Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- ES1022 y Midterm December 2013 With Final AnswersDocument13 pagesES1022 y Midterm December 2013 With Final AnswersGASR2017Pas encore d'évaluation
- Kristian Tlangau - November, 2016 PDFDocument52 pagesKristian Tlangau - November, 2016 PDFMizoram Presbyterian Church SynodPas encore d'évaluation
- Unist MQL Article - ShopCleansUpAct CTEDocument2 pagesUnist MQL Article - ShopCleansUpAct CTEMann Sales & MarketingPas encore d'évaluation
- Gym Mega ForceDocument3 pagesGym Mega ForceAnonymous iKb87OIPas encore d'évaluation
- Booklet ThrusterDocument5 pagesBooklet ThrusterNeo ZaoPas encore d'évaluation
- 15mm K115 GW-S CUP STD (SH005 1014 B)Document2 pages15mm K115 GW-S CUP STD (SH005 1014 B)Ionut BucurPas encore d'évaluation
- Regional VP Sales Director in USA Resume Margo PappDocument2 pagesRegional VP Sales Director in USA Resume Margo PappMargoPappPas encore d'évaluation
- Photometric Design White PaperDocument5 pagesPhotometric Design White PaperScott VokeyPas encore d'évaluation
- Corona ConcernsDocument5 pagesCorona ConcernsIvanPas encore d'évaluation
- ERJ 145 InfoDocument11 pagesERJ 145 InfoMarcus100% (1)
- Radios of America in EnglishDocument3 pagesRadios of America in Englishvitor_pedroPas encore d'évaluation
- T-Spice User's Guide: Release 16.3 June 2015Document579 pagesT-Spice User's Guide: Release 16.3 June 2015Laxmi GuptaPas encore d'évaluation
- SBI Clerk Mains Bolt 2023 OliveboardDocument160 pagesSBI Clerk Mains Bolt 2023 OliveboardMaahi ThakorPas encore d'évaluation
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Document1 pageQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargPas encore d'évaluation
- Nueva Ecija University of Science and Technology Gapan Academic Extension CampusDocument4 pagesNueva Ecija University of Science and Technology Gapan Academic Extension CampusErmercadoPas encore d'évaluation
- Community Needs Assessments and Sample QuestionaireDocument16 pagesCommunity Needs Assessments and Sample QuestionaireLemuel C. Fernandez100% (2)
- Chapter 3 - Well Completion Practices PDFDocument138 pagesChapter 3 - Well Completion Practices PDFchft100% (1)
- Diagnostic Exam Review Phy10Document24 pagesDiagnostic Exam Review Phy10Kayla DollentePas encore d'évaluation
- DELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Document4 pagesDELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Ronnie Ayala SandovalPas encore d'évaluation
- The Impact of Greed On Academic Medicine and Patient CareDocument5 pagesThe Impact of Greed On Academic Medicine and Patient CareBhawana Prashant AgrawalPas encore d'évaluation
- Group 2 (Oacc39)Document3 pagesGroup 2 (Oacc39)viernazanne.viadoPas encore d'évaluation
- AAE 11.3.1 User Guide ClientDocument475 pagesAAE 11.3.1 User Guide Clientme4ias100% (2)
- Move Order APIDocument11 pagesMove Order APIsubbaraocrm100% (3)
- Dr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inDocument4 pagesDr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inshamalac2004Pas encore d'évaluation
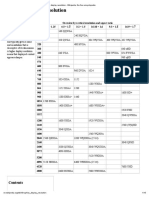
- Graphics Display Resolution - Wikipedia, The Free EncyclopediaDocument15 pagesGraphics Display Resolution - Wikipedia, The Free EncyclopediaKarun KumarPas encore d'évaluation
- Omni III User's Manual Va.1.0-20140124Document130 pagesOmni III User's Manual Va.1.0-20140124Reuel TacayPas encore d'évaluation
- 7ML19981GC61 1Document59 pages7ML19981GC61 1Andres ColladoPas encore d'évaluation
- White BoxDocument9 pagesWhite BoxAmitsonu222Pas encore d'évaluation
- HMA Road Design NotesDocument86 pagesHMA Road Design NotesFarooq AhmadPas encore d'évaluation
- E 321 - 96 - Rtmymq - PDFDocument9 pagesE 321 - 96 - Rtmymq - PDFPrakash MakadiaPas encore d'évaluation