Vous aimerez peut-être aussi
- Courier LetterDocument1 pageCourier LetterRamkumar KumarPas encore d'évaluation
- New Application For Surrender of Policy 151212 (CTFN)Document2 pagesNew Application For Surrender of Policy 151212 (CTFN)Ramkumar KumarPas encore d'évaluation
- New Application For Surrender of Policy 151212 (CTFN)Document2 pagesNew Application For Surrender of Policy 151212 (CTFN)Ramkumar KumarPas encore d'évaluation
- Munna ProjetDocument90 pagesMunna ProjetRamkumar KumarPas encore d'évaluation
- DNDocument1 pageDNRamkumar KumarPas encore d'évaluation
- A Rocket For Manned LunarDocument8 pagesA Rocket For Manned LunarRamkumar KumarPas encore d'évaluation
- A Device For Automatically TrackingDocument3 pagesA Device For Automatically TrackingRamkumar KumarPas encore d'évaluation
- DNDocument1 pageDNRamkumar KumarPas encore d'évaluation
- Munna ProjetDocument90 pagesMunna ProjetRamkumar KumarPas encore d'évaluation
- KurlonDocument9 pagesKurlonRohit AdiviPas encore d'évaluation
- Exam Schedule For 2012 13Document2 pagesExam Schedule For 2012 13IGNOU MCA STUDENTS' FORUMPas encore d'évaluation
- Bank ExamsDocument4 pagesBank ExamsRamkumar KumarPas encore d'évaluation
- Bharat Earth Movers LTD (BEML)Document24 pagesBharat Earth Movers LTD (BEML)Ramkumar KumarPas encore d'évaluation
- Self Awareness: Knowing One's Own Attitudes-Opinion Feelings - Emotion Motives - Purpose Desires - NeedsDocument44 pagesSelf Awareness: Knowing One's Own Attitudes-Opinion Feelings - Emotion Motives - Purpose Desires - NeedsVidya SagarPas encore d'évaluation
- Introduction To The StudyDocument24 pagesIntroduction To The StudyRamkumar KumarPas encore d'évaluation
- G 100917Document1 pageG 100917Ramkumar KumarPas encore d'évaluation
- Basic Concepts of Supply Chain ManagementDocument21 pagesBasic Concepts of Supply Chain ManagementRamkumar KumarPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Fusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemDocument9 pagesFusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemIAES IJAIPas encore d'évaluation
- Laplace Transforms and S-Domain Circuit AnalysisDocument9 pagesLaplace Transforms and S-Domain Circuit AnalysisAlyoNovakPas encore d'évaluation
- U6 L2 Multichannel Transmission TechniquesRF Over Fiber1Document4 pagesU6 L2 Multichannel Transmission TechniquesRF Over Fiber1Pratiwi Kusumawardani Ji-WeePas encore d'évaluation
- Apx400 4MDocument16 pagesApx400 4MJohnny MahechaPas encore d'évaluation
- Filtering and Edge Detection 2Document88 pagesFiltering and Edge Detection 2Kom ChegPas encore d'évaluation
- CSM 12Document16 pagesCSM 12Michel BeauregardPas encore d'évaluation
- Filteri Rad MatDocument19 pagesFilteri Rad MatPaulo Diego AguileraPas encore d'évaluation
- AKC6955 Stereo FM / TV / MW / SW / LW Digital Tuning Radio: Application Device OverviewDocument19 pagesAKC6955 Stereo FM / TV / MW / SW / LW Digital Tuning Radio: Application Device OverviewLucía MitchellPas encore d'évaluation
- BBC Research Goodmans 'Maxim' Loudspeaker 1965-09Document10 pagesBBC Research Goodmans 'Maxim' Loudspeaker 1965-09Грегори РобертPas encore d'évaluation
- 1960 IRE Transactions on Matched FiltersDocument19 pages1960 IRE Transactions on Matched Filtersbalaji_gawalwad9857Pas encore d'évaluation
- Analysis and Simulation of Biquad Filters Using LTSPICEDocument22 pagesAnalysis and Simulation of Biquad Filters Using LTSPICE2K19/EE/259 TUSHARPas encore d'évaluation
- Noise Temperature in Low Noise AmplifierDocument6 pagesNoise Temperature in Low Noise AmplifierIrum SabaPas encore d'évaluation
- Bose Panaray 502Document4 pagesBose Panaray 502ipad 64 GBPas encore d'évaluation
- One Mark Questions:: EC431 Digital Signal Processing Unit-IIDocument3 pagesOne Mark Questions:: EC431 Digital Signal Processing Unit-IIUday Kiran MuddanaPas encore d'évaluation
- Modeling and Solution of Complex Linear Systems Using MatricesDocument6 pagesModeling and Solution of Complex Linear Systems Using MatricesSahil BhattPas encore d'évaluation
- Using Dspic30F A/D Converters and The DSP Library For Signal FilteringDocument4 pagesUsing Dspic30F A/D Converters and The DSP Library For Signal FilteringManoj kumarPas encore d'évaluation
- Analysis of PCGDocument7 pagesAnalysis of PCGMidhun DPas encore d'évaluation
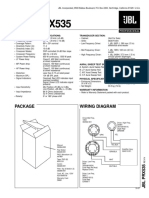
- PRX535 JBLDocument2 pagesPRX535 JBLalexnder gallego100% (1)
- Transistor Active High Pass Filter Electronics NotesDocument2 pagesTransistor Active High Pass Filter Electronics NotesRenato DeákPas encore d'évaluation
- Altec Lansing Voice of The Theater A7 ManualDocument8 pagesAltec Lansing Voice of The Theater A7 ManualGlock20Pas encore d'évaluation
- UAF42 Filtro NotchDocument15 pagesUAF42 Filtro NotchJuan Jose ArrietaPas encore d'évaluation
- Ac '97 Soundmax Codec Ad1981B: Ac '97 2.3 Compatible Features Enhanced FeaturesDocument32 pagesAc '97 Soundmax Codec Ad1981B: Ac '97 2.3 Compatible Features Enhanced FeaturesakshayhebbalPas encore d'évaluation
- Decaying DC Offset Removal Operator Using Mathematical Morphology For Phasor MeasurementDocument6 pagesDecaying DC Offset Removal Operator Using Mathematical Morphology For Phasor Measurementsirisiri100Pas encore d'évaluation
- Syllabus Ee 4361 Summer 04Document1 pageSyllabus Ee 4361 Summer 04akshay_rattan1818Pas encore d'évaluation
- D S PDocument5 pagesD S PShashi YadavPas encore d'évaluation
- Adaptive Filters-3Document18 pagesAdaptive Filters-3deepaPas encore d'évaluation
- Dat TGD71 en A2Document2 pagesDat TGD71 en A2naisha 2035Pas encore d'évaluation
- The Ten Commandments of Digital ControlDocument14 pagesThe Ten Commandments of Digital ControlHüseyin Murat PolaterPas encore d'évaluation
- Ic-F40g F41 MPT PDFDocument38 pagesIc-F40g F41 MPT PDFanselmoPas encore d'évaluation
- Modrob ProposalDocument5 pagesModrob Proposalmkumar_234155Pas encore d'évaluation