Vous aimerez peut-être aussi
- Engineering and Scientific Computations Using MATLABD'EverandEngineering and Scientific Computations Using MATLABPas encore d'évaluation
- Curve Ncy Clop 09Document30 pagesCurve Ncy Clop 09smithap_ullalPas encore d'évaluation
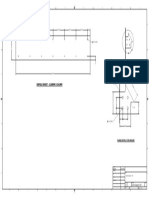
- Unfold Sheet - 2150Mm X 341Mm: Flange Detail To Be WeldedDocument1 pageUnfold Sheet - 2150Mm X 341Mm: Flange Detail To Be WeldedViswa BhuvanPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Overload 5Document1 pageOverload 5elmorseymaPas encore d'évaluation
- Lever 1Document1 pageLever 1balasubramani krishnamurthiPas encore d'évaluation
- Curvature Formulas For Implicit Curves and Surfaces: Computer Aided Geometric Design October 2005Document28 pagesCurvature Formulas For Implicit Curves and Surfaces: Computer Aided Geometric Design October 2005CESAR ERNESTO ROQUE CISNEROSPas encore d'évaluation
- CoreBrace Brochure English 2Document8 pagesCoreBrace Brochure English 2Carlos Eduardo González RamírezPas encore d'évaluation
- Root Locus and Matlab ProgrammingDocument6 pagesRoot Locus and Matlab Programmingshaista00550% (2)
- Worksheet 1.1Document1 pageWorksheet 1.1rudicoPas encore d'évaluation
- Tutorial BezierSpline - English - V1.2Document20 pagesTutorial BezierSpline - English - V1.2arnav saikiaPas encore d'évaluation
- Ribwithplate PDFDocument1 pageRibwithplate PDFDesignPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajPas encore d'évaluation
- Design of Composite Bridge: Project: Assignment No # 1Document3 pagesDesign of Composite Bridge: Project: Assignment No # 1simon maaaklaPas encore d'évaluation
- 34 - Wheel Support Assembly FinalDocument1 page34 - Wheel Support Assembly Finaladmam jonesPas encore d'évaluation
- 2400HC DS 1Document3 pages2400HC DS 1Soup PongsakornPas encore d'évaluation
- Propuesta Del Proyecto FinalDocument4 pagesPropuesta Del Proyecto FinalFranklin JoelPas encore d'évaluation
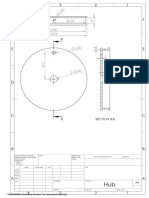
- Drawing - Hub Tension Ring 67BE08Document3 pagesDrawing - Hub Tension Ring 67BE08Rizki MWPas encore d'évaluation
- Magnetic Sensor: FeaturesDocument1 pageMagnetic Sensor: FeaturesSaraPas encore d'évaluation
- MSK 500-1 (Sensor) - NoRestrictionDocument1 pageMSK 500-1 (Sensor) - NoRestrictionЕвгений ТокаревPas encore d'évaluation
- Roxas - MEng142 - Assignment Sheet 1Document1 pageRoxas - MEng142 - Assignment Sheet 1Luis Manuel RoxasPas encore d'évaluation
- WritingDocument3 pagesWritingDr. G. C. Vishnu Kumar Assistant Professor III - AEROPas encore d'évaluation
- Catalogo - 2014 High LightsDocument30 pagesCatalogo - 2014 High LightsDicr RssPas encore d'évaluation
- Elips AnimasiDocument4 pagesElips Animasisri.ukm08100% (2)
- TP5 - Castro Juan MartinDocument1 pageTP5 - Castro Juan MartinJuan Martín CastroPas encore d'évaluation
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)nugraha desainPas encore d'évaluation
- 4.2 Thru All 5 X 90°, Near Side M5 Thru All 6 X 2 X 5 H7/n6 10Document3 pages4.2 Thru All 5 X 90°, Near Side M5 Thru All 6 X 2 X 5 H7/n6 10jaelani sidikPas encore d'évaluation
- F4 - TMD - KEP SLAB BOUNDARY PKr1Document18 pagesF4 - TMD - KEP SLAB BOUNDARY PKr1MOEK CHANTHAPas encore d'évaluation
- Relate Tables, Graphs, and Equations: BatchesDocument2 pagesRelate Tables, Graphs, and Equations: Batchesahmeeeeeeeeee.expmdPas encore d'évaluation
- ME 404 Industrial Engineering FS QPDocument1 pageME 404 Industrial Engineering FS QPJithin's artPas encore d'évaluation
- Febe1002a Engineering Drawing Assignment - 2024Document5 pagesFebe1002a Engineering Drawing Assignment - 2024mjmogau772Pas encore d'évaluation
- YAKO Close Loop Motor and DriveDocument1 pageYAKO Close Loop Motor and DriveAnonymous m36V0bvzPas encore d'évaluation
- Launch Load Test - Circular SupportDocument1 pageLaunch Load Test - Circular SupportPrabakaran BalasubramaniamPas encore d'évaluation
- 2400 LC DS 1Document3 pages2400 LC DS 1Soup PongsakornPas encore d'évaluation
- Form Deplection Crank ShaftDocument1 pageForm Deplection Crank ShaftDenis Irwin MaulanaPas encore d'évaluation
- 2019.08.01 - A04 - Plan MANSARDA - A2L - v01Document1 page2019.08.01 - A04 - Plan MANSARDA - A2L - v01ionuPas encore d'évaluation
- TOWNHOUSEDocument1 pageTOWNHOUSEMark Nathan Sta. MonicaPas encore d'évaluation
- GraphsDocument1 pageGraphsManish Kumar AnandPas encore d'évaluation
- LugelaDocument4 pagesLugelafeliciano soaresPas encore d'évaluation
- Wren Minibike PlansDocument1 pageWren Minibike PlansANDRES MARCELO GORDON GARCESPas encore d'évaluation
- WEG CWB Flyer 50098598 enDocument2 pagesWEG CWB Flyer 50098598 enLuciano DreyPas encore d'évaluation
- PH D Jury PresentationDocument13 pagesPH D Jury Presentationsai nallaPas encore d'évaluation
- MPDC Office: Ground Floor PlanDocument1 pageMPDC Office: Ground Floor PlanNathaniel DadapPas encore d'évaluation
- 121BT0024 Assignment 8-Model1Document1 page121BT0024 Assignment 8-Model1Tinku SainiPas encore d'évaluation
- Projectile ExampleDocument2 pagesProjectile ExampleMani SainiPas encore d'évaluation
- ICG WebsterDocument32 pagesICG WebsterHugo AlmeidaPas encore d'évaluation
- حامل الربر 230-70Document1 pageحامل الربر 230-70younus elshafeiPas encore d'évaluation
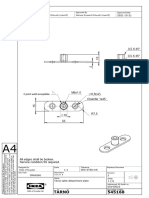
- Notes: 1. Debur 0.2 X 45 2. Unspecific Chamfer 0.5 X 45 3. Unspecific Radius R2Document1 pageNotes: 1. Debur 0.2 X 45 2. Unspecific Chamfer 0.5 X 45 3. Unspecific Radius R2Kiki HardikaPas encore d'évaluation
- Licad86061000006 L10Document1 pageLicad86061000006 L10Sakeel WagirkhanPas encore d'évaluation
- Aa 545168 3Document1 pageAa 545168 3Loc VuPas encore d'évaluation
- Dynapac Soil CompactorsDocument20 pagesDynapac Soil Compactorsjorgemorales416Pas encore d'évaluation
- 01 CR Id Locater AssyDocument1 page01 CR Id Locater Assysiva dhamotharanPas encore d'évaluation
- SOLIDWORKS Educational Product. For Instructional Use OnlyDocument1 pageSOLIDWORKS Educational Product. For Instructional Use Onlyr.magalatiyPas encore d'évaluation
- Imc 1994 2017 OmegalephDocument214 pagesImc 1994 2017 OmegalephCarlos PeterPas encore d'évaluation
- Wideband Array Processing Using A Two-Sided Correlation TransformationDocument13 pagesWideband Array Processing Using A Two-Sided Correlation TransformationSuyash SinghPas encore d'évaluation
- A Note On The Existence of The Multivariate GammaDocument7 pagesA Note On The Existence of The Multivariate GammaAgnes PukaPas encore d'évaluation
- Syllabus of Physics Int MSC MysoreDocument41 pagesSyllabus of Physics Int MSC MysoreredcoatPas encore d'évaluation
- 6DOF Robot ManipulatorDocument18 pages6DOF Robot ManipulatorKarthik DmPas encore d'évaluation
- Sensor Placement Optimization and Damage Identification in A Fuselage Structure Using Inverse Modal Problem and Firefly AlgorithmDocument21 pagesSensor Placement Optimization and Damage Identification in A Fuselage Structure Using Inverse Modal Problem and Firefly AlgorithmrathanPas encore d'évaluation
- Matrix Method For Analysis of Hydraulic NetworksDocument9 pagesMatrix Method For Analysis of Hydraulic NetworksJose2806Pas encore d'évaluation
- Emery y Trist (1965) - Causal Texture PDFDocument14 pagesEmery y Trist (1965) - Causal Texture PDFCORPORACION DENSEL SRLPas encore d'évaluation
- PentominoesNivasch PDFDocument4 pagesPentominoesNivasch PDFmlevilsPas encore d'évaluation
- Maths Assignment 1 PDFDocument2 pagesMaths Assignment 1 PDFShubham GuptaPas encore d'évaluation
- NSSCO Syllabus Math 2018Document36 pagesNSSCO Syllabus Math 2018Tiofelus H. HamutenyaPas encore d'évaluation
- Logarithms and Square Roots of Real Matrices Existence, Uniqueness, and Applications in Medical ImagingDocument44 pagesLogarithms and Square Roots of Real Matrices Existence, Uniqueness, and Applications in Medical ImagingmaxxagainPas encore d'évaluation
- Signal Processing Blockset - For Use With SimulinkDocument129 pagesSignal Processing Blockset - For Use With SimulinkengshimaaPas encore d'évaluation
- Knowledge-Based Systems: Jun Ma, Jumei ShenDocument14 pagesKnowledge-Based Systems: Jun Ma, Jumei ShenReshma KhemchandaniPas encore d'évaluation
- Python For Data AnalysisDocument39 pagesPython For Data Analysiswvargas92650% (2)
- Notes About Numerical Methods With MatlabDocument50 pagesNotes About Numerical Methods With MatlabhugocronyPas encore d'évaluation
- MiningDocument128 pagesMiningPrakash SundharamPas encore d'évaluation
- Klein-Gordon Equation and Dirac Equation: XT Ae Ae AeDocument33 pagesKlein-Gordon Equation and Dirac Equation: XT Ae Ae AeabdoPas encore d'évaluation
- Fortran 90 95 Manual PDFDocument67 pagesFortran 90 95 Manual PDFsayyadmannanPas encore d'évaluation
- KC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDocument17 pagesKC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDarabaGabriellPas encore d'évaluation
- CH 7 Isoparametric Elements 09Document20 pagesCH 7 Isoparametric Elements 09Delyan EryandiPas encore d'évaluation
- Econ 2770 01 F23 HLDocument8 pagesEcon 2770 01 F23 HLibservices2220Pas encore d'évaluation
- UG - R19 - Automobile Engineering - CS & Syllabus 4-1Document29 pagesUG - R19 - Automobile Engineering - CS & Syllabus 4-1Masimukkala SunithaPas encore d'évaluation
- WWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Document3 pagesWWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Anonymous MYbA037ikPas encore d'évaluation
- Sample 11936 PDFDocument16 pagesSample 11936 PDFSaroj KumarPas encore d'évaluation
- Financial Theory and Corporate Policy - CopelandDocument958 pagesFinancial Theory and Corporate Policy - CopelandRafael Alberto Velencia Ramos100% (1)
- Nns PackageDocument46 pagesNns Packagefalla85Pas encore d'évaluation
- ch01 Introduction To Linear Algebra 5th Edition PDFDocument111 pagesch01 Introduction To Linear Algebra 5th Edition PDFTim0% (1)
- CHEAT SHEET - CSEC Mathematics Rev1Document25 pagesCHEAT SHEET - CSEC Mathematics Rev1Aidan KPas encore d'évaluation
- Jnvu Mba SyllabusDocument35 pagesJnvu Mba Syllabusakshita mehtaPas encore d'évaluation