Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
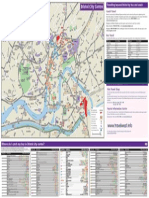
- City Centre Map March14Document1 pageCity Centre Map March14KimByungChulPas encore d'évaluation
- EPOS2 Application Notes Collection enDocument220 pagesEPOS2 Application Notes Collection enKimByungChulPas encore d'évaluation
- EPOS2 P Programmable Positioning Controller DataDocument1 pageEPOS2 P Programmable Positioning Controller DataKimByungChulPas encore d'évaluation
- Composites Modeler For AbaqusCAEDocument10 pagesComposites Modeler For AbaqusCAEKimByungChul0% (1)
- An Experimental Study of In-Plane Large Shear Deformation of Woven Fabric CompositeDocument10 pagesAn Experimental Study of In-Plane Large Shear Deformation of Woven Fabric CompositeKimByungChulPas encore d'évaluation
- User ManualDocument108 pagesUser ManualAngelica Escobar MorenoPas encore d'évaluation
- Stanford Research Systems Residual Gas Analyzer - Mass Spectrometer (SRS RGA) ManualDocument362 pagesStanford Research Systems Residual Gas Analyzer - Mass Spectrometer (SRS RGA) ManualmichaeljkellyPas encore d'évaluation
- 240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 2 To 250 HPDocument52 pages240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 2 To 250 HPSyed Shahbaz AliPas encore d'évaluation
- Constant Current From CV PDFDocument20 pagesConstant Current From CV PDFxiliantonioPas encore d'évaluation
- ME3011C EngDocument16 pagesME3011C EngInayat HathiariPas encore d'évaluation
- Manual SH Arc-m3-Hub v0400 enDocument20 pagesManual SH Arc-m3-Hub v0400 enhomaPas encore d'évaluation
- Love HM28 ManualDocument16 pagesLove HM28 ManualALEJANDRO IPATZIPas encore d'évaluation
- Control Switches RM Series: Control Switches and Indicating Units 16, 22, 30mm Control Stations 22, 30mmDocument6 pagesControl Switches RM Series: Control Switches and Indicating Units 16, 22, 30mm Control Stations 22, 30mmFabien LebaigneurPas encore d'évaluation
- (1-06) Spesifikasi BTL Shortwave Diathermy + Basic AksesoriDocument2 pages(1-06) Spesifikasi BTL Shortwave Diathermy + Basic AksesoriFardiyan SyafriPas encore d'évaluation
- OM Narada NPFC Series Li Ion 0423 V8Document26 pagesOM Narada NPFC Series Li Ion 0423 V8UnstoppablePas encore d'évaluation
- Chassis Manual From Chap 6Document40 pagesChassis Manual From Chap 6Stephanie PattersonPas encore d'évaluation
- 14315Document35 pages14315suresh_geraldPas encore d'évaluation
- Code of Practice 101Document48 pagesCode of Practice 101s0201228100% (1)
- Apm30h User Guide PDFDocument181 pagesApm30h User Guide PDFKrustytfePas encore d'évaluation
- IEG SAMIO-LV Distribution Substation Monitoring SystemDocument33 pagesIEG SAMIO-LV Distribution Substation Monitoring Systemnicolas.tohme121Pas encore d'évaluation
- Driver Assistance Systems: System Power Supply For Radar Sensors CS520Document2 pagesDriver Assistance Systems: System Power Supply For Radar Sensors CS520Daksh MahajanPas encore d'évaluation
- MID220 Volvo FH Tachograph Fault Codes PDFDocument12 pagesMID220 Volvo FH Tachograph Fault Codes PDFfrank mutalePas encore d'évaluation
- SIPD-1600 - 06 - Section VI - Technical SpecificationsDocument22 pagesSIPD-1600 - 06 - Section VI - Technical Specificationsamjed naamaPas encore d'évaluation
- Um 3561Document3 pagesUm 3561Amudala SaikiranPas encore d'évaluation
- P900RM (En) 05Document242 pagesP900RM (En) 05inclumarhPas encore d'évaluation
- Chinna Naidu Tecnical Seminar PDFDocument19 pagesChinna Naidu Tecnical Seminar PDFKola Pattabhi100% (2)
- Improved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsDocument11 pagesImproved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsKalyan Reddy AnuguPas encore d'évaluation
- Service Manual: Trinitron Color TVDocument46 pagesService Manual: Trinitron Color TVPadmajan YesodharanPas encore d'évaluation
- Nmea Signals Multiplexer Snmea6: Enamor Products Nmea Modules FamilyDocument1 pageNmea Signals Multiplexer Snmea6: Enamor Products Nmea Modules FamilyRadekPas encore d'évaluation
- P63X Technical ManualDocument528 pagesP63X Technical ManualAMIT141183Pas encore d'évaluation
- 054604g0 Op Ackermann Katalog PDFDocument128 pages054604g0 Op Ackermann Katalog PDFABELWALIDPas encore d'évaluation
- Po KeysDocument126 pagesPo Keyszoran066Pas encore d'évaluation
- QP Family Fire Alarm Control Panel: Operating ManualDocument16 pagesQP Family Fire Alarm Control Panel: Operating ManualAlejandro SanchezPas encore d'évaluation
- Air Fryer SilverCrestDocument112 pagesAir Fryer SilverCrestSzabadosMariannaPas encore d'évaluation
- AC Analyses: Excerpted From "The Designer's Guide To SPICE and Spectre" by KundertDocument8 pagesAC Analyses: Excerpted From "The Designer's Guide To SPICE and Spectre" by KundertmursriPas encore d'évaluation