Vous aimerez peut-être aussi
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Kama Sutra - Sex Positions - EnglishDocument149 pagesKama Sutra - Sex Positions - Englishsteriandediu63% (132)
- Investigating Hair Properties Relevant For Hair Handle'. Part I: Hair Diameter, Bending and Frictional PropertiesDocument8 pagesInvestigating Hair Properties Relevant For Hair Handle'. Part I: Hair Diameter, Bending and Frictional Propertiesapi-3733260Pas encore d'évaluation
- Electrospun Ultra-Fine Silk Fibroin Fibers From Aqueous SolutionsDocument5 pagesElectrospun Ultra-Fine Silk Fibroin Fibers From Aqueous Solutionsapi-3733260Pas encore d'évaluation
- IRIDAGDocument5 pagesIRIDAGapi-3733260Pas encore d'évaluation
- The Size Effects On The Mechanical Behaviour of FibresDocument9 pagesThe Size Effects On The Mechanical Behaviour of Fibresapi-3733260Pas encore d'évaluation
- Gas Flow Around and Through Textile Structures During Plasma TreatmentDocument8 pagesGas Flow Around and Through Textile Structures During Plasma Treatmentapi-3733260Pas encore d'évaluation
- Bending Stress Relaxation and Recovery Wool, Nylon 66, and Terylene FibersDocument21 pagesBending Stress Relaxation and Recovery Wool, Nylon 66, and Terylene Fibersapi-3733260Pas encore d'évaluation
- Effects of Processing Condition On The Filtration Performances of Nonwovens For Bag Filter MediaDocument6 pagesEffects of Processing Condition On The Filtration Performances of Nonwovens For Bag Filter Mediaapi-3733260Pas encore d'évaluation
- The Influence Drawing, Twisting, Heat Setting, and Untwisting On The Structure and Mechanical Properties of Melt-Spun High-Density Polyethylene FiberDocument25 pagesThe Influence Drawing, Twisting, Heat Setting, and Untwisting On The Structure and Mechanical Properties of Melt-Spun High-Density Polyethylene Fiberapi-3733260Pas encore d'évaluation
- ULLMANDocument2 pagesULLMANapi-3733260Pas encore d'évaluation
- Heat Setting of Oriented Poly (Ethylene Terephthalate) Effects of Deformation Mode, Strain Level, and Heating MediumDocument15 pagesHeat Setting of Oriented Poly (Ethylene Terephthalate) Effects of Deformation Mode, Strain Level, and Heating Mediumapi-3733260Pas encore d'évaluation
- Stress-Relaxation Hardening of Nylon 66 FilamentsDocument6 pagesStress-Relaxation Hardening of Nylon 66 Filamentsapi-3733260Pas encore d'évaluation
- The Effect of Dyes and Dyeing On The Mechanical Properties of Polymeric MaterialsDocument7 pagesThe Effect of Dyes and Dyeing On The Mechanical Properties of Polymeric Materialsapi-3733260Pas encore d'évaluation
- Steam Dry: Heat of 6 I. Effect of Heat Setting and Steam Setting On Young's Gravity of 6Document7 pagesSteam Dry: Heat of 6 I. Effect of Heat Setting and Steam Setting On Young's Gravity of 6api-3733260Pas encore d'évaluation
- Linear Viscoelasticity: 5.1 Model EquationsDocument16 pagesLinear Viscoelasticity: 5.1 Model Equationsapi-3733260Pas encore d'évaluation
- Pressure Dependence of The Shear Modulus of Various PolymersDocument4 pagesPressure Dependence of The Shear Modulus of Various Polymersapi-3733260Pas encore d'évaluation
- S TonDocument3 pagesS Tonapi-3733260Pas encore d'évaluation
- The Tensile Behaviour of Polyethylene TerephthalateDocument9 pagesThe Tensile Behaviour of Polyethylene Terephthalateapi-3733260Pas encore d'évaluation
- RIGBYDocument3 pagesRIGBYapi-3733260Pas encore d'évaluation
- A Review of Reviews: 40Th AnniversaryDocument4 pagesA Review of Reviews: 40Th Anniversaryapi-3733260Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 820-3740 Technical OverviewDocument238 pages820-3740 Technical Overviewppjim100% (1)
- Dental Chair: A-Dec Service Guide, Vol. IIDocument40 pagesDental Chair: A-Dec Service Guide, Vol. IIQuang Định ĐinhPas encore d'évaluation
- Project PDFDocument13 pagesProject PDFapi-697727439Pas encore d'évaluation
- Iqmin A Jktinv0087205 Jktyulia 20230408071006Document1 pageIqmin A Jktinv0087205 Jktyulia 20230408071006Rahayu UmarPas encore d'évaluation
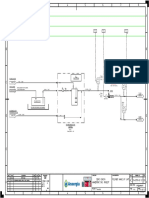
- Initial PID - 19-0379 A01 01Document39 pagesInitial PID - 19-0379 A01 01rajap2737Pas encore d'évaluation
- Why JSON in PostgreSQL Is AwesomeDocument7 pagesWhy JSON in PostgreSQL Is AwesomeTeo TokisPas encore d'évaluation
- Accident Alert With Automatic DialerDocument39 pagesAccident Alert With Automatic Dialersenanath8100% (1)
- 8 PCO Training Invitation Letter December 2018Document2 pages8 PCO Training Invitation Letter December 2018sayo goraPas encore d'évaluation
- 752 BMW Individual High End Audio SystemDocument2 pages752 BMW Individual High End Audio SystemstePas encore d'évaluation
- Century Lookbook CatalogueDocument162 pagesCentury Lookbook Cataloguefwd2datta50% (2)
- Ac To DC Converter Project Report PDFDocument75 pagesAc To DC Converter Project Report PDFVishal Bhadalda100% (1)
- What Is A SAP LockDocument3 pagesWhat Is A SAP LockKishore KumarPas encore d'évaluation
- LanDocument5 pagesLanannamyemPas encore d'évaluation
- Midas Civil WebinarDocument51 pagesMidas Civil WebinarCHarlesghylonPas encore d'évaluation
- Arduino Water Flow Sensor CodeDocument6 pagesArduino Water Flow Sensor CodeNasruddin AVPas encore d'évaluation
- J Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementDocument4 pagesJ Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementmtichyscribdPas encore d'évaluation
- Bus & Cycle Signs & MarkingsDocument5 pagesBus & Cycle Signs & MarkingsDaniel YitbarekPas encore d'évaluation
- Ijetr022724 PDFDocument12 pagesIjetr022724 PDFerpublicationPas encore d'évaluation
- K C Chakrabarty: Financial Inclusion and Banks - Issues and PerspectivesDocument9 pagesK C Chakrabarty: Financial Inclusion and Banks - Issues and PerspectivesAnamika Rai PandeyPas encore d'évaluation
- Chapter 1 - Introduction To Employee Training and Development - 3Document27 pagesChapter 1 - Introduction To Employee Training and Development - 3Chaudry Adeel100% (1)
- Emission Test Station - Workshop: Multi-FuelDocument2 pagesEmission Test Station - Workshop: Multi-FuelARMANDO HERNANDEZPas encore d'évaluation
- Pumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemDocument2 pagesPumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemTeknik MakinaPas encore d'évaluation
- Soichiro HondaDocument5 pagesSoichiro HondaVeronika YsPas encore d'évaluation
- Process Safety BeaconDocument1 pageProcess Safety BeaconRaul tejadaPas encore d'évaluation
- Carbonate PetrophysicsDocument6 pagesCarbonate PetrophysicsRovshan1988Pas encore d'évaluation
- ISRA University FormDocument4 pagesISRA University Formpure14Pas encore d'évaluation
- Siva QADocument6 pagesSiva QAsivakanth mPas encore d'évaluation
- Jettty DesignDocument14 pagesJettty DesignNnamani ajPas encore d'évaluation
- Aalco StocklistDocument36 pagesAalco StocklistjsfscibdPas encore d'évaluation
- IRDADocument26 pagesIRDANikhil JainPas encore d'évaluation