IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE)
e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 1 Ver. V (Feb. 2014), PP 07-12
www.iosrjournals.org
www.iosrjournals.org 7 | Page
Speed Control for Four Quadrant Operation of Three Phase Bldc
Motor Using Digital Controller
Aswathy Paul
Student Mtech Power Electronics (EEE Department) Toch Institute of science & Technology
Arakunnam,Kerala,India
Abstract: This paper proposes a method that estimates rotor position by using an unknown input observer over
a full speed range. In this method, a trapezoidal back emf is modeled as an unknown input and the proposed
unknown input observer estimating line to line back emf in real time makes it possible to detect the rotor
position. This observer has high performance even at low speed range because rotor position is calculated
independently of the rotor speed without adding any additional circuit or complicated operation process.
Simulations have been carried out for the verification of proposed control scheme. MAT LAB/SIMULINK model
is used for software simulation.
Keywords-BLDC motor, Four quadrant operation, sensorless control, full speed range, unknown input
observer.
I. Introduction
The bldc motor employs an electronic commutator and the motors reliability and efficiency are
improved by eliminating this source of wear and power loss. BLDC motors offers a number of advantages over
brushed dc motors and induction motors including noiseless operation; higher speed ranges; better speed versus
torque characteristics and faster dynamic response. The BLDC motor is known as synchronous motor because
the magnetic field generated by stator and rotor revolve at the same frequency and the benefit of this
arrangement is that the bldc motor does not experience slip like that of induction motors. The Hall Effect
sensors which are used for rotor position estimation will increase the cost and size of the motor. The Hall Effect
sensors are temperature sensitive, limiting the operation of the motor to below about 75
0
C and could reduce the
system reliability because of the components and wiring. Therefore sensorless control of BLDC motor has been
becoming more popular in recent years due to advantages like cost reduction, reliability improvement,
elimination of difficulty in maintaining sensors etc. The sensorless method of control is highly advantageous if
the motor is operating in dusty or oily environment where occasional cleaning of Hall Effect sensor is required
for proper sensing of rotor position. In the motors rated below one watt rating the power consumption by
position sensors can substantially reduce the motor efficiency. As a result sensorless drives that can control
position, speed and torque without shaft mounted position sensors has been used[3,4].
Conventional sensorless control method can be divided into four categories. First, the open phase
current sensing method[5] which is used for detecting the conducting interval of freewheeling diode connected
in antiparallel with power transistors. This method has the advantage that synchronous process is simple and the
control characteristic has high performance at low speeds. However rotor position resolution conspicuously
decreases at high speeds and for realization of this method, it has the defect that additional isolated power needs
to supply to a comparator for detecting the freewheeling current. Secondly, the method detecting the third
harmonic of back emf [6,7] is a technique to remove all the fundamental and other polyphase components
through a simple summation of three phase voltages. The neutral point that is not considered in the
manufacturing process of motor is needed to measure phase voltages and the third harmonic detection is
difficult at low speed range. Thirdly, the back emf integrating method[8,9] which is a technique
applying the principle that integration is constant from zero crossing point to 30
0
. This method has the drawback
that it does not synchronize the phase current with back emf at the sensorless drive. Finally the open phase
voltage sensing method [10-13] is a technique for estimating the rotor position indirectly by using the zero
crossing point detection of open phases terminal voltage. This method has a deteriorated response at transient
state.
To solve the above problems, this paper proposes a new sensorless control method using an unknown
input observer that is independent of the rotor speed for a brushless dc motor drive and can effectively estimate
a line to line back emf.
II. Modelling Of Bldc Motor
The analysis of brushless dc motor is based on the following assumptions:
- BLDC motor is not saturated
Speed Control for Four Quadrant Operation of Three Phase Bldc Motor Using Digital Controller
www.iosrjournals.org 8 | Page
- Stator resistances are equal
- Self and mutual inductances are constant
- Semiconductor devices of inverter are ideal
- Iron losses are negligible
- Back emf waveforms of all phases are equal
Fig 1 Equivalent circuit of BLDC motor
The dynamic equations of BLDC motors under the above assumptions are derived based on the equivalent
circuit of BLDC motor.
(
(
(
Vc
Vb
Va
=
(
(
(
R
R
R
0 0
0 0
0 0
(
(
(
ic
ib
ia
+
(
(
(
L M M
M L M
M M L
d/dt
(
(
(
ic
ib
ia
+
(
(
(
ec
eb
ea
ia+ ib+ic=0
Mia+Mib+Mic=0
Therefore,
(
(
(
Vc
Vb
Va
=
(
(
(
R
R
R
0 0
0 0
0 0
(
(
(
ic
ib
ia
+
(
(
(
M L
M L
M L
0 0
0 0
0 0
d/dt
(
(
(
ic
ib
ia
+
(
(
(
ec
eb
ea
The trapezoidal back emfs are modeled as a function of rotor position as:
e
a
=K
e
W
m
F
a
(
e
)
e
b
=K
e
W
m
F
b
(
e
-
3
2t
)
e
c
=K
e
W
m
F
c
(
e
+
3
2t
)
T
a
=K
t
i
a
F
a
(
e
)
T
b
=K
t
i
b
F
b
(
e
-
3
2t
)
T
c
=K
t
i
c
F
c
(
e
+
3
2t
)
T
e
=T
a
+T
b
+T
c
The electromagnetic torque can be expressed as:
T
e
= J
2
2
dt
d u
+B
dt
d
m
u
+T
l
e
=P/2
m
;
W
m
=
dt
d
m
u
T
e
= 1/W
m
(e
a
i
a
+e
b
i
b
+e
c
i
c
)
Where
J is the moment of inertia;
B is the frictional coefficient;
W
m
is the angular velocity of the motor;
T
l
is the load torque
T
k
is the electric torque produced by k
th
phase (k=a,b,c)
T
e
is the electric torque produced by BLDC
Speed Control for Four Quadrant Operation of Three Phase Bldc Motor Using Digital Controller
www.iosrjournals.org 9 | Page
K
e
is the back emf constant
K
t
is the torque constant
W
m
is the angular speed of rotor
m
is the mechanical angle of rotor
e
is the electrical angle of rotor
F(
e
) is the back emf reference as function of rotor position
F
a
(
e
)=
( ) ( )
( )
( )
s Z +
s Z
s Z +
s Z
s Z
) 2
6
11
( 12 / 6
)
6
11
6
7
( 1
)
6
7
6
5
( 6 / 6
)
6
5
6
( 1
6
0 / 6
t u
t
u t
t
u
t
t
u
t
u t
t
u
t
t
u u t
F
b
(
e
) and F
c
(
e
) are 120
0
and 240
0
phase shifted with respect to F
a
(
e
).
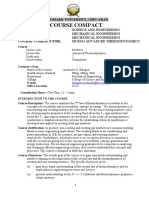
III. Four Quadrant Operation
There are four possible quadrants of operation using a brushless DC motor which is shown in figure 2.
When the brushless DC motor is operating in the first and third quadrant, the supplied voltage is greater than
back emf which is known as forward motoring and reverse motoring modes respectively, but the direction of
current flow differs. When the motor is operating in the second and fourth quadrant, the back emf generated by
motor should be greater than supplied voltage which is forward motoring and reverse motoring modes
respectively and here again the direction of current flow is reversed.
The motor is initially made to rotate in the clockwise direction and when the speed reversal command
is obtained, the control goes into clockwise regeneration mode which brings the rotor to standstill position.
Instead of waiting for exact standstill position, continuous energization of main phase is attempted and this
rapidly slows down the rotor of the machine to standstill position. Therefore there is the necessity of
determining the instant when the rotor is ideally positioned for reversal. Hall Effect sensors are used to obtain
the rotor position and from the hall sensor outputs it is determined whether the machine has reversed its
direction which is the ideal moment for energizing the stator phase so that machine can start motoring in the
counter clockwise direction.
Figure 2 Four quadrants of operation
IV. Proposed System
A new sensorless control method is proposed using an unknown input observer that is independent of
the rotor speed for a brushless dc motor drive and can effectively estimate a line to line back emf. Sensorless
control methods such as back emf detection method show high performance only at high speed because
magnitude of back emf is dependent upon rotor speed. In the proposed system rotor position is estimated by
using an unknown input observer over a full speed range. A trapezoidal back emf is modeled as an unknown
input. The unknown input observer estimating line to line back emf in real time makes it possible to detect the
rotor position. This observer has high performance even at low speed because the rotor position is calculated
independently of rotor speed without an additional circuit or complicated operation process.
In the proposed sensorless control method, rotor position can be detected by using trapezoidal back emf
of BLDC motors. Since the back emf of brushless DC motor is not measured directly, it is measured by using an
unknown input observer which is constructed by a back emf regarded as an unknown input and the state of the
Speed Control for Four Quadrant Operation of Three Phase Bldc Motor Using Digital Controller
www.iosrjournals.org 10 | Page
BLDC motor drive system. The proposed method can determine the motor position within 60
0
motor revolutions
and detects the commutation instance by using commutation functions which are based on the estimated line to
line back emfs with 60
0
resolutions. After detecting the first commutation point, speed and torque can be
controlled with a sensorless algorithm with the estimated speed calculated by time interval of commutation
points.
Whenever there is a reversal of direction of rotation it implies there will be a change in the quadrant.
When the motor is operating in the motoring mode in the clockwise direction, the relay contacts get opened.
When braking is applied or when the speed reversal commands are obtained, the relay contacts get closed. The
kinetic energy which will be wasted as heat energy is now converted into electrical energy which is rectified and
stored in a rechargeable battery. The braking energy is return back to the power source which increases the
complexity of the circuit; the DC power generated has to be inverted to be returned back to the mains.
The frequent reversal in the direction of rotation will result in the continuous charging of battery. When
interruption of power supply occurs, the energy stored in the battery can be used to run the same motor. The
actual speed of the motor is fed back to dsPIC controller and is compared with the reference speed. The
difference in speed generates an error signal and aids the motor to run at constant speed. When brake is applied,
the speed reduces to zero.
Figure 3 shows the overall structure of proposed sensorless drive system. The line to line voltage is
calculated according to the dc link voltage and switching status of the inverter. The back emf observer provides
the estimated line to line back emf. The commutation function, speed and rotor position are calculated using
estimated line to line back emfs. The commutation signal generation block generates commutation signals
according to calculated rotor position and commutation function.
Figure 3 Overall Structure of the Proposed Sensorless Drive System
A. COMMUTATION FUNCTION
The sensorless control method which decides the commutation instances of switching devices by detecting
the zero crossing point of back emf has been commonly used. But this method cannot detect zero crossing point
at low speed range. To solve this problem, sensitive commutation function defined by using line to line back
emf is proposed to improve the performance of sensorless control scheme and the commutation functions are
defined as:
Mode 1 and 4: CF ()
1
= e
bc
^
/e
ca
^
Mode 2 and 5: CF ()
2
= e
ab
^
/e
bc
^
Mode 3 and 6: CF ()
3
= e
ca
^
/ e
ab
^
B. ESTIMATION OF SPEED AND POSITION
If the estimated magnitude of a back emf is defined, the speed and rotor position can be calculated. The
relationship between speed and back emf in BLDC motor is:
E = K
e
W
e
Where
E is the magnitude of back emf;
K
e
is the back emf constant
W
e
is the angular velocity
The magnitude of back emf is estimated by the maximum magnitude of the line to line back emf that the
unknown input observer gives. Therefore speed can be calculated by using estimated magnitude of back emf as:
W
e
^
= E
^
/K
e
;
W
m
^
= 2/P W
e
^
;
where
Speed Control for Four Quadrant Operation of Three Phase Bldc Motor Using Digital Controller
www.iosrjournals.org 11 | Page
W
m
^
is the estimated mechanical angular velocity
P is the number of poles
The rotor position is obtained by integrating the speed of the motor:
^
= W
e
^
dt +
0
Where
0
is the initial rotor position.
Figure 4 Simulink model of proposed system
V. Simulation Results
The closed loop controller for three phase BLDC motor is modeled using MATLAB/ Simulink.
Permanent magnet synchronous machine with trapezoidal back emf is modeled as BLDC motor. Figure 4 shows
the Simulink model of the proposed system. In the proposed system, motor speed and position are estimated
from terminal voltages and currents using back emf observer. In every 60 electrical degrees, commutation
signals equivalent to Hall Effect signals are generated from rotor position. The permanent magnet synchronous
machine with trapezoidal back emf is fed by a PWM voltage source inverter which is built using a universal
bridge block. The speed control loop uses a PI controller to produce torque reference for current control block.
The current control blocks computes three reference motor line currents in phase with the back emfs,
corresponding to torque reference and then feeds the motor with these currents using a three phase current
regulator.
The speed regulation is accomplished with PI controller. The controllers sensitivity is increased by
increasing the proportional gain of the controller thereby faster reaction for small speed regulation errors.
Figure 5 Waveforms of stator current, rotor speed, electromagnetic torque and back emf
Figure 5 shows the waveforms of stator current, rotor speed, electromagnetic torque and back emf. At time t=0
sec, the speed set point is 400 rpm and can observe that speed increases to 400 rpm precisely following the
acceleration ramp. At t= 0.5 sec, full load torque is applied to motor and can observe a small disturbance in
motor speed which stabilizes very quickly. At t= 1 sec, the speed set point is changed to 0 rpm and can observe
that speed decreases down to 0 rpm precisely following the deceleration ramp.
VI. Conclusion
A new approach to sensorless control of BLDC motor drives using an unknown input observer is
proposed. In this method, a trapezoidal back emf is modeled as an unknown input and the unknown input
Speed Control for Four Quadrant Operation of Three Phase Bldc Motor Using Digital Controller
www.iosrjournals.org 12 | Page
observer estimating line to line back emf in real time makes it possible to detect the rotor position. This observer
has high performance at a low speed range because rotor position is calculated independently of the rotor speed
without an additional circuit or complicated operation process.
The sensorless control method using an unknown input observer can
- Be achieved without any additional circuits
- Estimate rotor speed in real time for precise control
- Make commutation pulse even in transient state as well as in steady state
- Detect the rotor position effectively over a full speed range
References
[1] C. Sheeba Joice, S. R. Paranjothi, and V. Jawahar Senthil Kumar, Digital Control Strategy for Four Quadrant Operation of Three
Phase BLDC Motor With Load Variations,, IEEE Transactions On Industrial Informatics, Vol. 9, No. 2, May 2013.
[2] Tae-Sung Kim, Byoung-Gun Park, Dong-Myung Lee, Ji-Su Ryu, and Dong-Seok Hyun, A New Approach to Sensorless Control
Method for Brushless DC Motors, International Journal of Control, Automation, and Systems, vol. 6, no. 4, pp. 477-487, August
2008.
[3] N. Matsui, Sensorless PM brushless DC motor drives, IEEE Trans. on Industrial Electronics, vol. 43, no. 2, pp. 300-308, 1996.
[4] K. Xin, Q. Zhan, and J. Luo, A new simple sensorless control method for switched reluctance motor drives, KIEE J. Electr. Eng.
Technol., vol. 1, no. 1, pp. 52-57, 2006.
[5] S. Ogasawara and H. Akagi, An approach to position sensorless drive for brushless DC motors, IEEE Trans. on Industry
Applications, vol. 27, no. 5, pp. 928-933, 1991.
[6] J. C. Moreira, Indirect sensing for rotor flux position of permanent magnet AC motors operating over a wide speed range, IEEE
Trans. on Industry Applications, vol. 32, no. 6, pp. 1394-1401, 1996.
[7] J. X. Shen, Z. Q. Zhu, and D. Howe, Sensorless flux-weakening control of permanent-magnet brushless machines using third
harmonic back EMF, IEEE Trans. on Industry Applications, vol. 40, no. 6, pp. 1629-1636, 2004.
[8] T. M. Jahns, R. C. Becerra, and M. Ehsani, Integrated current regulation for a brushless ECM drive, IEEE Trans. on Power
Electronics, vol. 6, no. 1, pp. 118-126, 1991.
[9] H. R. Andersen and J. K. Pedersen, Sensorless ELBERFELD control of brushless DC motors for energy-optimized variable-speed
household refrigerators, EPE Conf. Rec., vol. 1, pp. 314- 318, 1997.
[10] G. J. Su and J. W. Mckeever, Low cost sensorless control of brushless DC motors with improved speed range, IEEE Trans. on
Power Electronics, vol. 19, pp. 296-302, 2004.
[11] K. Iizuka, H. Uzuhashi, and M. Kano, Microcomputer control for sensorless brushless motor, IEEE Trans. on Industry
Applications, vol. 27, pp. 595-601, 1985.
[12] H. G. Yee, C. S. Hong, J. Y. Yoo, H. G. Jang, Y. D. Bae, and Y. S. Park, Sensorless drive for interior permanent magnet brushless
DC motors, Proc. of IEEE International Conf. on Electric Machines and Drives, 18-21, pp.TD1/3.1-3.3, 1997.
[13] Q. Jiang, C. Bi, and R. Huang, A new phasedelay- free method to detect back EMF zerocrossing points for sensorless control of
spindle motors, IEEE Trans. Magn., vol. 41, no. 7, pp. 2287-2294, 2005.
Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 230/33Kv Bole Lemi Substation Calculation Note - Protection Relay Setting - 33Kv FeederDocument43 pages230/33Kv Bole Lemi Substation Calculation Note - Protection Relay Setting - 33Kv FeederDebebe TsedekePas encore d'évaluation
- 8 Lightning CalculationDocument75 pages8 Lightning CalculationSamant SauravPas encore d'évaluation
- STEAMcalcDocument3 269 pagesSTEAMcalcneel100% (1)
- Subject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactsDocument26 pagesSubject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactssivakumarsarvananPas encore d'évaluation
- Terminal Markings ConnectionsDocument9 pagesTerminal Markings ConnectionsMuhammad Haris Baig100% (1)
- Youth Entrepreneurship: Opportunities and Challenges in IndiaDocument5 pagesYouth Entrepreneurship: Opportunities and Challenges in IndiaInternational Organization of Scientific Research (IOSR)100% (1)
- Effects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaDocument10 pagesEffects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaInternational Organization of Scientific Research (IOSR)100% (1)
- Effects of Harmonics On Power SystemsDocument6 pagesEffects of Harmonics On Power SystemsLammie Sing Yew LamPas encore d'évaluation
- Otto Cycle ProblemsDocument4 pagesOtto Cycle ProblemsBipulBrahmaPas encore d'évaluation
- Factors Affecting Success of Construction ProjectDocument10 pagesFactors Affecting Success of Construction ProjectInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Enhancing Pupils' Knowledge of Mathematical Concepts Through Game and PoemDocument7 pagesEnhancing Pupils' Knowledge of Mathematical Concepts Through Game and PoemInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Study The Changes in Al-Ahwaz Marshal Using Principal Component Analysis and Classification TechniqueDocument9 pagesStudy The Changes in Al-Ahwaz Marshal Using Principal Component Analysis and Classification TechniqueInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- The Effect of Instructional Methods and Locus of Control On Students' Speaking Ability (An Experimental Study in State Senior High School 01, Cibinong Bogor, West Java)Document11 pagesThe Effect of Instructional Methods and Locus of Control On Students' Speaking Ability (An Experimental Study in State Senior High School 01, Cibinong Bogor, West Java)International Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Philosophical Analysis of The Theories of Punishment in The Context of Nigerian Educational SystemDocument6 pagesPhilosophical Analysis of The Theories of Punishment in The Context of Nigerian Educational SystemInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Students' Perceptions of Grammar Teaching and Learning in English Language Classrooms in LibyaDocument6 pagesStudents' Perceptions of Grammar Teaching and Learning in English Language Classrooms in LibyaInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Necessary Evils of Private Tuition: A Case StudyDocument6 pagesNecessary Evils of Private Tuition: A Case StudyInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Project Based Learning Tools Development On Salt Hydrolysis Materials Through Scientific ApproachDocument5 pagesProject Based Learning Tools Development On Salt Hydrolysis Materials Through Scientific ApproachInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Microencapsulation For Textile FinishingDocument4 pagesMicroencapsulation For Textile FinishingInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Child Mortality Among Teenage Mothers in OJU MetropolisDocument6 pagesChild Mortality Among Teenage Mothers in OJU MetropolisInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Development of Dacum As Identification Technique On Job Competence Based-Curriculum in High Vocational EducationDocument5 pagesDevelopment of Dacum As Identification Technique On Job Competence Based-Curriculum in High Vocational EducationInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Need of Non - Technical Content in Engineering EducationDocument3 pagesNeed of Non - Technical Content in Engineering EducationInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Geohydrological Study of Weathered Basement Aquifers in Oban Massif and Environs Southeastern Nigeria: Using Remote Sensing and Geographic Information System TechniquesDocument14 pagesGeohydrological Study of Weathered Basement Aquifers in Oban Massif and Environs Southeastern Nigeria: Using Remote Sensing and Geographic Information System TechniquesInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Comparison of Psychological Variables Within Different Positions of Players of The State Junior Boys Ball Badminton Players of ManipurDocument4 pagesComparison of Psychological Variables Within Different Positions of Players of The State Junior Boys Ball Badminton Players of ManipurInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Comparison of Selected Anthropometric and Physical Fitness Variables Between Offencive and Defencive Players of Kho-KhoDocument2 pagesComparison of Selected Anthropometric and Physical Fitness Variables Between Offencive and Defencive Players of Kho-KhoInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Comparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockDocument2 pagesComparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Investigation of Wear Loss in Aluminium Silicon Carbide Mica Hybrid Metal Matrix CompositeDocument5 pagesInvestigation of Wear Loss in Aluminium Silicon Carbide Mica Hybrid Metal Matrix CompositeInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Study of Effect of Rotor Speed, Combing-Roll Speed and Type of Recycled Waste On Rotor Yarn Quality Using Response Surface MethodologyDocument9 pagesStudy of Effect of Rotor Speed, Combing-Roll Speed and Type of Recycled Waste On Rotor Yarn Quality Using Response Surface MethodologyInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Lipoproteins and Lipid Peroxidation in Thyroid DisordersDocument6 pagesLipoproteins and Lipid Peroxidation in Thyroid DisordersInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Application of Xylanase Produced by Bacillus Megaterium in Saccharification, Juice Clarification and Oil Extraction From Jatropha Seed KernelDocument8 pagesApplication of Xylanase Produced by Bacillus Megaterium in Saccharification, Juice Clarification and Oil Extraction From Jatropha Seed KernelInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Advancing Statistical Education Using Technology and Mobile DevicesDocument9 pagesAdvancing Statistical Education Using Technology and Mobile DevicesInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Core Components of The Metabolic Syndrome in Nonalcohlic Fatty Liver DiseaseDocument5 pagesCore Components of The Metabolic Syndrome in Nonalcohlic Fatty Liver DiseaseInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Comparative Effect of Daily Administration of Allium Sativum and Allium Cepa Extracts On Alloxan Induced Diabetic RatsDocument6 pagesComparative Effect of Daily Administration of Allium Sativum and Allium Cepa Extracts On Alloxan Induced Diabetic RatsInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- A Review On Refrigerants, and Effects On Global Warming For Making Green EnvironmentDocument4 pagesA Review On Refrigerants, and Effects On Global Warming For Making Green EnvironmentInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Auxin Induced Germination and Plantlet Regeneration Via Rhizome Section Culture in Spiranthes Sinensis (Pers.) Ames: A Vulnerable Medicinal Orchid of Kashmir HimalayaDocument4 pagesAuxin Induced Germination and Plantlet Regeneration Via Rhizome Section Culture in Spiranthes Sinensis (Pers.) Ames: A Vulnerable Medicinal Orchid of Kashmir HimalayaInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Research Analysis On Sustainability Opportunities and Challenges of Bio-Fuels Industry in IndiaDocument7 pagesResearch Analysis On Sustainability Opportunities and Challenges of Bio-Fuels Industry in IndiaInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Parametric Optimization of Single Cylinder Diesel Engine For Specific Fuel Consumption Using Palm Seed Oil As A BlendDocument6 pagesParametric Optimization of Single Cylinder Diesel Engine For Specific Fuel Consumption Using Palm Seed Oil As A BlendInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Kinetic Theory of GasDocument4 pagesKinetic Theory of GasTawhidul AlamPas encore d'évaluation
- LaGrange Method Finds Sphere Terminal VelocityDocument10 pagesLaGrange Method Finds Sphere Terminal Velocityotis-a2Pas encore d'évaluation
- 07 - System of Particles and Rotational MotionDocument20 pages07 - System of Particles and Rotational Motionᴍᴏᴊᴏ JOJOPas encore d'évaluation
- Heating coil-100MTDocument31 pagesHeating coil-100MTHeong Siew LinPas encore d'évaluation
- Sonometer 30: Energy MetersDocument16 pagesSonometer 30: Energy MetersoelbergluisPas encore d'évaluation
- AC Circuits 2 PDFDocument16 pagesAC Circuits 2 PDFlee robert olivar100% (1)
- 4-Cyclones HandoutDocument18 pages4-Cyclones HandoutfatimaPas encore d'évaluation
- Chapter 12 Fun With MagnetsDocument5 pagesChapter 12 Fun With MagnetsbittuchintuPas encore d'évaluation
- (2001) (Sun) (Two-Group Interfacial Area Transport Equation For A Confined Test Section)Document367 pages(2001) (Sun) (Two-Group Interfacial Area Transport Equation For A Confined Test Section)Erol BicerPas encore d'évaluation
- Lecture01 P2 PDFDocument23 pagesLecture01 P2 PDFNguyen Luan100% (1)
- Em 123Document76 pagesEm 123Naresh DamaPas encore d'évaluation
- NAPTIN Graduate Skills Programme BrochureDocument40 pagesNAPTIN Graduate Skills Programme BrochureEngr KushenscottPas encore d'évaluation
- MCE433 Advanced Thermodynamics (HOD-DeAN)Document11 pagesMCE433 Advanced Thermodynamics (HOD-DeAN)KEHINDE BABALOLAPas encore d'évaluation
- Fiche Technique Jinko JKM300 320M 60H V A2 enDocument2 pagesFiche Technique Jinko JKM300 320M 60H V A2 enfarfarfifi3Pas encore d'évaluation
- Guia de Diagramas de Turbina SolarDocument102 pagesGuia de Diagramas de Turbina SolarbillitusPas encore d'évaluation
- BLDC COMPRESSOR TCC DA HORIZONTAL r1.0Document18 pagesBLDC COMPRESSOR TCC DA HORIZONTAL r1.0Bruno Souza100% (2)
- Capacitance Charge Voltage RelationshipDocument9 pagesCapacitance Charge Voltage Relationshiprifu91Pas encore d'évaluation
- Module 3 TorsionDocument8 pagesModule 3 TorsionGeri LazaroPas encore d'évaluation
- Universiti Malaysia Pahang: Faculty of Mechanical EngineeringDocument13 pagesUniversiti Malaysia Pahang: Faculty of Mechanical EngineeringFirdaus IliasPas encore d'évaluation
- Rotating Frames Simulate GravityDocument6 pagesRotating Frames Simulate GravityAyesha SajjadPas encore d'évaluation
- Technical Manual FOR Compact HF SSB N2161: S.P. Radio A/S Aalborg DenmarkDocument29 pagesTechnical Manual FOR Compact HF SSB N2161: S.P. Radio A/S Aalborg DenmarkEstetPas encore d'évaluation
- IJMGE Volume 55 Issue 2 Page 97-107Document11 pagesIJMGE Volume 55 Issue 2 Page 97-107aliPas encore d'évaluation
- U4 Lab 1 Moles Molecules and Grams 3Document4 pagesU4 Lab 1 Moles Molecules and Grams 3api-239474508Pas encore d'évaluation