Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Tyranny of Edward TufteDocument142 pagesThe Tyranny of Edward TufteGabi Schaffzin67% (6)
- What Is TrustworthinessDocument12 pagesWhat Is Trustworthinesswwccff100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Introduction To Holy Fire III Reiki: by Illiam Ee andDocument17 pagesIntroduction To Holy Fire III Reiki: by Illiam Ee andAlberto100% (1)
- American English vs. British EnglishDocument14 pagesAmerican English vs. British EnglishGermán Calvo MartínezPas encore d'évaluation
- Morph Practice NewDocument4 pagesMorph Practice NewBùi Quang TrânPas encore d'évaluation
- Rudolf Steiner - Cosmosophy Volume I GA 207Document99 pagesRudolf Steiner - Cosmosophy Volume I GA 207Raul Popescu100% (1)
- How To Write A Reflective EssayDocument2 pagesHow To Write A Reflective EssayMeha Raj100% (1)
- Organization Culture and Employee MotivationDocument68 pagesOrganization Culture and Employee MotivationSamuel Davis100% (2)
- Assessment 2 - Designing Teaching and LearningDocument21 pagesAssessment 2 - Designing Teaching and Learningapi-357575377Pas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)ijscPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)Document2 pagesInternational Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)ijscaiPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- ISSN: 2320-7493 (Online) 2320 - 8449 (Print)Document2 pagesISSN: 2320-7493 (Online) 2320 - 8449 (Print)Alejandro CarverPas encore d'évaluation
- IJSCDocument2 pagesIJSCijscPas encore d'évaluation
- IJSCDocument2 pagesIJSCijscPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal of Peer-To-Peer Networks (IJP2P)Document2 pagesInternational Journal of Peer-To-Peer Networks (IJP2P)Aircc KarlonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- International Journal On Soft Computing (IJSC)Document1 pageInternational Journal On Soft Computing (IJSC)Matthew JohnsonPas encore d'évaluation
- QFT Ideas From Google DocsDocument2 pagesQFT Ideas From Google Docsapi-137669263Pas encore d'évaluation
- NatureDocument1 pageNatureDaisy Rose TangonanPas encore d'évaluation
- Lay Denial of Knowledge For Justified True BeliefsDocument10 pagesLay Denial of Knowledge For Justified True BeliefsJuan Camilo Osorio AlcaldePas encore d'évaluation
- Breath Yogananda PDFDocument8 pagesBreath Yogananda PDFIñaki RoldósPas encore d'évaluation
- Research AssignDocument2 pagesResearch AssignKit ViescaPas encore d'évaluation
- Topic Sentence Lesson PlanDocument6 pagesTopic Sentence Lesson Planapi-397089431100% (1)
- Rationale For GiftedDocument5 pagesRationale For Giftedapi-266088524Pas encore d'évaluation
- DST in Psychology PDFDocument3 pagesDST in Psychology PDFwernsicklePas encore d'évaluation
- Qualia: IntrospectionDocument16 pagesQualia: IntrospectionRafael RoaPas encore d'évaluation
- Comprehension Strategies For Reading Historical FictionDocument10 pagesComprehension Strategies For Reading Historical Fictionapi-251249268Pas encore d'évaluation
- Population Vs SampleDocument5 pagesPopulation Vs Sampleronald bantuganPas encore d'évaluation
- Glossary of Words Used in ISO 9000-2015 and ISO 9001-2015Document5 pagesGlossary of Words Used in ISO 9000-2015 and ISO 9001-2015alfredorozalenPas encore d'évaluation
- Pebc Lesson Plan DocumentDocument4 pagesPebc Lesson Plan Documentapi-309521519Pas encore d'évaluation
- Lesson Plan - LANG FOCUS - Unit 15 E11Document13 pagesLesson Plan - LANG FOCUS - Unit 15 E11Ngọc BíchPas encore d'évaluation
- Airbus BBA Candidate Report 11032843Document6 pagesAirbus BBA Candidate Report 11032843Bahareh MaghaniPas encore d'évaluation
- Semi-Supervised Learning Via Regularized Boosting Working On Multiple Semi-Supervised AssumptionsDocument15 pagesSemi-Supervised Learning Via Regularized Boosting Working On Multiple Semi-Supervised AssumptionsDrishti BeoharPas encore d'évaluation
- The Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusDocument6 pagesThe Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusJohn Lloyd TomacaPas encore d'évaluation
- Distributed Situation Awareness in Pilotage Operations: Implications and ChallengesDocument5 pagesDistributed Situation Awareness in Pilotage Operations: Implications and ChallengesHarel Santos RosaciaPas encore d'évaluation
- Conditional Sentences in EnglishDocument3 pagesConditional Sentences in EnglishJorge PinargotePas encore d'évaluation
- The Bremen-Groningen Online Workshops On Multimodality 2020 - 2021Document6 pagesThe Bremen-Groningen Online Workshops On Multimodality 2020 - 2021cecirenniePas encore d'évaluation
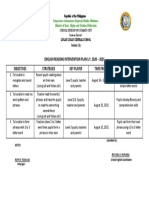
- English Reading Intervention Plan S.Y. 2020 - 2021 Objectives Strategies Key Player Time Frame Expected OutputDocument1 pageEnglish Reading Intervention Plan S.Y. 2020 - 2021 Objectives Strategies Key Player Time Frame Expected OutputMaribel A. BustilloPas encore d'évaluation