...127 mA 8...62,8 mA
Intervalo de tensin de control Segn la norma IEC/EN 60947-1 20,4...26,4 V cc 93,5...264 V ca
Proteccin contra sobrecorriente Fusible 24 V 0,5 A gG Fusible 100-240 V 0,5 A
gG
Resistencia a las microinterrupciones 3 ms 3 ms
Resistencia a las cadas de
tensin
Segn la norma IEC/EN 61000-4-11 70% de UC mn.
durante 500 ms
70% de UC mn.
durante 500 ms
Valores de entrada nominal Tensin 24 V cc 100-240 V ca
Corriente 7 mA 3,1 mA a 100 V ca
7,5 mA a 240 V ca
Valores lmite de
entrada
En estado 1 Tensin 15 V mximo 79 V < V < 264 V
Corriente 2 mA mn. a 15 mA mx. 2 mA mn. a 110 V ca a 3 mA
mn. a 220 V ca
En estado 0 Tensin 5 V mximo 0 V < V < 40 V
Corriente 15 mA mximo 15 mA mximo
Tiempo de respuesta Cambio a estado 1 15 ms 25 ms
Cambio a estado 0 5 ms 25 ms
Conformidad con IEC 1131-1 Tipo 1 Tipo 1
Tipo de entrada De resistencia Capacitivo
Tensin nominal de aislacin 300 V
Carga trmica nominal CA 250 V ca / 5 A
Carga trmica nominal CC 30 V cc / 5 A
Clase 15 CA 480 VA, 500.000 operaciones, Ie mx. = 2 A
Clase 13 CC 30 W, 500.000 operaciones, Ie mx. = 1,25 A
Proteccin de fusible asociada gG a 4 A
Velocidad mxima de funcionamiento 1.800 ciclos/h
Frecuencia mxima 2 Hz (2 ciclos/s)
Tiempo de respuesta al cierre < 10 ms
Tiempo de respuesta a la apertura < 10 ms
Clase de contacto B300
Datos tcnicos
1639505 06/2009 581
Reduccin de potencia segn altitud
En la siguiente tabla se proporcionan las reducciones de potencia que se aplican a
las resistencias dielctricas y a la temperatura mxima de funcionamiento de
acuerdo con la altitud.
Factores correctivos de la
altitud
2000 m
(6,561.68 ft)
3000 m
(9,842.52 ft)
3500 m
(11,482.94 ft)
4000 m
(13,123.36 ft)
4500 m
(14,763.78 ft)
Ui de resistencia dielctrica 1 0,93 0,87 0,8 0,7
Temperatura mx. de
funcionamiento
1 0,93 0,92 0,9 0,88
Datos tcnicos
582 1639505 06/2009
Especificaciones tcnicas del mdulo de expansin LTM E
Especificaciones tcnicas
El mdulo de expansin LTM E cumple las siguientes especificaciones:
Certificaciones
(1)
UL, CSA, CE, CTICK, CCC, NOM, GOST, IACS E10 (BV, LROS, DNV, GL, RINA, ABS,
RMRos), ATEX
Conformidad con los
estndares
IEC/EN 60947-4-1, UL 508 - CSA C22-2, IACSE10
Directivas de la
Comunidad Europea
Certificacin CE. Satisface los requisitos fundamentales de las directivas de compatibilidad
electromagntica (EMC) y de equipos de baja tensin (LV).
Tensin nominal de
aislacin (Ui)
Segn la norma IEC/EN 60947-1 Categora de
sobretensin III, grado de
polucin: 3
UI 690 V en entradas de
tensin
Segn la norma UL508, CSA C22-2 no. 14 UI 690 V en entradas de
tensin
Tensin nominal de
resistencia a choques
(Uimp)
Segn la norma IEC60947-1
8.3.3.4.1 prrafo 2
Circuitos de entrada de
220 V
4,8 kV
Circuitos de entrada de
24 V
0,91 kV
Circuitos de
comunicacin
0,91 kV
Circuitos de entrada de
tensin
7,3 kV
Grado de proteccin Segn la norma 60947-1 (proteccin contra el contacto
directo)
IP20
Tratamiento de
proteccin
IEC/EN 60068 "TH"
IEC/EN 60068-2-30 Ciclos de humedad 12 ciclos
IEC/EN 60068-2-11 Roco salino 48 h
(1) Algunas certificaciones estn en curso.
(2) La temperatura ambiente nominal mxima del mdulo de expansin LTM E depende de la separacin de la
instalacin con el controlador LTM R.
(3) Sin modificar el estado de los contactos en la direccin menos favorable.
(4) NOTA: Este producto se ha diseado para su uso en entornos de clase A. El uso de este producto en entornos
de clase B podra provocar interferencias electromagnticas no deseadas, que podran exigir la implementacin de
medidas de remisin adecuadas.
Datos tcnicos
1639505 06/2009 583
Temperatura
ambiente del aire
alrededor del
dispositivo
Almacenamiento -40+80 C (-40176 F)
Funcionamiento
(2)
>40 mm (1.57 inches) de
separacin
-20+60 C (-4140 F)
<40 mm (1.57 inches)
pero >9 mm (0.35 inches)
de separacin
-20+55 C (-4131 F)
<9 mm (0.35 inches) de
separacin
-20+45 C (-4113 F)
Altitud mxima de
funcionamiento
Reduccin de potencia aceptada 4500 m (14,763 ft)
Sin reduccin de potencia 2000 m (6,561 ft)
Resistencia al fuego Segn la norma UL 94 V2
Segn la norma IEC 695-2-1 (Piezas que admiten
componentes activos)
960 C (1,760 F)
(Otros componentes) 650 C (1,202 F)
Pulso de choque
mecnico de medio
seno = 11 ms
Segn la norma CEI 60068-2-27
(3)
30 g 3 ejes y 6 direcciones
Resistencia a las
vibraciones
Segn la norma CEI 60068-2-6
(3)
5 gn
Inmunidad a las
descargas
electrostticas
Segn la norma EN61000-4-2 Por aire 8 kV nivel 3
Sobre superficie 6 kV nivel 3
Inmunidad a los
campos radiados
Segn la norma EN61000-4-3 10 V/m nivel 3
Inmunidad contra
rfagas transitorias
rpidas
Segn la norma EN61000-4-4 Todos los circuitos 4 kV nivel 4
2 kV en todos los dems
circuitos
Inmunidad a los
campos
radioelctricos
Segn la norma EN61000-4-6
(4)
10 V rms nivel 3
Inmunidad a
sobretensin
transitoria
Segn la norma IEC/EN 61000-4-
5
Modo comn Modo diferencial
Entradas 100-240 V ca 4 kV (12 ) 2 kV (2 )
Entradas 24 V cc 1 kV (12 ) 0,5 kV (2 )
Comunicacin 1 kV (12 )
(1) Algunas certificaciones estn en curso.
(2) La temperatura ambiente nominal mxima del mdulo de expansin LTM E depende de la separacin de la
instalacin con el controlador LTM R.
(3) Sin modificar el estado de los contactos en la direccin menos favorable.
(4) NOTA: Este producto se ha diseado para su uso en entornos de clase A. El uso de este producto en entornos
de clase B podra provocar interferencias electromagnticas no deseadas, que podran exigir la implementacin de
medidas de remisin adecuadas.
Datos tcnicos
584 1639505 06/2009
Caractersticas de las entradas lgicas
Reduccin de potencia segn altitud
En la siguiente tabla se proporcionan las reducciones de potencia que se aplican a
las resistencias dielctricas y a la temperatura mxima de funcionamiento de
acuerdo con la altitud.
Tensin de control 24 V cc 115-230 V ca
Valores de entrada nominal Tensin 24 V cc 100-240 V ca
Corriente 7 mA 3,1 mA a 100 V ca
7,5 mA a 240 V ca
Valores lmite de
entrada
En estado 1 Tensin 15 V mximo 79 V < V < 264 V
Corriente 2 mA mn. a 15 mA mx. 2 mA mn. a 110 V ca a 3 mA
mn. a 220 V ca
En estado 0 Tensin 5 V mximo 0 V < V < 40 V
Corriente 15 mA mximo 15 mA mximo
Tiempo de respuesta Cambio a estado 1 15 ms (slo entrada) 25 ms (slo entrada)
Cambio a estado 0 5 ms (slo entrada) 25 ms (slo entrada)
Conformidad con IEC 1131-1 Tipo 1 Tipo 1
Tipo de entrada De resistencia Capacitivo
Factores correctivos de la
altitud
2000 m
(6,561.68 ft)
3000 m
(9,842.52 ft)
3500 m
(11,482.94 ft)
4000 m
(13,123.36 ft)
4500 m
(14,763.78 ft)
Ui de resistencia dielctrica 1 0,93 0,87 0,8 0,7
Temperatura mx. de
funcionamiento
1 0,93 0,92 0,9 0,88
Datos tcnicos
1639505 06/2009 585
Caractersticas de las funciones de medicin y supervisin
Medicin
Parmetro
Precisin
(1)
Valor guardado a
la prdida de
alimentacin
Corriente L1 (A)
Corriente L2 (A)
Corriente L3 (A)
Corriente L1-relacin (% FLC)
Corriente L2-relacin (% FLC)
Corriente L3-relacin (% FLC)
+/1% para modelos de 8 A y 27 A
+/2% para modelos de 100 A
No
Corriente de tierra-relacin (% FLCmn) Corriente de tierra interna:
+/10 a 20% para corrientes de tierra
superiores a:
0,1 A en modelos de 8 A
0,2 A en modelos de 27 A
0,3 A en modelos de 100 A
Corriente de tierra externa: superior a +/5% o
+/0,01 A
No
Corriente media (A)
Corriente media-relacin (% FLCmn)
+/1% para modelos de 8 A y 27 A
+/2% para modelos de 100 A
No
Corriente-desequilibrio de fases (%
desequilibrio)
+/1,5% para modelos de 8 A y 27 A
+/3% para modelos de 100 A
No
Nivel de capacidad trmica (% nivel
disparo)
+/1% No
Tiempo hasta el disparo (s) +/10% No
Mnimo-tiempo de espera (s) +/1% No
Motor-sensor de temperatura () +/2% No
Controlador-temperatura interna (C) +/4% No
Frecuencia (Hz) +/2% No
Tensin L1-L2 (V)
Tensin L2-L3 (V)
Tensin L3-L1 (V)
+/1% No
Tensin-desequilibrio de fases (%
desequilibrio)
+/1,5% No
Tensin media (V) +/1% No
Factor de potencia (cos ) +/3% No
(1) Nota: Los niveles de precisin que se muestran en esta tabla son niveles de precisin tpicos. Los niveles de
precisin reales pueden ser inferiores o superiores a estos valores.
Datos tcnicos
586 1639505 06/2009
Historial del motor
Potencia activa (kW) +/5% No
Potencia reactiva (kVAR) +/5% No
Potencia activa-consumo (kWh) +/5% No
Potencia reactiva-consumo (kVARh) +/5% No
Parmetro
Precisin
(1)
Valor guardado a
la prdida de
alimentacin
(1) Nota: Los niveles de precisin que se muestran en esta tabla son niveles de precisin tpicos. Los niveles de
precisin reales pueden ser inferiores o superiores a estos valores.
Parmetro Precisin Valor guardado a
la prdida de
alimentacin
Motor-nmero de arranques
Motor-nmero de arranques LO1
Motor-nmero de arranques LO2
+/1 S
Motor-nmero de arranques por hora +0/5 mn S
Descarga-nmero +/1 S
Motor-corriente del ltimo arranque (%
FLC)
+/1% para modelos de 8 A y 27 A
+/2% para modelos de 100 A
S
Motor-duracin del ltimo arranque (s) +/1% No
Tiempo de funcionamiento (s) S
Controlador-temperatura interna mx.
(C)
+/4 C S
1639505 06/2009 587
B
Parmetros configurables
1639505 06/2009
Parmetros configurables
Descripcin general
Los parmetros configurables para el controlador LTM R y el mdulo de expansin
LTM E se describen a continuacin. La secuencia de configuracin de los
parmetros depende de la herramienta de configuracin utilizada, ya sea un
dispositivo HMI o el software PowerSuite.
Los parmetros se agrupan de acuerdo con las fichas de configuracin de
PowerSuite. Para ayudarle a encontrar el enlace con las tablas de variables en el
captulo Acerca del uso, cada parmetro tienesu correspondiente nmero de
registro adjunto.
Contenido de este captulo
Este captulo contiene los siguiente apartados:
ADVERTENCIA
RIESGO DE FUNCIONAMIENTO Y CONFIGURACIN NO DESEADOS
Cuando modifique los parmetros de configuracin del controlador LTM R:
Tenga especial cuidado si cambia los ajustes de los parmetros cuando el
motor est en marcha.
Desactive el control de red del controlador LTM R para impedir una
configuracin de parmetros y un funcionamiento no deseados.
Si no se siguen estas instrucciones pueden producirse lesiones personales
graves o mortales o daos en el equipo.
Apartado Pgina
Configuracin de control y del motor 588
Configuracin trmica 591
Parmetros de corriente 593
Parmetros de tensin 596
Parmetros de potencia 599
Configuracin de comunicacin y HMI 601
Parmetros configurables
588 1639505 06/2009
Configuracin de control y del motor
Motor-modo de funcionamiento
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
Motor-tensin nominal 110690 V 400 V 565
Motor-secuencia de fases A-B-C
A-C-B
A-B-C 601,12
Motor-fases Motor trifsico
Motor monofsico
Motor trifsico 601,13
Motor-potencia nominal 0,1999,9 kW en
incrementos de 0,1 kW
7,5 kW 583
Motor-modo de funcionamiento Sobrecarga 2 hilos
Sobrecarga 3 hilos
Independiente 2 hilos
Independiente 3 hilos
2 sentidos de marcha 2
hilos
2 sentidos de marcha 3
hilos
Dos pasos 2 hilos
Dos pasos 3 hilos
Dos velocidades 2 hilos
Dos velocidades 3 hilos
Personalizado
Independiente 3 hilos 540
Control de transicin directa Activado/desactivado Desactivado 683,9
Motor-tiempo sobrepasado de transicin 0...999,9 s 1 s 541
Ciclo rpido-tiempo sobrepasado de
bloqueo
0...999,9 s en incrementos de
0,1 s
0 s 553
Motor-umbral de paso 1 a 2 20...800% FLC en
incrementos del 1%
150% 644
motor-tiempo sobrepasado de paso 1 a 2 0,1...999,9 s 5 s 643
Motor estrella-tringulo 0 = desactivado
1 = activado
0 601,11
Contactor-calibre 1...1.000 A en incrementos de
0,1 A
810 A 627
Parmetros configurables
1639505 06/2009 589
Modo de control
Modo de reinicio
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
Ajuste del canal de control a distancia 0=Red
1=Bornero de conexin
2=HMI
-
683,5
683,6
Control de ajuste de canal local Bornero de conexin
HMI
Bornero de conexin 683,8
Modo de transferencia de control Con sacudidas
Sin sacudidas
Con sacudidas 683,10
Detencin de la desactivacin del bornero
de conexin
Activado
Desactivado
Activado 683,11
Detencin de la desactivacin de HMI Activado
Desactivado
Activado 683,12
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
Fallo-modo de reinicio Manual
A distancia
Automtico
Manual 602,0-2
Reinicio automtico-ajuste intentos grupo 1 0=manual, 1, 2, 3, 4, 5=nmero
ilimitado de intentos de reinicio
5 637
Reinicio automtico-tiempo sobrepasado de
grupo 1
0...9.999 s en incrementos de 1 s 480 s 638
Reinicio automtico-ajuste intentos grupo 2 0=manual, 1, 2, 3, 4, 5=nmero
ilimitado de intentos de reinicio
0 639
Reinicio automtico-tiempo sobrepasado de
grupo 2
0...9.999 s en incrementos de 1 s 1.200 s 640
Reinicio automtico-ajuste intentos grupo 3 0=manual, 1, 2, 3, 4, 5=nmero
ilimitado de intentos de reinicio
0 641
Reinicio automtico-tiempo sobrepasado de
grupo 3
0...9.999 s en incrementos de 1 s 60 s 642
Parmetros configurables
590 1639505 06/2009
Transformador de corriente de carga
Transformador de corriente de tierra
Diagnstico
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
CT de carga-relacin Interno
10:1
15:1
30:1
50:1
100:1
200:1
400:1
800:1
Otra relacin
Interno 95 (solo lectura)
CT de carga-mltiples pasos 1...100 pasos en
incrementos de 1
1 630
CT de carga-primario
(slo acceso si CT de carga-relacin =
Otra relacin)
1...65.535 en incrementos de
1
1 628
CT de carga-secundario
(slo acceso si CT de carga-relacin =
Otra relacin)
1...500 en incrementos de 1 1 629
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
CT de tierra-primario
(slo acceso si Corriente de tierra-relacin
= Otra relacin)
165.535 en incrementos
de 1
1 560
CT de tierra-secundario
(slo acceso si Corriente de tierra-relacin
= Otra relacin)
165.535 en incrementos
de 1
1 561
Parmetro Intervalo de ajuste Ajuste de fbrica Registro / Bit
Diagnstico-activacin de advertencia Activado/Desactivado Activado 634,1
Diagnstico-activacin de fallo Activado/Desactivado Activado 633,1
Cableado-activacin de fallo Activado/Desactivado Activado 633,2
Parmetros configurables
1639505 06/2009 591
Configuracin trmica
Sobrecarga trmica
Parmetro Intervalo de ajuste Ajustes de fbrica Registro / Bit
Sobrecarga trmica - modo Definida
Trmica inversa
Trmica inversa 546,3-4
Motor-clase de disparo 5 - 30 en incrementos de 5 Ninguno 606
Refrigeracin por ventilador auxiliar del
motor
Activado/Desactivado Desactivado 601,15
Motor-relacin de corriente a plena carga
(FLC1)
5...100 % de FLCmx, en
incrementos del 1 %
5 % FLCmx 652
Motor-relacin de corriente a plena carga y
alta velocidad (FLC2)
5...100 % de FLCmx, en
incrementos del 1 %
5 % FLCmx 653
Sobrecarga trmica-activacin de fallo Activado/Desactivado Activado 631.3
Sobrecarga trmica - activacin de
advertencia
Activado/Desactivado Activado 632,3
Sobrecarga trmica-umbral de advertencia 10...100 % de la capacidad
trmica en incrementos del
1 %
85 % de capacidad
trmica
609
Sobrecarga trmica-umbral de rearme tras
fallo
35...95 % de capacidad
trmica
75 % de capacidad
trmica
608
Arranque prolongado-tiempo sobrepasado
de fallo
1...200 s en incrementos de
1 s
10 s 623
Sobrecarga trmica-tiempo sobrepasado
definitivo de fallo
1...300 s en incrementos de
1 s
10 s 547
Parmetros configurables
592 1639505 06/2009
Proteccin de la temperatura del motor
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Motor - tipo de sensor de temperatura Ninguno
PTC binario
PT100
PTC analgico
NTC analgico
Ninguno 546,0-2
Motor-activacin de fallo de sensor de
temperatura
Activado/Desactivado Desactivado 633,6
Motor-activacin de advertencia de sensor
de temperatura
Activado/Desactivado Desactivado 634,6
Motor-umbral de fallo de sensor de
temperatura
20...6.500 en
incrementos de 0,1
200 549
Motor-umbral de advertencia de sensor de
temperatura
20...6.500 en
incrementos de 0,1
200 550
Sensor de temperatura del motor-umbral
de fallo en grados
0...200 C en incrementos
de 1 C
0 551
Sensor de temperatura del motor-umbral
de fallo en grados
0...200 C en incrementos
de 1 C
0 552
Parmetros configurables
1639505 06/2009 593
Parmetros de corriente
Corriente de tierra-modo
Desequilibrio de corrientes de fase
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Corriente de tierra-activacin de fallo Activado/Desactivado Activado 631,2
Corriente de tierra-activacin de
advertencia
Activado/Desactivado Activado 632,2
Corriente de tierra interna-tiempo
sobrepasado de fallo
0,5...25 s en incrementos
de 0,1 s
1 s 610
Corriente de tierra interna-umbral de fallo 20...500 % de FLCmn, en
incrementos del 1 %
30 % de FLCmn 611
Corriente de tierra interna-umbral de
advertencia
20...500 % de FLCmn, en
incrementos del 1 %
30 % de FLCmn 612
Corriente de fuga a tierra externa-tiempo
sobrepasado de fallo
0,1...25 s en incrementos
de 0.01 s
0,5 s 562
Corriente de fuga a tierra externa-umbral
de fallo
0,01...20 A en incrementos
de 0,01 A
1 A 563
Corriente de fuga a tierra externa-umbral
de advertencia
0,01...20 A en incrementos
de 0,01 A
1 A 564
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Corriente-activacin de fallo de
desequilibrio de fases
Activado/Desactivado Activado 631,6
Corriente-tiempo sobrepasado de fallo en
el arranque de desequilibrio de fases
0,2...20 s en incrementos
de 0,1 s
0,7 s 613
Corriente-tiempo sobrepasado para fallo
de desequilibrio de fases en marcha
0,2...20 s en incrementos
de 0,1 s
5 s 614
Corriente-umbral de fallo de desequilibrio
de fases
10...70 % del desequilibrio
calculado en incrementos
del 1 %
10 % 615
Corriente-activacin de advertencia de
desequilibrio de fases
Activado/Desactivado Desactivado 632,6
Corriente-umbral de advertencia de
desequilibrio de fases
10...70 % del desequilibrio
calculado en incrementos
del 1 %
10 % 616
Parmetros configurables
594 1639505 06/2009
Prdida de corriente de fase
Inversin de corrientes de fase
Arranque prolongado
Bloqueo
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Corriente-activacin de fallo de prdida de
fase
Activado/Desactivado Activado 633,4
Corriente-tiempo sobrepasado de fallo de
prdida de fase
0.1...30 s en incrementos
de 0,1 s
3 s 555
Corriente-activacin de advertencia de
prdida de fase
Activado/Desactivado Activado 634,4
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Corriente-activacin de fallo de inversin
de fases
Activado/Desactivado Desactivado 633,5
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Arranque prolongado-activacin de fallo Activado/Desactivado Activado 631,4
Arranque prolongado-tiempo sobrepasado
de fallo
1...200 s en incrementos
de 1 s
10 s 623
Arranque prolongado-umbral de fallo 100...800 % de FLC, en
incrementos del 10 %
100 % de FLC 624
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Agarrotamiento-activacin de fallo Activado/Desactivado Activado 631,5
Bloqueo-tiempo sobrepasado de fallo 1...30 s en incrementos de
1 s
5 s 617
Bloqueo-umbral de fallo 100...800 % de FLC, en
incrementos del 1 %
200 % de FLC 618
Agarrotamiento-activacin de advertencia Activado/Desactivado Desactivado 632,5
Bloqueo-umbral de advertencia 100...800 % de FLC, en
incrementos del 1 %
200 % de FLC 619
Parmetros configurables
1639505 06/2009 595
Infracorriente
Sobrecorriente
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Fallo de infracorriente-activacin Activado/Desactivado Desactivado 631,7
Infracorriente-tiempo sobrepasado de fallo 1...200 s en incrementos
de 1 s
10 s 620
Infracorriente-umbral de fallo 30..0,100 % de FLC, en
incrementos del 1 %
50 % de FLC 621
Infracorriente-advertencia activacin Activado/Desactivado Desactivado 632,7
Infracorriente-umbral de advertencia 30..0,100 % de FLC, en
incrementos del 1 %
50 % de FLC 622
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Sobreintensidad-activacin de fallo Activado/Desactivado Desactivado 633,3
Sobrecorriente-tiempo sobrepasado de
fallo
1...250 s en incrementos
de 1 s
10 s 556
Sobrecorriente-umbral de fallo 20...800 % de FLC, en
incrementos del 1 %
80 % de FLC 557
Sobrecorriente-activacin de advertencia Activado/Desactivado Desactivado 634,3
Sobrecorriente-umbral de advertencia 20...800 % de FLC, en
incrementos del 1 %
80 % de FLC 558
Parmetros configurables
596 1639505 06/2009
Parmetros de tensin
Desequilibrio de tensiones de fase
Prdida de tensin de fase
Inversin de tensin de fase
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Tensin-activacin de fallo de
desequilibrio de fases
Activado/Desactivado Desactivado 633,7
Tensin-tiempo sobrepasado de fallo en el
arranque de desequilibrio de fases
0,2...20 s en incrementos
de 0,1 s
0,7 s 566
Tensin-tiempo sobrepasado para fallo de
desequilibrio de fases en marcha
0,2...20 s en incrementos
de 0,1 s
2 s 567
Tensin-umbral de fallo de desequilibrio de
fases
3...15 % del desequilibrio
calculado en incrementos
del 1 %
10 % desequilibrio 568
Tensin-activacin de advertencia de
desequilibrio de fases
Activado/Desactivado Desactivado 634,7
Tensin-umbral de advertencia de
desequilibrio de fases
3...15 % desequilibrio
calculado en incrementos
del 1 %
10 % desequilibrio 569
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Tensin-activacin de fallo de prdida de
fase
Activado/Desactivado Activado 633,8
Tensin-tiempo sobrepasado de fallo de
prdida de fase
0,1...30 s en incrementos
de 0,1 s
3 s 576
Tensin-activacin de advertencia de
prdida de fase
Activado/Desactivado Activado 634,8
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Tensin-activacin de fallo de inversin de
fase
Activado/Desactivado Activado 633,9
Parmetros configurables
1639505 06/2009 597
Infratensin
Sobretensin
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Infratensin-activacin de fallo Activado/Desactivado Desactivado 633,10
Infratensin-tiempo sobrepasado de fallo 0,2...25 s en incrementos
de 0,1 s
3 s 573
Infratensin-umbral de fallo 70... 99 % de la tensin
nominal del motor en
incrementos del 1 %
85 % de tensin
nominal del motor
574
Infratensin-activacin de advertencia Activado/Desactivado Desactivado 634,10
Infratensin-umbral de advertencia 70... 99 % de la tensin
nominal del motor en
incrementos del 1 %
85 % de tensin
nominal del motor
575
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Sobretensin-activacin de fallo Activado/Desactivado Desactivado 633,11
Sobretensin-tiempo sobrepasado de fallo 0,2...25 s en incrementos
de 0,1 s
3 s 570
Sobretensin-umbral de fallo 101...115 % de la tensin
nominal del motor en
incrementos del 1 %
110 % de tensin
nominal del motor
571
Sobretensin-activacin de advertencia Activado/Desactivado Desactivado 634,11
Sobretensin-umbral de advertencia 101...115 % de la tensin
nominal del motor en
incrementos del 1 %
110 % de tensin
nominal del motor
572
Parmetros configurables
598 1639505 06/2009
Gestin de cadas de tensin
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Modo cada de tensin Ninguno
Descarga
Rearranque automtico
Ninguno 577,0-1
Umbral de cada de tensin 50...115 % de la tensin
nominal del motor en
incrementos del 1 %
65 % 579
Deslastrado-tiempo sobrepasado 1...9,999 s en incrementos
de 1 s
10 s 578
Tiempo sobrepasado de rearranque por
cada de tensin
0...9.999 s en incrementos
de 1 s
2 s 580
Umbral de cada de tensin para
rearranque
65...115 % de la tensin
nominal del motor en
incrementos del 1 %
90 % 581
tiempo sobrepasado de rearranque
automtico inmediato
0...4 s en incrementos de
0,1 s
2 582
tiempo sobrepasado de rearranque
automtico con retardo
0...301 s en incrementos
de 1 s
4 596
Parmetros configurables
1639505 06/2009 599
Parmetros de potencia
BajoPoten.
Potencia excesiva
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Potencia insuficiente-activacin de fallo Activado/Desactivado Desactivado 633,12
Potencia insuficiente-tiempo sobrepasado
de fallo
1...100 s en incrementos
de 1 s
60 s 587
Potencia insuficiente-umbral de fallo 20...800 % de potencia
nominal del motor en
incrementos del 1 %
20 % de potencia
nominal del motor
588
Potencia insuficiente-activacin de
advertencia
Activado/Desactivado Desactivado 634,12
Potencia insuficiente-umbral de
advertencia
20...800 % de potencia
nominal del motor en
incrementos del 1 %
20 % de potencia
nominal del motor
589
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Potencia excesiva-activacin de fallo Activado/Desactivado Desactivado 633,13
Potencia excesiva-tiempo sobrepasado de
fallo
1...100 s en incrementos
de 1 s
60 s 584
Potencia excesiva-umbral de fallo 20...800 % de potencia
nominal del motor en
incrementos del 1 %
150 % de potencia
nominal del motor
585
Potencia excesiva-activacin de
advertencia
Activado/Desactivado Desactivado 634,13
Potencia excesiva-umbral de advertencia 20...800 % de potencia
nominal del motor en
incrementos del 1 %
150 % de potencia
nominal del motor
586
Parmetros configurables
600 1639505 06/2009
Factor de potencia insuficiente
Factor de potencia excesivo
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Factor de potencia insuficiente-activacin
de fallo
Activado/Desactivado Desactivado 633,14
Factor de potencia insuficiente-tiempo
sobrepasado de fallo
1...25 s en incrementos de
0,1 s
10 s 590
Factor de potencia insuficiente-umbral de
fallo
0...1 en incrementos de
0,01
0,60 591
Factor de potencia insuficiente-activacin
de advertencia
Activado/Desactivado Desactivado 634,14
Factor de potencia insuficiente-umbral de
advertencia
0...1 en incrementos de
0,01
0,60 592
Parmetros Intervalo de ajuste Ajustes de fbrica Registro / Bit
Factor de potencia excesivo-activacin de
fallo
Activado/Desactivado Desactivado 633,15
Factor de potencia excesivo-tiempo
sobrepasado de fallo
1...25 s en incrementos de
0,1 s
10 s 593
Factor de potencia excesivo-umbral de fallo 0...1 en incrementos de
0,01
0,90 594
Factor de potencia excesivo-activacin de
advertencia
Activado/Desactivado Desactivado 634,15
Factor de potencia excesivo-umbral de
advertencia
0...1 en incrementos de
0,01
0,90 595
Parmetros configurables
1639505 06/2009 601
Configuracin de comunicacin y HMI
Red
NOTA: Todos los ajustes del puerto de red pueden configurarse a travs de
comandos de escritura de PLC.
El software PowerSuite puede configurar todos los ajustes del puerto de red,
excepto los ajustes de activacin de desviacin SNMP siguientes: desviacin en
caliente, desviacin en fro, enlace ascendente y enlace descendente.
Otros dispositivos HMI pueden configurar todos los ajustes del puerto de red,
excepto los ajustes relacionados con SNMP.
Parmetro Intervalo de ajuste Ajuste de fbrica Registro/Bit
Ajuste de direccin IP Ethernet 0.0.0.0... 255.255.255.255 0.0.0.0 3000-3001
Ajuste de mscara de subred Ethernet 0.0.0.0... 255.255.255.255 0.0.0.0 3002-3003
Ajuste de direccin de pasarela Ethernet 0.0.0.0... 255.255.255.255 0.0.0.0 3004-3005
Ajuste del tipo de trama del puerto de red 0 = Ethernet II
1 = 802.3
0 690.0-1
Desactivacin FDR del puerto de red Activado/Desactivado Desactivado 690.2
Activacin de la copia de seguridad
automtica FDR del puerto de red
0 = sin copia de
seguridad automtica
1 = copia de seguridad
automtica en el LTM R
0 690.3
Ajuste de la periodicidad de la copia de
seguridad automtica FDR del puerto de
red
1... 65535 s en incrementos
de 10 s
200 697
Configuracin mediante puerto de red-
activacin
Activado/Desactivado Activado 601.10
Puerto de red-ajuste de recuperacin En espera
Marcha
LO1, LO2 desactivados
LO1, LO2 activados
LO1 desactivado
LO2 desactivado
LO1, LO2
desactivados
682
Puerto de red-activacin de fallo Activado/Desactivado Desactivado 631.15
Puerto de red-tiempo sobrepasado de
prdida de comunicaciones
0,01 s99 s
en incrementos de 0,01 s
2 s 693
Puerto de red-activacin de advertencia Activado/Desactivado Desactivado 632.15
Parmetros configurables
602 1639505 06/2009
Puerto de red-ajuste endian 0 = la palabra menos
significativa primero
(little endian)
1 = la palabra ms
significativa primero (big
endian)
1 602.10
Ajuste de direccin 1 de administrador
SNMP Ethernet
0.0.0.0... 255.255.255.255 0.0.0.0 3012-3013
Ajuste de direccin 2 de administrador
SNMP Ethernet
0.0.0.0... 255.255.255.255 0.0.0.0 3014-3015
Ajuste de ubicacin del sistema SNMP
Ethernet
(texto libre) 3032-3047
Ajuste de contacto del sistema SNMP
Ethernet
(texto libre) 3048-3063
Ajuste de obtencin de nombre de
comunidad SNMP Ethernet
(texto libre) kpublic 3064-3071
Ajuste de nombre de comunidad SNMP
Ethernet
(texto libre) kpublic 3072-3079
Ajuste de desviacin del nombre de
comunidad SNMP Ethernet
(texto libre) kpublic 3080-3087
Activacin del arranque en fro de la
desviacin SNMP del puerto de red
Activado/Desactivado Activado 691.0
Activacin del arranque en caliente de la
desviacin SNMP del puerto de red
Activado/Desactivado Activado 691.1
Activacin del enlace descendente de la
desviacin de SNMP del puerto de red
Activado/Desactivado Activado 691.2
Activacin del enlace ascendente de la
desviacin SNMP del puerto de red
Activado/Desactivado Activado 691.3
Activacin del error de autentificacin de la
desviacin SNMP del puerto de red
Activado/Desactivado Activado 691.4
Parmetro Intervalo de ajuste Ajuste de fbrica Registro/Bit
Parmetros configurables
1639505 06/2009 603
HMI
Parmetro Intervalo de ajuste Ajuste de fbrica Registro/Bit
HMI-ajuste de direccin de puerto 1...247 1 603
HMI-ajuste de velocidad de transmisin en
baudios del puerto
19.200
9600
4800
1200
19.200 604
HMI-ajuste de paridad de puerto Par/Ninguno Par 602.3
Configuracin mediante herramienta HMI-
activacin
Activado/Desactivado Activado 601.9
Configuracin mediante teclado de HMI-
activacin
Activado/Desactivado Activado 601.8
HMI-ajuste de recuperacin de puerto En espera
Marcha
LO1, LO2 desactivados
LO1, LO2 activados
LO1 desactivado
LO2 desactivado
LO1, LO2
desactivados
645
HMI-activacin de fallo de puerto Activado/Desactivado Desactivado 631.10
HMI-activacin de advertencia de puerto Activado/Desactivado Desactivado 632.10
HMI-contrasea de teclado 0000...9.999 0000 (no protegido) 600
HMI-ajuste endian de puerto 0 = Little endian
1 = Big endian
1 602.9
Parmetros configurables
604 1639505 06/2009
Visualizacin
Parmetro Intervalo de ajuste Ajuste de fbrica Registro/Bit
HMI-ajuste de idioma English
Franais
Espaol
Deutsch
Italiano
English 650.0-4
HMI-visualizacin de ajuste de contraste 0...255 127 626.0-7
HMI-ajuste de brillo de visualizacin 0...255 127 626.8-15
Ajuste de fecha y hora Segundo: 059 0 655...658
Minuto: 059 0
Hora: 023 0
Da: 131 1
Mes:
Enero
Febrero
Marzo
Abril
Mayo
Junio
Julio
Agosto
Septiembre
Octubre
Noviembre
Diciembre
Enero
Ao: 20062099 2006
HMI - color de LED de estado del motor 0 = rojo
1 = verde
0 602.11
Temperatura y sobrecarga
HMI-activacin de visualizacin de nivel de capacidad
trmica
Activado/Desactivado Activado 651.1
HMI-activacin de visualizacin de capacidad trmica
restante
Activado/Desactivado Activado 654.11
HMI-activacin de visualizacin de tiempo hasta el
disparo
Activado/Desactivado Activado 654.12
HMI-activacin de visualizacin del modo de control Activado/Desactivado Activado 651.13
HMI-activacin de sensor de temperatura del motor Activado/Desactivado Activado 651.15
Corriente
HMI-activacin de visualizacin de corriente media Activado/Desactivado Activado 651.0
HMI-activacin de visualizacin de corriente L1 Activado/Desactivado Activado 651.2
Parmetros configurables
1639505 06/2009 605
HMI-activacin de visualizacin de corriente L2 Activado/Desactivado Activado 651.3
HMI-activacin de visualizacin de corriente L3 Activado/Desactivado Activado 651.4
HMI-activacin de visualizacin de relacin de
corriente L1
Activado/Desactivado Activado 654.8
HMI-activacin de visualizacin de relacin de
corriente L2
Activado/Desactivado Activado 654.9
HMI-activacin de visualizacin de relacin de
corriente L3
Activado/Desactivado Activado 654.10
HMI-activacin de visualizacin de relacin de
corriente media
Activado/Desactivado Activado 654.7
HMI-activacin de visualizacin de desequilibrio de
fases de corriente
Activado/Desactivado Activado 651.7
HMI-activacin de visualizacin de histricos de inicio Activado/Desactivado Activado 651.14
HMI-activacin de visualizacin de corriente de tierra Activado/Desactivado Activado 654.5
Tensin
HMI-activacin de visualizacin de tensin media Activado/Desactivado Activado 654.3
HMI-activacin de visualizacin de tensin L1-L2 Activado/Desactivado Activado 654.0
HMI-activacin de visualizacin de tensin L2-L3 Activado/Desactivado Activado 654.1
HMI-activacin de visualizacin de tensin L3-L1 Activado/Desactivado Activado 654.2
HMI-activacin de visualizacin de desequilibrio de
fases de tensin
Activado/Desactivado Activado 654.13
Estado
HMI-activacin de visualizacin de fecha Activado/Desactivado Activado 654.14
HMI-activacin de visualizacin de tiempo Activado/Desactivado Activado 654.15
HMI-activacin de visualizacin del tiempo de
funcionamiento
Activado/Desactivado Activado 651.8
HMI-activacin de visualizacin de frecuencia Activado/Desactivado Activado 651.11
HMI-activacin de visualizacin de arranques por hora Activado/Desactivado Activado 651.12
HMI-activacin de visualizacin de estado del motor Activado/Desactivado Activado 651.6
HMI-activacin de visualizacin de estado E/S Activado/Desactivado Activado 651.9
Potencia
HMI-activacin de factor de potencia Activado/Desactivado Activado 654.6
HMI-activacin de visualizacin de potencia Activado/Desactivado Activado 654.4
HMI-activacin de visualizacin de potencia reactiva Activado/Desactivado Activado 651.10
HMI-activacin de visualizacin de consumo Activado/Desactivado Activado 654.5
Parmetro Intervalo de ajuste Ajuste de fbrica Registro/Bit
Parmetros configurables
606 1639505 06/2009
1639505 06/2009 607
C
Diagramas de cableado
1639505 06/2009
Diagramas de cableado
Descripcin general
Los diagramas de cableado del modo de funcionamiento LTM R se pueden dibujar
de acuerdo con el estndar IEC o el estndar NEMA.
Contenido de este captulo
Este captulo contiene las siguientes secciones:
Seccin Apartado Pgina
C.1 Diagramas de cableado con formato IEC 608
C.2 Diagramas de cableado con formato NEMA 628
Diagramas de cableado
608 1639505 06/2009
C.1 Diagramas de cableado con formato IEC
Descripcin general
En esta seccin se incluyen los diagramas de cableado correspondientes a los 5
modos de funcionamiento preconfigurados:
Se describe individualmente cada aplicacin con:
Sobrecarga Supervisin de la carga del motor cuando el control
de la carga del motor (arranque/parada) se realiza a
travs de un mecanismo distinto al controlador.
Independiente Aplicaciones de arranque del motor a plena tensin
en la lnea con un sentido de marcha
2 sentidos de marcha Aplicaciones de arranque del motor a plena tensin
en la lnea con 2 sentidos de marcha
Dos tiempos Aplicaciones de arranque del motor de tensin
reducida:
Estrella-tringulo
Resistencia principal de transicin abierta
Autotransformador de transicin abierta
Dos velocidades Aplicaciones de motor de dos velocidades, por
ejemplo:
Dahlander (polo consecuente)
Inversor de polaridad
1 diagrama completo de la aplicacin
(incluidos la potencia y el control)
Control de bornero de conexin de 3 hilos (impulso)
3 diagramas parciales
(variantes de cableado de entrada
lgica de control)
Control de bornero de conexin de 2 hilos
(mantenido)
Control de bornero de conexin de 3 hilos (impulso)
con control de red seleccionable
Control de bornero de conexin de 2 hilos
(mantenido) con control de red seleccionable
Diagramas de cableado
1639505 06/2009 609
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Diagramas de cableado del modo de sobrecarga 610
Diagramas de cableado del modo independiente 614
Diagramas de cableado del modo de 2 sentidos de marcha 616
Diagramas de cableado del modo estrella-tringulo de dos tiempos 618
Diagramas de cableado del modo de resistencia principal de dos pasos 620
Diagramas de cableado del modo de autotransformador de dos tiempos 622
Diagramas de cableado del modo Dahlander de dos velocidades 624
Diagramas de cableado del modo de cambio de polarizacin de dos
velocidades
626
Diagramas de cableado
610 1639505 06/2009
Diagramas de cableado del modo de sobrecarga
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 611
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagramas de cableado
612 1639505 06/2009
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagramas de cableado
1639505 06/2009 613
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
614 1639505 06/2009
Diagramas de cableado del modo independiente
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 615
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
616 1639505 06/2009
Diagramas de cableado del modo de 2 sentidos de marcha
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
1 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el
controlador enclava de forma electrnica O.1 y O.2.
Diagramas de cableado
1639505 06/2009 617
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
618 1639505 06/2009
Diagramas de cableado del modo estrella-tringulo de dos tiempos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
1 Los contactos de enclavamiento de CN KM1 y KM3 no son obligatorios porque el
controlador enclava de forma electrnica O.1 y O.2.
Diagramas de cableado
1639505 06/2009 619
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
620 1639505 06/2009
Diagramas de cableado del modo de resistencia principal de dos pasos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 621
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
622 1639505 06/2009
Diagramas de cableado del modo de autotransformador de dos tiempos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
1 Los contactos de enclavamiento de CN KM1 y KM3 no son obligatorios porque el
controlador enclava de forma electrnica O.1 y O.2.
Diagramas de cableado
1639505 06/2009 623
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
624 1639505 06/2009
Diagramas de cableado del modo Dahlander de dos velocidades
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
1 Una aplicacin Dahlander requiere que dos juegos de cables pasen por las ventanas de
CT. El controlador tambin se puede colocar aguas arriba de los contactores. En este
caso, si el motor Dahlander se utiliza en modo de par variable, todos los cables aguas
abajo de los contactores deben ser del mismo tamao.
2 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el
controlador enclava de forma electrnica O.1 y O.2.
Diagramas de cableado
1639505 06/2009 625
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
626 1639505 06/2009
Diagramas de cableado del modo de cambio de polarizacin de dos velocidades
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
1 Una aplicacin de cambio de polarizacin requiere que 2 juegos de cables pasen por las
ventanas de CT. El controlador tambin se puede colocar aguas arriba de los contactores.
En este caso, todos los cables aguas abajo de los contactores deben ser del mismo
tamao.
2 Los contactos de enclavamiento de CN KM1 y KM2 no son obligatorios porque el firmware
del controlador enclava O.1 y O.2.
Diagramas de cableado
1639505 06/2009 627
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
628 1639505 06/2009
C.2 Diagramas de cableado con formato NEMA
Descripcin general
En esta seccin se incluyen los diagramas de cableado correspondientes a los 5
modos de funcionamiento preconfigurados:
Se describe individualmente cada aplicacin con:
Sobrecarga Supervisin de la carga del motor cuando el control
de la carga del motor (arranque/parada) se realiza a
travs de un mecanismo distinto al controlador.
Independiente Aplicaciones de arranque del motor a plena tensin
en la lnea con un sentido de marcha
2 sentidos de marcha Aplicaciones de arranque del motor a plena tensin
en la lnea con 2 sentidos de marcha
Dos tiempos Aplicaciones de arranque del motor de tensin
reducida:
Estrella-tringulo
Resistencia principal de transicin abierta
Autotransformador de transicin abierta
Dos velocidades Aplicaciones de motor de dos velocidades, por
ejemplo:
Dahlander (polo consecuente)
Inversor de polaridad
1 diagrama completo de la aplicacin
(incluidos la potencia y el control)
Control de bornero de conexin de 3 hilos (impulso)
3 diagramas parciales
(variantes de cableado de entrada
lgica de control)
Control de bornero de conexin de 2 hilos
(mantenido)
Control de bornero de conexin de 3 hilos (impulso)
con control de red seleccionable
Control de bornero de conexin de 2 hilos
(mantenido) con control de red seleccionable
Diagramas de cableado
1639505 06/2009 629
Contenido de esta seccin
Esta seccin contiene los siguientes apartados:
Apartado Pgina
Diagramas de cableado del modo de sobrecarga 630
Diagramas de cableado del modo independiente 634
Diagramas de cableado del modo de 2 sentidos de marcha 636
Diagramas de cableado del modo estrella-tringulo de dos tiempos 638
Diagramas de cableado del modo de resistencia principal de dos pasos 640
Diagramas de cableado del modo de autotransformador de dos tiempos 642
Diagramas de cableado del modo de dos velocidades: Devanado sencillo (polo
consecuente)
644
Diagramas de cableado del modo de dos velocidades: Devanado
independiente
646
Diagramas de cableado
630 1639505 06/2009
Diagramas de cableado del modo de sobrecarga
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 631
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagramas de cableado
632 1639505 06/2009
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagramas de cableado
1639505 06/2009 633
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
634 1639505 06/2009
Diagramas de cableado del modo independiente
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 635
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
636 1639505 06/2009
Diagramas de cableado del modo de 2 sentidos de marcha
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 637
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
638 1639505 06/2009
Diagramas de cableado del modo estrella-tringulo de dos tiempos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 639
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
640 1639505 06/2009
Diagramas de cableado del modo de resistencia principal de dos pasos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 641
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
642 1639505 06/2009
Diagramas de cableado del modo de autotransformador de dos tiempos
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 643
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
644 1639505 06/2009
Diagramas de cableado del modo de dos velocidades: Devanado sencillo (polo
consecuente)
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 645
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
646 1639505 06/2009
Diagramas de cableado del modo de dos velocidades: Devanado independiente
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso):
Diagramas de cableado
1639505 06/2009 647
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido)
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido):
Diagrama de aplicacin con control de bornero de conexin de 3 hilos (impulso) y control de red
seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 3 hilos (impulso) y control de red seleccionable:
Diagrama de aplicacin con control de bornero de conexin de 2 hilos (mantenido) y control de
red seleccionable
El siguiente diagrama de aplicacin presenta un diagrama de cableado con control
de bornero de conexin de 2 hilos (mantenido) y control de red seleccionable:
Diagramas de cableado
648 1639505 06/2009
1639505 06/2009 649
Glosario
1639505 06/2009
Glosario
A
analgica
Describe entradas (p.ej., la temperatura) o salidas (p.ej., la velocidad de un motor)
que se pueden establecer en un rango de valores. Comparar con discreta.
C
CANopen
Protocolo abierto estndar industrial utilizado en el bus de comunicaciones internas.
Este protocolo permite conectar cualquier dispositivo CANopen estndar al bus de
isla.
configuracin endian (big endian)
big endian significa que el byte/palabra de orden superior del nmero se almacena
en la memoria en la direccin ms baja posible, y el byte/palabra de orden inferior
en la direccin ms alta posible (big end va primero).
configuracin endian (little endian)
big endian significa que el byte/palabra de orden inferior del nmero se almacena
en la memoria en la direccin ms baja posible, y el byte/palabra de orden superior
en la direccin ms alta posible (little end va primero).
Glosario
650 1639505 06/2009
D
DeviceNet
DeviceNet es un protocolo de red basado en una conexin de bajo nivel que
depende de CAN, un sistema de bus serie sin una capa de aplicacin definida.
DeviceNet, define, por lo tanto, una capa para la aplicacin industrial de CAN.
DIN
Deutsches Institut fr Normung. La organizacin europea que organiza la creacin
y el mantenimiento de estndares dimensionales y de ingeniera.
discreta
Describe las entradas (p.ej., interruptores) o salidas (p.ej., bobinas) que slo
pueden estar Activadas o Desactivadas. Comparar con analgica.
dispositivo
A grandes rasgos, una unidad electrnica que se puede aadir a una red. Ms en
concreto, una unidad electrnica programable (p.ej., PLC, controlador numrico o
robot) o una tarjeta de E/S.
DPST
unipolar/bipolar. Un interruptor que conecta o desconecta 2 conductores de circuito
en un solo circuito de derivacin. Un interruptor DPST tiene 4 terminales, y es el
equivalente a 2 interruptores unipolares controlados por un solo mecanismo, como
se ilustra a continuacin:
Glosario
1639505 06/2009 651
F
factor de potencia
Llamado tambin coseno de pi (o ), el factor de potencia representa el valor
absoluto de la relacin de la potencia activa con la potencia aparente en sistemas
de alimentacin de CA.
FLC
corriente a plena carga. Tambin conocida como corriente nominal. La corriente
que recibe el motor segn la tensin nominal y la carga mxima admisible. El
controlador LTM R tiene 2 parmetros de FLC: FLC1 (Motor-relacin de corriente a
plena carga) y FLC2 (Motor-relacin de corriente a plena carga y alta velocidad), y
cada uno se establece como un porcentaje de FLC mx..
FLC1
Motor-relacin de corriente a plena carga. Parmetro de FLC para motores de
velocidad baja o nica.
FLC2
Motor-relacin de corriente a plena carga y alta velocidad. Parmetro de FLC para
motores de alta velocidad.
FLCmx
Corriente a plena carga-mx. Parmetro de corriente pico.
FLCmn
Corriente a plena carga-mn. La cantidad ms pequea de corriente del motor que
admite el controlador LTM R. Este valor viene determinado por el modelo de
controlador LTM R.
H
histresis
Valor, aadido al lmite de umbral inferior o restado del lmite de umbral superior,
que retarda la respuesta del controlador LTM R antes de que deje de medir la
duracin de los fallos y advertencias.
Glosario
652 1639505 06/2009
M
Modbus
Modbus
es el nombre del protocolo de comunicacin serie maestro-
esclavo/cliente-servidor desarrollado en 1979 por Modicon (ahora Schneider
Automation, Inc.), y desde entonces se ha convertido en el protocolo de red
estndar para la automatizacin industrial.
N
NTC
coeficiente negativo de temperatura. Caracterstica de un termistor, una resistencia
trmicamente sensible, cuya resistencia aumenta a medida que desciende su
temperatura y disminuye cuando su temperatura se eleva.
NTC analgico
Tipo de RTD.
P
PLC
controlador lgico programable.
potencia activa
Conocida tambin como potencia real, la potencia activa es la tasa de produccin,
transferencia o uso de la energa elctrica. Se mide en vatios (W) y a menudo se
expresa en kilovatios (kW) o megavatios (MW).
potencia aparente
El producto de la corriente y la tensin, la potencia aparente consta de potencia
activa y potencia reactiva. Se mide en voltios-amperios y a menudo se expresa en
kilovoltios-amperios (kVA) o megavoltios-amperios (MVA).
potencia nominal
Motor-potencia nominal. Parmetro de la potencia que generar un motor segn la
tensin nominal y la corriente nominal.
Glosario
1639505 06/2009 653
Profibus
Sistema de bus abierto que utiliza una red elctrica basada en un cable apantallado
de dos hilos o una red ptica basada en un cable de fibra ptica.
PT100
Tipo de RTD.
PTC
coeficiente positivo de temperatura. Caracterstica de un termistor, una resistencia
trmicamente sensible, cuya resistencia aumenta a medida que se eleva su
temperatura y disminuye cuando su temperatura desciende.
PTC analgico
Tipo de RTD.
PTC binario
Tipo de RTD.
R
Riel DIN
Un riel de montaje de acero, creado conforme a los estndares DIN (normalmente
35 mm de ancho), que facilita el montaje "a presin" de dispositivos elctricos IEC,
como el controlador LTM R y el mdulo de expansin. Comparar con la fijacin con
tornillos de dispositivos a un panel de control mediante el taladro de agujeros.
rms
valor eficaz. Mtodo para calcular la corriente y la tensin promedio de CA. Debido
a que la corriente CA y la tensin CA son bidireccionales, el promedio aritmtico de
corriente o tensin CA siempre es igual a 0.
RTD
detector de temperatura de resistencia. Termistor (sensor de resistencia trmica)
que se utiliza para medir la temperatura del motor. Es necesario para la funcin de
proteccin del motor Motor-sensor de temperatura del controlador LTM R.
Glosario
654 1639505 06/2009
T
TC
transformador de corriente.
TCC
caracterstica de curva de disparo. El tipo de retardo que se utiliza para disparar el
flujo de corriente en respuesta a una condicin de fallo. Cuando se implementan en
el controlador LTM R, los retardos de disparo de todas las funciones de proteccin
del motor son de tiempo definido, excepto en el caso de la funcin de sobrecarga
trmica, que tambin ofrece retardos de disparo de trmica inversa.
tensin nominal
Motor-tensin nominal. Parmetro de la tensin nominal.
trmica inversa
Una variedad de TCC donde el modelo trmico del motor genera la magnitud inicial
del retardo de disparo, que vara en respuesta a los cambios en el valor de la
cantidad medida (p.ej., la corriente). Comparar con tiempo definido.
tiempo de reinicio
Tiempo entre un cambio repentino en la cantidad supervisada (p.ej., la corriente) y
el cambio del rel de salida.
tiempo definido
Una variedad de TCC o TVC donde la magnitud inicial del retardo de disparo
permanece constante y no vara en respuesta a los cambios en el valor de la
cantidad medida (p.ej., la corriente). Comparar con trmica inversa.
TVC
caracterstica de tensin de disparo. El tipo de retardo que se utiliza para disparar
el flujo de tensin en respuesta a una condicin de fallo. Cuando el controlador
LTM R y el modelo de control la implementan, todas las TVC son de tiempo
definido.
1639505 06/2009 655
C
B
A
ndice
1639505 06/2009
ndice
A
activacin de advertencia
sobrecarga trmica, 550
activacin de advertencias
registro 1, 500
registro 2, 501
activacin de fallo
sobrecarga trmica, 550
activacin de la desviacin SNMP
puerto de red especfico de empresa 1,
506
activacin de los botones locales
control a distancia, 505
actualizacin del firmware
puerto de red, 425
advertencia
configuracin de LTM E, 488
puerto interno, 541
temperatura interna del controlador, 487,
541
advertencia-cdigo, 487
advertencias-nmero, 70, 474
agarrotamiento, 114
activacin de advertencia, 115
activacin de fallo, 115
tiempo sobrepasado de fallo, 115
umbral de advertencia, 115
agarrotamiento -
activacin de advertencia, 359, 500, 552,
594
activacin de fallo, 359, 500, 552, 594
advertencia, 487, 539
fallo, 482, 539
nmero de fallos, 71, 473, 539
tiempo sobrepasado de fallo, 359, 499,
552
umbral de advertencia, 359, 499, 552
umbral de fallo, 359, 499, 552
ajuste de direccin IP
ethernet maestra, 384, 507
Ethernet maestra, 424
ajuste del canal
control a distancia, 505
archivo de configuracin, 229
crear, 377
gestionar, 377
guardar, 380
transferir, 378, 378, 379, 379
archivo de lgica, 229
arranque prolongado, 111
activacin de fallo, 112
tiempo sobrepasado de fallo, 112
umbral de fallo, 112
arranque prolongado-
activacin de fallo, 359, 500, 552, 594
advertencia, 539
fallo, 482, 539
nmero de fallos, 71, 363, 473, 539
tiempo sobrepasado de fallo, 101, 194,
358, 359, 499, 550, 552, 591, 594
umbral de fallo, 194, 359, 499, 552, 594
Index
656 1639505 06/2009
B
bloqueo
umbral de fallo, 115
bloqueo-
tiempo sobrepasado de fallo, 594
umbral de advertencia, 594
umbral de fallo, 594
borrar configuracin de puerto de red-
comando, 248, 398, 509
borrar configuracin del controlador-
comando, 248, 398, 509
borrar histricos-
comando, 247, 398, 509
borrar nivel de capacidad trmica-
comando, 93, 248, 398, 509
borrar todo-
comando, 247, 398, 509
C
cableado
fallo, 59
cableado de control, 202
cableado-
activacin de fallo, 59, 362, 501, 590
fallo, 483, 530, 541
nmero de fallos, 72, 474, 541
cada de tensin
ajuste, 497
deteccin, 489
producida, 489
tiempo sobrepasado de rearranque, 161,
164, 362, 497, 556, 556
umbral, 161, 164, 362, 497, 556, 556,
598
umbral de rearranque, 161, 164, 362,
497, 556, 556,598
tiempo sobrepasado, 598
campo
Ethernet ampliado 1 disponible, 491
canales de control, 184, 185
bornero de conexin, 186
HMI, 186
red, 187
seleccionar, 185
caractersticas de las entradas lgicas
controlador LTM R, 580
caractersticas de las salidas lgicas
controlador LTM R, 580
caractersticas de tensin de control
controlador LTM R, 580
ciclo de arranque, 194
ciclo rpido-
bloqueo, 142, 484, 513
tiempo sobrepasado de bloqueo, 142,
362, 496, 588
circuito de control
2 hilos, 202
3 hilos, 202
comando
borrar configuracin de puerto de red,
451
borrar configuracin del controlador,
352, 451
borrar histricos, 69, 352, 450
borrar IP, 449
borrar nivel de capacidad trmica, 450
borrar todo, 55, 302, 450
copia de seguridad de datos FDR, 416,
509
histricos, 55
marcha hacia atrs del motor, 515
marcha hacia delante del motor, 515
restauracin de datos FDR, 416, 509
salida analgica 1, 419, 515
comando clear all , 391
comando-
borrar nivel de capacidad trmica, 239
comportamiento de entrada lgica
modo de funcionamiento de 2 sentidos
de marcha, 216
modo de funcionamiento de dos tiempos,
222
modo de funcionamiento de dos veloci-
dades, 227
modo de funcionamiento de sobrecarga,
209
modo de funcionamiento independiente,
212
comportamiento de las entradas lgicas, 202
Index
1639505 06/2009 657
comportamiento de las salidas lgicas, 204
comportamiento de salida lgica
modo de funcionamiento de 2 sentidos
de marcha, 216
modo de funcionamiento de dos pasos,
222
modo de funcionamiento de dos veloci-
dades, 227
modo de funcionamiento de sobrecarga,
209
modo de funcionamiento independiente,
212
comprobacin automtica, 500, 569, 570
comprobacin automtica-
activacin, 569
comando, 508, 515, 569, 570
condicin de rearranque automtico
con retardo, 489
inmediato, 489
manual, 489
conexin del PC al controlador LTM R, 392
configuracin de corriente a plena carga,
306
configuracin de FLC, 306
configuracin de hardware, 319
configuracin de hardware independiente
del controlador
LTM R , 320
configuracin mediante
herramienta HMI-activacin, 299
puerto de red-activacin, 299
teclado de HMI-activacin, 299
configuracin mediante herramienta HMI-
activacin, 390, 498, 603
configuracin mediante puerto de red-
activacin, 386, 498, 601
configuracin mediante teclado de HMI-
activacin, 390, 498, 603
ConneXview, 438
contactor-calibre, 499, 588
contador
clientes Ethernet abiertos, 431, 493
clientes Ethernet abiertos disponible,
491
mensajes de error Ethernet MB envia-
dos, 432, 493
mensajes de error Ethernet MB enviados
disponible, 491
mensajes Ethernet MB enviados, 432,
494
mensajes Ethernet MB enviados disponi-
ble, 491
mensajes Ethernet MB recibidos, 432,
494
mensajes Ethernet MB recibidos disponi-
ble, 491
servidores Ethernet abiertos, 431, 493
servidores Ethernet abiertos disponible,
491
tramas correctas Ethernet recibidas,
431, 493
tramas correctas Ethernet recibidas dis-
ponible, 491
tramas correctas Ethernet transmitidas,
431, 493
tramas correctas Ethernet transmitidas
disponible, 491
contadores
fallos internos, 73
prdida de comunicacin, 73
contadores de fallos
proteccin, 71
control
ajuste de canal local, 505
modo de transferencia, 505, 589
transicin directa, 217, 224, 356, 505,
588
control a distancia
ajuste del canal, 589
control de ajuste
canal local, 356, 589
control mediante HMI, 484, 513
controlador
duracin del ltimo apagado, 489, 546
reduccin de potencia segn altitud, 581
temperatura interna, 54
controlador LTM R
descripcin fsica, 28
especificaciones tcnicas, 578
Index
658 1639505 06/2009
controlador-
activacin de advertencia de temperatu-
ra interna, 54, 500
cdigo de compatibilidad, 471
cdigo de identificacin, 471
configuracin de suma de comproba-
cin, 488
configuracin necesaria de sistema, 302,
498
fallo de temperatura interna, 541
fallo interno, 53, 482
ID de puerto, 490
nmero de fallos de temperatura interna,
541
nmero de fallos internos, 73, 364, 473
nmero de serie, 471
potencia, 484, 513
referencia comercial, 366, 471
temperatura interna, 488
temperatura interna mx., 55, 363, 473,
546
versin del firmware, 471
corriente
L1, 489
L1-relacin, 35
L2, 490
L2-relacin, 35
L3, 490
L3-relacin, 35
media, 40, 489
tierra, 490
corriente a plena carga-mx., 74, 471, 543
n-0, 475
n-1, 476
n-2, 477
n-3, 478
n-4, 479
corriente de fuga a tierra externa-
tiempo sobrepasado de fallo, 593
umbral de advertencia, 593
umbral de fallo, 593
corriente de tierra, 37, 123, 532
activacin de advertencia, 123
activacin de fallo, 123
n-0, 480
n-1, 480
n-2, 480
n-3, 481
n-4, 481
corriente de tierra de externa-
umbral de advertencia, 496
corriente de tierra externa, 127
corriente de tierra externa-
tiempo sobrepasado de fallo, 128, 359,
496, 552
umbral de advertencia, 128, 359, 552
umbral de fallo, 128, 359, 496, 552
corriente de tierra interna, 124
corriente de tierra interna-
tiempo sobrepasado de fallo, 126, 359,
499, 552, 593
umbral de advertencia, 126, 359, 499,
552, 593
umbral de fallo, 126, 359, 499, 552, 593
corriente de tierra-
activacin de advertencia, 359, 500, 552,
593
activacin de fallo, 500, 552, 593
advertencia, 487, 539
fallo, 482, 539
modo, 37, 123, 124, 127, 359, 496
n-0, 543
nmero de fallos, 71, 363, 473, 539
relacin, 37, 354, 488
relacin n-0, 543
corriente de tierra-relacin, 74
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
corriente en nivel, 194
Index
1639505 06/2009 659
corriente L1
n-0, 480
n-1, 480
n-2, 480
n-3, 481
n-4, 481
corriente L1-
desequilibrio superior, 490
n-0, 543
relacin, 488
relacin n-0, 543
corriente L1-desequilibrio superior, 104
corriente L1-relacin, 74, 354
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
corriente L2
n-0, 480
n-1, 480
n-2, 480
n-3, 481
n-4, 481
corriente L2-
desequilibrio superior, 490
n-0, 543
relacin, 488
relacin n-0, 543
corriente L2-desequilibrio superior, 104
corriente L2-relacin, 74, 354
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
corriente L3
n-0, 480
n-1, 480
n-2, 480
n-3, 481
n-4, 481
corriente L3-
desequilibrio superior, 490
n-0, 543
relacin, 488
relacin n-0, 543
corriente L3-desequilibrio superior, 104
corriente L3-relacin, 74, 354
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
corriente media, 530, 532
n-0, 364, 480
n-1, 365, 480
n-2, 480
n-3, 481
n-4, 481
corriente media-
n-0, 543
relacin, 40, 354, 488
relacin n-0, 543
corriente media-relacin, 74, 349, 530
n-0, 475
n-1, 476
n-2, 477
n-3, 478
n-4, 479
corriente-
activacin de advertencia de desequili-
brio de fases, 500, 552
activacin de advertencia de prdida de
fase, 501, 552
activacin de fallo de desequilibrio de fa-
ses, 500, 552
activacin de fallo de inversin de fases,
501, 552
activacin de fallo de prdida de fase,
501, 552
advertencia de desequilibrio de fases,
Index
660 1639505 06/2009
487, 539
advertencia de inversin de fases, 539
advertencia de prdida de fase, 487, 539
desequilibrio de fases n-0, 543
fallo de desequilibrio de fases, 482, 539
fallo de inversin de fases, 483, 539
fallo de prdida de fase, 483, 539
mx. del sensor, 471
nmero de fallos de desequilibrio de fa-
ses, 473, 539
nmero de fallos de prdida de fase, 474,
539
rango mx., 471
relacin de escala, 471
tiempo sobrepasado de fallo de desequi-
librio de fases en arranque, 499, 552
tiempo sobrepasado de fallo de desequi-
librio de fases en marcha, 499, 552
tiempo sobrepasado de prdida de fase,
496, 552
umbral de advertencia de desequilibrio
de fases, 499, 552
umbral de fallo de desequilibrio de fases,
499, 552
corriente-activacin
fallo de inversin de fases, 110
fallo de prdida de fase, 108
corriente-activacin de advertencia
desequilibrio de fases, 358
prdida de fase, 108, 358
corriente-activacin de advertencia de
desequilibrio de fases, 593
prdida de fase, 594
corriente-activacin de fallo
desequilibrio de fases, 358
inversin de fases, 358
prdida de fase, 358
corriente-activacin de fallo de
desequilibrio de fases, 593
inversin de fases, 594
prdida de fase, 594
corriente-comienzo de tiempo sobrepasado
para fallo de desequilibrio de fases, 593
corriente-desequilibrio de fases, 74, 103,
354, 488, 532
activacin de advertencia, 105
activacin de fallo, 105
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tiempo sobrepasado de fallo en el arran-
que, 105
tiempo sobrepasado de fallo en marcha,
105
umbral de advertencia, 105
umbral de fallo, 105
corriente-nmero de fallos
desequilibrio de fases, 71, 363
inversin de fases, 71
prdida de fase, 71
corriente-tiempo sobrepasado
fallo de desequilibrio de fases en mar-
cha, 358
prdida de fase, 108, 358
corriente-tiempo sobrepasado
para fallo de desequilibrio de fases en
marcha, 593
corriente-tiempo sobrepasado de fallo
desequilibrio de fases en arranque, 358
corriente-tiempo sobrepasado de prdida de
fase, 594
corriente-umbral de advertencia
desequilibrio de fases, 358
corriente-umbral de advertencia de
desequilibrio de fases, 593
corriente-umbral de fallo
desequilibrio de fases, 358
corriente-umbral de fallo de
desequilibrio de fases, 593
corrientes de lnea, 35
CT de carga-
mltiples pasos, 499, 590
primario, 499, 590
relacin, 471, 590
secundario, 499, 590
Index
1639505 06/2009 661
CT de tierra-
primario, 37, 127, 496, 590
secundario, 37, 127, 496, 590
D
descarga, 160, 362, 484, 513
descarga-
tiempo sobrepasado, 161, 362, 497, 556
descarga-nmero, 77, 474
descripcin fsica
mdulo de expansin, 31
descripcin fsica
controlador LTM R, 28
desequilibrio de corrientes de fase, 42
desequilibrio de tensin, 46
desequilibrio de tensin de red, 46
deslastrado-
tiempo sobrepasado, 598
deteccin automtica
Ethernet admitida, 493
Ethernet configurada, 493
Ethernet operativa, 493
detencin
desactivacin de HMI, 505
detencin de la desactivacin
bornero de conexin, 505
detener
desactivacin de HMI, 589
desactivacin del bornero de conexin,
589
diagnstico
Ethernet, 426
diagnstico-
activacin de advertencia, 56, 362, 501,
590
activacin de fallo, 56, 362, 501, 590
advertencia, 487, 541
fallo, 72, 483, 541
nmero de fallos, 72, 541
diagnsticos-
nmero de fallos, 474
direccin de pasarela
Ethernet, 404
direccin IP
Ethernet, 404
direccin MAC
Ethernet disponible, 491
direccionamiento IP, 403
E
enlace
Ethernet, 401
enlace de comunicacin, 392
entradas de CA del controlador
registro de ajuste, 495
entradas lgicas de CA del controlador
configuracin, 495
especificaciones tcnicas
controlador LTM R, 578
mdulo de expansin LTM E, 582
estado de E/S, 486
estado de funcionamiento del sistema, 80
estado del motor, 81
mnimo-tiempo de espera, 81
estado de restauracin
FDR, 494
estado de servicios
Ethernet, 492
estado del sistema
entradas lgicas, 419, 485, 514
registro 1, 484
registro 2, 419, 484, 513
salidas lgicas, 419, 485, 514
estado global
Ethernet, 491, 491
Ethernet disponible, 491
estados de funcionamiento, 184, 190
arranque, 190
funciones de proteccin, 192
listo, 190
marcha, 190
no listo, 190
Ethernet, 491, 491, 492
ajuste de contacto del sistema SNMP,
388, 437, 507, 602
ajuste de desviacin del nombre de co-
Index
662 1639505 06/2009
munidad SNMP, 388, 437, 507, 602
ajuste de direccin 1 de administrador
SNMP, 388, 507, 602
Ajuste de direccin 1 de administrador
SNMP, 437
ajuste de direccin 2 de administrador
SNMP, 388, 507, 602
Ajuste de direccin 2 de administrador
SNMP, 437
ajuste de direccin de pasarela, 382,
406, 433, 447, 507, 601
ajuste de direccin IP, 382, 406, 433,
447, 507, 601
ethernet
ajuste de direccin IP maestra, 446
Ethernet
ajuste de mscara de subred, 382, 406,
433, 447, 507, 601
ajuste de nombre de comunidad SNMP,
388, 437, 507, 602
ajuste de nombre del sistema SNMP,
388, 437, 507
ajuste de obtencin de nombre de comu-
nidad SNMP, 388, 437, 507, 602
ajuste de ubicacin del sistema SNMP,
388, 437, 507, 602
capacidad de asignacin IP, 433
contador de clientes abiertos, 431
contador de mensajes de error MB en-
viados, 432
contador de mensajes MB enviados, 432
contador de mensajes MB recibidos, 432
contador de servidores abiertos, 431
contador de tramas correctas recibidas,
431
contador de tramas correctas transmiti-
das, 431
diagnstico, 426
direccin de pasarela, 429, 492, 535
direccin IP, 428, 492, 535
direccin MAC, 429, 493, 535
estado de servicios, 428
estado de trama, 430
estado global, 427
mscara de subred, 428, 492, 535
nombre de dispositivo, 432, 494, 535
validez de diag HW bsico, 426, 491
validez de servicios, 428
Ethernet II
registros de tramas, 493
Ethernet-
asignacin IP operativa, 434, 494
capacidad de asignacin IP, 494
expansin-
cdigo de compatibilidad, 471
cdigo de identificacin, 471
nmero de serie, 471
referencia comercial, 366, 471
versin de firmware, 471
exploracin de E/S
configurar, 422
F
factor de potencia, 48, 74, 354, 488, 532
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
factor de potencia excesivo, 179
activacin de advertencia, 600
umbral de advertencia, 600
umbral de fallo, 600
factor de potencia excesivo-
activacin de advertencia, 180, 361, 501,
558
activacin de fallo, 180, 361, 501, 600
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 474, 540
tiempo sobrepasado de fallo, 180, 361,
497, 558, 600
umbral de advertencia, 180, 361, 498,
558, 558
umbral de fallo, 180, 361, 497, 558
factor de potencia insuficiente, 176
Index
1639505 06/2009 663
factor de potencia insuficiente-
activacin de advertencia, 177, 361, 501,
558, 600
activacin de fallo, 177, 361, 501, 558,
600
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 474, 540
tiempo sobrepasado de fallo, 177, 361,
497, 558, 600
umbral de advertencia, 177, 361, 497,
558, 600
umbral de fallo, 177, 361, 497, 558, 600
factor de potencia-
n-0, 543
fallo
cableado, 530
configuracin de LTM E, 483
infracorriente, 482, 539
fallo de infracorriente-
activacin, 359, 500, 553, 595
umbral, 359, 499
Fallo de infracorriente-
umbral, 553
fallo externo, 541
fallo-
comando de reinicio, 351, 508, 515
reinicio autorizado, 484, 513, 530
fallo-cdigo, 74, 246, 246, 482
n-0, 364, 475, 543
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
fallo-modo de reinicio, 351, 357, 498, 589
a distancia, 244
automtico, 238
manual, 235
fallo-peticin de apagar y encender, 484,
513, 530
fallos de diagnstico
fallos de cableado, 59
prdida de comunicacin, 62
fallos de supervisin de sistema y dispositivo
errores de diagnstico de comandos de
control, 56
fallos-nmero, 70, 363, 474
FDR, 411
referencia comercial del destino, 494
versin, 494
fecha y hora, 74
ajuste, 504, 604
n-0, 475
n-1, 476
n-2, 477
n-3, 478
n-4, 479
fecha y hora-
n-0, 364, 543
n-1, 365
FLC, 194, 224
FLC1, 224
FLC2, 224
FLCmx, 306
FLCmn, 306
formato
trama Ethernet disponible, 491
frecuencia, 45, 74, 488, 532
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
frecuencia-
n-0, 543
funciones de control del motor, 183
funciones de medicin y supervisin, 33
Index
664 1639505 06/2009
funciones de proteccin, 85
advertencias, 86
alimentacin, 169
cableado, 192, 233
comunicacin, 234
configuracin, 192, 233
corriente, 193, 234
diagnstico, 192, 233
estados de funcionamiento, 192
fallos, 86
interna, 233
interno, 192
motor-sensor de temperatura, 192, 233
personalizadas, 85
potencia, 193, 234
sobrecarga trmica, 192, 234
tensin, 144, 193, 234
trmica y de corriente, 90
funciones de proteccin del motor, 87
agarrotamiento, 114
arranque prolongado, 111
corriente de tierra, 123
corriente de tierra externa, 127
corriente de tierra interna, 124
corriente-desequilibrio de fases, 103
factor de potencia excesivo, 179
factor de potencia insuficiente, 176
funcionamiento, 87
infracorriente, 117
infratensin, 153
inversin de corrientes de fase, 110
inversin de tensin de fase, 152
motor-sensor de temperatura-PT100,
133
prdida de corriente de fase, 107
prdida de tensin de fase, 149
potencia excesiva, 173
potencia insuficiente, 170
sensor de temperatura de motor-NTC
analgico, 139
sensor de temperatura de motor-PTC
analgico, 136
sensor de temperatura de motor-PTC bi-
nario, 131
sensor de temperatura del motor, 130
sobrecarga trmica, 91
sobrecarga trmica - trmica inversa, 92
sobrecarga trmica - tiempo definido, 99
sobrecorriente, 120
sobretensin, 156
tensin-desequilibrio de fases, 145
G
gestin de fallos, 230
introduccin, 231
grado del sensor de temperatura del motor,
488, 532
n-0, 480, 481
n-1, 480
n-2, 480
n-3, 481
gua de seleccin del sistema, 24
H
histresis, 89
historial del motor, 75
arranques del motor, 76
arranques del motor por hora, 76
corriente mxima del ltimo arranque, 78
hora del ltimo arranque, 79
tiempo de funcionamiento del motor, 79
histricos de fallos, 68
historial, 74
HMI - color de LED de estado del motor, 498,
604
HMI-
activacin de advertencia de puerto, 63,
362, 390, 500, 603
activacin de factor de potencia, 504,
605
activacin de fallo de puerto, 63, 362,
390, 500, 603
activacin de sensor de temperatura del
motor, 503, 604
activacin de visualizacin de arranques
por hora, 503, 605
activacin de visualizacin de capacidad
Index
1639505 06/2009 665
trmica restante, 504, 604
activacin de visualizacin de consumo,
504, 605
activacin de visualizacin de corriente
de tierra, 503, 605
activacin de visualizacin de corriente
L1, 503, 604
activacin de visualizacin de corriente
L2, 503, 605
activacin de visualizacin de corriente
L3, 503, 605
activacin de visualizacin de corriente
media, 503, 604
activacin de visualizacin de desequili-
brio de fases de corriente, 503, 605
activacin de visualizacin de desequili-
brio de fases de tensin, 504, 605
activacin de visualizacin de estado del
motor, 503, 605
activacin de visualizacin de estado
E/S, 503, 605
activacin de visualizacin de fecha,
504, 605
activacin de visualizacin de frecuen-
cia, 503, 605
activacin de visualizacin de histricos
de inicio, 503, 605
activacin de visualizacin de nivel de
capacidad trmica, 503, 604
activacin de visualizacin de potencia,
504, 605
activacin de visualizacin de potencia
reactiva, 503, 605
activacin de visualizacin de relacin
de corriente L1, 504, 605
activacin de visualizacin de relacin
de corriente L2, 504, 605
activacin de visualizacin de relacin
de corriente L3, 504, 605
activacin de visualizacin de relacin
de corriente media, 504, 605
activacin de visualizacin de tensin
L1-L2, 504, 605
activacin de visualizacin de tensin
L2-L3, 504, 605
activacin de visualizacin de tensin
L3-L1, 504, 605
activacin de visualizacin de tensin
media, 504, 605
activacin de visualizacin de tiempo,
504, 605
activacin de visualizacin de tiempo de
funcionamiento, 503
activacin de visualizacin de tiempo
hasta el disparo, 504, 604
activacin de visualizacin del modo de
control, 503, 604
activacin de visualizacin del tiempo de
funcionamiento, 605
advertencia de puerto, 487, 540
ajuste de brillo de visualizacin, 499, 604
ajuste de direccin de puerto, 326, 390,
498, 603
ajuste de idioma, 503, 604
ajuste de paridad de puerto, 326, 352,
390, 498, 603
ajuste de recuperacin de puerto, 63,
327, 390, 502, 603
ajuste de velocidad de transmisin en
baudios del puerto, 326, 352, 390, 498,
603
ajuste endian de puerto, 326, 362, 390,
498, 603
fallo de puerto, 482, 540
HMI-nmero de fallos de puerto, 363
nmero de fallos de puerto, 73, 473, 540
prdida de comunicacin con el puerto,
484, 513
registro 1 de elementos de visualizacin, 503
registro 2 de elementos de visualizacin,
504
registro de ajuste de contraste de visua-
lizacin, 499
registro de ajuste de idioma, 503
visualizacin de ajuste de contraste, 499,
604
HMI-contrasea de teclado, 603
HMI-registro 3 de elementos de visualiza-
cin, 504
Index
666 1639505 06/2009
I
infracorriente, 117
activacin de advertencia, 118
activacin de fallo, 118
tiempo sobrepasado de fallo, 118
umbral de advertencia, 118
umbral de fallo, 118
infracorriente-
advertencia, 487, 539
advertencia activacin, 359, 500, 553,
595
nmero de fallos, 71, 363, 473, 539
tiempo sobrepasado de fallo, 359, 499,
553, 595
umbral de advertencia, 359, 499, 553,
595
umbral de fallo, 595
infratensin, 153
infratensin-
activacin de advertencia, 154, 360, 501,
555, 597
activacin de fallo, 154, 360, 501, 555,
597
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 363, 474, 540
tiempo sobrepasado de fallo, 154, 360,
497, 555, 597
umbral de advertencia, 154, 360, 497,
555, 597
umbral de fallo, 154, 360, 497, 555, 597
introduccin, 15
inversin de corrientes de fase, 110
secuencia de fases, 110
inversin de tensin de fase, 152
IP
Ethernet servido por asignacin almace-
nada disponible, 494, 494
Ethernet servido por MAC BootP disponi-
ble, 494, 494
Ethernet servido por MAC DHCP dispo-
nible, 494, 494
Ethernet servido por nombre disponible,
494, 494
IP maestra, 423
L
L1-L2 desequilibrio mayor, 146
L2-L3 desequilibrio mayor, 146
L3-L1 desequilibrio mayor, 146
lgica personalizada-
control de red, 511
espacio de memoria, 511
espacio no voltil, 511
espacio temporal, 511
inversin de fases, 511
LED aux. 1, 511, 530
LED aux. 2, 511, 530
LED de detencin, 511
LO1, 511
LO2, 511
LO3, 511
LO4, 511
marcha , 511
memoria utilizada, 511
parada, 511
reinicio, 511
seleccin de FLC, 511
transicin, 511
versin, 511
lgica-entrada, 530
lgica-salida, 530
M
mantenimiento, 561
deteccin de problemas, 562
solucin de problemas, 564
mantenimiento preventivo, 567
entorno, 568
histricos, 567
parmetros de configuracin, 567
mapa de usuario-
direcciones, 455
valores, 455
mapa de usuario-direcciones, 510
mapa de usuario-valores, 510
marca de hora, 570
mscara de subred
Ethernet, 404
Ethernet disponible, 491
Index
1639505 06/2009 667
media
corriente, 532
mensajera del puerto 502
Ethernet, 492
mnimo-tiempo de espera, 482, 530
mirroring
cambio de la tabla de entradas, 419, 512
cambio de la tabla de salidas, 419, 512
registro 1 de estado del sistema, 419,
513
registro de estado, 419, 512
renovacin de la tabla de salidas, 419,
512
renovacin de tabla de entradas, 419,
512
validez de la tabla de entradas, 419, 512
validez de la tabla de salidas, 419, 512
Modbus
IP maestra, 423
modo
asignacin IP Ethernet disponible, 491
cada de tensin, 556
modo
sobrecarga trmica, 591
modo cada
tensin, 497
modo cada
de tensin, 598
modo cada de tensin, 164, 556
modo de control
configuracin, 498
modo de funcionamiento personalizado, 229
modo de funcionamiento predefinido del mo-
tor
2 sentidos de marcha, 214
dos tiempos, 218
dos velocidades, 224
independiente, 210
sobrecarga, 207
modo de transferencia de control, 187, 356
modo local predeterminado
control a distancia, 505
modo tensin, 161
modos de funcionamiento, 198
2 sentidos de marcha, 214
dos tiempos, 218
dos velocidades, 224
grfica, 191
independiente, 210
introduccin, 201
personalizado, 229
sobrecarga, 207
modos de funcionamiento predefinidos
cableado de control y gestin de fallos,
205
mdulo de expansin
descripcin fsica, 31
mdulo de expansin LTM E
especificaciones tcnicas, 582
motor
estrella-tringulo, 498, 588
modo de funcionamiento personalizado,
229
modo de funcionamiento predefinido,
201
sensor de temperatura, 44
motor-
activacin de advertencia de sensor de
temperatura, 501
activacin de fallo de sensor de tempera-
tura , 501
advertencia de sensor de temperatura ,
487, 539
bloqueo transicin, 484, 513
clase de disparo, 96, 358, 499, 550, 591
comando de baja velocidad, 224, 508,
515
comando de funcionamiento hacia atrs,
214, 218, 224, 508
comando de funcionamiento hacia de-
lante, 210, 214, 218, 224, 508
corriente del ltimo arranque, 78, 363,
490, 546
duracin del ltimo arranque, 79, 363,
490, 546
en arranque, 484, 513
en marcha, 484, 513
Index
668 1639505 06/2009
fallo de sensor de temperatura, 539
fallo de sensor de temperatura , 483
fases, 59, 498, 588
modo de funcionamiento, 495, 588
nmero de arranques, 76
nmero de arranques L01, 76, 474, 546
nmero de arranques L02, 76, 474, 546
nmero de arranques por hora, 76, 490,
546
nmero de fallos de sensor de tempera-
tura, 71, 474, 539
potencia a plena carga, 170, 173
potencia nominal, 356, 497, 588
refrigeracin por ventilador auxiliar, 91,
96, 356, 498, 591
relacin de corriente a plena carga, 74,
96, 101, 224, 358
relacin de corriente a plena carga
(FLC1), 503, 591
relacin de corriente a plena carga y alta
velocidad, 96, 101, 224, 358, 550
relacin de corriente a plena carga y alta
velocidad (FLC2), 503
relacin de corriente media, 484, 513
secuencia de fases, 152, 498, 588
sensor de temperatura, 354
tensin nominal, 153, 156, 356, 496, 588
tiempo de reinicio indeterminado, 484,
513
tiempo sobrepasado de paso 1 a 2, 218,
356, 502, 588
tiempo sobrepasado de transicin, 217,
218, 224, 356, 495, 588
tipo de sensor de temperatura, 59, 131,
136, 139, 496
umbral de advertencia de sensor de tem-
peratura, 496
umbral de fallo de sensor de temperatu-
ra, 496
umbral de paso 1 a 2, 218, 356, 502, 588
velocidad, 484, 513
motor- activacin de fallo
de sensor de temperatura, 592
motor-activacin de advertencia
sensor de temperatura, 356, 550
motor-activacin de fallo
de sensor de temperatura, 592
sensor de temperatura, 130, 356, 550
motor-advertencia de sensor
temperatura, 130
motor-alta velocidad, 530
motor-corriente a plena carga mx
n-0, 364
n-1, 365
motor-en arranque, 81, 530
motor-en marcha, 81, 530
motor-modo de funcionamiento
2 sentidos de marcha, 201
dos tiempos, 201
dos velocidades, 201
independiente, 201
sobrecarga, 201
motor-nmero de arranques, 363, 473, 546
motor-relacin de corriente
a plena carga y alta velocidad (FLC2),
591
motor-relacin de corriente a plena carga,
543, 550
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
motor-secuencia de fases, 110
motor-sensor de temperatura, 74, 488
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
PT100, 133
umbral de advertencia en grados, 134
umbral de fallo en grados, 134
visualizacin grados CF, 134
motor-tipo de sensor
de temperatura, 592
temperatura, 130
motor-umbral de advertencia
de sensor de temperatura, 592
sensor de temperatura, 137, 140, 356,
Index
1639505 06/2009 669
550
motor-umbral de fallo
de sensor de temperatura, 592
sensor de temperatura, 137, 140, 356,
550
N
nivel de capacidad trmica, 43, 74, 92, 96,
354, 488, 532
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
nivel de capacidad trmica-
n-0, 543
nombre
dispositivo Ethernet disponible, 491
NTC analgico, 139
nmero
rearranques automticos con retardo,
474
rearranques automticos inmediatos,
474
rearranques automticos manuales, 474
nmero de advertencias, 71
proteccin, 71
nmero de fallos
arranque prolongado, 539
factor de potencia excesivo, 540
factor de potencia insuficiente, 540
P
parmetros
configurables, 587
parmetros configurables, 87
pasarela
Ethernet disponible, 491
prdida de corriente de fase, 107
prdida de tensin de fase, 149
potencia activa, 48, 50, 74, 354, 488, 532
n-0, 364, 475, 543
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
potencia activa-
consumo, 51, 474
potencia aparente, 48
potencia excesiva, 173
potencia excesiva-
activacin de advertencia, 174, 361, 501,
558, 599
activacin de fallo, 174, 361, 361, 501,
558, 599
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 474, 540
tiempo sobrepasado de fallo, 174, 361,
497, 555, 558, 599
umbral de advertencia, 174, 497, 555,
558, 599
umbral de fallo, 174, 361, 497, 555, 558,
599
potencia insuficiente, 170
potencia insuficiente-
activacin de advertencia, 171, 361, 501,
558, 599
activacin de fallo, 171, 361, 501, 558,
599
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 474, 540
tiempo sobrepasado de fallo, 171, 497,
558, 599
tiempo sobrepasado de fallo en arran-
que, 361
umbral de advertencia, 171, 361, 497,
558, 599
umbral de fallo, 171, 361, 497, 558, 599
potencia nominal, 588
potencia reactiva, 50, 354, 488, 532
potencia reactiva-
consumo, 51, 474
primer encendido, 302
Index
670 1639505 06/2009
principios
control, 199
prueba-
fallo, 482, 541
PT100, 133
PTC analgico, 136
PTC binario, 131
puerto de red
activacin de la copia de seguridad auto-
mtica FDR, 386, 416, 506, 601
activacin de las prdidas del entorno de
la desviacin SNMP, 506
activacin del arranque en caliente de la
desviacin SNMP, 506, 602
activacin del arranque en fro de la des-
viacin SNMP, 506, 602
activacin del enlace ascendente de la
desviacin SNMP, 506, 602
activacin del enlace descendente de la
desviacin de SNMP, 506, 602
activacin del error de autenticacin de
la desviacin SNMP, 437
activacin del error de autentificacin de
la desviacin SNMP, 388, 506, 602
actualizacin del firmware, 425
ajuste 1 de la desviacin SNMP, 506
ajuste de la periodicidad de la copia de
seguridad automtica FDR, 386, 416,
506, 601
ajuste del tipo de trama, 382, 601
ajuste sincro FDR, 447
desactivacin FDR, 386, 506, 601
estado FDR, 415, 418, 489, 535
intervalo del controlador FDR, 447
tipo de trama, 430, 446, 506
puerto de red-
activacin de advertencia, 62, 362, 384,
448, 500, 601
activacin de fallo, 62, 362, 384, 448,
500, 601
advertencia, 487, 540
ajuste de recuperacin, 62, 384, 424,
448, 504, 601
ajuste endian, 357, 362, 382, 498, 602
cdigo de compatibilidad, 471
cdigo de identificacin, 366, 471
comprobacin automtica en curso, 489
comunicacin en curso, 489
conectado, 489
configuracin incorrecta, 489
deteccin automtica en curso, 489
fallo, 482, 540
fallo de configuracin, 482, 540
fallo interno, 541
nmero de fallos, 73, 364, 473, 540
nmero de fallos de configuracin, 73,
364, 473, 540
nmero de fallos internos, 73, 363, 541
prdida de comunicaciones, 484, 513
supervisin, 489
tiempo sobrepasado de prdida de co-
municaciones, 62, 362, 384, 402, 424,
448, 506, 601
versin de firmware, 366, 425, 471
puerto interno-
fallo, 482, 541
nmero de fallos, 73, 364, 473, 541
puesta en marcha
comprobacin de la configuracin, 316
comprobacin del cableado, 312
introduccin, 298
primer encendido, 302
R
rearme automtico-
ajuste intentos grupo 1, 240, 357
ajuste intentos grupo 2, 240, 357
ajuste intentos grupo 3, 241, 357
nmero, 70
tiempo sobrepasado grupo 1, 240, 357
tiempo sobrepasado grupo 2, 240, 357
tiempo sobrepasado grupo 3, 241, 357
rearme tras fallo
reinicio automtico-activo, 513
rearranque automtico, 163
registro de estado, 489
tiempo sobrepasado inmediato, 598
tiempo sobrepasado de retardo, 598
Index
1639505 06/2009 671
rearranque automtico con retardo
tiempo sobrepasado, 164, 498, 556
rearranque automtico inmediato
tiempo sobrepasado, 164, 497, 556
receptor
tramas Ethernet II admitido, 493
tramas Ethernet II configurado, 493
tramas Ethernet II operativo, 493
recuperacin
transicin de control, 189
reduccin de potencia segn altitud
controlador, 581
mdulo de expansin LTM E, 584
registro
advertencia 1, 487
advertencia 2, 487
advertencia 3, 488
ajuste de control, 505
control 1, 419, 508, 515
control 2, 509
fallos 1, 482
fallos 2, 483
fallos 3, 483
registro 1
activacin de fallos, 500,
configuracin general, 498
registro 2
activacin de fallos, 501
configuracin general, 498
registro de ajuste de fallo
corriente de tierra, 496
registro de comandos
salidas lgicas, 419, 508, 515
registro de desequilibrio de fases, 490
registro de estado
lgica personalizada, 511
registros de prioridad alta
mirroring, 419
registros de prioridad alta de mirroring, 419
registros de uso general de las funciones l-
gicas, 511
reinicio automtico-
activo, 484
ajuste intentos grupo 1, 502, 589
ajuste intentos grupo 2, 502, 589
ajuste intentos grupo 3, 502, 589
nmero de fallos, 473
tiempo sobrepasado de grupo 1, 502,
589
tiempo sobrepasado de grupo 2, 502,
589
tiempo sobrepasado de grupo 3, 502,
589
reloj interno, 570
remitente
tramas Ethernet II admitido, 493
tramas Ethernet II configurado, 493
tramas Ethernet II operativo, 493
reset to defaults, 391
S
segundo paso
lgica personalizada, 511
self test, 397
sensor de temperatura del motor, 130
sensor de temperatura del motor -
umbral de advertencia en grados, 550
sensor de temperatura del motor en grados
n-0, 543
sensor de temperatura del motor-
umbral de advertencia en grados, 496,
592
umbral de fallo en grados, 496, 550, 592
servicios
Ethernet disponibles, 491
sistema
fallo, 350
marcha, 350
sistema-
activado, 484, 513, 530
advertencia, 484, 513, 530
disparado, 484, 513
fallo, 484, 513, 530
listo, 484, 513, 530
sistema-listo, 81
Index
672 1639505 06/2009
SNMP, 435
sobrecarga trmica, 91
activacin de advertencia, 91
activacin de fallo, 91
ajuste, 496
fallo-modo de reinicio, 231
modo, 91
nmero de advertencias, 71
trmica inversa, 92
tiempo definido, 99
tiempo hasta el disparo, 65
sobrecarga trmica -
activacin de advertencia, 358, 500, 550,
591
activacin de fallo, 358, 500, 550, 591
advertencia, 96, 487, 539
fallo, 96, 482, 539
fallos-nmero, 71
modo, 496
nmero de advertencias, 96, 100, 363,
473
nmero de fallos, 96, 100, 363, 473, 539
tiempo sobrepasado de reinicio tras fallo,
232
tiempo sobrepasado definitivo de fallo,
101, 358, 496, 550, 591
umbral de advertencia, 96, 101, 358,
499, 550, 591
umbral de rearme tras fallo, 591
umbral de reinicio tras fallo, 96, 232, 358,
499, 550
sobrecorriente, 120
activacin de advertencia, 121
activacin de fallo, 121
tiempo sobrepasado de fallo, 121
umbral de advertencia, 121
umbral de fallo, 121
sobrecorriente-
activacin de advertencia, 359, 501, 553,
595
advertencia, 487, 539
fallo, 483, 539
nmero de fallos, 71, 474, 539
tiempo sobrepasado de fallo, 359, 496,
553, 595
umbral de advertencia, 359, 496, 553,
595
umbral de fallo, 359, 496, 553, 595
sobreintensidad-
activacin de fallo, 359, 501, 553, 595
sobretensin, 156
sobretensin-
activacin de advertencia, 157, 360, 501,
555, 597, 597
activacin de fallo, 157, 360, 501, 555,
597
advertencia, 487, 540
fallo, 483, 540
nmero de fallos, 71, 363, 474, 540
tiempo sobrepasado de fallo, 157, 360,
497, 597
umbral de advertencia, 157, 360, 497,
597
umbral de fallo, 157, 360, 497
software de configuracin
encendido, 377
funciones de configuracin, 391
instalacin, 373
ventana Quick Watch, 394
software de programacin XBT L1000 de
Magelis
archivos de la aplicacin de software,
330
instalar, 329
transferencia de archivos, 331
software PowerSuite
comandos de control, 397
gestin de fallos, 395
interfaz de usuario, 374
medir y supervisar, 392
navegacin, 375
rama Settings, 376
supervisar fallos, 395
suma de comprobacin de configuracin, 61
suma de datos
FDR, 494
supervisin de sistemas y dispositivos
fallos, 52
Index
1639505 06/2009 673
sustitucin
controlador LTM R, 571
mdulo de expansin, 571
sustitucin de dispositivo defectuoso, 411
T
tamao de los datos
FDR, 494
teclas de HMI
modo de funcionamiento de 2 sentidos
de marcha, 216
modo de funcionamiento de dos tiempos,
222
modo de funcionamiento de dos veloci-
dades, 227
modo de funcionamiento de sobrecarga,
209
modo de funcionamiento independiente,
212
tensin
L1-L2, 45, 354, 488
L2-L3, 45, 354, 488
L3-L1, 45, 354, 488
media, 47, 354, 488
tensin L1-L2, 74
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tensin L1-L2-
desequilibrio superior, 490
tensin L1L2-
n-0, 543
tensin L2-L3, 74
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tensin L2-L3-
desequilibrio superior, 490
tensin L2L3-
n-0, 543
tensin L3-L1, 74
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tensin L3-L1-
desequilibrio superior, 490
tensin L3L1-
n-0, 543
tensin media, 47, 74, 532
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tensin media-
n-0, 543
tensin-
activacin de advertencia de desequili-
brio de fases, 501, 555
activacin de advertencia de prdida de
fase, 501, 555
activacin de fallo de desequilibrio de fa-
ses, 501, 555
activacin de fallo de inversin de fase,
501, 555
activacin de fallo de prdida de fase,
501, 555
advertencia de desequilibrio de fases,
487, 540
advertencia de inversin de fase, 540
advertencia de prdida de fase, 487, 540
desequilibrio de fases, 354, 488
fallo de desequilibrio de fases, 483, 540
fallo de inversin de fase, 483, 540
fallo de prdida de fase, 483, 540
n-0 desequilibrio de fases, 543
nmero de fallos de desequilibrio de fa-
ses, 474, 540
nmero de fallos de prdida de fase, 474,
540
tiempo sobrepasado de fallo de desequi-
librio de fases en arranque, 496, 555
Index
674 1639505 06/2009
tiempo sobrepasado de fallo de desequi-
librio de fases en marcha, 496, 555
tiempo sobrepasado de fallo de prdida
de fase, 497, 555
umbral de advertencia de desequilibrio
de fases, 497, 555
umbral de fallo de desequilibrio de fases,
497, 555
tensin-activacin
fallo de inversin de fases, 152
fallo de prdida de fase, 150
tensin-activacin de advertencia
desequilibrio de fases, 148, 360
prdida de fase, 150, 360
tensin-activacin de advertencia de
desequilibrio de fases, 596
prdida de fase, 596
tensin-activacin de fallo
desequilibrio de fases, 148, 360
inversin de fase, 360
prdida de fase, 360
tensin-activacin de fallo de
desequilibrio de fases, 596
inversin de fase, 596
prdida de fase, 596
tensin-comienzo de tiempo
sobrepasado para fallo de desequilibrio
de fases, 596
tensin-desequilibrio de fases, 74, 145, 532
n-0, 364, 475
n-1, 365, 476
n-2, 477
n-3, 478
n-4, 479
tensin-nmero de fallos
desequilibrio de fases, 71, 363
inversin de fase, 71, 110, 152
prdida de fase, 71
tensin-tiempo
sobrepasado de fallo de desequilibrio de
fases en arranque, 148
sobrepasado de fallo de desequilibrio de
fases en marcha, 148
tensin-tiempo
sobrepasado para fallo de desequilibrio
de fases en marcha, 596
tensin-tiempo sobrepasado de fallo
desequilibrio de fases en arranque, 360
desequilibrio de fases en marcha, 360
prdida de fase, 150, 360
tensin-tiempo sobrepasado de fallo de
prdida de fase, 596
tensin-umbral de advertencia
desequilibrio de fases, 148, 360
tensin-umbral de advertencia de
desequilibrio de fases, 596
tensin-umbral de fallo
desequilibrio de fases, 148, 360
tensin-umbral de fallo de
desequilibrio de fases, 596
TeSys T
sistema de gestin de motores, 16
tiempo de funcionamiento, 79, 363, 473, 546
tiempo hasta el disparo, 65, 354, 490, 530
tierra
corriente, 532
tramas
Ethernet II admitidas, 493
Ethernet II configuradas, 493
Ethernet II operativas, 493
transferencia de archivos
LTM R a PC, 378
LTM R a servidor FDR, 379
PC a LTM R, 378
servidor FDR a LTM R, 379
U
uso, 317
programar el XBTN410 de Magelis, 328
utilizar
controlador LTM R solamente, 318
V
validez de servicios
Ethernet, 492
ventana Quick Watch, 394
visualizacin en HMI - sensor de temperatu-
ra en grados CF, 44, 504
Index
1639505 06/2009 675
X
XBTN410 de Magelis
programar, 328
XBTN410 de Magelis (1 a varios), 332
comando de escritura de valores, 345
comandos de servicio, 371
descripcin fsica, 333
descripcin general de la estructura de
mens, 347
desplazarse por la estructura de mens,
339
editar valores, 341
estructura de mens - nivel 2, 349
gestin de fallos, 369
LCD, 334
lneas de comandos, 337
pgina Ajustes, 355
pgina Controlador, 353
pgina Corr Controlador, 349
pgina Estado Controlador, 350
pgina Histricos, 363
pgina ID De Producto, 366
pgina Inicio, 348
pgina Referencia XBTN, 352
pgina Reini a Dist, 351
pgina Reiniciar a Predet, 352
supervisin, 367
teclado, 333
ndice
676 1639505 06/2009
Vous aimerez peut-être aussi
- Programacion Schneider Modulo LTMRDocument430 pagesProgramacion Schneider Modulo LTMRkarnakesPas encore d'évaluation
- Prosonic FMU 90 EspañolDocument140 pagesProsonic FMU 90 EspañolHéctor José Muñoz Roca100% (2)
- Guía de Mantenimiento Masterpact MTZDocument58 pagesGuía de Mantenimiento Masterpact MTZamado5389100% (1)
- Manual de Uso IQ Valvula MotorizadaDocument92 pagesManual de Uso IQ Valvula MotorizadaGARC SAS100% (1)
- Comunicación Fieldbus FoundationDocument110 pagesComunicación Fieldbus FoundationDanielMartinezVanCamps100% (1)
- E+H CALIBRACIÓN Densímetro GammapilotDocument17 pagesE+H CALIBRACIÓN Densímetro GammapilotAlejandro GuerraPas encore d'évaluation
- Power Flex 700Document238 pagesPower Flex 700Jonathan Mondragon100% (2)
- Comunicación Profibus s7300 y Variad 420Document11 pagesComunicación Profibus s7300 y Variad 420German PovedaPas encore d'évaluation
- Manual de Instrucciones Promag W 400 Hart PDFDocument192 pagesManual de Instrucciones Promag W 400 Hart PDFMariano MedinaPas encore d'évaluation
- MCD500 ManualDocument79 pagesMCD500 ManualAlberto BoticariPas encore d'évaluation
- Procedimiento de Configuracion Del CCM Final E3 Plus RockwellDocument30 pagesProcedimiento de Configuracion Del CCM Final E3 Plus RockwellKamal Arreaza100% (3)
- ALLEN BRADLEY - Variador Velocidad - 7000 - Manual PDFDocument510 pagesALLEN BRADLEY - Variador Velocidad - 7000 - Manual PDFvamadi04Pas encore d'évaluation
- Decanter BCC Parameters and Alarms Spanish (Spain) R3Document32 pagesDecanter BCC Parameters and Alarms Spanish (Spain) R3jhonnymlf0% (1)
- Normas ISADocument48 pagesNormas ISAEymi Gianella Layza EscobarPas encore d'évaluation
- Ramsey Micro-Tech 9100 - 9200 User Manual SpanishDocument108 pagesRamsey Micro-Tech 9100 - 9200 User Manual Spanishadrianahouki100% (3)
- Densimetro OhmartDocument84 pagesDensimetro OhmartCapacitacion Todocat100% (1)
- Guia Rapida TeSys T ProfibusDocument32 pagesGuia Rapida TeSys T ProfibusRodolfoTibuPas encore d'évaluation
- Acs800 07Document154 pagesAcs800 07geromero1Pas encore d'évaluation
- Prosonic M Fmu40Document46 pagesProsonic M Fmu40Billy ZununPas encore d'évaluation
- Transmisor de Temperatura PDFDocument44 pagesTransmisor de Temperatura PDFCalixto TorresPas encore d'évaluation
- Temperatura RosemourtDocument34 pagesTemperatura RosemourtMijail David Felix NarvaezPas encore d'évaluation
- Manual Indra Drive FCDocument236 pagesManual Indra Drive FCJuan Carlos Lillo RochaPas encore d'évaluation
- Siprotec 5 Catálogo - EsDocument469 pagesSiprotec 5 Catálogo - EsAlvaro Jimenez100% (1)
- Instrumentacion Industrial PandIDDocument129 pagesInstrumentacion Industrial PandIDJuan AriasPas encore d'évaluation
- Cuaderno de Evaluación Mantenedor Instrumentista EspecialistaDocument114 pagesCuaderno de Evaluación Mantenedor Instrumentista EspecialistaMichael Angelo Toledo JofrePas encore d'évaluation
- Curso ISA Fieldbus Foundation Agosto 2016Document226 pagesCurso ISA Fieldbus Foundation Agosto 2016Edgar Maya PerezPas encore d'évaluation
- Restauradores NulecDocument20 pagesRestauradores NulecEduardo Burquiza100% (1)
- Rele de Distancia D60 General ElectricDocument25 pagesRele de Distancia D60 General ElectricClaudio Gonzalez DiazPas encore d'évaluation
- AUTEST - Variador de Frecuencia - SINAMIC V20 - SIEMENSDocument12 pagesAUTEST - Variador de Frecuencia - SINAMIC V20 - SIEMENSEdgar BalantaPas encore d'évaluation
- Masterpact Mantenimiento PDFDocument68 pagesMasterpact Mantenimiento PDFcarlos manriquePas encore d'évaluation
- Manual Usuario Micrologic Schneider PDFDocument63 pagesManual Usuario Micrologic Schneider PDFElias Ulises Manriquez Fuentealba100% (2)
- User Guide Ams Trex Device Communicator Es 5116442 PDFDocument212 pagesUser Guide Ams Trex Device Communicator Es 5116442 PDFLUIS FELIPE LIZCANO MARINPas encore d'évaluation
- POSGI-49 Procedimiento de Prueba HI-POT Rev 0Document23 pagesPOSGI-49 Procedimiento de Prueba HI-POT Rev 0hector_msPas encore d'évaluation
- Presentación Sepam (Modificado 21-05-07)Document92 pagesPresentación Sepam (Modificado 21-05-07)Miguel Angel Montaner OssesPas encore d'évaluation
- 15 Filosofía de ControlDocument8 pages15 Filosofía de ControlAlberto Jose Aular Quero100% (1)
- Configuracion Rele Multilin 469Document51 pagesConfiguracion Rele Multilin 469Rubi Copara100% (4)
- Transmisor de Conductividad Liquine M-CM42 Parte 2 Español PDFDocument40 pagesTransmisor de Conductividad Liquine M-CM42 Parte 2 Español PDFcamiloPas encore d'évaluation
- Guía Metodológica para Pruebas de Relés de ProtecciónDocument139 pagesGuía Metodológica para Pruebas de Relés de Protecciónnnyro2402Pas encore d'évaluation
- Presentacion Tecnica Umc100 Completa PDFDocument56 pagesPresentacion Tecnica Umc100 Completa PDFARNOLD JIMMYPas encore d'évaluation
- Instructivo Contraste de Instrumento de MediciónDocument7 pagesInstructivo Contraste de Instrumento de MediciónEnri113Pas encore d'évaluation
- 1401 ID 0 MEM ELE 03 Filosofía de ControlDocument24 pages1401 ID 0 MEM ELE 03 Filosofía de Controlcristhianc4claudioPas encore d'évaluation
- Curso Básico Capacitación Actuadores MX-A Limitorque 2.1Document54 pagesCurso Básico Capacitación Actuadores MX-A Limitorque 2.1Pedro Espinoza83% (6)
- Guia Siprotec 5Document19 pagesGuia Siprotec 5cristhian alexander hurtado melgar100% (1)
- Es Acs880 FW Manual P A5Document628 pagesEs Acs880 FW Manual P A5juan montufarPas encore d'évaluation
- P555-E-ET-017 REV-A Especificacion Tecnica Partidores Suaves MTDocument29 pagesP555-E-ET-017 REV-A Especificacion Tecnica Partidores Suaves MTMiguel MoyaPas encore d'évaluation
- CPC 100 PTM User Manual ESPDocument259 pagesCPC 100 PTM User Manual ESPMFOBLLLLLLLPas encore d'évaluation
- Instalacion DeltavDocument24 pagesInstalacion DeltavTirado Melchor Angel Miguel75% (4)
- Manual VDF Abb Acs580-01 Drives HW C A5Document218 pagesManual VDF Abb Acs580-01 Drives HW C A5Morro DelArrabal100% (2)
- Tesis Diseno y Puesta en Marcha de Aplicacion Scada PDFDocument190 pagesTesis Diseno y Puesta en Marcha de Aplicacion Scada PDFJhoy YumizacaPas encore d'évaluation
- CVM 390927 12 00Document1 pageCVM 390927 12 00NEDZAD BAJRO JUNUZOVIC MARINPas encore d'évaluation
- Manual de Usuario TeSysT - Profibus ESPDocument600 pagesManual de Usuario TeSysT - Profibus ESProdrigo_7_8Pas encore d'évaluation
- Manual - Modbus ESPAÑOL PDFDocument606 pagesManual - Modbus ESPAÑOL PDFjavier gutierrez pizaPas encore d'évaluation
- EsDocument496 pagesEsフォッケル パベル ホスセフPas encore d'évaluation
- Variadores DANFOSS PDFDocument172 pagesVariadores DANFOSS PDFAhuactzin666100% (1)
- Cosas Que Merece La Pena Saber Sobre Convertidores de FrecuenciaDocument172 pagesCosas Que Merece La Pena Saber Sobre Convertidores de FrecuenciaFelipe El-HermosoPas encore d'évaluation
- Tesyst para TDFDocument408 pagesTesyst para TDFDenis Beteta PachecoPas encore d'évaluation
- 750 rm002 - Es PDocument432 pages750 rm002 - Es PjgutierrezpPas encore d'évaluation
- SiS33-201 EXTRANET tcm135-42235Document262 pagesSiS33-201 EXTRANET tcm135-42235Ricardo Molina SánchezPas encore d'évaluation
- SIS0007 BOOK72 tcm135-42228Document228 pagesSIS0007 BOOK72 tcm135-42228Ricardo Molina Sánchez100% (1)
- Inyeccion Diesel Edc M (S) 5-D2842 Le 6..Document70 pagesInyeccion Diesel Edc M (S) 5-D2842 Le 6..Mayin NavaPas encore d'évaluation
- Literatura China - Manual Buda Del ZenDocument88 pagesLiteratura China - Manual Buda Del ZenRodrigo100% (2)
- Manual VijeoDocument22 pagesManual VijeoRamiro UrivalPas encore d'évaluation
- Cilindros Hidráulicos y NeumáticosDocument7 pagesCilindros Hidráulicos y NeumáticosAntonio Jesus Jaen Lopez100% (5)
- La Sabiduria Tolteca deDocument66 pagesLa Sabiduria Tolteca demusicoss21100% (4)
- Espiritualidad Nativa de Las AméricasDocument103 pagesEspiritualidad Nativa de Las AméricasclowndioPas encore d'évaluation
- T12 Cilindros OkDocument50 pagesT12 Cilindros OkpauljacomePas encore d'évaluation
- Amplificador de Audio 40 WDocument8 pagesAmplificador de Audio 40 WAngel Pérez SantiagoPas encore d'évaluation
- Curso PNLDocument50 pagesCurso PNLRamiro Urival100% (2)
- El Prisma de Lira - Lyssa RoyalDocument45 pagesEl Prisma de Lira - Lyssa Royalanon-92463689% (9)
- Calderas PDFDocument39 pagesCalderas PDFDavid Merayo FernándezPas encore d'évaluation
- Dieta Disociada de Suzanne PowellDocument5 pagesDieta Disociada de Suzanne Powelldavichico30100% (3)
- Tu MismoDocument1 pageTu MismoRamiro UrivalPas encore d'évaluation
- Administración de ProyectosDocument6 pagesAdministración de ProyectosRamiro UrivalPas encore d'évaluation
- Anecdotas de PilotosDocument10 pagesAnecdotas de PilotosGustavo RoigPas encore d'évaluation
- Tipos de Procesos ProductivosDocument2 pagesTipos de Procesos ProductivosJenny AguirrePas encore d'évaluation
- Estructuras Sandwich - 2019Document46 pagesEstructuras Sandwich - 2019Lautaro LibertchukPas encore d'évaluation
- Farmacopéa - Razonada - Ó - Tratado - de - Farmaneulagia QuimicaDocument407 pagesFarmacopéa - Razonada - Ó - Tratado - de - Farmaneulagia Quimicapedro deazturiaPas encore d'évaluation
- Identificacion de Montaje HidráulicoDocument4 pagesIdentificacion de Montaje HidráulicochachincinPas encore d'évaluation
- Trabajo de Química GeneralDocument11 pagesTrabajo de Química GeneralRuiz Ojeda RositaPas encore d'évaluation
- Saneamiento MontevideoDocument93 pagesSaneamiento MontevideoTabaré CianciaruloPas encore d'évaluation
- Actividad 4Document3 pagesActividad 4Eduardo RamirezPas encore d'évaluation
- 15 Estudio Del SueloDocument92 pages15 Estudio Del SueloAbsalon Huincho RamosPas encore d'évaluation
- Arte 1 PDFDocument66 pagesArte 1 PDFGermaín SuárezPas encore d'évaluation
- Procedimiento para Trabajos en Espacio Confinado HG&FDocument10 pagesProcedimiento para Trabajos en Espacio Confinado HG&FFla Yáñez LiendroPas encore d'évaluation
- Informe de BombasDocument2 pagesInforme de BombasabelPas encore d'évaluation
- Regeneracion de Columnas PresentacionDocument19 pagesRegeneracion de Columnas PresentacionSilvia MolinaPas encore d'évaluation
- Definición de Aplicaciones de VectoresDocument3 pagesDefinición de Aplicaciones de VectoresAnonymous yhvdarPas encore d'évaluation
- Alu 74181Document9 pagesAlu 74181Franck JonhsonPas encore d'évaluation
- Costeo Basado en Actividades - Ejemplo de CalaverasDocument21 pagesCosteo Basado en Actividades - Ejemplo de CalaverasRuth Mery Ccahuantico CasaPas encore d'évaluation
- Ejercicios TermodinamicaDocument9 pagesEjercicios TermodinamicaREYNA ISABEL RAMOS HINOSTROZAPas encore d'évaluation
- Chicharron de PrensaDocument19 pagesChicharron de PrensaRay SeminarioPas encore d'évaluation
- EC 201 V.0.1empates Tuberia AcueductoDocument4 pagesEC 201 V.0.1empates Tuberia AcueductoJessica BrownPas encore d'évaluation
- Balance de LíneasDocument9 pagesBalance de LíneasGreeven CarvajalPas encore d'évaluation
- CHARLA DE INDUCCIÓN - Uso de EPPDocument44 pagesCHARLA DE INDUCCIÓN - Uso de EPPDanny O. Lazaro Haro0% (1)
- Ejemplo Test Razonamiento MecánicoDocument13 pagesEjemplo Test Razonamiento MecánicoAl Lop100% (2)
- Montero Juan 2016Document93 pagesMontero Juan 2016andrea garciaPas encore d'évaluation
- Informe de Topografia Tambobamba Con AnexosDocument92 pagesInforme de Topografia Tambobamba Con Anexoslucho champi quispePas encore d'évaluation
- Introducción A Las Sustancias PeligrosasDocument34 pagesIntroducción A Las Sustancias PeligrosasINFORMES HSE INTRAMAQPas encore d'évaluation
- EngranajesDocument16 pagesEngranajesDiego IgnacioPas encore d'évaluation
- Catalogo Carp - Qrubber 2016 PDFDocument27 pagesCatalogo Carp - Qrubber 2016 PDFSujei Quiliche ArnaoPas encore d'évaluation
- Curso 6822ADocument512 pagesCurso 6822AJuan Miguel Mendoza PerezPas encore d'évaluation
- Ficha Calentador Estanco Cpe T Low Nox CointraDocument2 pagesFicha Calentador Estanco Cpe T Low Nox CointraSandra CubiPas encore d'évaluation