Vous aimerez peut-être aussi
- Ann Elman Fcm.19Document11 pagesAnn Elman Fcm.19Boris GreenPas encore d'évaluation
- AI 07 - Chapter 2Document19 pagesAI 07 - Chapter 2Boris GreenPas encore d'évaluation
- AI SpecialstudymastersDocument61 pagesAI SpecialstudymastersBoris GreenPas encore d'évaluation
- SVM Ann 0083Document6 pagesSVM Ann 0083Boris GreenPas encore d'évaluation
- ZZZZZ Example XX 06281687Document8 pagesZZZZZ Example XX 06281687Boris GreenPas encore d'évaluation
- 04433732Document6 pages04433732Boris GreenPas encore d'évaluation
- A Numerical Method For Simulating Discontinuous Shallow Flow Over An Infiltrating SurfaceDocument22 pagesA Numerical Method For Simulating Discontinuous Shallow Flow Over An Infiltrating SurfaceBoris GreenPas encore d'évaluation
- Theory Abt Saint-Venant EquationDocument147 pagesTheory Abt Saint-Venant EquationramakrishnanbalajiPas encore d'évaluation
- Numerical Solution of Flood Routing Model Using Finite Volume MethodsDocument9 pagesNumerical Solution of Flood Routing Model Using Finite Volume MethodsBoris GreenPas encore d'évaluation
- I Macdonald ThesisDocument225 pagesI Macdonald ThesisBoris GreenPas encore d'évaluation
- D 39Document174 pagesD 39Boris GreenPas encore d'évaluation
- ThesisDocument80 pagesThesisBoris GreenPas encore d'évaluation
- 1374Document7 pages1374Boris GreenPas encore d'évaluation
- Mech - Conveyor: Simmechanics, and Then DemosDocument4 pagesMech - Conveyor: Simmechanics, and Then DemosBoris GreenPas encore d'évaluation
- CS 223-B L5a Advanced FeaturesDocument45 pagesCS 223-B L5a Advanced FeaturesBoris GreenPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Actus Reus and Mens Rea New MergedDocument4 pagesActus Reus and Mens Rea New MergedHoorPas encore d'évaluation
- Self-Instructional Manual (SIM) For Self-Directed Learning (SDL)Document28 pagesSelf-Instructional Manual (SIM) For Self-Directed Learning (SDL)Monique Dianne Dela VegaPas encore d'évaluation
- Manual Generador KohlerDocument72 pagesManual Generador KohlerEdrazGonzalezPas encore d'évaluation
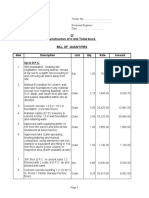
- Type BOQ For Construction of 4 Units Toilet Drawing No.04Document6 pagesType BOQ For Construction of 4 Units Toilet Drawing No.04Yashika Bhathiya JayasinghePas encore d'évaluation
- Reverse Osmosis ProcessDocument10 pagesReverse Osmosis ProcessHeshamPas encore d'évaluation
- MDC PT ChartDocument2 pagesMDC PT ChartKailas NimbalkarPas encore d'évaluation
- To The Owner / President / CeoDocument2 pagesTo The Owner / President / CeoChriestal SorianoPas encore d'évaluation
- MG206 Chapter 3 Slides On Marketing Principles and StrategiesDocument33 pagesMG206 Chapter 3 Slides On Marketing Principles and StrategiesIsfundiyerTaungaPas encore d'évaluation
- Ap06 - Ev04 Taller en Idioma Inglés Sobre Sistema de DistribuciónDocument9 pagesAp06 - Ev04 Taller en Idioma Inglés Sobre Sistema de DistribuciónJenny Lozano Charry50% (2)
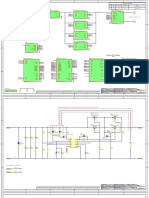
- Scheme Bidirectional DC-DC ConverterDocument16 pagesScheme Bidirectional DC-DC ConverterNguyễn Quang KhoaPas encore d'évaluation
- AdvertisingDocument2 pagesAdvertisingJelena ŽužaPas encore d'évaluation
- Optimization of Crude Oil DistillationDocument8 pagesOptimization of Crude Oil DistillationJar RSPas encore d'évaluation
- 1 075 Syn4e PDFDocument2 pages1 075 Syn4e PDFSalvador FayssalPas encore d'évaluation
- Verma Toys Leona Bebe PDFDocument28 pagesVerma Toys Leona Bebe PDFSILVIA ROMERO100% (3)
- A Perspective Study On Fly Ash-Lime-Gypsum Bricks and Hollow Blocks For Low Cost Housing DevelopmentDocument7 pagesA Perspective Study On Fly Ash-Lime-Gypsum Bricks and Hollow Blocks For Low Cost Housing DevelopmentNadiah AUlia SalihiPas encore d'évaluation
- Medical Devices RegulationsDocument59 pagesMedical Devices RegulationsPablo CzPas encore d'évaluation
- 3.1 Radiation in Class Exercises IIDocument2 pages3.1 Radiation in Class Exercises IIPabloPas encore d'évaluation
- TNCT Q2 Module3cDocument15 pagesTNCT Q2 Module3cashurishuri411100% (1)
- Barangay Tanods and The Barangay Peace and OrderDocument25 pagesBarangay Tanods and The Barangay Peace and OrderKarla Mir74% (42)
- Perhitungan Manual Metode Correlated Naïve Bayes Classifier: December 2020Document6 pagesPerhitungan Manual Metode Correlated Naïve Bayes Classifier: December 2020andreas evanPas encore d'évaluation
- MSEA News, Jan-Feb 2014Document20 pagesMSEA News, Jan-Feb 2014Justin HinkleyPas encore d'évaluation
- U2 - Week1 PDFDocument7 pagesU2 - Week1 PDFJUANITO MARINOPas encore d'évaluation
- SWOT AnalysisDocument6 pagesSWOT AnalysisSSPK_92Pas encore d'évaluation
- Effect of Internet Use To Academic PerformaceDocument4 pagesEffect of Internet Use To Academic PerformaceLeonard R. RodrigoPas encore d'évaluation
- 01 Eh307 Crimpro Case Digests Part 1Document214 pages01 Eh307 Crimpro Case Digests Part 1Kimberly PerezPas encore d'évaluation
- Channel System: Presented byDocument78 pagesChannel System: Presented bygrace22mba22Pas encore d'évaluation
- Troubleshooting For Rb750Glr4: Poe Does Not WorkDocument7 pagesTroubleshooting For Rb750Glr4: Poe Does Not Workjocimar1000Pas encore d'évaluation
- Ss1169 - Telecom Frameworx l1TMFDocument65 pagesSs1169 - Telecom Frameworx l1TMFPrince SinghPas encore d'évaluation
- Software Hackathon Problem StatementsDocument2 pagesSoftware Hackathon Problem StatementsLinusNelson100% (2)
- Qa-St User and Service ManualDocument46 pagesQa-St User and Service ManualNelson Hurtado LopezPas encore d'évaluation