Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pages4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046Pas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Modelling and Fuzzy Control of DC DriveDocument5 pagesModelling and Fuzzy Control of DC Drivedivinelight100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Direct Torque Control of Im With Fuzzy Minimization Torque RippleDocument6 pagesDirect Torque Control of Im With Fuzzy Minimization Torque Ripplesajs201100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocument9 pagesPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 46 Transient Analysis of Grid-Connected Wind Turbines With DFIG After An External Short-CircuiDocument6 pages46 Transient Analysis of Grid-Connected Wind Turbines With DFIG After An External Short-Circuiapi-19508046Pas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Novel Method of Load Compensation Under Unbalanced and Distorted VoltagesDocument8 pagesA Novel Method of Load Compensation Under Unbalanced and Distorted VoltagesBhargav Cho ChweetPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocument9 pagesPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- 19 Analysis and Simulation of A Three Phase Shunt Active Power Filter With PQ Theory Control TDocument105 pages19 Analysis and Simulation of A Three Phase Shunt Active Power Filter With PQ Theory Control Tapi-19508046100% (1)
- Global Institute of Technology: Department of Electrical EngineeringDocument3 pagesGlobal Institute of Technology: Department of Electrical EngineeringDebabrato MukherjeePas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Total Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYDocument4 pagesTotal Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYTRANS SURVEYPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- 96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Document20 pages96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Marco Alejandro Flores BarrazaPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- SOP UT ThicknessDocument12 pagesSOP UT ThicknessPT PUTRA SETIAWAN PRIMAPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Light-Emitting DiodeDocument28 pagesLight-Emitting DiodebinukirubaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Manual Tp-Link Access Point Lobby PDFDocument24 pagesManual Tp-Link Access Point Lobby PDFvladkainPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- WEG Guia de Instalacao pws5610 Quick Guide English PDFDocument1 pageWEG Guia de Instalacao pws5610 Quick Guide English PDFÁgó AttilaPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Fingerprint-Authentication Using BiometricDocument59 pagesFingerprint-Authentication Using BiometricDebashishParidaPas encore d'évaluation
- Modulation and Multiplexing Schemes in Satellite CommunicationsDocument7 pagesModulation and Multiplexing Schemes in Satellite CommunicationsSUNILPas encore d'évaluation
- Seaga Od24 Instruction ManualDocument42 pagesSeaga Od24 Instruction ManualMarco MolinaPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Some BTP TopicsDocument2 pagesSome BTP TopicsAbhayPas encore d'évaluation
- APC Smart-UPS SC BrochureDocument16 pagesAPC Smart-UPS SC BrochurePTR77Pas encore d'évaluation
- 3281 enDocument28 pages3281 enJafarShojaPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Smart HelmetDocument5 pagesSmart HelmetIJARSCT JournalPas encore d'évaluation
- Enviando Denso Mitsubishi l200 Common RailDocument55 pagesEnviando Denso Mitsubishi l200 Common Railisrael machicado calle100% (3)
- Samsung AC Servo System 2009 4Document40 pagesSamsung AC Servo System 2009 4Frank M C100% (1)
- Electrical Earthing Building Services BarchDocument3 pagesElectrical Earthing Building Services BarchSamreen KhanPas encore d'évaluation
- KontolDocument144 pagesKontolAnonymous ssieDC50% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Centurion Configurable Controller Installation and Operations ManualDocument44 pagesCenturion Configurable Controller Installation and Operations ManualAnonymous LfeGI2hMPas encore d'évaluation
- 1 - Manual NA003 M64 Version 01.11.01C - enDocument115 pages1 - Manual NA003 M64 Version 01.11.01C - enelektrocentarPas encore d'évaluation
- A Vision Based Method For Automatic Evaluation of Germination Rate of Rice SeedsDocument3 pagesA Vision Based Method For Automatic Evaluation of Germination Rate of Rice SeedsVedha MuraliPas encore d'évaluation
- DX DiagDocument28 pagesDX DiagAri NurdiansyahPas encore d'évaluation
- A Novel High-Gain DC-DC Converter Applied in Fuel Cell VehiclesDocument13 pagesA Novel High-Gain DC-DC Converter Applied in Fuel Cell Vehiclesrock starPas encore d'évaluation
- Compressor L7044GSI-7045 - 1210Document2 pagesCompressor L7044GSI-7045 - 1210Dedy Chasan Aflah MutoharPas encore d'évaluation
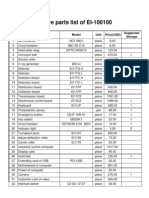
- Ei 100100Document2 pagesEi 100100Tabassum BanuPas encore d'évaluation
- Recent Trends in Retardation FilmsDocument10 pagesRecent Trends in Retardation FilmsJeevan JalliPas encore d'évaluation
- Less or Nonflammable Liquid Insulated TransformersDocument21 pagesLess or Nonflammable Liquid Insulated TransformersTosikur RahmanPas encore d'évaluation
- Resimold Resiglas CRT DryType CommercialBrochure enDocument12 pagesResimold Resiglas CRT DryType CommercialBrochure engreyllom9791Pas encore d'évaluation
- Parallel Operation of Power Transformer: Module-3Document22 pagesParallel Operation of Power Transformer: Module-3sherifmoussaPas encore d'évaluation
- Chapter 09 Particle AcceleratorsDocument32 pagesChapter 09 Particle AcceleratorsSukhmander SinghPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)