Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Chapter-4 Deflection and StiffnessDocument48 pagesChapter-4 Deflection and StiffnessDhineshkumar MuruganPas encore d'évaluation
- 15me53 Important Questions Paper-3Document3 pages15me53 Important Questions Paper-3Karthi SiddhPas encore d'évaluation
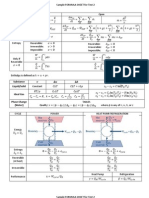
- Sample Formula Sheet For ThermodynamicsDocument2 pagesSample Formula Sheet For Thermodynamicsmicrop_aras100% (3)
- Circular Platform Design AISC - ImperialDocument54 pagesCircular Platform Design AISC - ImperialRajveer SinghPas encore d'évaluation
- Hoek Brown and GSI 2018 22 June 2018 FinalDocument23 pagesHoek Brown and GSI 2018 22 June 2018 FinalVictor Miguel Vergara LoveraPas encore d'évaluation
- Tutor Marked Assignment: ECX5243 - Physical and Opto ElectronicsDocument2 pagesTutor Marked Assignment: ECX5243 - Physical and Opto ElectronicsDK White LionPas encore d'évaluation
- Study of Heat Transfer Coefficient in A Double Pipe Heat ExchangerDocument22 pagesStudy of Heat Transfer Coefficient in A Double Pipe Heat Exchangermahbub13320% (1)
- Bond Stress-Slip Response of Reinforcing Bars Embedded in FRC Matrices Under Monotonic and Cyclic LoadingDocument12 pagesBond Stress-Slip Response of Reinforcing Bars Embedded in FRC Matrices Under Monotonic and Cyclic LoadingpicottPas encore d'évaluation
- Upheaval Buckling of Pipelines-2016 PDFDocument13 pagesUpheaval Buckling of Pipelines-2016 PDFwaseemiqbal133Pas encore d'évaluation
- Retaining Wall 21.9.21Document44 pagesRetaining Wall 21.9.21kamal kumar MallikarjunaPas encore d'évaluation
- Combined Convection and Radiation PDFDocument2 pagesCombined Convection and Radiation PDFAlexis0% (1)
- Vtu Syllabus 02 PDFDocument6 pagesVtu Syllabus 02 PDFAmarPas encore d'évaluation
- Electronic Band Structure of Solids: Introduction To Solid State PhysicsDocument49 pagesElectronic Band Structure of Solids: Introduction To Solid State PhysicsgirmagPas encore d'évaluation
- 3.1B Certificat - ModèleDocument1 page3.1B Certificat - Modèlescribdhas2006Pas encore d'évaluation
- ACI SP 297 Nonlinear Modeling Parameters and Acceptance CriteriaDocument210 pagesACI SP 297 Nonlinear Modeling Parameters and Acceptance CriteriaHansV.HuamaníCamargoPas encore d'évaluation
- Design of Steel I-Section (BS5950)Document3 pagesDesign of Steel I-Section (BS5950)gertjaniPas encore d'évaluation
- Pressure Vessel - Torispherical Head PDFDocument5 pagesPressure Vessel - Torispherical Head PDFGeorge_Wabag_2014Pas encore d'évaluation
- 3D Stress and Strain Tutorial SheetDocument2 pages3D Stress and Strain Tutorial SheetTasmin Chandran0% (1)
- DNV Cn30-1Document15 pagesDNV Cn30-1Ahmed100% (1)
- Extended Abstract Filipa East Da Camara, n72626Document12 pagesExtended Abstract Filipa East Da Camara, n72626nnnnnaaaaaPas encore d'évaluation
- CFD DivingForceForSolidification PDFDocument8 pagesCFD DivingForceForSolidification PDFbushraPas encore d'évaluation
- A Brief Introduc - On To The Delights Of: Non-Equilibrium Sta0s0cal PhysicsDocument26 pagesA Brief Introduc - On To The Delights Of: Non-Equilibrium Sta0s0cal PhysicsThales FreirePas encore d'évaluation
- PRESTRESSED CONCRETE 03 Rev00Document4 pagesPRESTRESSED CONCRETE 03 Rev00Hussein MuslihPas encore d'évaluation
- NZS 3101-2006 PT-SL Example 001Document6 pagesNZS 3101-2006 PT-SL Example 001Fredy Sandro Rosas FloresPas encore d'évaluation
- Computerization of Unviersal Testing MachineDocument7 pagesComputerization of Unviersal Testing Machinemohamedsadiq555Pas encore d'évaluation
- Column & Shear Wall Shortening by Praveen MoragaspitiyaDocument157 pagesColumn & Shear Wall Shortening by Praveen Moragaspitiyasuman33100% (1)
- Lecture 47 - Laterally Supported BeamsDocument11 pagesLecture 47 - Laterally Supported BeamsSudarshan BarolePas encore d'évaluation
- Non NewtonianDocument16 pagesNon NewtonianAziz RahmatullahPas encore d'évaluation
- Solid Mechanics ENSC3004: Format of Unit Delivery - TimetableDocument15 pagesSolid Mechanics ENSC3004: Format of Unit Delivery - TimetableAPPas encore d'évaluation