Vous aimerez peut-être aussi
- 200hour Manual 091509Document129 pages200hour Manual 091509costpop93% (14)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- 110 Waveform Generator Projects for the Home ConstructorD'Everand110 Waveform Generator Projects for the Home ConstructorÉvaluation : 4 sur 5 étoiles4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Stand-alone PWM voltage-source inverter design and operationDocument10 pagesStand-alone PWM voltage-source inverter design and operationxenotargetPas encore d'évaluation
- Lithium polymer battery technology guideDocument6 pagesLithium polymer battery technology guidecostpopPas encore d'évaluation
- IEC 61850 Application Examples enDocument48 pagesIEC 61850 Application Examples enEdison Luis Uemoto83% (6)
- Speed Control of Three Phase Induction MotorDocument48 pagesSpeed Control of Three Phase Induction MotorChancy Dash100% (3)
- Circuit Stepper Motor DriverDocument17 pagesCircuit Stepper Motor DriverkalpicoPas encore d'évaluation
- Analog Circuit Design Volume Three: Design Note CollectionD'EverandAnalog Circuit Design Volume Three: Design Note CollectionÉvaluation : 3 sur 5 étoiles3/5 (2)
- Computer Systems Servicing NC Ii: Qualification: Document No. Issued By: Page 1 of 6Document6 pagesComputer Systems Servicing NC Ii: Qualification: Document No. Issued By: Page 1 of 6seph bronPas encore d'évaluation
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097Pas encore d'évaluation
- CCGT SimulatorDocument4 pagesCCGT SimulatorcostpopPas encore d'évaluation
- DR-130 Service ManualDocument38 pagesDR-130 Service ManualRobert/YG2AKR100% (1)
- EHTC Functional DescriptionDocument8 pagesEHTC Functional Descriptionveer_s100% (2)
- FDD Spindle Motor Driver: BA6477FSDocument12 pagesFDD Spindle Motor Driver: BA6477FSismyorulmazPas encore d'évaluation
- ESM740G TiristorDocument2 pagesESM740G Tiristorjosenicolas12000Pas encore d'évaluation
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoPas encore d'évaluation
- LB1824 Motor DriverDocument10 pagesLB1824 Motor Driverwhynot05Pas encore d'évaluation
- Mach Cong Suat Cau H - Lmd18200Document14 pagesMach Cong Suat Cau H - Lmd18200hieuhuech1Pas encore d'évaluation
- 05 - Electro - Hydraulic ControllerDocument7 pages05 - Electro - Hydraulic Controllerwildhoney1979Pas encore d'évaluation
- Iraudamp3 - 120W X 6 Channel Class D Audio Power Amplifier Using IRS20124S and IRF6645Document40 pagesIraudamp3 - 120W X 6 Channel Class D Audio Power Amplifier Using IRS20124S and IRF6645Anonymous R0s4q9X8Pas encore d'évaluation
- 1) Wireless Headphone ReceiverDocument28 pages1) Wireless Headphone ReceiverPetarPetrovicPas encore d'évaluation
- Hef 4752Document9 pagesHef 4752onlyvinod56Pas encore d'évaluation
- APA2000 Switching Power Amplifier Service ManualDocument96 pagesAPA2000 Switching Power Amplifier Service Manualelefantul2005Pas encore d'évaluation
- Railway Accident Monitoring System: A Project Report ONDocument13 pagesRailway Accident Monitoring System: A Project Report ONPrateek SrivastavPas encore d'évaluation
- SonarDocument14 pagesSonarUros SmiljanicPas encore d'évaluation
- DC Motor Speed ControlDocument7 pagesDC Motor Speed ControlSinggih Candra PrayogaPas encore d'évaluation
- LB1823Document12 pagesLB1823oscmanPas encore d'évaluation
- High Power Class D Audio Power Amplifier Using IR2011SDocument22 pagesHigh Power Class D Audio Power Amplifier Using IR2011SAbubakar SidikPas encore d'évaluation
- DeviceCraftDCmotorController 1015BDocument24 pagesDeviceCraftDCmotorController 1015BbetortitaPas encore d'évaluation
- Raychem Instruction ManualDocument17 pagesRaychem Instruction ManualjaikolangaraparambilPas encore d'évaluation
- High Power Class D Audio Amplifier DesignDocument24 pagesHigh Power Class D Audio Amplifier DesignChuYurPas encore d'évaluation
- 4-Channel BTL Driver For CD Players: BA6398FPDocument8 pages4-Channel BTL Driver For CD Players: BA6398FPEduardo PachecoPas encore d'évaluation
- WIRE LESS Land Mine Detection Robo-VehicleDocument35 pagesWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraPas encore d'évaluation
- (212142518) Stepper Motor Control Using MicrocontrollerDocument4 pages(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiPas encore d'évaluation
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocument14 pagesLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiPas encore d'évaluation
- KT60KM06Document2 pagesKT60KM06Luciano DiasPas encore d'évaluation
- Image Rejecting Front-End For GSM Applications UAA2072M: Philips Semiconductors Product SpecificationDocument16 pagesImage Rejecting Front-End For GSM Applications UAA2072M: Philips Semiconductors Product SpecificationAndrey DolgovPas encore d'évaluation
- Technical Feedback EhtcDocument9 pagesTechnical Feedback EhtcPrashant Kumar ChoudharyPas encore d'évaluation
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaPas encore d'évaluation
- Iraudamp1 PDFDocument22 pagesIraudamp1 PDFamijoski6051Pas encore d'évaluation
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Document16 pagesApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaPas encore d'évaluation
- LB 11961Document7 pagesLB 11961Ayala Eduardo La San RamonPas encore d'évaluation
- Raytheon R1206XXDocument70 pagesRaytheon R1206XXtyutyuPas encore d'évaluation
- Data Sheet: TDA8380ADocument21 pagesData Sheet: TDA8380Ajvazquez501Pas encore d'évaluation
- DC-DC Switching Boost ConverterDocument15 pagesDC-DC Switching Boost Converterxbox98Pas encore d'évaluation
- PDFDocument8 pagesPDFanterommxPas encore d'évaluation
- L4981Document23 pagesL4981Robert GabrielPas encore d'évaluation
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielPas encore d'évaluation
- BA5927SDocument10 pagesBA5927SHugo VelozPas encore d'évaluation
- AS3842Document10 pagesAS3842kik020Pas encore d'évaluation
- AKAI - 21CT06FS - Chassis - PX20019 PDFDocument19 pagesAKAI - 21CT06FS - Chassis - PX20019 PDFsertecelecPas encore d'évaluation
- Ha 13563Document18 pagesHa 13563Danh ProPas encore d'évaluation
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocument8 pagesAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckPas encore d'évaluation
- Design and Construction of A Remote Controlled Fan RegulatorDocument9 pagesDesign and Construction of A Remote Controlled Fan RegulatorkaushaletPas encore d'évaluation
- LMD 18200Document14 pagesLMD 18200Itzamary Romero SosaPas encore d'évaluation
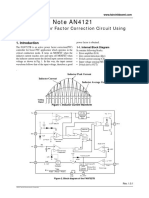
- Application Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BDocument22 pagesApplication Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BRicardo VieiraPas encore d'évaluation
- EE08 Closed Loop Buck Converter.Document4 pagesEE08 Closed Loop Buck Converter.MechWindNaniPas encore d'évaluation
- Iraudamp 1Document22 pagesIraudamp 1luizcpimentaPas encore d'évaluation
- L6565Document18 pagesL6565Sergio Daniel BarretoPas encore d'évaluation
- LMD18201 3A, 55V H-Bridge: General DescriptionDocument8 pagesLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoPas encore d'évaluation
- 555 TimerDocument3 pages555 TimerPraveen KumarPas encore d'évaluation
- Autocad Cap1Document40 pagesAutocad Cap1costpopPas encore d'évaluation
- CERAMIC CAPACITORS TITLEDocument12 pagesCERAMIC CAPACITORS TITLEcostpopPas encore d'évaluation
- Windows Update Standalone Installer in WindowsDocument6 pagesWindows Update Standalone Installer in WindowscostpopPas encore d'évaluation
- Aluminum Electrolytic CapacitorsDocument41 pagesAluminum Electrolytic CapacitorscostpopPas encore d'évaluation
- Pic 16f877a MicrocontrollerDocument222 pagesPic 16f877a MicrocontrollerVijay Raj PuniaPas encore d'évaluation
- Us 4656533Document22 pagesUs 4656533costpopPas encore d'évaluation
- United States Patent (19) : Min (45) Date of Patent: Mar. 10, 1998Document8 pagesUnited States Patent (19) : Min (45) Date of Patent: Mar. 10, 1998costpopPas encore d'évaluation
- LB16203-phase Motor Driver.Document7 pagesLB16203-phase Motor Driver.costpopPas encore d'évaluation
- Lab 11 - Capacitor Start and Capasitor Run MotorsDocument4 pagesLab 11 - Capacitor Start and Capasitor Run MotorscostpopPas encore d'évaluation
- NEC DVD/CD-Rewritable Drive General Specification Model: ND-1300ADocument11 pagesNEC DVD/CD-Rewritable Drive General Specification Model: ND-1300AcostpopPas encore d'évaluation
- Silica Onsemi Lb1846m-DsDocument8 pagesSilica Onsemi Lb1846m-DscostpopPas encore d'évaluation
- Schema CdromDocument7 pagesSchema CdromcostpopPas encore d'évaluation
- 3channel BTL DriverDocument18 pages3channel BTL DrivercostpopPas encore d'évaluation
- Precision DC & Stepper Motor ControllerDocument3 pagesPrecision DC & Stepper Motor ControllercostpopPas encore d'évaluation
- 3-Phase Spindle Motor DriverDocument17 pages3-Phase Spindle Motor DrivercostpopPas encore d'évaluation
- Petri Nets and Industrial ApplicationsDocument17 pagesPetri Nets and Industrial ApplicationscostpopPas encore d'évaluation
- Precision DC & Stepper Motor ControllerDocument3 pagesPrecision DC & Stepper Motor ControllercostpopPas encore d'évaluation
- AN857 BLDC Motor Control Made Easy (Microchip)Document48 pagesAN857 BLDC Motor Control Made Easy (Microchip)Carlos Iván RuedaPas encore d'évaluation
- Motor Driver For CD-ROMsDocument10 pagesMotor Driver For CD-ROMscostpopPas encore d'évaluation
- How To Design, Improve and Implement Data SystemsDocument30 pagesHow To Design, Improve and Implement Data SystemscostpopPas encore d'évaluation
- Istory Evisited: Julian Nott Reprises His Flight Over The Plains of NazcaDocument4 pagesIstory Evisited: Julian Nott Reprises His Flight Over The Plains of NazcacostpopPas encore d'évaluation
- Analysis and Implementation of The IEC 61850 Standard: Eirik Hammer Eilev SivertsenDocument104 pagesAnalysis and Implementation of The IEC 61850 Standard: Eirik Hammer Eilev Sivertsenislamgolac1539Pas encore d'évaluation
- Ultrasonic sensor guideDocument4 pagesUltrasonic sensor guidecostpopPas encore d'évaluation
- CASSIM SoftwareDocument3 pagesCASSIM SoftwarecostpopPas encore d'évaluation
- BWR SimulatorDocument4 pagesBWR SimulatorcostpopPas encore d'évaluation
- Application L6562Document4 pagesApplication L6562betodias30Pas encore d'évaluation
- Panasonic TX-P50U20B, E - Chassis GPF13DEDocument122 pagesPanasonic TX-P50U20B, E - Chassis GPF13DEYoly Rio Ramos100% (1)
- Pti30000 A MSPDocument2 pagesPti30000 A MSPStalin Paul Rodriguez LeonPas encore d'évaluation
- DSPDocument119 pagesDSPVishal SinghPas encore d'évaluation
- RFID Based Toll Collection SystemDocument72 pagesRFID Based Toll Collection SystemGopalkrishnan Nadar67% (3)
- Rangkuman Hasil Uji Test Report Summary: Perangkat (Device) Regulasi (Technical Requirement Regulation)Document17 pagesRangkuman Hasil Uji Test Report Summary: Perangkat (Device) Regulasi (Technical Requirement Regulation)Berezin ConsultingPas encore d'évaluation
- The Veloce Emulator: Laurent VUILLEMIN Platform Compile Software Manager Emulation DivisionDocument36 pagesThe Veloce Emulator: Laurent VUILLEMIN Platform Compile Software Manager Emulation DivisionPhil UrichPas encore d'évaluation
- Ultimate Maritime Radio TesterDocument2 pagesUltimate Maritime Radio TestereminPas encore d'évaluation
- PIC18F66K80 FAMILY Enhanced Flash MCU With ECAN XLP Technology 30009977G PDFDocument598 pagesPIC18F66K80 FAMILY Enhanced Flash MCU With ECAN XLP Technology 30009977G PDFAndresVillaPas encore d'évaluation
- LB2 UCxx x1 Data Sheet EnUS 13828738699Document8 pagesLB2 UCxx x1 Data Sheet EnUS 13828738699PRaoPas encore d'évaluation
- Parts of The Computer SystemDocument14 pagesParts of The Computer SystemAvishek PaulPas encore d'évaluation
- EMI FIlter DesignDocument27 pagesEMI FIlter DesignankurmalviyaPas encore d'évaluation
- 004 - IT700 Y-NET Package Quick Start (IT700-UM-004-R1.0)Document26 pages004 - IT700 Y-NET Package Quick Start (IT700-UM-004-R1.0)chiase83Pas encore d'évaluation
- Tipos de AntenasDocument7 pagesTipos de AntenasDaniel AtiPas encore d'évaluation
- Simatic Ipc847d-En WebDocument5 pagesSimatic Ipc847d-En WebEmir DelicPas encore d'évaluation
- Communication: RS232 - RS485 Converter 7XV57 ApplicationDocument2 pagesCommunication: RS232 - RS485 Converter 7XV57 Applicationavfarzar27Pas encore d'évaluation
- Acer Iconia Tab W500 Pegatron EAB00 SchematicsDocument60 pagesAcer Iconia Tab W500 Pegatron EAB00 SchematicsIIIkwarkaPas encore d'évaluation
- Circuit Mate 9020 - 20 MHZ OscilloscopeDocument11 pagesCircuit Mate 9020 - 20 MHZ OscilloscopedecalusPas encore d'évaluation
- This Is Brochure-Trafo-Auto-Centrado-type-DryDocument1 pageThis Is Brochure-Trafo-Auto-Centrado-type-DryfendynovapamelaPas encore d'évaluation
- Acer x115h x125hDocument2 pagesAcer x115h x125hAnonymous ZmRV6WqPas encore d'évaluation
- Documented Routine and Type Testing For Transformers To IEC 60076 1 PDFDocument1 pageDocumented Routine and Type Testing For Transformers To IEC 60076 1 PDFMando MandoPas encore d'évaluation
- Chapter One Basic Semiconductor Theory: ResistivityDocument11 pagesChapter One Basic Semiconductor Theory: ResistivityYihun TsegayePas encore d'évaluation
- Experiment 1Document2 pagesExperiment 1rahulnevePas encore d'évaluation
- ACS800 ReadmeDocument4 pagesACS800 Readmeyasararafat1Pas encore d'évaluation
- Cisco UCS C460 M4 High-Performance Rack-Mount Server: Spec SheetDocument80 pagesCisco UCS C460 M4 High-Performance Rack-Mount Server: Spec SheetMahmood RobbinsPas encore d'évaluation
- Basics of Computer HardwareDocument73 pagesBasics of Computer HardwareBalaji Rao NPas encore d'évaluation
- Apvee26 C PDFDocument2 pagesApvee26 C PDFСергей МирошниченкоPas encore d'évaluation
- Final Exam Bee4113 Sem 1 200809Document8 pagesFinal Exam Bee4113 Sem 1 200809Kung ChinHanPas encore d'évaluation
- Virtual KeyboardDocument12 pagesVirtual KeyboardAmar PatilPas encore d'évaluation