Vous aimerez peut-être aussi
- Type Support Cable Tray HecDocument5 pagesType Support Cable Tray HecakbarPas encore d'évaluation
- Sagging CalculationDocument4 pagesSagging CalculationheroPas encore d'évaluation
- Boq1 SKTT 150 KV JGC - Kandang SapiDocument4 pagesBoq1 SKTT 150 KV JGC - Kandang SapiDimas Rio100% (1)
- Design Calculations Sheet - 12.75": SL .No. Symbol Value UnitDocument6 pagesDesign Calculations Sheet - 12.75": SL .No. Symbol Value UnitASHOK SWAMIPas encore d'évaluation
- For The Radial Power System Shown in Figure 1.17, ...Document6 pagesFor The Radial Power System Shown in Figure 1.17, ...Ayush Gupta 4-Year B.Tech. Electrical Engineering100% (1)
- Power StudyDocument17 pagesPower StudyKaran SinghPas encore d'évaluation
- RFQ BETA Project 005 Steel StructureDocument8 pagesRFQ BETA Project 005 Steel StructureHendrisman simanjuntakPas encore d'évaluation
- PI734EDocument8 pagesPI734E3efooPas encore d'évaluation
- 3M STOCK LIST - AKBAR TRADING-3M Electrical Materials Promotion - Mail@Document2 pages3M STOCK LIST - AKBAR TRADING-3M Electrical Materials Promotion - Mail@GIBUPas encore d'évaluation
- EE 368 Lecture Notes-2011Document84 pagesEE 368 Lecture Notes-2011frimponge100% (3)
- Close Circuit Circuito de CierreDocument12 pagesClose Circuit Circuito de CierreGabriel Maxo Papagallo100% (1)
- Statcom PDFDocument38 pagesStatcom PDFيوسف خضر النسورPas encore d'évaluation
- S-05-25 Generator Step-Up Transformer DataShts R0 NDA1Document20 pagesS-05-25 Generator Step-Up Transformer DataShts R0 NDA1selapPas encore d'évaluation
- 1 EB 60 y LV Switchgears Distribution 6,000: Part - ADocument6 pages1 EB 60 y LV Switchgears Distribution 6,000: Part - ASikander GirgoukarPas encore d'évaluation
- LPG Gas Detector (KP-35D) PDFDocument3 pagesLPG Gas Detector (KP-35D) PDFJhon Micheal AlicandoPas encore d'évaluation
- NTDC / Wapda ADB-49A: Power Transmission and Distribution Group Electrotechnical DocumentsDocument72 pagesNTDC / Wapda ADB-49A: Power Transmission and Distribution Group Electrotechnical DocumentsEngr Fahimuddin QureshiPas encore d'évaluation
- Close Circuit Circuito de CierreDocument6 pagesClose Circuit Circuito de CierreGabriel Maxo PapagalloPas encore d'évaluation
- Changes in E3 Workspace ConfigurationDocument4 pagesChanges in E3 Workspace ConfigurationamitobikramcPas encore d'évaluation
- Siemens Latest Price List For PowerDocument44 pagesSiemens Latest Price List For PowerPranav Mehta0% (1)
- Comparison of Newton Raphson and Gauss Seidel Methods For Power Flow AnalysisDocument7 pagesComparison of Newton Raphson and Gauss Seidel Methods For Power Flow AnalysisMokr AchourPas encore d'évaluation
- Brosur Voksel Hv-70kvDocument2 pagesBrosur Voksel Hv-70kvSyahrul MakkuassangPas encore d'évaluation
- Earth and Unearth Cable DifferenceDocument3 pagesEarth and Unearth Cable DifferenceDaya CheluvaPas encore d'évaluation
- Tricon Cable Ladder - Price ListDocument6 pagesTricon Cable Ladder - Price ListYanuar ZulkarnainPas encore d'évaluation
- PSC&O Lab4Document3 pagesPSC&O Lab4Hafeez AliPas encore d'évaluation
- PCS Explorer Auxiliary Software Instruct PDFDocument190 pagesPCS Explorer Auxiliary Software Instruct PDFTram E29Pas encore d'évaluation
- MCCB List Price 1.10.2015Document44 pagesMCCB List Price 1.10.2015dabburinkuPas encore d'évaluation
- FACTS Technologies SVC PDFDocument9 pagesFACTS Technologies SVC PDFKrishnanPas encore d'évaluation
- Annexure: Particulars Required For Overhead CrossingDocument1 pageAnnexure: Particulars Required For Overhead CrossingStephen BridgesPas encore d'évaluation
- Laporan Kegiatan Ramadhan 2018-2019Document8 pagesLaporan Kegiatan Ramadhan 2018-2019Masabi HomemadePas encore d'évaluation
- Etap - Spel InterfaceDocument9 pagesEtap - Spel Interfacemiguelgg78Pas encore d'évaluation
- Static Synchronous Compensator (Statcom) : Electricity and New EnergyDocument59 pagesStatic Synchronous Compensator (Statcom) : Electricity and New EnergyramyaPas encore d'évaluation
- 1HSB543260-ABT Sc. El.Document9 pages1HSB543260-ABT Sc. El.costelchelariuPas encore d'évaluation
- Bundle Spacer: Engineering DepartmentDocument4 pagesBundle Spacer: Engineering DepartmentpvenkyPas encore d'évaluation
- P3 Session1ADocument37 pagesP3 Session1Ahizbi7100% (1)
- 1HYB800001-042A-OM Manual (1-Pole) PDFDocument193 pages1HYB800001-042A-OM Manual (1-Pole) PDFFredy MedranoPas encore d'évaluation
- Lab - No.2 To Analyze IEEE-5 Load Bus Power System For Different Loading LoadsDocument5 pagesLab - No.2 To Analyze IEEE-5 Load Bus Power System For Different Loading LoadsHafeez AliPas encore d'évaluation
- SF6 BrochureDocument16 pagesSF6 BrochureNabeel AhmedPas encore d'évaluation
- Elcad731 Manual WorkshopDocument140 pagesElcad731 Manual WorkshopFranco LozanidisPas encore d'évaluation
- BOQ Elektromekanik ITP With CouplerDocument17 pagesBOQ Elektromekanik ITP With CouplerReinhard Jesaya SimbolonPas encore d'évaluation
- Calculation of Transmission Lines and Electrical Equipment of 150 KV Main Guluk-Guluk Madura Island East Java, IndonesiaDocument13 pagesCalculation of Transmission Lines and Electrical Equipment of 150 KV Main Guluk-Guluk Madura Island East Java, IndonesiaEditor IjasrePas encore d'évaluation
- PowerCalc 10 01Document12 pagesPowerCalc 10 01Salvador FayssalPas encore d'évaluation
- Study of Uprating Planning Overheard Transmission Line 70 KV To Be 150 KV GI Bangil - GI Blimbing LineDocument11 pagesStudy of Uprating Planning Overheard Transmission Line 70 KV To Be 150 KV GI Bangil - GI Blimbing LineAdi DharmaPas encore d'évaluation
- Etbw-063 Fabrication Drawing of Electrical Fittings - Rev.aDocument38 pagesEtbw-063 Fabrication Drawing of Electrical Fittings - Rev.aRM HaroonPas encore d'évaluation
- PGE 2012FinalPerUnitCostGuideDocument9 pagesPGE 2012FinalPerUnitCostGuidehanythekingPas encore d'évaluation
- Feasibility Study of Power Supply Upgrading in North West of Java IslandDocument170 pagesFeasibility Study of Power Supply Upgrading in North West of Java IslandTayachew BerhanPas encore d'évaluation
- DG Set Cap CalDocument2 pagesDG Set Cap Calshashi495100% (1)
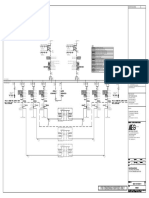
- Draw No - MEG-2113-KYE-CS-301 - 275kV Single Line DiagramDocument1 pageDraw No - MEG-2113-KYE-CS-301 - 275kV Single Line DiagramMohamad HishamPas encore d'évaluation
- 29.voltage Flicker Compensation Using STATCOMDocument6 pages29.voltage Flicker Compensation Using STATCOMdeepu227Pas encore d'évaluation
- LAR100 Series Solar Pump Inverter User ManualDocument29 pagesLAR100 Series Solar Pump Inverter User ManualfaitgpsPas encore d'évaluation
- Final Sherpur Battery Calculation.666Document16 pagesFinal Sherpur Battery Calculation.666tanvir arafinPas encore d'évaluation
- Elecrical Power SystemsDocument23 pagesElecrical Power SystemssrichanderPas encore d'évaluation
- Acsr SPLN 41-7 PDFDocument2 pagesAcsr SPLN 41-7 PDFAde Y Saputra100% (1)
- Eaton Power DocumentDocument24 pagesEaton Power Documentsai siriPas encore d'évaluation
- Electrical Price List 2016Document23 pagesElectrical Price List 2016shivamPas encore d'évaluation
- Ee 1404 Power System Lab ManualDocument63 pagesEe 1404 Power System Lab ManualSuhas Altruistic100% (1)
- Ex-801 Caps Practical FileDocument20 pagesEx-801 Caps Practical FileShubham Pal100% (1)
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualSasikala SivakumarPas encore d'évaluation
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualArivumani86% (14)
- Ee 1404 Power System Lab ManualDocument64 pagesEe 1404 Power System Lab ManualPrasenjit DeyPas encore d'évaluation
- Tiruchengode Divine POPDocument18 pagesTiruchengode Divine POPjayamanikandanPas encore d'évaluation
- Tiruchengode Divine POPDocument18 pagesTiruchengode Divine POPjayamanikandanPas encore d'évaluation
- PX7301-Power Electronics For Renewable Energy SystemsDocument11 pagesPX7301-Power Electronics For Renewable Energy Systemsanuj1166Pas encore d'évaluation
- An Micro Teaching AdderDocument19 pagesAn Micro Teaching AdderjayamanikandanPas encore d'évaluation
- PX7301-Power Electronics For Renewable Energy SystemsDocument11 pagesPX7301-Power Electronics For Renewable Energy Systemsanuj1166Pas encore d'évaluation
- Purchase Order For C&i LabDocument2 pagesPurchase Order For C&i LabjayamanikandanPas encore d'évaluation
- System Identification and Adaptive ControlDocument1 pageSystem Identification and Adaptive ControljayamanikandanPas encore d'évaluation
- AU Chennai R 2008 PDFDocument109 pagesAU Chennai R 2008 PDFjayamanikandanPas encore d'évaluation
- Survival Benefit Payout FormDocument1 pageSurvival Benefit Payout Formjayamanikandan100% (1)
- Specimen Signature FormEC72CA02086EDocument1 pageSpecimen Signature FormEC72CA02086EjayamanikandanPas encore d'évaluation
- Eee 5 8semDocument57 pagesEee 5 8semvimindianPas encore d'évaluation
- MATLAB Program For Short Circuit Analysis - EE1404 - Power System Simulation Laboratory - Source Code SolutionsDocument4 pagesMATLAB Program For Short Circuit Analysis - EE1404 - Power System Simulation Laboratory - Source Code SolutionsjayamanikandanPas encore d'évaluation
- EEE Lab RequirementsDocument29 pagesEEE Lab RequirementsDilli SrinivasanPas encore d'évaluation
- Simplified Model of PVDocument5 pagesSimplified Model of PVkarpagasenthilpandyPas encore d'évaluation
- PSS LabDocument14 pagesPSS LabjayamanikandanPas encore d'évaluation
- Matlab PPTworkshop1Document32 pagesMatlab PPTworkshop1jayamanikandanPas encore d'évaluation
- Block DiagramDocument1 pageBlock DiagramjayamanikandanPas encore d'évaluation
- PSS Lab ManualDocument115 pagesPSS Lab ManualjayamanikandanPas encore d'évaluation
- 5th SEMDocument10 pages5th SEMChandra SekaranPas encore d'évaluation
- 10 Key Points For A Very Successful Job InterviewDocument1 page10 Key Points For A Very Successful Job InterviewjayamanikandanPas encore d'évaluation
- Eee SyllabusDocument111 pagesEee SyllabusDhana SelvamPas encore d'évaluation
- Edc EquipmentsDocument1 pageEdc EquipmentsjayamanikandanPas encore d'évaluation
- Jci Tiruchengode TempleDocument9 pagesJci Tiruchengode TemplejayamanikandanPas encore d'évaluation
- RMS - AcDocument4 pagesRMS - AcjayamanikandanPas encore d'évaluation
- Fin e 274 2011Document2 pagesFin e 274 2011jayamanikandanPas encore d'évaluation
- 8-Bit A Synchronous Wave-Pipelined RSFQDocument5 pages8-Bit A Synchronous Wave-Pipelined RSFQjayamanikandanPas encore d'évaluation
- NPCC-A-02 Basic Criteria For Design and Operation of Interconnected Power SystemDocument15 pagesNPCC-A-02 Basic Criteria For Design and Operation of Interconnected Power SystemStefan LeePas encore d'évaluation
- WEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.5x Guia Rapido Portugues BR PDFDocument80 pagesWEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.5x Guia Rapido Portugues BR PDFAllanLeitePas encore d'évaluation
- SAFE Operation & Maintenance InstructionDocument23 pagesSAFE Operation & Maintenance InstructionEléctrico EléctricoPas encore d'évaluation
- Parametros PowerFlex 525Document5 pagesParametros PowerFlex 525Rafael Chourio100% (1)
- Applications To Sizing Circuit Breakers (ANSI C37)Document22 pagesApplications To Sizing Circuit Breakers (ANSI C37)freddy riveraPas encore d'évaluation
- SIP5-APN-016 Distance Protection With Tele-Protection On An OHL Feeder enDocument32 pagesSIP5-APN-016 Distance Protection With Tele-Protection On An OHL Feeder enKhajaBurhanPas encore d'évaluation
- HT Cable SizingDocument12 pagesHT Cable SizingGanesh SantoshPas encore d'évaluation
- IEEE Guide For Protective RelayDocument141 pagesIEEE Guide For Protective RelayLuis Ignacio Sánchez100% (7)
- 7SS52 enDocument418 pages7SS52 envsrikala68Pas encore d'évaluation
- Technical CatalogueDocument62 pagesTechnical CatalogueYanuar Ardian PutraPas encore d'évaluation
- Press Release: How To Design and Size A BusbarDocument3 pagesPress Release: How To Design and Size A Busbarlehaphuong03Pas encore d'évaluation
- Cresall Resistor NGRDocument36 pagesCresall Resistor NGRhansamvPas encore d'évaluation
- Fault Detection Isolation and RestorationDocument7 pagesFault Detection Isolation and Restorationsincos1983Pas encore d'évaluation
- DBD User ManualDocument34 pagesDBD User Manualanand0% (1)
- High Voltage Circuite Breakers Table of Content and First PagesDocument14 pagesHigh Voltage Circuite Breakers Table of Content and First PagesAmer Smajkić0% (1)
- 20 1 04report enDocument98 pages20 1 04report enJeremy McconnellPas encore d'évaluation
- 2400 Series Fa Manual PDFDocument79 pages2400 Series Fa Manual PDFranjaniPas encore d'évaluation
- L3 U304 Session 1 Earthing and BondingDocument40 pagesL3 U304 Session 1 Earthing and Bondinggeorgeowen100% (1)
- 2015 04 Protection DevicesDocument58 pages2015 04 Protection DevicesSujoy SamantaPas encore d'évaluation
- Arc Flash IEI Reduction 3000DB0810R608 PDFDocument8 pagesArc Flash IEI Reduction 3000DB0810R608 PDFShahrizal ErlanggaPas encore d'évaluation
- ABB MCB CatalogDocument16 pagesABB MCB CatalogkarthiknmanuPas encore d'évaluation
- Fault Codes - Multi & CACDocument19 pagesFault Codes - Multi & CACGabriel Marian BechmanPas encore d'évaluation
- 05-Presentation Motor ProtectionDocument47 pages05-Presentation Motor ProtectionRajesh Pillai100% (5)
- IEEE C37 (1) .108-1989 TransformersDocument38 pagesIEEE C37 (1) .108-1989 Transformersgnpr_10106080Pas encore d'évaluation
- Manual Equipo DanfossDocument60 pagesManual Equipo Danfosscolive1100% (2)
- Downloaded File-187 PDFDocument6 pagesDownloaded File-187 PDFEBEPas encore d'évaluation
- Grounding and Ground Fault Protection of Multiple GeneratorsDocument26 pagesGrounding and Ground Fault Protection of Multiple Generatorssispot_engPas encore d'évaluation
- Short Circuit Current Calculation (Base KVA Method) - Electrical Notes & ArticlesDocument9 pagesShort Circuit Current Calculation (Base KVA Method) - Electrical Notes & ArticlesBalamurugan ArumugamPas encore d'évaluation
- Books - EPRI Distribution Planning Guidebook PDFDocument254 pagesBooks - EPRI Distribution Planning Guidebook PDFSaleem100% (2)