Vous aimerez peut-être aussi
- Aerodynamic Design Considerations and ShapeDocument17 pagesAerodynamic Design Considerations and ShapeJigar SoniPas encore d'évaluation
- Aircraft Drawing - Chap 2 PDFDocument24 pagesAircraft Drawing - Chap 2 PDFnotonectal100% (1)
- An Introduction To Advanced AvionicsDocument4 pagesAn Introduction To Advanced AvionicsJigar Soni100% (1)
- Supersonic (Engine) InletsDocument9 pagesSupersonic (Engine) InletsJigar SoniPas encore d'évaluation
- Double Integration MethodDocument56 pagesDouble Integration MethodJigar Soni88% (8)
- Aircraft Electronics, Microprocessor & ApplicationDocument78 pagesAircraft Electronics, Microprocessor & ApplicationJigar Soni100% (1)
- Electrical Machines and ElectronicsDocument2 pagesElectrical Machines and Electronicsrathorsumit2006Pas encore d'évaluation
- OverviewDocument22 pagesOverviewJigar SoniPas encore d'évaluation
- Unit2 Chemical Bonding QnsDocument5 pagesUnit2 Chemical Bonding QnsArunsethupatPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- AFM Embraer 170 Emergency and Abnormal Procedures 1385 003 FAA SECTION04Document140 pagesAFM Embraer 170 Emergency and Abnormal Procedures 1385 003 FAA SECTION04Vitor Palomanes100% (1)
- This Manual Supersedes TM11 1520 237 23 1, Dated 15 June 1994, Including All ChangesDocument748 pagesThis Manual Supersedes TM11 1520 237 23 1, Dated 15 June 1994, Including All ChangesRodriguez Cristian0% (1)
- What Became of Air New Zealand's B-747's Part 2Document11 pagesWhat Became of Air New Zealand's B-747's Part 2Leonard G MillsPas encore d'évaluation
- FM 5-430!00!2 CHPTR 13 Design and Construction of Heliports and HelipadsDocument32 pagesFM 5-430!00!2 CHPTR 13 Design and Construction of Heliports and HelipadsiscrdmyslfaginPas encore d'évaluation
- TC Exam Study NotesDocument3 pagesTC Exam Study NotesAngelica FilipePas encore d'évaluation
- Bombardier Challenger 605 - Flight InstrumentsDocument60 pagesBombardier Challenger 605 - Flight InstrumentsAnonymous o1NYRvU100% (3)
- 4 PDFDocument1 page4 PDFranickng1Pas encore d'évaluation
- 48 ATPL Advanced Aerodynamics, Performance, and Systems Knowledge (Aeroplane)Document18 pages48 ATPL Advanced Aerodynamics, Performance, and Systems Knowledge (Aeroplane)Mos DetPas encore d'évaluation
- Wing Box DesignDocument7 pagesWing Box DesignArpit SharmaPas encore d'évaluation
- Triunghiul BermudelorDocument3 pagesTriunghiul BermudelorAnonymous ck0aGAqZlPas encore d'évaluation
- Aerial RefuelingDocument13 pagesAerial RefuelingMukesh Karunanethy100% (1)
- AIR Modeller 75 2017-12-20 - 01Document68 pagesAIR Modeller 75 2017-12-20 - 01JoãoGilbertoAraújoPontes100% (4)
- Inlet DesignDocument17 pagesInlet DesignousmanPas encore d'évaluation
- ECQB-PPLA EN GesamtDocument239 pagesECQB-PPLA EN GesamtLesedi MothoaPas encore d'évaluation
- Critical Point CPDocument15 pagesCritical Point CPzest aviationPas encore d'évaluation
- V-22 Osprey - A Tiltrotor AircraftDocument12 pagesV-22 Osprey - A Tiltrotor AircraftHa Nam TranPas encore d'évaluation
- Module 13 - Aircraft Aerodynamics Structures and SystemsDocument8 pagesModule 13 - Aircraft Aerodynamics Structures and SystemsaliPas encore d'évaluation
- Airbus Commercial Aircraft ARFC A300 600 Jun 2007Document17 pagesAirbus Commercial Aircraft ARFC A300 600 Jun 2007Ekta pujaraPas encore d'évaluation
- Singapore Airlines Case StudyDocument19 pagesSingapore Airlines Case StudyAnkitmehra8100% (1)
- Flight Design CTLS - POHDocument137 pagesFlight Design CTLS - POHJoão SantosPas encore d'évaluation
- TYE Insert Cross Reference ListDocument11 pagesTYE Insert Cross Reference ListJesse KrebsPas encore d'évaluation
- Flight Instructors Training Procedures - 43 Airschool VersionDocument333 pagesFlight Instructors Training Procedures - 43 Airschool VersionGeorge Tower100% (2)
- Mea Companion Volume Meeting Workplace RequirementsDocument69 pagesMea Companion Volume Meeting Workplace RequirementsRickyPas encore d'évaluation
- Annex 2 REVISION STATUS OF INSP SCHEDDocument4 pagesAnnex 2 REVISION STATUS OF INSP SCHEDPradeep K sPas encore d'évaluation
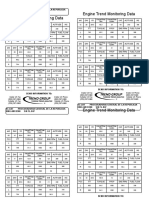
- Engine Trend Monitoring Data Engine Trend Monitoring DataDocument100 pagesEngine Trend Monitoring Data Engine Trend Monitoring Datafrancisco LopezPas encore d'évaluation
- Chapter 5 - High-Speed Flight PDFDocument27 pagesChapter 5 - High-Speed Flight PDFYadanaPas encore d'évaluation
- WW1 Ace - Kurt Wolff (Aviator)Document3 pagesWW1 Ace - Kurt Wolff (Aviator)Jean-pierre NegrePas encore d'évaluation
- Aviation Freighter DirectoryDocument6 pagesAviation Freighter DirectoryNischal KanthPas encore d'évaluation
- AIP INDIA GEN 2.3 - Chart SymbolDocument2 pagesAIP INDIA GEN 2.3 - Chart SymbolitsrijoPas encore d'évaluation
- SYNDICATE 1 - BSEM - FLYBABOO - How High Can FlyDocument20 pagesSYNDICATE 1 - BSEM - FLYBABOO - How High Can FlyMultahadi Qisman100% (2)