Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 1 / 10 sales@stepmotordriver.com
Datasheet-M542H Stepper Motor Driver
1.Introduction
The M542H is an economical microstepping driver based on patented technology of Sunwind. It is
suitable for driving 2-phase and 4-phase hybrid stepping motors. By using the advanced bipolar
constant-current chopping technique, it can output more speed and torque from the same
motor,compared with traditional drivers, such as L/R drivers. Its 3-state current control technology allows
coil currents to be well controlled and with relatively small current ripple, therefore less motor heating is
achieved.
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 2 / 10 sales@stepmotordriver.com
2.Features
Low cost and good high-speed torque
Supply voltage up to +100VDC
Output current up to 4.5A
Pulse frequency up to 300 KHz
3-state current control technology
Suitable for 2-phase and 4-phase motors
Over-voltage and short-circuit protection
Automatic idle-current reduction
16 selectable resolutions
DIP switch current setting with 8
different values
CW/CCW mode available (optional)
Optically isolated input signals
Slim size (118x75.5x33mm)
3.Applications
Applications
Suitable for a wide range of stepping motors from NEMA size 17 to 34. It can be used in various kinds of
machines, such as X-Y tables, labeling machines, laser cutters, engraving machines,pick-place devices,
and so on. Particularly adapt to the applications desired with low vibration,high speed and high precision.
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 3 / 10 sales@stepmotordriver.com
4. Specifications and Operating Environment
Electrical Specifications(Tj=25C)
Parameters
DM542H
Min Typical Max Unit
Output Current 1.00 - 5.00 (3.0 RMS) A
Input Voltage +20 +50 +100 VDC
Logic Signal Current 7.00 10 16 Ma
Pulse input
frequency
0.00 - 300 KHz
PulseWidth 2.50 - - Us
Pulse Voltage 5.00 - 24 VDC
Isolation resistance 500.00 M
Operating Environment and other Specifications
Cooling Natural Cooling or Forced cooling
Operating Environment
Environment Avoid dust,oil fog,conosive gases
Ambient Temperature 0 50
Humidity 40%RH 90%RH
Operatiing Temperature 70 Max
Vibration 5.9m/s2 Max
Storage Temperature -20 65
Weight 280gram(9.9oz)
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 4 / 10 sales@stepmotordriver.com
Mechanical Specifications (unit:mm, 1 inch = 25.4 mm)
Front View Side View
Figure 1: Mechanical specifications
*Recommended to use side mounting for better heat dissipation
Elimination of Heat
Drivers reliable working temperature should be <65, and motor working temperature should be <80;
It is recommended to use automatic idle-current reduction mode, namely current automatically reduce to
60% when motor stops, so as to reduce driver heating and motor heating;
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 5 / 10 sales@stepmotordriver.com
It is recommended to side mounting to maximize heat sink area.
5. Pin Assignment and Description
The M542H has two connectors, connector P1 for control signals connections, and connector P2 for
power and motor connections. The following tables are brief descriptions of the two connectors of the
M542H.
Connector P1 Configurations
Pin Function Details
PUL+(+5V)
Pulse signal: In single pulse pulse/direction) mode, this input represents pulse
signal, effective for each rising or falling edge (set by inside jumpers in JP1);
4-5V when PUL-HIGH, 0-0.5V when PUL-LOW. In double pulse mode (pulse/pulse) , this
input represents clockwise (CW) pulseeffective for high level or low level (set
by inside jumpers in JP1). For reliable response, pulse width should be longer than
1.5 s. Series connect resistors for current-limiting when +12V or +24V used.
PUL-(PUL)
DIR+(+5V)
DIR signal: In single-pulse mode, this signal has low/high voltage
levels,representing two directions of motor rotation; in double-pulse mode (set
by inside jumper J3), this signal is counter-clock (CCW) pulseeffective for high
level or low level (set by inside jumper J1). For reliable motion response, DIR
signal should be ahead of PUL signal by 5 s at least. 4-5V when DIR-HIGH,0-0.5V
when DIR-LOW.
DIR-(DIR)
ENA+(+5V)
Enable signal: This signal is used for enabling/disabling the driver. High level
(NPN control signal, PNP and Differential control signals are on the
contrary,namely Low level for enabling.) for enabling the driver and low level for
disabling the driver. Usually left UNCONNECTED (ENABLED).
ENA-(ENA)
Single pulse and double pulses mode switch
There are two jumpers inside the M542H specifically for switch Single pulse and double pulses mode,as
shown in figure 2. Default setting is Single pulse mode.
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 6 / 10 sales@stepmotordriver.com
Connector P2 Configurations
Pin Function Details
GND DC power ground
+V
DC power supply, 20~100VDC, Including voltage fluctuation
and EMF voltage.
A+,A- Motor Phase A
B+,B- Motor Phase B
Control Signal Connector (P1) Interface
The M542H can accept differential and single-ended input signals (including open-collector and PNP
output). The M542H has 3 optically isolated logic inputs which are located on connector P1 to accept line
driver control signals. These inputs are isolated to minimize or eliminate electrical noises coupled onto
the drive control signals. Recommend use line driver control signals to increase noise immunity of the
driver in interference environments. In the following figures, connections to open-collector and PNP
signals are illustrated.
6. Selecting Microstep Resolution and Driver Output Current
This driver uses an 8-bit DIP switch to set microstep resolution, and motor operating current, as
shown below:
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 7 / 10 sales@stepmotordriver.com
Microstep Resolution Selection
Microstep resolution is set by SW5, 6, 7, 8 of the DIP switch as shown in the following table:
Step Angle Pulse/Rev SW5 SW6 SW7 SW8
0.9 400 ON ON ON ON
0.45 800 ON OFF ON ON
0.225 1600 ON ON OFF ON
0.1125 3200 ON OFF OFF ON
0.05625 6400 ON ON ON OFF
0.028125 12800 ON OFF ON OFF
0.014063 25600 ON ON OFF OFF
0.007031 51200 ON OFF OFF OFF
0.36 1000 OFF ON ON ON
0.18 2000 OFF OFF ON ON
0.072 5000 OFF ON OFF ON
0.036 10000 OFF OFF OFF ON
0.0144 25000 OFF ON ON OFF
0.0072 50000 OFF OFF ON OFF
Current Settings
The first three bits (SW1, 2, 3) of the DIP switch are used to set the dynamic current. Select a setting
closest to your motors required current.
Dynamic Current Setting
Peak current (A) RMS(A) SW1 SW2 SW3
1.50 0.71 on on on
2.00 1.00 off on on
2.40 1.18 on off on
2.80 1.35 off off on
3.20 1.60 on on off
3.70 1.82 off on off
4.20 2.10 on off off
4.50 2.22 off off off
Notes: Due to motor inductance, the actual current in the coil may be smaller than the dynamic current
setting, particularly under high speed condition.
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 8 / 10 sales@stepmotordriver.com
Standstill Current Setting
SW4 is used for this purpose. OFF meaning that the standstill current is set to be half of the selected
dynamic current, and ON meaning that standstill current is set to be the same as the selected dynamic
current.
The current automatically reduced to 60% of the selected dynamic current one second after the last
pulse.Theoretically, this will reduce motor heating to 36% (due to P=I2*R) of the original value. If the
application needs a different standstill current, please contact Sunwind.
Wiring Notes
In order to improve anti-interference performance of the driver, it is recommended to use twisted pair
shield cable.
To prevent noise incurred in PUL/DIR signal, pulse/direction signal wires and motor wires should not be
tied up together. It is better to separate them by at least 10 cm, otherwise the disturbing signals
generated by motor will easily disturb pulse direction signals, causing motor position error, system
instability and other failures.
If a power supply serves several drivers, separately connecting the drivers is recommended instead of
daisy-chaining.
It is prohibited to pull and plug connector P2 while the driver is powered ON, because there is high
current flowing through motor coils (even when motor is at standstill). Pulling or plugging connector P2
with power on will cause extremely high back-EMF voltage surge, which may damage the driver.
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 9 / 10 sales@stepmotordriver.com
7. Typical Connection
A complete stepping system should include stepping motor, stepping driver, power supply and controller
(pulse generator). A typical connection is shown following.
Figure 3: Typical connection
Sunwind Electronics Company Limited.
Add:7th Floor,Block H,Juyin Industrial Park,Ganli Road 1#,Buji,Shenzhen,China.P.C.518112
Homepage:http://www.stepmotordriver.com
Phone:0086 755 86610835 Fax: 0086 755 86610201
Sunwind Electronics Company Ltd.
Stepper Motor Driver:M542H
http://www.stepmotordriver.com 10 / 10 sales@stepmotordriver.com
E-mail:sales@stepmotordriver.com
Vous aimerez peut-être aussi
- Control Servo Motors With JoystickDocument9 pagesControl Servo Motors With Joystickaurumstar20000% (1)
- M542Document3 pagesM542xhaneriPas encore d'évaluation
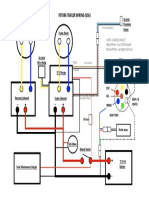
- Futura Trailers - Winch-Box-WiringDocument1 pageFutura Trailers - Winch-Box-Wiringsthollander100% (1)
- HBS86 HDDocument7 pagesHBS86 HDLuis Flores0% (1)
- Motor Shield AdafruitDocument51 pagesMotor Shield AdafruitengrodePas encore d'évaluation
- Using Servo Motors With RPI PDFDocument11 pagesUsing Servo Motors With RPI PDFVictor Alexandru BusnitaPas encore d'évaluation
- Iot Based Smart Irrigation System Using Nodemcu Esp8266 & Adafruit IoDocument6 pagesIot Based Smart Irrigation System Using Nodemcu Esp8266 & Adafruit IoSanthosh Kumar100% (1)
- Arduino-TempHumidity-with-LCD-And-Web-Interface ALLSTEPSDocument12 pagesArduino-TempHumidity-with-LCD-And-Web-Interface ALLSTEPSKurniawan SusiloPas encore d'évaluation
- Cloud Connected Weather Station With The Arduino Yun and TembooDocument12 pagesCloud Connected Weather Station With The Arduino Yun and TembooMiguel Augusto Gutierrez MaldonadoPas encore d'évaluation
- Adafruit Io Basics Temperature and HumidityDocument29 pagesAdafruit Io Basics Temperature and HumiditysyncasterPas encore d'évaluation
- Adafruit CatalogDocument46 pagesAdafruit CataloggregguerreroPas encore d'évaluation
- User Guide - Air Quality Sensor Kit PDFDocument45 pagesUser Guide - Air Quality Sensor Kit PDFMR. TPas encore d'évaluation
- Adafruit Cc3000 WifiDocument56 pagesAdafruit Cc3000 Wifilojain centerPas encore d'évaluation
- Camless Engine: Working of Push Rod EngineDocument14 pagesCamless Engine: Working of Push Rod EngineAkshay Kumar pn AkshayPas encore d'évaluation
- Adafruits Raspberry Pi Lesson 4 Gpio SetupDocument17 pagesAdafruits Raspberry Pi Lesson 4 Gpio SetupJuan BuitragoPas encore d'évaluation
- Adafruit CatalogDocument53 pagesAdafruit CatalogCsaba LangerPas encore d'évaluation
- VEXTA PK Motor Only OverviewDocument21 pagesVEXTA PK Motor Only OverviewHerbert RodriguezPas encore d'évaluation
- Step by Step Procedure FOR Stepper Motor ControlDocument5 pagesStep by Step Procedure FOR Stepper Motor ControlMohd Abdul RahmanPas encore d'évaluation
- Moto 360 Smartwatch Teardown PDFDocument14 pagesMoto 360 Smartwatch Teardown PDFPhone 4uPas encore d'évaluation
- Adafruit - Feather m0 Wifi Atwinc1500Document67 pagesAdafruit - Feather m0 Wifi Atwinc1500Bobby100% (1)
- Jpb2cvse A3 Sheet 01Document1 pageJpb2cvse A3 Sheet 01Juan PastorPas encore d'évaluation
- CNC Interface Board CM101 ManualDocument17 pagesCNC Interface Board CM101 ManualZorica SolunacPas encore d'évaluation
- Spring Loaded GraverDocument1 pageSpring Loaded GraverGeo CpPas encore d'évaluation
- 080544R - Stepper Motor and DriversDocument8 pages080544R - Stepper Motor and DriversAnuruddha WijerathnePas encore d'évaluation
- How To Control Servo Motors With An Arduino and JoystickDocument11 pagesHow To Control Servo Motors With An Arduino and Joystickkangazzam1984Pas encore d'évaluation
- Arduino-Info - ArduinoPower PDFDocument33 pagesArduino-Info - ArduinoPower PDFNc BeanPas encore d'évaluation
- Stepper Motors CatalogDocument35 pagesStepper Motors Catalogapi-3700604100% (1)
- JVL Quickstep BrochureDocument8 pagesJVL Quickstep BrochureElectromate100% (1)
- 5 Axis ManualDocument6 pages5 Axis Manualpfonsecap0% (1)
- Node REDDocument11 pagesNode REDAshwani MauryaPas encore d'évaluation
- Adafruit GFX Graphics LibraryDocument20 pagesAdafruit GFX Graphics LibraryfelixdobrescuPas encore d'évaluation
- Stepper Motor DriverDocument3 pagesStepper Motor Driverfrank_grimesPas encore d'évaluation
- Adafruit Motor Shield PDFDocument54 pagesAdafruit Motor Shield PDFRax ReyPas encore d'évaluation
- Hb860h ManualDocument6 pagesHb860h ManualBayron Ospina MarinPas encore d'évaluation
- Servo Motor Speed and Direction ControlDocument7 pagesServo Motor Speed and Direction Controltazeb100% (1)
- TB6600 Toshiba Datasheet PDFDocument8 pagesTB6600 Toshiba Datasheet PDFArmin SelimovicPas encore d'évaluation
- JVL QuickStep Integrated Stepper Motor MIS34 Up To 9 NMDocument8 pagesJVL QuickStep Integrated Stepper Motor MIS34 Up To 9 NMElectromate100% (2)
- Raspberry Pi Analog To Digital ConvertersDocument21 pagesRaspberry Pi Analog To Digital ConvertersRaviChandraReddyPas encore d'évaluation
- Engineering Vol 56 1893-09-15Document33 pagesEngineering Vol 56 1893-09-15ian_newPas encore d'évaluation
- Stepper Motor Driver DQ542MA DocumentDocument4 pagesStepper Motor Driver DQ542MA DocumentReniePas encore d'évaluation
- Adafruits Raspberry Pi Lesson 4 Gpio Setup PDFDocument15 pagesAdafruits Raspberry Pi Lesson 4 Gpio Setup PDFMardiyah AzzahraPas encore d'évaluation
- Variable Valve Timing Lab ReportDocument14 pagesVariable Valve Timing Lab ReportSyed Imtinan AhmedPas encore d'évaluation
- Valvetronic Engine TechnologyDocument8 pagesValvetronic Engine Technologykaushik kdkPas encore d'évaluation
- Weatherstatiohhhn ThesisDocument49 pagesWeatherstatiohhhn ThesisAmparo RomnickPas encore d'évaluation
- DHT11, DHT22 and AM2302 Sensors: Created by Lady AdaDocument14 pagesDHT11, DHT22 and AM2302 Sensors: Created by Lady AdaLucas Quarchioni100% (1)
- Engine2 Pm63-Sheet-2 PDFDocument1 pageEngine2 Pm63-Sheet-2 PDFCarlos RmzPas encore d'évaluation
- 0903 Taylor TitchDocument3 pages0903 Taylor Titchpor930sche100% (1)
- Adafruit Si5351 Clock Generator BreakoutDocument25 pagesAdafruit Si5351 Clock Generator BreakoutDirson Volmir WilligPas encore d'évaluation
- Gyro Camera For Motorcycle Using ArduinoDocument8 pagesGyro Camera For Motorcycle Using ArduinoCUIDAITOPas encore d'évaluation
- Engineering Vol 56 1893-09-29Document29 pagesEngineering Vol 56 1893-09-29ian_newPas encore d'évaluation
- Raspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)Document27 pagesRaspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)orangota100% (1)
- Pololu - A4988 Stepper Motor Driver CarrierDocument7 pagesPololu - A4988 Stepper Motor Driver CarrierJuan Alberto Casares ZaragozaPas encore d'évaluation
- MD2278 DDocument3 pagesMD2278 Dhoangmanh1989Pas encore d'évaluation
- Makeblock 2H Microstep DriverDocument4 pagesMakeblock 2H Microstep DriverMakeblockPas encore d'évaluation
- Edrive Ma860Document7 pagesEdrive Ma860marcyel Oliveira WoliveiraPas encore d'évaluation
- M542 Stepper Motor DriveDocument8 pagesM542 Stepper Motor DriveElvio JungesPas encore d'évaluation
- Rhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)Document11 pagesRhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)sanjeev kumarPas encore d'évaluation
- Driver M542m para NEMA 23Document8 pagesDriver M542m para NEMA 23Alexander Pulido MarínPas encore d'évaluation
- 25 A 20Document9 pages25 A 20s_barriosPas encore d'évaluation
- Amb 1050 Fme-U / 1050 Fme-U DiDocument2 pagesAmb 1050 Fme-U / 1050 Fme-U DisthollanderPas encore d'évaluation
- ACORN CNC Controller - Rev4 Specifications ManualDocument15 pagesACORN CNC Controller - Rev4 Specifications ManualsthollanderPas encore d'évaluation
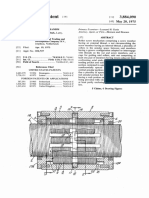
- US Patent 3884090Document5 pagesUS Patent 3884090sthollanderPas encore d'évaluation
- Tormach MicroARC 4th AxisDocument8 pagesTormach MicroARC 4th AxissthollanderPas encore d'évaluation
- Wanhao I3 Unboxing and Hardware Set Up Rev.d PDFDocument11 pagesWanhao I3 Unboxing and Hardware Set Up Rev.d PDFsthollanderPas encore d'évaluation
- Wanhao Quick Guidance REV.ADocument2 pagesWanhao Quick Guidance REV.AsthollanderPas encore d'évaluation
- Avnet Ultra96Document2 pagesAvnet Ultra96sthollanderPas encore d'évaluation
- QNX 2.2 Parts List & Installation NoteDocument2 pagesQNX 2.2 Parts List & Installation NotesthollanderPas encore d'évaluation
- Tribol™ GR CLS 000: DescriptionDocument2 pagesTribol™ GR CLS 000: DescriptionsthollanderPas encore d'évaluation
- Data Sheet of Chiwawa - AR9331 LGA ModuleDocument8 pagesData Sheet of Chiwawa - AR9331 LGA ModulesthollanderPas encore d'évaluation
- Amt 20 Modular Absolute EncoderDocument10 pagesAmt 20 Modular Absolute EncodersthollanderPas encore d'évaluation
- Measurement of The Characteristics of High-Q Ceramic CapacitorsDocument21 pagesMeasurement of The Characteristics of High-Q Ceramic CapacitorsA. VillaPas encore d'évaluation
- Basic TroubleshootingDocument37 pagesBasic TroubleshootingRhea CarilloPas encore d'évaluation
- NOKITADocument27 pagesNOKITAJimmy Morales Jr.Pas encore d'évaluation
- Counters, Ripple Counters, Ring CountersDocument16 pagesCounters, Ripple Counters, Ring CountersAmoga LekshmiPas encore d'évaluation
- CSS Terminating and Connerting Electrical Wiring and Electronic CircuitsDocument19 pagesCSS Terminating and Connerting Electrical Wiring and Electronic CircuitsRalfh Pescadero De GuzmanPas encore d'évaluation
- Ba Computer MCQDocument38 pagesBa Computer MCQraviraj445Pas encore d'évaluation
- CAMEL (Customized Application For The Mobile NetworkDocument21 pagesCAMEL (Customized Application For The Mobile Networkaviblue100% (6)
- Adaptive FilterDocument3 pagesAdaptive FilterAjith Kumar RsPas encore d'évaluation
- DigiEye 3G User Manual 1.20 enDocument177 pagesDigiEye 3G User Manual 1.20 enVietVuongPas encore d'évaluation
- Ifilter DatasheetDocument2 pagesIfilter DatasheetAWR CorporationPas encore d'évaluation
- ATS - DC Couple - System Principle Diagram20191115Document1 pageATS - DC Couple - System Principle Diagram20191115Syed Furqan RafiquePas encore d'évaluation
- JBL PB-10 Service ManualDocument54 pagesJBL PB-10 Service ManualRocio Nava100% (2)
- TimeLord ManualDocument48 pagesTimeLord ManualVarlan DragosPas encore d'évaluation
- b522f Compal LA-8581P PDFDocument60 pagesb522f Compal LA-8581P PDFluix101Pas encore d'évaluation
- Fanuc Field Control™ Genius® Bus Interface UnitDocument248 pagesFanuc Field Control™ Genius® Bus Interface UnitsunhuynhPas encore d'évaluation
- Intermatic dt620 Instructions PDFDocument8 pagesIntermatic dt620 Instructions PDFHerling CaceresPas encore d'évaluation
- VFD Fault DetectionDocument7 pagesVFD Fault DetectionEmmanuel S SombilonPas encore d'évaluation
- Wireless Sensor Networks: Zigbee Stack: Nslab - Ee.ntu - Edu.twDocument25 pagesWireless Sensor Networks: Zigbee Stack: Nslab - Ee.ntu - Edu.twCharu IndoriaPas encore d'évaluation
- POS-PIQ170U - POS-PIB150DT SchematicsDocument75 pagesPOS-PIQ170U - POS-PIB150DT SchematicsAmilcar SilvaPas encore d'évaluation
- Deco E4 (2-Pack) 1.0 - Datasheet PDFDocument4 pagesDeco E4 (2-Pack) 1.0 - Datasheet PDF1coinsidencePas encore d'évaluation
- EMGT102 - Online Activity No. 5inventory Control ModelDocument4 pagesEMGT102 - Online Activity No. 5inventory Control Modelmache dumadPas encore d'évaluation
- PM Checklist For 3G-SitesDocument14 pagesPM Checklist For 3G-SitesAmjad AzeemiPas encore d'évaluation
- Theoretical and Practical Approach To Gnu Radio and Limesdr PlatformDocument6 pagesTheoretical and Practical Approach To Gnu Radio and Limesdr PlatformMarcosZelayaPas encore d'évaluation
- LTE Engineering ParametersDocument7 pagesLTE Engineering ParametersmoslemPas encore d'évaluation
- Digital Communication Ece 304 Assignment-1Document9 pagesDigital Communication Ece 304 Assignment-1ramjee26Pas encore d'évaluation
- 11ak19 For All Models PDFDocument34 pages11ak19 For All Models PDFAdam LiviuPas encore d'évaluation
- 3VM11104EE320AA0 Datasheet enDocument5 pages3VM11104EE320AA0 Datasheet enEverton Pereira HilzendegerPas encore d'évaluation
- Chapter 13 - 2 Energy in Coupled CircuitsDocument17 pagesChapter 13 - 2 Energy in Coupled CircuitsAgung FauziPas encore d'évaluation
- Manual Carman Scan VGDocument138 pagesManual Carman Scan VGDeyvis Fernando Olivos MedinaPas encore d'évaluation
- Ha 17902Document14 pagesHa 17902dubuko100% (1)