Vous aimerez peut-être aussi
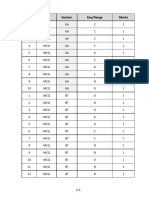
- Q.No. Type Section Key/Range MarksDocument3 pagesQ.No. Type Section Key/Range Marksbiotech_vidhyaPas encore d'évaluation
- BT 2019Document13 pagesBT 2019biotech_vidhyaPas encore d'évaluation
- Facs ProtocolDocument7 pagesFacs ProtocolmisterxPas encore d'évaluation
- Polymerasen GuideDocument16 pagesPolymerasen Guidebiotech_vidhyaPas encore d'évaluation
- Buffer Preparation Guide for DNA/Protein Work (Shi LabDocument6 pagesBuffer Preparation Guide for DNA/Protein Work (Shi Labbiotech_vidhyaPas encore d'évaluation
- Stripping For ReprobingDocument2 pagesStripping For ReprobingStella SalvatorePas encore d'évaluation
- Troubleshooting SDS-PAGE 1Document3 pagesTroubleshooting SDS-PAGE 1biotech_vidhyaPas encore d'évaluation
- Components Reaction MixtureDocument3 pagesComponents Reaction Mixturebiotech_vidhyaPas encore d'évaluation
- Stripping For ReprobingDocument2 pagesStripping For ReprobingStella SalvatorePas encore d'évaluation
- SDS PageDocument2 pagesSDS Pagebiotech_vidhyaPas encore d'évaluation
- Brad FordDocument12 pagesBrad FordQi ChaoPas encore d'évaluation
- Polymerase Chain Reaction (PCR)Document3 pagesPolymerase Chain Reaction (PCR)biotech_vidhyaPas encore d'évaluation
- Ies 17 Set A Me Q ADocument67 pagesIes 17 Set A Me Q Abiotech_vidhyaPas encore d'évaluation
- Whole Cell ExtractDocument1 pageWhole Cell Extractbiotech_vidhyaPas encore d'évaluation
- Buffer Preparation Guide for DNA/Protein Work (Shi LabDocument6 pagesBuffer Preparation Guide for DNA/Protein Work (Shi Labbiotech_vidhyaPas encore d'évaluation
- Befcv List PDFDocument22 pagesBefcv List PDFbiotech_vidhyaPas encore d'évaluation
- Nuclear ExtractsDocument2 pagesNuclear Extractsbiotech_vidhyaPas encore d'évaluation
- TNPSC Group 1 Prelim Book List PDFDocument2 pagesTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaPas encore d'évaluation
- Mechanical Engineering Code No. 14: Combined Competitive (Preliminary) Examination, 2010Document20 pagesMechanical Engineering Code No. 14: Combined Competitive (Preliminary) Examination, 2010biotech_vidhyaPas encore d'évaluation
- TNPSC Group 1 Prelim Book List PDFDocument2 pagesTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaPas encore d'évaluation
- ESE 2017 Mechanical Engineering Prelims Exam Detailed SolutionDocument52 pagesESE 2017 Mechanical Engineering Prelims Exam Detailed SolutionpataPas encore d'évaluation
- TNPSC Group 1 Prelim Book List PDFDocument2 pagesTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaPas encore d'évaluation
- Qpaper PondyDocument21 pagesQpaper Pondybiotech_vidhyaPas encore d'évaluation
- A.E. (Mechanical Engineering I) 2007Document24 pagesA.E. (Mechanical Engineering I) 2007Mukesh KumarPas encore d'évaluation
- Img Word-To PDFDocument3 pagesImg Word-To PDFbiotech_vidhyaPas encore d'évaluation
- Recruitment RulesDocument5 pagesRecruitment Rulesbiotech_vidhyaPas encore d'évaluation
- TDC 41597 A (Mechanical Engg.) - 2012Document20 pagesTDC 41597 A (Mechanical Engg.) - 2012biotech_vidhyaPas encore d'évaluation
- 1 TolerancesDocument1 page1 Tolerancesbiotech_vidhyaPas encore d'évaluation
- Qpaper PondyDocument21 pagesQpaper Pondybiotech_vidhyaPas encore d'évaluation
- Part and Mold Design GuideDocument170 pagesPart and Mold Design GuideminhtintinPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Set-2 Answer? Std10 EnglishDocument13 pagesSet-2 Answer? Std10 EnglishSaiyam JainPas encore d'évaluation
- Optimum Design of Cyclone Separator: SeparationsDocument5 pagesOptimum Design of Cyclone Separator: SeparationsJeyakumar RajaPas encore d'évaluation
- Full Research PaperDocument31 pagesFull Research PaperMeo ĐenPas encore d'évaluation
- Psychological Assessment Chapter 4 - of Tests and Testing PDFDocument7 pagesPsychological Assessment Chapter 4 - of Tests and Testing PDFSam CruzPas encore d'évaluation
- Literary Analysis Essay - Student PacketDocument11 pagesLiterary Analysis Essay - Student Packetapi-2614523120% (1)
- Internship ReportDocument24 pagesInternship ReportFaiz KhanPas encore d'évaluation
- Augustinian Learning Playlist: Ms. Juvelyn A. Abugan English Grade 9Document3 pagesAugustinian Learning Playlist: Ms. Juvelyn A. Abugan English Grade 9Jemar Quezon Lifana100% (2)
- Women &literatureDocument54 pagesWomen &literatureAicha ZianePas encore d'évaluation
- Cityam 2011-09-19Document36 pagesCityam 2011-09-19City A.M.Pas encore d'évaluation
- A Study on Student Budgeting HabitsDocument41 pagesA Study on Student Budgeting Habitsbornak BonalasPas encore d'évaluation
- HRM in InfosysDocument11 pagesHRM in Infosysguptarahul27550% (4)
- Fluid Flow and Kinetics Adam PowellDocument26 pagesFluid Flow and Kinetics Adam PowellSanki KurliPas encore d'évaluation
- Ore Pass Design and Placement Koivisto Mikko PDFDocument105 pagesOre Pass Design and Placement Koivisto Mikko PDFasepdayat100% (1)
- EE6403-Discrete Time Systems and Signal ProcessingDocument17 pagesEE6403-Discrete Time Systems and Signal ProcessingBakru TheenPas encore d'évaluation
- Montes Del Plata Supervisory Training: PTS2Document16 pagesMontes Del Plata Supervisory Training: PTS2sersehPas encore d'évaluation
- History E XDocument13 pagesHistory E XTamboli Shaikh Muaavvir AkbarPas encore d'évaluation
- The Philosophy of EmoDocument2 pagesThe Philosophy of EmoTed RichardsPas encore d'évaluation
- Act 1 Scene 1 Script 1Document3 pagesAct 1 Scene 1 Script 1api-551719156Pas encore d'évaluation
- Comparative Summary of 5 Learning TheoriesDocument2 pagesComparative Summary of 5 Learning TheoriesMonique Gabrielle Nacianceno AalaPas encore d'évaluation
- Certification 5Document10 pagesCertification 5juliet.clementePas encore d'évaluation
- Syllabus Mac1105 M 530 - 8 PM 203080Document6 pagesSyllabus Mac1105 M 530 - 8 PM 203080api-261843361Pas encore d'évaluation
- A Project On Cyber Law 1Document26 pagesA Project On Cyber Law 1Vaishali VermaPas encore d'évaluation
- Sid The Science Kid - The Ruler of Thumb Cd1.avi Sid The Science Kid - The Ruler of Thumb Cd2.aviDocument27 pagesSid The Science Kid - The Ruler of Thumb Cd1.avi Sid The Science Kid - The Ruler of Thumb Cd2.avisheena2saPas encore d'évaluation
- WFISD Agenda Special SessionDocument1 pageWFISD Agenda Special SessionDenise NelsonPas encore d'évaluation
- Petrucci 10th EditionDocument3 pagesPetrucci 10th EditionSheena Dela Peña Timbol11% (9)
- Objective/Multiple Type QuestionDocument14 pagesObjective/Multiple Type QuestionMITALI TAKIAR100% (1)
- 4-23-18 DktEnt 138 Petitions Rehearing Enbanc PDFDocument103 pages4-23-18 DktEnt 138 Petitions Rehearing Enbanc PDFArek FressadiPas encore d'évaluation
- Scitech 101 Course Pack Final Revision Edited 8-11-2021Document111 pagesScitech 101 Course Pack Final Revision Edited 8-11-2021Zendee Jade MaderaPas encore d'évaluation
- Puregold SWOT AnalysisDocument3 pagesPuregold SWOT AnalysisRizza Mae CabigasPas encore d'évaluation
- Bible Study With The LDS MissionaryDocument53 pagesBible Study With The LDS MissionaryBobby E. LongPas encore d'évaluation