Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Chapter 10 Tute Solutions PDFDocument7 pagesChapter 10 Tute Solutions PDFAi Tien TranPas encore d'évaluation
- 40 Sink and FloatDocument38 pages40 Sink and Floatleandro hualverdePas encore d'évaluation
- Soft Skills & Personality DevelopmentDocument62 pagesSoft Skills & Personality DevelopmentSajid PashaPas encore d'évaluation
- Boom-Block Gambit: Redemption'S RiseDocument44 pagesBoom-Block Gambit: Redemption'S RiseNone OfyourbuisnessPas encore d'évaluation
- PDFDocument3 pagesPDFAhmedraza123 NagdaPas encore d'évaluation
- Jonathan Livingston Seagull - Richard Bach - (SAW000) PDFDocument39 pagesJonathan Livingston Seagull - Richard Bach - (SAW000) PDFAdrià SonetPas encore d'évaluation
- Pubb-0589-L-Rock-mass Hydrojacking Risk Related To Pressurized Water TunnelsDocument10 pagesPubb-0589-L-Rock-mass Hydrojacking Risk Related To Pressurized Water Tunnelsinge ocPas encore d'évaluation
- Session 1Document18 pagesSession 1Akash GuptaPas encore d'évaluation
- Assessment of Embodied Carbon Emissions For Building Construc - 2016 - Energy AnDocument11 pagesAssessment of Embodied Carbon Emissions For Building Construc - 2016 - Energy Any4smaniPas encore d'évaluation
- Praise and Worship Songs Volume 2 PDFDocument92 pagesPraise and Worship Songs Volume 2 PDFDaniel AnayaPas encore d'évaluation
- ST Arduino Labs CombinedDocument80 pagesST Arduino Labs CombineddevProPas encore d'évaluation
- SCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Document104 pagesSCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Athulya ThondangattilPas encore d'évaluation
- John DrydenDocument3 pagesJohn DrydenDunas SvetlanaPas encore d'évaluation
- Literature Review Template DownloadDocument4 pagesLiterature Review Template Downloadaflsigfek100% (1)
- SG110CX: Multi-MPPT String Inverter For SystemDocument2 pagesSG110CX: Multi-MPPT String Inverter For SystemKatherine SmithPas encore d'évaluation
- Project Quality Plan (JFJS-788)Document18 pagesProject Quality Plan (JFJS-788)mominPas encore d'évaluation
- Manuel SYL233 700 EDocument2 pagesManuel SYL233 700 ESiddiqui SarfarazPas encore d'évaluation
- The New Order of BarbariansDocument39 pagesThe New Order of Barbariansbadguy100% (1)
- Note!: Rear Shock Absorber For YAMAHA N-MAXDocument4 pagesNote!: Rear Shock Absorber For YAMAHA N-MAXAdityaArnas0% (1)
- European Asphalt Standards DatasheetDocument1 pageEuropean Asphalt Standards DatasheetmandraktrecePas encore d'évaluation
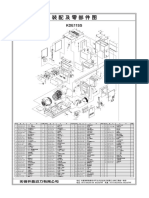
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1Pas encore d'évaluation
- Reference Paper Literature ReviewDocument5 pagesReference Paper Literature ReviewAani RashPas encore d'évaluation
- CFD Turbina Michell BankiDocument11 pagesCFD Turbina Michell BankiOscar Choque JaqquehuaPas encore d'évaluation
- Fuzzy Gain Scheduled Pi Controller For ADocument5 pagesFuzzy Gain Scheduled Pi Controller For AOumayPas encore d'évaluation
- Full Project LibraryDocument77 pagesFull Project LibraryChala Geta0% (1)
- Ultra ConductorsDocument28 pagesUltra ConductorsAnu Kp50% (8)
- 2500 Valve BrochureDocument12 pages2500 Valve BrochureJurie_sk3608Pas encore d'évaluation
- Origin ManualDocument186 pagesOrigin ManualmariaPas encore d'évaluation
- 0012 Mergers and Acquisitions Current Scenario andDocument20 pages0012 Mergers and Acquisitions Current Scenario andJuke LastPas encore d'évaluation
- Hele Grade4Document56 pagesHele Grade4Chard Gonzales100% (3)