Vous aimerez peut-être aussi
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDocument7 pagesDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniPas encore d'évaluation
- Small Signal Discrete Time Modeling of Digitally Controlled PWM Converters (Cited 111)Document5 pagesSmall Signal Discrete Time Modeling of Digitally Controlled PWM Converters (Cited 111)delianchenPas encore d'évaluation
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDocument7 pagesA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALPas encore d'évaluation
- Fast-Predictive Optimal Control of NPC Multilevel ConvertersDocument9 pagesFast-Predictive Optimal Control of NPC Multilevel Converterskanda71Pas encore d'évaluation
- Universal Digital Controller For Boost CCM Power Factor Correction Stages Based On Current Rebuilding ConceptDocument12 pagesUniversal Digital Controller For Boost CCM Power Factor Correction Stages Based On Current Rebuilding ConceptsindhukamitkarPas encore d'évaluation
- Numerical Oscillations in EMTP PDFDocument4 pagesNumerical Oscillations in EMTP PDFCarlos Lino Rojas AgüeroPas encore d'évaluation
- Unified Model of PWM Switch Including Inductor in DCM (0074 1Document2 pagesUnified Model of PWM Switch Including Inductor in DCM (0074 1Jesús MendozaPas encore d'évaluation
- The Use of Finite Element Analysis in The Calculation of Leakage Flux and Dielectric Stress DistributionsDocument35 pagesThe Use of Finite Element Analysis in The Calculation of Leakage Flux and Dielectric Stress DistributionsJeans GonzalezPas encore d'évaluation
- Non-Linear Controller Applied To Boost DC-DC ConvertersDocument8 pagesNon-Linear Controller Applied To Boost DC-DC ConvertersC_hakan_CPas encore d'évaluation
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipePas encore d'évaluation
- A Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsDocument10 pagesA Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsjeffguitarPas encore d'évaluation
- Model and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesDocument5 pagesModel and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesRavindranath NaikPas encore d'évaluation
- 05609963Document4 pages05609963Ravi KumarPas encore d'évaluation
- Speed-Power-Accuracy TradeoffDocument8 pagesSpeed-Power-Accuracy TradeoffbackspaceTABPas encore d'évaluation
- Variable Frequency Digital PWM Control For Low-Power Buck ConvertersDocument5 pagesVariable Frequency Digital PWM Control For Low-Power Buck Convertersantonytechno100% (1)
- A High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersDocument4 pagesA High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersJessyPas encore d'évaluation
- DC Motor Speed Control ThesisDocument5 pagesDC Motor Speed Control Thesisafloziubadtypc100% (1)
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsAshok KumarPas encore d'évaluation
- ps5 Thermal GuideDocument6 pagesps5 Thermal GuideSundaramPas encore d'évaluation
- Is Your Mesh Refined Enough? Estimating Discretization Error Using GCIDocument0 pageIs Your Mesh Refined Enough? Estimating Discretization Error Using GCIAntonio Martín AlcántaraPas encore d'évaluation
- Low Power 1.8V 0.18μm CMOS SAR ADCDocument5 pagesLow Power 1.8V 0.18μm CMOS SAR ADCMiguel BrunoPas encore d'évaluation
- System Identification Algorithm For Systems With Interval CoefficientsDocument8 pagesSystem Identification Algorithm For Systems With Interval Coefficientseetn1100% (1)
- ST97Document7 pagesST97dalcdalcPas encore d'évaluation
- Student Name Ali Abdullah Mohammed Ameen: Class 3 BDocument13 pagesStudent Name Ali Abdullah Mohammed Ameen: Class 3 Bالزهور لخدمات الانترنيتPas encore d'évaluation
- A Novel Current-Tracking Method For Active Filters Based On A Sinusoidal Internal ModelDocument8 pagesA Novel Current-Tracking Method For Active Filters Based On A Sinusoidal Internal ModellestherroquePas encore d'évaluation
- Low-Power CMOS Image Sensor Based On Column-Parallel Single-Slope/SAR Quantization SchemeDocument6 pagesLow-Power CMOS Image Sensor Based On Column-Parallel Single-Slope/SAR Quantization SchemeRaghul RamasamyPas encore d'évaluation
- Engineering Journal Software Based Reconfiguration For The Cascaded H-Bridge Multilevel ConverterDocument8 pagesEngineering Journal Software Based Reconfiguration For The Cascaded H-Bridge Multilevel ConverterEngineering JournalPas encore d'évaluation
- Simulink Behavioral Modeling of A 10-Bit Pipelined ADCDocument9 pagesSimulink Behavioral Modeling of A 10-Bit Pipelined ADCbhasin_hemantPas encore d'évaluation
- Commutation Failure Analysis in HVDC Systems Using Advanced Multiple-Run MethodsDocument5 pagesCommutation Failure Analysis in HVDC Systems Using Advanced Multiple-Run MethodsAishwaryNigamPas encore d'évaluation
- Design Power and Controller For DC-DC Converter Systems Using PSPICEDocument6 pagesDesign Power and Controller For DC-DC Converter Systems Using PSPICEsandeepbabu28Pas encore d'évaluation
- Application of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemDocument5 pagesApplication of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemRaghava KatreepalliPas encore d'évaluation
- USC PESC04 PHIL Power Interface Final PDFDocument5 pagesUSC PESC04 PHIL Power Interface Final PDFMalik MilakPas encore d'évaluation
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsskrtamilPas encore d'évaluation
- APEC UploadDocument5 pagesAPEC UploadDulal MannaPas encore d'évaluation
- A New Algorithm To Determine The Magnitudes of DC Voltage Sources in Asymmetric Cascaded Multilevel Converters Capable of Using Charge Balance Control MethodsDocument6 pagesA New Algorithm To Determine The Magnitudes of DC Voltage Sources in Asymmetric Cascaded Multilevel Converters Capable of Using Charge Balance Control MethodsUmair AliPas encore d'évaluation
- Homogeneous Interior Point Method For Constrained Power SchedulingDocument6 pagesHomogeneous Interior Point Method For Constrained Power SchedulingHarish KolliPas encore d'évaluation
- A Unified Method For Modeling and Simulation of Three Phase Induction Motor DrivesDocument5 pagesA Unified Method For Modeling and Simulation of Three Phase Induction Motor Drivesdhirajbharat20Pas encore d'évaluation
- Three Phase PWM Rectifier ThesisDocument7 pagesThree Phase PWM Rectifier Thesisalanacartwrightnorman100% (2)
- Systematic Design of A 200 MSs 8-Bit Interpolating AD ConverterDocument5 pagesSystematic Design of A 200 MSs 8-Bit Interpolating AD ConverterThanos van RamPas encore d'évaluation
- Dialnet FlujoDePotenciaOptimoDeRamasParaRedesDCConEstructu 8358183Document22 pagesDialnet FlujoDePotenciaOptimoDeRamasParaRedesDCConEstructu 8358183john2000carvajalPas encore d'évaluation
- Dyn Sim ModelDocument5 pagesDyn Sim ModelJojo KawayPas encore d'évaluation
- Buck BoostDocument6 pagesBuck BoostAngel MarianoPas encore d'évaluation
- 03ISCIT Opamp Paper v3 PDFDocument4 pages03ISCIT Opamp Paper v3 PDFbiswajitntpcPas encore d'évaluation
- A Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andDocument6 pagesA Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andShiviAroraPas encore d'évaluation
- Buck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFDocument13 pagesBuck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFTariq KhanPas encore d'évaluation
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaPas encore d'évaluation
- Geometric Programming Based Power-Delay Optimization Using Transistor-Sizing For Submicron and Deep Submicron CMOS InverterDocument4 pagesGeometric Programming Based Power-Delay Optimization Using Transistor-Sizing For Submicron and Deep Submicron CMOS Invertersuchi87Pas encore d'évaluation
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992Pas encore d'évaluation
- AnalogDocument8 pagesAnalogAhmed F RahimPas encore d'évaluation
- Discrete-Event Simulation: Figure 1.3: Simple Digital Logic CircuitDocument8 pagesDiscrete-Event Simulation: Figure 1.3: Simple Digital Logic CircuitkingkabhiPas encore d'évaluation
- Microelectronics Journal: Shuo Yang, Jun Cheng, Pei WangDocument8 pagesMicroelectronics Journal: Shuo Yang, Jun Cheng, Pei WangShylu SamPas encore d'évaluation
- Research Article: DC Motor Parameter Identification Using Speed Step ResponsesDocument5 pagesResearch Article: DC Motor Parameter Identification Using Speed Step ResponsesDawn VargasPas encore d'évaluation
- High Speed Numerical Techniques For Transmission Line Protection S D A PickeringDocument4 pagesHigh Speed Numerical Techniques For Transmission Line Protection S D A Pickeringkvasquez1979Pas encore d'évaluation
- Flow Analysis and Calculation of AC/DC Power System Based On MATLAB and PSASPDocument6 pagesFlow Analysis and Calculation of AC/DC Power System Based On MATLAB and PSASPAbdulrahmanPas encore d'évaluation
- Measuring DC Voltage in the Presence of AC SignalsDocument6 pagesMeasuring DC Voltage in the Presence of AC SignalsRangga Kusuma NegaraPas encore d'évaluation
- Modeling and Simulation of Matrix Converter in MatlabDocument5 pagesModeling and Simulation of Matrix Converter in MatlabJisha KuruvillaPas encore d'évaluation
- Power Systems-On-Chip: Practical Aspects of DesignD'EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardPas encore d'évaluation
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesD'EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
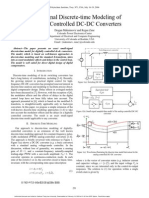
- Small-Signal Discrete-Time Modeling of Digitally Controlled DC-DC ConvertersDocument5 pagesSmall-Signal Discrete-Time Modeling of Digitally Controlled DC-DC ConvertersdelianchenPas encore d'évaluation
- Quantization Resolution and Limit Cycling in Digitally Controlled PWM ConvertersDocument8 pagesQuantization Resolution and Limit Cycling in Digitally Controlled PWM ConvertersiMiklaePas encore d'évaluation
- Tas 5706Document63 pagesTas 5706delianchenPas encore d'évaluation
- TPA2001D2 1-W Filterless Stereo Class-D Audio Power AmplifierDocument16 pagesTPA2001D2 1-W Filterless Stereo Class-D Audio Power AmplifierdelianchenPas encore d'évaluation
- Electrical EngineeringDocument11 pagesElectrical EngineeringEdson MilanoPas encore d'évaluation
- Ejee - 2021 - 23.01 - 01Document7 pagesEjee - 2021 - 23.01 - 01Henok AyelePas encore d'évaluation
- AC Inductance and Inductive ReactanceDocument9 pagesAC Inductance and Inductive ReactanceAbdullah Al AsikPas encore d'évaluation
- Rev SPRING SEPARATORDocument8 pagesRev SPRING SEPARATORAswin MPas encore d'évaluation
- 20LB BOND PAPER NOTES FOR SPARK IGNITERSDocument1 page20LB BOND PAPER NOTES FOR SPARK IGNITERSNguyễnBìnhPhươngPas encore d'évaluation
- Government Polytechnic Ragkot Project .Document21 pagesGovernment Polytechnic Ragkot Project .Ravi NakumPas encore d'évaluation
- Q.Peak Duo Xl-G11.3: Enduring High PerformanceDocument2 pagesQ.Peak Duo Xl-G11.3: Enduring High Performancezheljoy datuinPas encore d'évaluation
- PIC18F Naming ConventionDocument1 pagePIC18F Naming ConventionMudasser waqasPas encore d'évaluation
- Serie CE-65 Absolute Rotary EncoderDocument38 pagesSerie CE-65 Absolute Rotary EncoderCarlos DenedPas encore d'évaluation
- Frequency Response of A Single Stage RC Coupled AmplifierDocument26 pagesFrequency Response of A Single Stage RC Coupled AmplifierkanchankonwarPas encore d'évaluation
- Manual For 7750Document232 pagesManual For 7750cooldude_82Pas encore d'évaluation
- Simply Essay: About The Difference Between LCD and LED TVDocument2 pagesSimply Essay: About The Difference Between LCD and LED TVkontooogPas encore d'évaluation
- TB6600 DatasheetDocument33 pagesTB6600 DatasheetDragan ŠašićPas encore d'évaluation
- Battery Calculations For Fire Alarm and Signaling Systems - SFPEDocument3 pagesBattery Calculations For Fire Alarm and Signaling Systems - SFPEUri BabaPas encore d'évaluation
- Substation Filter BankSpecsDocument7 pagesSubstation Filter BankSpecsTudor BostanPas encore d'évaluation
- Impact of Excitation System On Power System StabilityDocument39 pagesImpact of Excitation System On Power System StabilityZafar Bajwa100% (4)
- Hydropower PlantDocument46 pagesHydropower PlantJayno Ben TapungotPas encore d'évaluation
- Chapter 2 TransformerDocument58 pagesChapter 2 Transformerquocdung NguyenPas encore d'évaluation
- OMC-118 - Data Sheet 2Document2 pagesOMC-118 - Data Sheet 2TejaPas encore d'évaluation
- Frm220 HW Manv114Document34 pagesFrm220 HW Manv114German FloresPas encore d'évaluation
- Midi Foot Controller Fcb1010: User ManualDocument17 pagesMidi Foot Controller Fcb1010: User ManualRaga BhavaPas encore d'évaluation
- Siemens (NVH)Document26 pagesSiemens (NVH)AndresPas encore d'évaluation
- BMH Manual V100 enDocument82 pagesBMH Manual V100 ensenaiadaoPas encore d'évaluation
- Catalgogo de Productos AdiDocument194 pagesCatalgogo de Productos AdiGustavoPas encore d'évaluation
- PCS-9830B X Instruction Manual en Domestic General X R1.05Document164 pagesPCS-9830B X Instruction Manual en Domestic General X R1.05Arief Sandy AnggoroPas encore d'évaluation
- UCA TXM Introductory-Final (5-1-19)Document29 pagesUCA TXM Introductory-Final (5-1-19)Miguel barbosa100% (1)
- Instruction & Safety Manual: SIL 3 Relay Output Module With Line and Load Diagnostics DIN-Rail Model D1093SDocument8 pagesInstruction & Safety Manual: SIL 3 Relay Output Module With Line and Load Diagnostics DIN-Rail Model D1093SmbidPas encore d'évaluation
- MAGNETISM AND MATTER Worksheet 2023Document2 pagesMAGNETISM AND MATTER Worksheet 2023Rad BradPas encore d'évaluation
- RV4 65B R5 V2 Product SpecificationDocument5 pagesRV4 65B R5 V2 Product SpecificationMario Alvarez GarciaPas encore d'évaluation
- Signal FilteringDocument4 pagesSignal FilteringAshutoshPas encore d'évaluation