Vous aimerez peut-être aussi
- Realtime Systems Fundamnetals: B. RamamurthyDocument15 pagesRealtime Systems Fundamnetals: B. RamamurthyAdip ChyPas encore d'évaluation
- Google C++ Testing Framework: Running Test Programs: Advanced OptionsDocument18 pagesGoogle C++ Testing Framework: Running Test Programs: Advanced OptionsAdip ChyPas encore d'évaluation
- Val Grind TutorialDocument9 pagesVal Grind TutorialAdip ChyPas encore d'évaluation
- Cse590490 HW2Document5 pagesCse590490 HW2Adip ChyPas encore d'évaluation
- Cse590490 Hw2 SolutionDocument6 pagesCse590490 Hw2 SolutionAdip ChyPas encore d'évaluation
- Dynamic Memory Allocation BasicsDocument33 pagesDynamic Memory Allocation BasicsAdip ChyPas encore d'évaluation
- RtosDocument34 pagesRtosAdip ChyPas encore d'évaluation
- CMOS logic gate design for enhanced aging robustnessDocument5 pagesCMOS logic gate design for enhanced aging robustnessAdip ChyPas encore d'évaluation
- Chapter 4B: The Processor, Part B: Mary Jane IrwinDocument56 pagesChapter 4B: The Processor, Part B: Mary Jane IrwinAdip ChyPas encore d'évaluation
- EE538 HW1 SolutionDocument4 pagesEE538 HW1 SolutionAdip ChyPas encore d'évaluation
- Comparator PDFDocument24 pagesComparator PDFBá Anh ĐàoPas encore d'évaluation
- Lec5a SuppDocument77 pagesLec5a SuppAdip ChyPas encore d'évaluation
- Multicores, Multiprocessors, and P, ClustersDocument51 pagesMulticores, Multiprocessors, and P, ClustersAdip ChyPas encore d'évaluation
- EE538 Digital Comm HW2: Problems 3!2 to 3!%& Due WedDocument1 pageEE538 Digital Comm HW2: Problems 3!2 to 3!%& Due WedAdip ChyPas encore d'évaluation
- Lec 6Document50 pagesLec 6Adip ChyPas encore d'évaluation
- Lec 2 ADocument39 pagesLec 2 AAdip ChyPas encore d'évaluation
- Lec 6Document50 pagesLec 6Adip ChyPas encore d'évaluation
- Lec4a SuppDocument43 pagesLec4a SuppAdip ChyPas encore d'évaluation
- 2 L2 536 2013 8 28 UblDocument40 pages2 L2 536 2013 8 28 UblAdip ChyPas encore d'évaluation
- Lec 4Document131 pagesLec 4Adip ChyPas encore d'évaluation
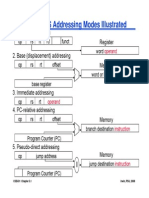
- Review: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryDocument31 pagesReview: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryAdip ChyPas encore d'évaluation
- Lec03 HandoutDocument7 pagesLec03 HandoutAdip ChyPas encore d'évaluation
- Introduction To MicroProcessor-Based ControlDocument33 pagesIntroduction To MicroProcessor-Based ControlDrVikas Singh BhadoriaPas encore d'évaluation
- Arithmetic For ComputersDocument48 pagesArithmetic For ComputersAdip ChyPas encore d'évaluation
- Instructions: Language of The Computer PDocument92 pagesInstructions: Language of The Computer PAdip ChyPas encore d'évaluation
- Lec 1Document57 pagesLec 1Adip ChyPas encore d'évaluation
- ArithmeticDocument13 pagesArithmeticAdip ChyPas encore d'évaluation
- EE 536 Fall2013 SyllabusDocument1 pageEE 536 Fall2013 SyllabusAdip ChyPas encore d'évaluation
- 1 L1 536 2013 8 26 UblDocument33 pages1 L1 536 2013 8 26 UblAdip ChyPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Microprocessor Chapter 1Document73 pagesMicroprocessor Chapter 1Wann FarieraPas encore d'évaluation
- Verawati R. Simbolon Catholic University of Saint Thomas EmailDocument13 pagesVerawati R. Simbolon Catholic University of Saint Thomas Emailvera simbolonPas encore d'évaluation
- Data Entry Operator: Syllabus For The Trade OFDocument10 pagesData Entry Operator: Syllabus For The Trade OFMusaib MuzaffarPas encore d'évaluation
- Analitical ExpositionDocument11 pagesAnalitical ExpositionHeri Maula AkasyahPas encore d'évaluation
- SSD Buying Guide ListDocument18 pagesSSD Buying Guide Listriski arrixki2Pas encore d'évaluation
- IMO 1988 Problem 6Document1 pageIMO 1988 Problem 6Mike JonesPas encore d'évaluation
- The Water Dancer: Ta-Nehisi CoatesDocument44 pagesThe Water Dancer: Ta-Nehisi CoatesDanica Cervantes0% (1)
- Analysis of RhodoraDocument2 pagesAnalysis of Rhodoramudianto miden100% (2)
- DocumentDocument4 pagesDocumentGiacomoLeopardiFavittaPas encore d'évaluation
- Avr EnsambladorDocument24 pagesAvr Ensambladorfabio3055Pas encore d'évaluation
- Protel DXP BeginnersDocument38 pagesProtel DXP BeginnersandreskapazPas encore d'évaluation
- 1 Rounding Decimal Places and Significant FiguresDocument10 pages1 Rounding Decimal Places and Significant Figuresapi-258749062Pas encore d'évaluation
- Discover How To Pick Up Women by Using Attractive Body Language (PDFDrive)Document30 pagesDiscover How To Pick Up Women by Using Attractive Body Language (PDFDrive)Panem NagabhushanamPas encore d'évaluation
- Topic 7: Understanding The Functionality of HTML What Is HTML?Document9 pagesTopic 7: Understanding The Functionality of HTML What Is HTML?Erandi GodamannaPas encore d'évaluation
- Name of The Presenters:: 1. Andreana Puji Fatmala (0203521020) 2. Novia Setyana Khusnul K (0203521015)Document21 pagesName of The Presenters:: 1. Andreana Puji Fatmala (0203521020) 2. Novia Setyana Khusnul K (0203521015)muna zihahPas encore d'évaluation
- Nadzom Pepeling MaotDocument2 pagesNadzom Pepeling MaotArman Nur RokhmanPas encore d'évaluation
- Class Hard TimesDocument3 pagesClass Hard TimesRomina Paola PiñeyroPas encore d'évaluation
- Own Cloud Admin ManualDocument87 pagesOwn Cloud Admin ManualNagraj NagPas encore d'évaluation
- IELTS READING UNIT 2 - Table/Flow-chart Completion QuestionsDocument6 pagesIELTS READING UNIT 2 - Table/Flow-chart Completion QuestionsDuy Phung DucPas encore d'évaluation
- Pcc-Kotbzz8a-C24 Finger and Palm Print FormDocument2 pagesPcc-Kotbzz8a-C24 Finger and Palm Print FormGEOFRY KIRUIPas encore d'évaluation
- ESC Shahadah 2Document14 pagesESC Shahadah 2fatimah.kamal013Pas encore d'évaluation
- Byzantium's Exorcistic Prayer and DemonologyDocument32 pagesByzantium's Exorcistic Prayer and DemonologyFr Jesmond MicallefPas encore d'évaluation
- APA-6 Style Template For MS-WordDocument5 pagesAPA-6 Style Template For MS-WordA4507L44Pas encore d'évaluation
- Learn R by Intensive Practice - Coding TestDocument22 pagesLearn R by Intensive Practice - Coding Testselva86196Pas encore d'évaluation
- Notes Graph Theory 050319Document74 pagesNotes Graph Theory 050319NurFatihah Nadirah Noor AzlanPas encore d'évaluation
- Rexroth SYNAX 200: Troubleshooting GuideDocument112 pagesRexroth SYNAX 200: Troubleshooting GuideKauê Vinicius100% (1)
- IELTS GT Listening sampleDocument2 pagesIELTS GT Listening sampleJohanesTangdiPas encore d'évaluation
- Barcode in Birt ReportsDocument13 pagesBarcode in Birt ReportsGuilherme ResendePas encore d'évaluation
- Graco ACS ModuleDocument44 pagesGraco ACS ModuleRasel Setia Artdian SanjayaPas encore d'évaluation
- Unix PortDocument204 pagesUnix PorthaidqPas encore d'évaluation