Vous aimerez peut-être aussi
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionD'EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionPas encore d'évaluation
- Cip Safety Pf527 Hott 2015 v1 - 2 Mar 18 2015Document16 pagesCip Safety Pf527 Hott 2015 v1 - 2 Mar 18 2015ipasa100% (1)
- 01 3 Mechatronics LabDocument6 pages01 3 Mechatronics LabSangeetha VenkatPas encore d'évaluation
- RSLOGIX5000 Programming A Complete Guide - 2020 EditionD'EverandRSLOGIX5000 Programming A Complete Guide - 2020 EditionPas encore d'évaluation
- Simple Motion Control Via Ethernet/Ip With Kinetix 300 Drives Connected Components Building BlockDocument52 pagesSimple Motion Control Via Ethernet/Ip With Kinetix 300 Drives Connected Components Building BlockRavi ArunPas encore d'évaluation
- Stratix 2500 Lightly Managed Switches: User ManualDocument156 pagesStratix 2500 Lightly Managed Switches: User ManualsiemensPas encore d'évaluation
- Panelview Plus 6 Terminals: User ManualDocument191 pagesPanelview Plus 6 Terminals: User ManualIsraelPas encore d'évaluation
- P Alarm 2.0 Syslib Rm002c en eDocument40 pagesP Alarm 2.0 Syslib Rm002c en eBeto De HermosilloPas encore d'évaluation
- Motion Rm003 en PDocument354 pagesMotion Rm003 en PAmira TouatiPas encore d'évaluation
- Process Control PDFDocument99 pagesProcess Control PDFmoreharish10Pas encore d'évaluation
- DSASW0052286Document746 pagesDSASW0052286ANIRUDDHA BARTAKEPas encore d'évaluation
- Ra Um003 - en P PDFDocument209 pagesRa Um003 - en P PDFwilliePas encore d'évaluation
- D - Pro Action: Programmable FunctionsDocument11 pagesD - Pro Action: Programmable FunctionsAngel Irka PaunovPas encore d'évaluation
- PLC PDFDocument28 pagesPLC PDFelin373Pas encore d'évaluation
- Enet At007 - en PDocument94 pagesEnet At007 - en PAkshay AryaPas encore d'évaluation
- Electronic Cam Motion Generation With Special ReferenceDocument17 pagesElectronic Cam Motion Generation With Special ReferenceMillah HanifahPas encore d'évaluation
- 1756 Um543 - en PDocument152 pages1756 Um543 - en Pshijub_0010% (1)
- Product Profile - Kinetix® 6500 - 2094-pp005 - En-P PDFDocument4 pagesProduct Profile - Kinetix® 6500 - 2094-pp005 - En-P PDFNicolás A. SelvaggioPas encore d'évaluation
- Motion Calculate Cam Profile (MCCP)Document4 pagesMotion Calculate Cam Profile (MCCP)Jose RomeroPas encore d'évaluation
- Motion Rm003 en PDocument715 pagesMotion Rm003 en PSamuel OliveiraPas encore d'évaluation
- GMC rm003 - en PDocument120 pagesGMC rm003 - en PHilder Ramirez PuellesPas encore d'évaluation
- Proces rm007 - en P PDFDocument108 pagesProces rm007 - en P PDFrodriggoguedesPas encore d'évaluation
- Servo Motors: Product DataDocument52 pagesServo Motors: Product DataAnoj Pahathkumbura100% (1)
- L13 - Studio 5000 and Logix AdvancedDocument35 pagesL13 - Studio 5000 and Logix AdvancedcuongvcsPas encore d'évaluation
- CoTMS-59 FactoryTalk Historian Site Edition Advanced LabDocument90 pagesCoTMS-59 FactoryTalk Historian Site Edition Advanced LabJose SierraPas encore d'évaluation
- Tutorial 02 PLC PDFDocument23 pagesTutorial 02 PLC PDFTete GoriPas encore d'évaluation
- L16 - Model Predictive Control Within The Logix Controller Lab ManualDocument87 pagesL16 - Model Predictive Control Within The Logix Controller Lab Manualheliomartins48Pas encore d'évaluation
- Iasimp Qs034 en PDocument278 pagesIasimp Qs034 en PÁgost VitaPas encore d'évaluation
- CNC Look Ahead S ShapeDocument13 pagesCNC Look Ahead S ShapeinsaninsidePas encore d'évaluation
- ABT-1756-TSJ60 2017-07.TextMarkDocument366 pagesABT-1756-TSJ60 2017-07.TextMarkMarius MihaescuPas encore d'évaluation
- AddOn (P ValveMO)Document52 pagesAddOn (P ValveMO)carbono980Pas encore d'évaluation
- Aaa2 PDFDocument561 pagesAaa2 PDFjosmera88Pas encore d'évaluation
- Acknowledge All Alarms in The Alarms and Events Summary Without The Popup Comment PDFDocument4 pagesAcknowledge All Alarms in The Alarms and Events Summary Without The Popup Comment PDFDavid DuranPas encore d'évaluation
- L09 - Drive Configuration and Programming Lab: PublicDocument133 pagesL09 - Drive Configuration and Programming Lab: PubliccuongvcsPas encore d'évaluation
- Powermonitor 500 Unit: User ManualDocument108 pagesPowermonitor 500 Unit: User ManualAlex RivasPas encore d'évaluation
- CD1604 State of Technology On PLCs PACs PCsDocument39 pagesCD1604 State of Technology On PLCs PACs PCsAldrian MacuaPas encore d'évaluation
- How To Communicate Between A PanelView Plus and A MicroLogixDocument7 pagesHow To Communicate Between A PanelView Plus and A MicroLogixAkio López HatanakaPas encore d'évaluation
- Logix 5000 Controllers Design Considerations: Reference ManualDocument130 pagesLogix 5000 Controllers Design Considerations: Reference ManualHawk MrPas encore d'évaluation
- Lab 12 Industrial AutomationDocument4 pagesLab 12 Industrial AutomationMuhammad UmarPas encore d'évaluation
- Networx: Rsnetworx For Devicenet Getting Results GuideDocument62 pagesNetworx: Rsnetworx For Devicenet Getting Results GuideCarlos MusellaPas encore d'évaluation
- Rockwell Automation TechED 2017 - SY29 - Moving Toward A Connected Enterprise by Modernizing Your Control and Information Systems Lab ManualDocument113 pagesRockwell Automation TechED 2017 - SY29 - Moving Toward A Connected Enterprise by Modernizing Your Control and Information Systems Lab ManualIsaac MendiblePas encore d'évaluation
- Physics KinematicsDocument34 pagesPhysics KinematicsSammasterzPas encore d'évaluation
- Drive Field KCL 20181004ESAGIntegrated Motion Update October 2018Document54 pagesDrive Field KCL 20181004ESAGIntegrated Motion Update October 2018vuPas encore d'évaluation
- PLCDocument30 pagesPLCAnkit ShuklaPas encore d'évaluation
- GML Ultra Getting Started - 1398-5.10Document86 pagesGML Ultra Getting Started - 1398-5.10David MartinezPas encore d'évaluation
- Motion Rm003 en PDocument707 pagesMotion Rm003 en PNelsonPas encore d'évaluation
- KNX sg001 - en PDocument234 pagesKNX sg001 - en PNelsonPas encore d'évaluation
- PLC TroubleshootDocument57 pagesPLC Troubleshootphillar pratamaPas encore d'évaluation
- Introduction To Logix Hands-On Lab Presenter: Liz Bahl Commercial EngineeringDocument84 pagesIntroduction To Logix Hands-On Lab Presenter: Liz Bahl Commercial EngineeringRaul Roque YujraPas encore d'évaluation
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavPas encore d'évaluation
- Theory Machines 4 Cams: Classification of Cams and Followers: Disk or Plate Cam With Radial Roller FollowerDocument16 pagesTheory Machines 4 Cams: Classification of Cams and Followers: Disk or Plate Cam With Radial Roller FollowerGabriel Jia Yong EePas encore d'évaluation
- 1756 Um016a en P PDFDocument196 pages1756 Um016a en P PDFandrea19711971Pas encore d'évaluation
- Unit1 2Document30 pagesUnit1 2CHETAN SETIYAPas encore d'évaluation
- Adaptable PID Controller For Industrial Hot and Cold ChamberDocument46 pagesAdaptable PID Controller For Industrial Hot and Cold ChamberSajid NasirPas encore d'évaluation
- 1756-HSC Various ConfigurationsDocument6 pages1756-HSC Various ConfigurationsPaul Ramos CarcaustoPas encore d'évaluation
- PLCProgrammingwith RSLogix 5000Document168 pagesPLCProgrammingwith RSLogix 5000DanielCardonaPas encore d'évaluation
- 1756 pm006 - en P PDFDocument92 pages1756 pm006 - en P PDFEnzo Luciano Scilla GodoyPas encore d'évaluation
- Ge VFD MotorsDocument33 pagesGe VFD Motorssanjay.gawadePas encore d'évaluation
- WTOPCSvrDocument20 pagesWTOPCSvrPedro PradoPas encore d'évaluation
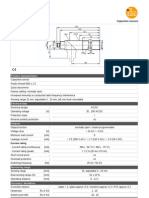
- Capacitive Sensors: Product CharacteristicsDocument2 pagesCapacitive Sensors: Product CharacteristicsPedro PradoPas encore d'évaluation
- Using The Agilent Intuilink Software: Oscilloscopes, 54600-Series Version 3.1Document1 pageUsing The Agilent Intuilink Software: Oscilloscopes, 54600-Series Version 3.1Pedro PradoPas encore d'évaluation
- Get Recibi Obtener Compre ConseguirDocument1 pageGet Recibi Obtener Compre ConseguirPedro PradoPas encore d'évaluation
- Circuito 1Document1 pageCircuito 1Pedro PradoPas encore d'évaluation
- Coal Mine Road Way Support System HandbookDocument76 pagesCoal Mine Road Way Support System HandbookRANGEROADPas encore d'évaluation
- Imanager U2000 V200R016C50 Single-Server System Software Installation and Commissioning Guide (Windows) 10 (PDF) - C PDFDocument418 pagesImanager U2000 V200R016C50 Single-Server System Software Installation and Commissioning Guide (Windows) 10 (PDF) - C PDFAnonymous 40MGQ4yJDKPas encore d'évaluation
- Mother BoardDocument29 pagesMother BoardSwayamprakash PatelPas encore d'évaluation
- 8085 Microprocessor Project Digital Frequency MeterDocument2 pages8085 Microprocessor Project Digital Frequency MeterShrey BhatnagarPas encore d'évaluation
- Network Video Recorder - Quick Start Guide - V1.0.0-EngDocument33 pagesNetwork Video Recorder - Quick Start Guide - V1.0.0-EngRichard Mark FreoPas encore d'évaluation
- BAPI EnhancementDocument6 pagesBAPI EnhancementSathish B SathishPas encore d'évaluation
- OperatorsDocument13 pagesOperatorsadfadfPas encore d'évaluation
- Management PricipalDocument7 pagesManagement PricipalmdivyalakshmiPas encore d'évaluation
- BitcoinDocument2 pagesBitcoinnonsme2Pas encore d'évaluation
- Important Characterstics of 555 Timer IC: Circuits Based On 5555 ICDocument6 pagesImportant Characterstics of 555 Timer IC: Circuits Based On 5555 ICManohar PotnuruPas encore d'évaluation
- Sap BW Data Modeling GuideDocument18 pagesSap BW Data Modeling GuideSapbi SriPas encore d'évaluation
- Electrical Part ListDocument6 pagesElectrical Part ListdachajiPas encore d'évaluation
- Choker Brute - Pathfinder - OGCDocument2 pagesChoker Brute - Pathfinder - OGCdnddownloaderPas encore d'évaluation
- Power Budget - Problem Set 2Document21 pagesPower Budget - Problem Set 2Ponmalar SivarajPas encore d'évaluation
- Carle e Montanari at Ipack Ima - GB PDFDocument2 pagesCarle e Montanari at Ipack Ima - GB PDFRolyBernalPas encore d'évaluation
- Global Work Cell Phone PolicyDocument7 pagesGlobal Work Cell Phone Policyshaquan josephsPas encore d'évaluation
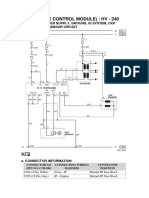
- Diagramas AveoDocument21 pagesDiagramas AveoAdrian PeñaPas encore d'évaluation
- Microsoft SQL Server To IBM DB2 UDB Conversion GuideDocument558 pagesMicrosoft SQL Server To IBM DB2 UDB Conversion GuideBupBeChanhPas encore d'évaluation
- Electronic Squared SquaresDocument97 pagesElectronic Squared SquaresGeoffrey OrtizPas encore d'évaluation
- Assighment 1 Ma Thu Hương GCD201620Document65 pagesAssighment 1 Ma Thu Hương GCD201620Bao Trang TrangPas encore d'évaluation
- Business Analytics and Big Data OutlineDocument4 pagesBusiness Analytics and Big Data OutlineCream FamilyPas encore d'évaluation
- MK4 A (With ONDA Technology) : Contactless Magnetostrictive Linear Position Transducer (Analog Output)Document4 pagesMK4 A (With ONDA Technology) : Contactless Magnetostrictive Linear Position Transducer (Analog Output)davidhellfirePas encore d'évaluation
- X12/V6020/810: 810 InvoiceDocument38 pagesX12/V6020/810: 810 Invoicejeffa123Pas encore d'évaluation
- Z ScoresDocument27 pagesZ ScoresSoma San JosePas encore d'évaluation
- S6206 Thales Point MachineDocument32 pagesS6206 Thales Point Machineمعتز يحيى100% (2)
- The Magic Cafe Forums - Forcing A TimeDocument4 pagesThe Magic Cafe Forums - Forcing A TimeHendri AlamPas encore d'évaluation
- Intro CH 01blooking Inside The Computer SystemDocument17 pagesIntro CH 01blooking Inside The Computer Systemapi-247714257Pas encore d'évaluation
- ION 2008 An Analysis of MMOG Subscription GrowthDocument30 pagesION 2008 An Analysis of MMOG Subscription Growthdigitalbridgemedia100% (2)
- Chapter 3 Arithmetic For ComputersDocument49 pagesChapter 3 Arithmetic For ComputersicedalbertPas encore d'évaluation
- Computerized Sales and Inventory System For 3K A.D Agliam Construction SupplyDocument25 pagesComputerized Sales and Inventory System For 3K A.D Agliam Construction SupplyRica Jhoy De VeraPas encore d'évaluation