Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Apollo 10 Lunar Orbit TranscriptsDocument264 pagesApollo 10 Lunar Orbit Transcriptsseanokane100% (2)
- s1 Lxje03a EwdDocument248 pagess1 Lxje03a Ewdjason ferreiraPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- EMS28 User Guide V1 - 5Document7 pagesEMS28 User Guide V1 - 5Anas Basarah100% (1)
- The Basics of Insulation TestingDocument6 pagesThe Basics of Insulation TestingbhpPas encore d'évaluation
- LESSON 7 - Logic InstructionsDocument9 pagesLESSON 7 - Logic Instructionsamae marshallPas encore d'évaluation
- Lecture3 - Three Phase Power Converter Control Strategies For Three Machine TypesDocument26 pagesLecture3 - Three Phase Power Converter Control Strategies For Three Machine Typesthulasi_krishnaPas encore d'évaluation
- VZ01 - LAB - FactoryTalk View Machine Edition and PanelView Plus - Introductory ROKTechED 2015 PDFDocument126 pagesVZ01 - LAB - FactoryTalk View Machine Edition and PanelView Plus - Introductory ROKTechED 2015 PDFPedroPas encore d'évaluation
- Manual Pt122 - Terminal Truck KALMAR NS:6627-6630Document354 pagesManual Pt122 - Terminal Truck KALMAR NS:6627-6630Kevin Leon Izaguirre100% (5)
- IR Remote Controlled Home Automation Using ArduinoDocument10 pagesIR Remote Controlled Home Automation Using Arduinoakshay7573Pas encore d'évaluation
- Efficiency Enhancement of A New Two-Motor Hybrid SystemDocument11 pagesEfficiency Enhancement of A New Two-Motor Hybrid SystemAnchal SaxenaPas encore d'évaluation
- Islam 2017Document5 pagesIslam 2017Anchal SaxenaPas encore d'évaluation
- Morimoto - Expansion of Operating Limits For Permanent Magnet Motor by Current Vector ControlDocument6 pagesMorimoto - Expansion of Operating Limits For Permanent Magnet Motor by Current Vector ControlAnchal SaxenaPas encore d'évaluation
- NdFeB PhysicalProperties of NdFeB MaterialDocument1 pageNdFeB PhysicalProperties of NdFeB MaterialAnchal SaxenaPas encore d'évaluation
- Incentives 2012 ACEEE PosterDocument1 pageIncentives 2012 ACEEE PosterAnchal SaxenaPas encore d'évaluation
- Induction Motor Efficiency MeasurementsDocument7 pagesInduction Motor Efficiency MeasurementsAnchal SaxenaPas encore d'évaluation
- Analysis of 12 Pulse Phase Control AC DC ConverterDocument5 pagesAnalysis of 12 Pulse Phase Control AC DC Converterark1350Pas encore d'évaluation
- Ieee FormatDocument6 pagesIeee Formatnaveednad2003556Pas encore d'évaluation
- Analytical Calculation of The Airgap Flux Density of PM Synchronous MotorsDocument6 pagesAnalytical Calculation of The Airgap Flux Density of PM Synchronous MotorsAnchal SaxenaPas encore d'évaluation
- Protecta II Cat 2Document3 pagesProtecta II Cat 2Ahmad SohailPas encore d'évaluation
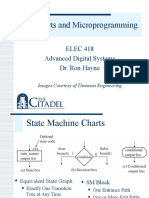
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocument38 pagesSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22Pas encore d'évaluation
- 2 RT2048 Sailor VHF User ManualDocument12 pages2 RT2048 Sailor VHF User ManualUfuk Akgül100% (1)
- AbstractDocument3 pagesAbstractMuhammad MujtabaPas encore d'évaluation
- CS740 A8hDocument10 pagesCS740 A8hPaulo CardosoPas encore d'évaluation
- 1 Megabit (128 K X 8-Bit) CMOS 5.0 Volt-Only, Uniform Sector Flash MemoryDocument31 pages1 Megabit (128 K X 8-Bit) CMOS 5.0 Volt-Only, Uniform Sector Flash MemoryzazarPas encore d'évaluation
- Transfer Fundtion of DC GeneratorDocument5 pagesTransfer Fundtion of DC GeneratorMohammad Haris MPas encore d'évaluation
- AN-012-EN Reduce Acoustic Noise of IS31FL3236 EVB Rev.ADocument4 pagesAN-012-EN Reduce Acoustic Noise of IS31FL3236 EVB Rev.ALászló MondaPas encore d'évaluation
- Three Phase AC Circuit FundamentalsDocument9 pagesThree Phase AC Circuit FundamentalsVikash TiwariPas encore d'évaluation
- Deepsea 701 702 Data SheetDocument2 pagesDeepsea 701 702 Data Sheetzakki ahmadPas encore d'évaluation
- 986K Wheel Loader Electrical System (Cab) 486-0964 Chassis and Engine (486-0965)Document6 pages986K Wheel Loader Electrical System (Cab) 486-0964 Chassis and Engine (486-0965)abduallah muhammadPas encore d'évaluation
- FAB AMT2101 PRELIM MODULE No.1 PDFDocument29 pagesFAB AMT2101 PRELIM MODULE No.1 PDFHanz AlecPas encore d'évaluation
- DP 321Document16 pagesDP 321Salvador Castellanos LeónPas encore d'évaluation
- March 2004 5-1 Work Centre M20 Family Parts ListDocument30 pagesMarch 2004 5-1 Work Centre M20 Family Parts ListYury Kobzar100% (1)
- CNC Usb Controller MK 3Document36 pagesCNC Usb Controller MK 3Keadaan BisaPas encore d'évaluation
- Book 1Document2 808 pagesBook 1Syariefuddin SyahnanPas encore d'évaluation
- Panasonic - KX-TDE100 PBX Install Manual 3Document178 pagesPanasonic - KX-TDE100 PBX Install Manual 3satcomerPas encore d'évaluation
- What Are The Required Subjects To Learn To Become A VLSI Digital IC Engineer - QuoraDocument2 pagesWhat Are The Required Subjects To Learn To Become A VLSI Digital IC Engineer - Quoramahamd saiedPas encore d'évaluation
- 3.8.8 - Lista de Parâmetros Unidrive SPDocument26 pages3.8.8 - Lista de Parâmetros Unidrive SPAnonymous ugCWo0Acz3Pas encore d'évaluation
- MCP2025 LIN Transceiver With Voltage RegulatorDocument36 pagesMCP2025 LIN Transceiver With Voltage RegulatorDeni ShePas encore d'évaluation
- Gateway To PsuDocument1 pageGateway To Psuroyal1414Pas encore d'évaluation