Vous aimerez peut-être aussi
- Design and Implementation of PhotovoltaicDocument8 pagesDesign and Implementation of Photovoltaicrostamedastan65Pas encore d'évaluation
- Analog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic ApplicationsDocument6 pagesAnalog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic Applicationstinhmaixatoi2006Pas encore d'évaluation
- Comparative Analysis of MPPT Techniques ForDocument6 pagesComparative Analysis of MPPT Techniques ForPIT_Pas encore d'évaluation
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocument6 pagesA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28Pas encore d'évaluation
- Optimization of MPPT Step Si in Stand-Alone Solar Pumping SystemsDocument6 pagesOptimization of MPPT Step Si in Stand-Alone Solar Pumping SystemssunitharajababuPas encore d'évaluation
- A New Controller Scheme For Photovoltaics PowerDocument10 pagesA New Controller Scheme For Photovoltaics PowerHakan PolatkanPas encore d'évaluation
- Design of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerDocument9 pagesDesign of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerL CHPas encore d'évaluation
- 2 Hill ClimbingDocument6 pages2 Hill ClimbingBillel MadridiPas encore d'évaluation
- Maximum Power Point Tracking AlgorithmsDocument8 pagesMaximum Power Point Tracking AlgorithmsVICTOR UCHEPas encore d'évaluation
- POWERQDocument13 pagesPOWERQKGPas encore d'évaluation
- Content ServerDocument17 pagesContent Serverayoub reseauPas encore d'évaluation
- WSE U6 AnswersDocument3 pagesWSE U6 AnswersOMKAR PATILPas encore d'évaluation
- Dahhani2015 PSO-P&ODocument7 pagesDahhani2015 PSO-P&ODr. Ulaganathan.M, AP /EEEPas encore d'évaluation
- M.tech ThesisDocument59 pagesM.tech ThesisRama Krishna100% (1)
- The Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemDocument14 pagesThe Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemNguyễn Tiến DũngPas encore d'évaluation
- Grid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTDocument6 pagesGrid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTvinay kumarPas encore d'évaluation
- Application of PI and MPPT Controller To DC-DC ConDocument9 pagesApplication of PI and MPPT Controller To DC-DC ConwafaPas encore d'évaluation
- MPPT of PV Module by Conventional Methods 5.1 Perturb and Observe MethodDocument21 pagesMPPT of PV Module by Conventional Methods 5.1 Perturb and Observe MethodGavril GiurgiPas encore d'évaluation
- Point Method The Photovoltaic System: Novel Maximum Power Tracking ForDocument5 pagesPoint Method The Photovoltaic System: Novel Maximum Power Tracking Forramalakshmi_apsPas encore d'évaluation
- V/F Speed Control of SVPWM Based Solar Fed Induction MotorDocument7 pagesV/F Speed Control of SVPWM Based Solar Fed Induction MotorInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Single Sensor Based Photovoltaic Maximum Power Point Tracking Technique For Solar Water Pumping SystemDocument5 pagesSingle Sensor Based Photovoltaic Maximum Power Point Tracking Technique For Solar Water Pumping SystemPogisho LekgethoPas encore d'évaluation
- Paper 04Document6 pagesPaper 04Md ShafiullahPas encore d'évaluation
- Survey and Review PaperDocument9 pagesSurvey and Review Paperdavinder SinghPas encore d'évaluation
- An Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkDocument6 pagesAn Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkOns Zarrad Ep JemaaPas encore d'évaluation
- Impact of Partial Shading On The Output Power of PV Systems Under Partial Shading ConditionsDocument10 pagesImpact of Partial Shading On The Output Power of PV Systems Under Partial Shading Conditionsshihab4806Pas encore d'évaluation
- Content ServerDocument18 pagesContent Serverayoub reseauPas encore d'évaluation
- Adjustable Matched Virtual: Photovoltaic PointDocument5 pagesAdjustable Matched Virtual: Photovoltaic PointChenchu TnvPas encore d'évaluation
- A Single Phase Photovoltaic Inverter Control For Grid Connected SystemDocument16 pagesA Single Phase Photovoltaic Inverter Control For Grid Connected SystemRAMPRASATH EEEPas encore d'évaluation
- Modelling and Simulation of MPPT Control of Grid Connected Inverter For PV SystemDocument15 pagesModelling and Simulation of MPPT Control of Grid Connected Inverter For PV SystemRam Kumar GogadaPas encore d'évaluation
- Maximum Power Point Tracking (MPPT) Controlling AlgorithmsDocument12 pagesMaximum Power Point Tracking (MPPT) Controlling Algorithmsrubon khanPas encore d'évaluation
- Novel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsDocument5 pagesNovel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsSeth HarrisPas encore d'évaluation
- Enhanced Solar PV MPPT System For 12V Battery ChargerDocument8 pagesEnhanced Solar PV MPPT System For 12V Battery ChargerAliXmetecPas encore d'évaluation
- Comparative Study of Incremental Conductance and Perturb & Observe MPPT Methods For Photovoltaic SystemDocument6 pagesComparative Study of Incremental Conductance and Perturb & Observe MPPT Methods For Photovoltaic SystemSahil MittalPas encore d'évaluation
- Pscad PV THDDocument6 pagesPscad PV THDRavishankar KankalePas encore d'évaluation
- Modeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) TechniqueDocument8 pagesModeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) Techniqueeditor9891Pas encore d'évaluation
- Synopsis MPPT Using ArduinoDocument5 pagesSynopsis MPPT Using ArduinoSunnySinghPas encore d'évaluation
- T-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemDocument8 pagesT-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemAdvika SharmaPas encore d'évaluation
- Literature Review On Solar MPPT SystemDocument12 pagesLiterature Review On Solar MPPT SystemSifatSharminPas encore d'évaluation
- Comparison of P&O and Hill Climbing MPPT Methods For Grid-Connected PV ConverterDocument4 pagesComparison of P&O and Hill Climbing MPPT Methods For Grid-Connected PV ConverterMax QuintanillaPas encore d'évaluation
- MPPT SoftDocument42 pagesMPPT Softsonalika.geetasureshPas encore d'évaluation
- Incremental Conductance MPPT Method For PV Systems-LibreDocument3 pagesIncremental Conductance MPPT Method For PV Systems-LibreRushikeshKatkarPas encore d'évaluation
- Design and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTDocument7 pagesDesign and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTskrtamilPas encore d'évaluation
- A Maximum Power Point Tracking System With Parallel Connection For PV Stand-Alone ApplicationsDocument10 pagesA Maximum Power Point Tracking System With Parallel Connection For PV Stand-Alone ApplicationsJidhin JayanPas encore d'évaluation
- Comparative Study of P&O and Inc MPPT AlgorithmsDocument7 pagesComparative Study of P&O and Inc MPPT AlgorithmsAJER JOURNALPas encore d'évaluation
- Control of Grid Connected PV Array Using P&O MPPT AlgorithmDocument7 pagesControl of Grid Connected PV Array Using P&O MPPT AlgorithmHương B DlightPas encore d'évaluation
- Fuzzy Logic Based MPPT For Grid Connected PV SystemsDocument3 pagesFuzzy Logic Based MPPT For Grid Connected PV SystemshellohellokkPas encore d'évaluation
- The Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745Document4 pagesThe Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745SijoypJose VelurPas encore d'évaluation
- Solar Photo Voltaic Water Pumping: Harnessing Maximum PowerDocument8 pagesSolar Photo Voltaic Water Pumping: Harnessing Maximum PowerIDESPas encore d'évaluation
- Solar PVDocument8 pagesSolar PVmurthy237Pas encore d'évaluation
- Highly Efficient Analog Maximum Power Point Tracking (AMPPT) in A Photovoltaic SystemDocument11 pagesHighly Efficient Analog Maximum Power Point Tracking (AMPPT) in A Photovoltaic SystemSusmita PandaPas encore d'évaluation
- A Novel Maximum Power Point Tracking Method For PV Module Integrated Converter Using Square Root FunctionsDocument6 pagesA Novel Maximum Power Point Tracking Method For PV Module Integrated Converter Using Square Root Functionswalidghoneim1970Pas encore d'évaluation
- Modeling and Control of DC-DC Boost Converter Using K-Factor Control For MPPT of Solar PV SystemDocument6 pagesModeling and Control of DC-DC Boost Converter Using K-Factor Control For MPPT of Solar PV SystemHoang ManhPas encore d'évaluation
- Design OF BUCK BOOST CONVERTERDocument11 pagesDesign OF BUCK BOOST CONVERTERmithunprayagPas encore d'évaluation
- Development of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemDocument2 pagesDevelopment of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemulaganathanPas encore d'évaluation
- Performance Evaluation of Maximum Power Point Tracking Algorithm With Buck-Boost DC-DC Converter For Solar PV SystemDocument5 pagesPerformance Evaluation of Maximum Power Point Tracking Algorithm With Buck-Boost DC-DC Converter For Solar PV SystemIJSTEPas encore d'évaluation
- Modelling and Simulation of Hybrid Wind SystemDocument2 pagesModelling and Simulation of Hybrid Wind SystemAkshayHanumantePas encore d'évaluation
- Direct Duty Cycle Control For MPPT Digital ImplementationDocument5 pagesDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngPas encore d'évaluation
- 36 - A New Microcontroller-Based MPPT Algorithm For Photovoltaic AplicationDocument102 pages36 - A New Microcontroller-Based MPPT Algorithm For Photovoltaic AplicationMartin TrujilloPas encore d'évaluation
- Lab 07 UpdatedDocument13 pagesLab 07 Updatedasifa rafiqPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- ANSI MV Recloser Reydisp Training Aid enDocument60 pagesANSI MV Recloser Reydisp Training Aid enlast730Pas encore d'évaluation
- Gis For Electric Transmission PDFDocument4 pagesGis For Electric Transmission PDFAnonymous PzbYdcEzPas encore d'évaluation
- 11 Chapter3Document46 pages11 Chapter3Anonymous wAdxNydjPas encore d'évaluation
- ANSI MV Recloser Reydisp Training Aid enDocument60 pagesANSI MV Recloser Reydisp Training Aid enlast730Pas encore d'évaluation
- Instrument Transformer CVT TransformerDocument6 pagesInstrument Transformer CVT Transformerkajrare_1947Pas encore d'évaluation
- 7SJ66 Manual A7 Us PDFDocument658 pages7SJ66 Manual A7 Us PDFAnonymous PzbYdcEzPas encore d'évaluation
- 5.5 Concentrated Phtovoltaic Thermal Multigeneration B MichelDocument26 pages5.5 Concentrated Phtovoltaic Thermal Multigeneration B MichelAnonymous PzbYdcEzPas encore d'évaluation
- 19 Modeling PDFDocument12 pages19 Modeling PDFAnonymous PzbYdcEzPas encore d'évaluation
- ASTM E903-96 - Solar Heat Gain CoefficientDocument1 pageASTM E903-96 - Solar Heat Gain CoefficientAnonymous PzbYdcEz100% (1)
- 3D PrintingDocument25 pages3D PrintingAnonymous PzbYdcEzPas encore d'évaluation
- 5.5 Concentrated Phtovoltaic Thermal Multigeneration B MichelDocument26 pages5.5 Concentrated Phtovoltaic Thermal Multigeneration B MichelAnonymous PzbYdcEzPas encore d'évaluation
- 05204483Document5 pages05204483Anonymous PzbYdcEzPas encore d'évaluation
- Cooling of Photovoltaic Cells Under Concentrated Illumination - A Criti PDFDocument33 pagesCooling of Photovoltaic Cells Under Concentrated Illumination - A Criti PDFAnonymous PzbYdcEzPas encore d'évaluation
- Tonepad - Rebotedelay PT2399Document1 pageTonepad - Rebotedelay PT2399pepe sanchezPas encore d'évaluation
- Motor Ratings and Qualified Life Issues: Presented By: Bill Newell Schulz Electric CompanyDocument45 pagesMotor Ratings and Qualified Life Issues: Presented By: Bill Newell Schulz Electric CompanyDavid Antonio Córdova LatorrePas encore d'évaluation
- Industrial ElectronicsDocument74 pagesIndustrial ElectronicsAdriano Mercedes Jr. CanoPas encore d'évaluation
- EE 740 Professor Ali Keyhani Lecture #3: Ideal TransformersDocument11 pagesEE 740 Professor Ali Keyhani Lecture #3: Ideal TransformersMohamed A. HusseinPas encore d'évaluation
- Planos 930e-4seDocument38 pagesPlanos 930e-4seDiego Eduardo Astulle AlegrePas encore d'évaluation
- Polycrystalline PV ModulesDocument2 pagesPolycrystalline PV ModulesBujar DalipiPas encore d'évaluation
- 14 Kalak KanawiDocument21 pages14 Kalak KanawikardraPas encore d'évaluation
- DZI Manual - Eng Aneks 2 v20120508 Wersja Z RysDocument16 pagesDZI Manual - Eng Aneks 2 v20120508 Wersja Z RysLý Chính ĐạoPas encore d'évaluation
- 20.8.2020 Class-1Document21 pages20.8.2020 Class-1abhi shekPas encore d'évaluation
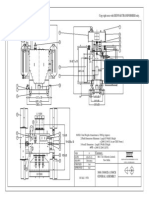
- C & S 3000kVA GA DrgsDocument7 pagesC & S 3000kVA GA DrgsIrshad Khan100% (1)
- 3860 Manual ProjectorDocument17 pages3860 Manual ProjectorBeatriz SanchezPas encore d'évaluation
- NVF2 PDFDocument11 pagesNVF2 PDFErnest ShachipukaPas encore d'évaluation
- GTZ-Windenergy Study-Brazil China India 2007Document394 pagesGTZ-Windenergy Study-Brazil China India 2007shruti_indiaPas encore d'évaluation
- Disconnection NoticeDocument2 pagesDisconnection NoticeAli ParkPas encore d'évaluation
- IncarcatorDocument12 pagesIncarcatorMadalin LazarescuPas encore d'évaluation
- 83d25fef36b1a8165d7c53ab487bcf00Document16 pages83d25fef36b1a8165d7c53ab487bcf00Anonymous hHWOMl4FvPas encore d'évaluation
- Hvi DVR 150 300 Web 2Document1 pageHvi DVR 150 300 Web 2Juli RokhmadPas encore d'évaluation
- Installation and Operational Instructions For Roba - Switch Type 017. - 00.2Document6 pagesInstallation and Operational Instructions For Roba - Switch Type 017. - 00.2Jarosław SkarbekPas encore d'évaluation
- 1MW ProductDocument2 pages1MW Productsmrasteg12Pas encore d'évaluation
- EV CalculationsDocument3 pagesEV Calculationschandra2411Pas encore d'évaluation
- Ppt's Energy Transactions Sem Ix 2020 Post Mid SemDocument82 pagesPpt's Energy Transactions Sem Ix 2020 Post Mid SemDrishti TiwariPas encore d'évaluation
- Technical Schedule: Section - Vi-EDocument7 pagesTechnical Schedule: Section - Vi-EAnonymous 7ZYHilDPas encore d'évaluation
- LS Lpli SMS El V1.8Document2 pagesLS Lpli SMS El V1.8adelgcPas encore d'évaluation
- Pes TR 7-18 0068Document71 pagesPes TR 7-18 0068Subhadeep Paladhi100% (1)
- 1.5.2 Hands Free Link Control Unit Input Test - Replacement - Personal Communications - AccessoriesDocument4 pages1.5.2 Hands Free Link Control Unit Input Test - Replacement - Personal Communications - AccessoriesPdindinPas encore d'évaluation
- Surge Arrester Buyers Guide Edition 6 - Section PEXLIM PDocument7 pagesSurge Arrester Buyers Guide Edition 6 - Section PEXLIM PLuis Gerardo Noy DomínguezPas encore d'évaluation
- Philips Miniwatt Battery Receiving TubesDocument75 pagesPhilips Miniwatt Battery Receiving TubesFlyForFunPas encore d'évaluation
- Sylvania Fluorescent Lifeline Lamps Brochure 7-1962Document6 pagesSylvania Fluorescent Lifeline Lamps Brochure 7-1962Alan MastersPas encore d'évaluation
- ABB - 1SFA898111R7000 pstx170 600 70 Softstarter - Datasheet PDFDocument3 pagesABB - 1SFA898111R7000 pstx170 600 70 Softstarter - Datasheet PDFandri putrantoPas encore d'évaluation