Vous aimerez peut-être aussi
- PWM Inverter ThesisDocument5 pagesPWM Inverter Thesisfc33r464100% (2)
- Electrical Design Checklist v1.2Document39 pagesElectrical Design Checklist v1.2huangjlPas encore d'évaluation
- CV - Parisi - UChileDocument5 pagesCV - Parisi - UChileFen_udechilePas encore d'évaluation
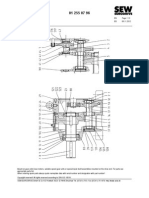
- Parts List 01 255 07 96: Helical Gear Unit R107Document3 pagesParts List 01 255 07 96: Helical Gear Unit R107Parmasamy Subramani50% (2)
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiPas encore d'évaluation
- Field Oriented Control of An Induction Machine With DC Link and Load Disturbance RejectionDocument7 pagesField Oriented Control of An Induction Machine With DC Link and Load Disturbance RejectionKUNDANLANSPas encore d'évaluation
- A New Control Technique FDocument8 pagesA New Control Technique Fpixelo09Pas encore d'évaluation
- Speed Control of DC MotorDocument14 pagesSpeed Control of DC MotorAMARNATHNAIDU77Pas encore d'évaluation
- Abhi GnaDocument83 pagesAbhi Gnasai raparthiPas encore d'évaluation
- Paper 15Document13 pagesPaper 15RakeshconclavePas encore d'évaluation
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocument5 pagesSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraPas encore d'évaluation
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiPas encore d'évaluation
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranPas encore d'évaluation
- New Multilevel Inverter Topology With Reduced Number of SwitchesDocument6 pagesNew Multilevel Inverter Topology With Reduced Number of SwitchesVikram PrasadPas encore d'évaluation
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourPas encore d'évaluation
- 2003 05 A Linear High Voltage High Power Amplifier For Use With Piezoelectric ActuatorsDocument6 pages2003 05 A Linear High Voltage High Power Amplifier For Use With Piezoelectric ActuatorsWaqas AyubPas encore d'évaluation
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Cor ZineDocument9 pagesCor ZineStephen BridgesPas encore d'évaluation
- Modern Online Testing of Induction Motors For Predictive Maintenance and MonitoringDocument7 pagesModern Online Testing of Induction Motors For Predictive Maintenance and MonitoringJonas BorgesPas encore d'évaluation
- Varistor4 PDFDocument19 pagesVaristor4 PDFFari PratomosiwiPas encore d'évaluation
- A Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorDocument8 pagesA Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorPhạm Ngọc QuânPas encore d'évaluation
- Cascaded 5-Level Inverter Type Dstatcom For Power Quality ImprovementDocument5 pagesCascaded 5-Level Inverter Type Dstatcom For Power Quality ImprovementSiri SarojaPas encore d'évaluation
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorSrinivasAnchalaPas encore d'évaluation
- Calculation of TmsDocument6 pagesCalculation of TmsMihir PatelPas encore d'évaluation
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiPas encore d'évaluation
- Computer Based Harmonic Simulation and Testing Phase Distance Relay With Phase Locator. TDocument8 pagesComputer Based Harmonic Simulation and Testing Phase Distance Relay With Phase Locator. TJohari Zhou Hao LiPas encore d'évaluation
- Maquinas de Corriente ContinuaDocument111 pagesMaquinas de Corriente ContinuaValentina Alzugaray BatallaPas encore d'évaluation
- Control Dynamic Induction Voltage: Methods For Good Performance Drives Measured QuantitiesDocument8 pagesControl Dynamic Induction Voltage: Methods For Good Performance Drives Measured QuantitiesPraful YadavPas encore d'évaluation
- Multilevel Optimal Predictive Dynamic Voltage RestorerDocument14 pagesMultilevel Optimal Predictive Dynamic Voltage RestorerChikha SaidPas encore d'évaluation
- A High-Efficiency 6.78-Mhz Full Active Rectifier With Adaptive Time Delay Control For Wireless Power TransmissionDocument10 pagesA High-Efficiency 6.78-Mhz Full Active Rectifier With Adaptive Time Delay Control For Wireless Power Transmissionfelix_007_villedaPas encore d'évaluation
- Boost Inverter Circuit With A Coupled Inductor Using Renewable Energy SourceDocument8 pagesBoost Inverter Circuit With A Coupled Inductor Using Renewable Energy SourceAnonymous qSgOUqPas encore d'évaluation
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulPas encore d'évaluation
- Double Tail Dynamic CompDocument10 pagesDouble Tail Dynamic CompBhura AnushaPas encore d'évaluation
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsPas encore d'évaluation
- MV Circuit Breaker or Vacuum Contactor Part 1Document2 pagesMV Circuit Breaker or Vacuum Contactor Part 1hashimelecPas encore d'évaluation
- Expanded Slip Limits in Double Fed Asynchronous Generator SystemDocument5 pagesExpanded Slip Limits in Double Fed Asynchronous Generator SystemJohnny4JohnnyPas encore d'évaluation
- MV Industrial VSDDocument7 pagesMV Industrial VSDONILEDA1970Pas encore d'évaluation
- Development of Switchable Transformer Research at University of South AustraliaDocument6 pagesDevelopment of Switchable Transformer Research at University of South AustraliaMark BondPas encore d'évaluation
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviPas encore d'évaluation
- Abstracts TotalDocument232 pagesAbstracts TotalhaleemforyouPas encore d'évaluation
- Fuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemDocument7 pagesFuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemBhuvneshRathorePas encore d'évaluation
- Massachusetts Institute of TechnologyDocument12 pagesMassachusetts Institute of TechnologyPrakhar PandeyPas encore d'évaluation
- Definition: In: o o o oDocument4 pagesDefinition: In: o o o orevurevathiPas encore d'évaluation
- Erlich 2011 ADocument7 pagesErlich 2011 AsubasratnaPas encore d'évaluation
- ExtraDocument6 pagesExtraRaja SekarPas encore d'évaluation
- Integrated Starter GeneratorDocument9 pagesIntegrated Starter GeneratorThanh NgaPas encore d'évaluation
- Critical Bandwidth For The Load Transient Response of VRMDocument8 pagesCritical Bandwidth For The Load Transient Response of VRMharis13harisPas encore d'évaluation
- Limite Reactiva DFIGDocument9 pagesLimite Reactiva DFIGMartin__PringlePas encore d'évaluation
- Discontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationDocument13 pagesDiscontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationarunkmepesPas encore d'évaluation
- Iaetsd-Minimization of Voltage Sags and Swells Using DVRDocument8 pagesIaetsd-Minimization of Voltage Sags and Swells Using DVRiaetsdiaetsdPas encore d'évaluation
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document9 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationPas encore d'évaluation
- CMC e Sobretensões - Leggate (1998)Document10 pagesCMC e Sobretensões - Leggate (1998)AndréPas encore d'évaluation
- Speed Control of Multilevel Inverter-Based Induction Motor Using V/F MethodDocument13 pagesSpeed Control of Multilevel Inverter-Based Induction Motor Using V/F MethodIzza AnshoryPas encore d'évaluation
- Capability Chart For Generator-Transformer UnitsDocument4 pagesCapability Chart For Generator-Transformer UnitsFreddy TamayoPas encore d'évaluation
- Scaling, Power, and The Future of CMOSDocument7 pagesScaling, Power, and The Future of CMOSGovinda Prasad AcharyaPas encore d'évaluation
- Sine Wave Inverter With PICDocument50 pagesSine Wave Inverter With PICmtrapkPas encore d'évaluation
- v42 63Document5 pagesv42 63Bala KumarPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesD'EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Journal Approval WorkflowDocument46 pagesJournal Approval Workflowvarachartered283Pas encore d'évaluation
- FTJ Series Product Guide PDFDocument12 pagesFTJ Series Product Guide PDFJhon SendokPas encore d'évaluation
- Sony NX Series PDFDocument62 pagesSony NX Series PDFMaya Tes0% (1)
- Ferro Manganese Slag PDFDocument2 pagesFerro Manganese Slag PDFDebraPas encore d'évaluation
- 4ghz Low Noise Amplifier For Satellite D ImpDocument5 pages4ghz Low Noise Amplifier For Satellite D ImpAbhishek JajuPas encore d'évaluation
- TranslationsDocument19 pagesTranslationsAnonymous eSi1iZTNGPas encore d'évaluation
- Advance Java Sem 5Document18 pagesAdvance Java Sem 5Gunjan Pratim JadhavPas encore d'évaluation
- EE 303 Tutorial 1Document19 pagesEE 303 Tutorial 1Syama SameekshaPas encore d'évaluation
- 15 Oil Fired Crucible FurnaceDocument2 pages15 Oil Fired Crucible Furnaceudaya kumarPas encore d'évaluation
- Atoll 3.3.2 Technical Reference Guide RadioDocument912 pagesAtoll 3.3.2 Technical Reference Guide Radioratelekoms100% (4)
- Faqs: Instant Credit Card Approval and IssuanceDocument1 pageFaqs: Instant Credit Card Approval and Issuancedaong_84Pas encore d'évaluation
- ToshibaDocument316 pagesToshibaRitesh SharmaPas encore d'évaluation
- Digital Booklet - Oh My My (Deluxe) PDFDocument8 pagesDigital Booklet - Oh My My (Deluxe) PDFMehmet Akif DelibaşPas encore d'évaluation
- 2.0 Intro To Small Basic GraphicsDocument18 pages2.0 Intro To Small Basic GraphicspatoturboPas encore d'évaluation
- Frequency Control On An Island Power System With Evolving Plant MixDocument221 pagesFrequency Control On An Island Power System With Evolving Plant MixKing KingPas encore d'évaluation
- Theta76PrinterUnit EL V1-0Document58 pagesTheta76PrinterUnit EL V1-0MarcelinoMorillasCecilia100% (1)
- Promt MidjourneyDocument2 pagesPromt MidjourneyMarcelo PaixaoPas encore d'évaluation
- Maintenance ManualDocument6 pagesMaintenance ManualHuda LestraPas encore d'évaluation
- A5 MSMD 400WDocument1 pageA5 MSMD 400WInfo PLSPas encore d'évaluation
- Digital Data, Digital SignalDocument8 pagesDigital Data, Digital SignalBastomi Adi NugrohoPas encore d'évaluation
- AcknowledgementDocument4 pagesAcknowledgementPurna GuptaPas encore d'évaluation
- GCCDocument265 pagesGCCzhenguoliPas encore d'évaluation
- Scania TruckAndBus 2023Document403 pagesScania TruckAndBus 2023Piotr ZiąbkowskiPas encore d'évaluation
- Specification For HDPE MANHOLES PDFDocument4 pagesSpecification For HDPE MANHOLES PDFPipeline EngineerPas encore d'évaluation
- Xpulse200t Manual de PartesDocument92 pagesXpulse200t Manual de PartesAthiq Nehman100% (2)
- Search Over 200,000 Products: Firm Grip High Dexterity All Purpose Gloves - LargeDocument4 pagesSearch Over 200,000 Products: Firm Grip High Dexterity All Purpose Gloves - Largehali10Pas encore d'évaluation
- Mohit Soni ReportDocument104 pagesMohit Soni ReportMohitPas encore d'évaluation