Vous aimerez peut-être aussi
- Lockup Elements - The Timing PerspectiveDocument7 pagesLockup Elements - The Timing PerspectivenirajthakkarPas encore d'évaluation
- Learn FrenchDocument250 pagesLearn FrenchScOrPiQ100% (3)
- NamacaryaHaridasThakura 2017 Ed1Document212 pagesNamacaryaHaridasThakura 2017 Ed1nirajthakkarPas encore d'évaluation
- Touch Screen Controlled Wheel ChairDocument5 pagesTouch Screen Controlled Wheel Chairnirajthakkar100% (2)
- Contents RevisedDocument99 pagesContents RevisedSambit Dash100% (2)
- Electronics Engg - SEDocument48 pagesElectronics Engg - SEnirajthakkarPas encore d'évaluation
- Directorate of Technical Education, Maharashtra State: EN3139 - Vidyalankar Institute of Technology, Wadala, MumbaiDocument7 pagesDirectorate of Technical Education, Maharashtra State: EN3139 - Vidyalankar Institute of Technology, Wadala, MumbainirajthakkarPas encore d'évaluation
- 03 Group Cap Round I AllotmentDocument502 pages03 Group Cap Round I AllotmentnirajthakkarPas encore d'évaluation
- Directorate of Technical Education, Maharashtra State: EN3139 - Vidyalankar Institute of Technology, Wadala, MumbaiDocument7 pagesDirectorate of Technical Education, Maharashtra State: EN3139 - Vidyalankar Institute of Technology, Wadala, MumbainirajthakkarPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Diode Ratings - How To Understand A Diode DatasheetDocument9 pagesDiode Ratings - How To Understand A Diode DatasheetcesarinigillasPas encore d'évaluation
- Second Puc Physics Model Question Paper 2013 New Syllabus - Subject Code: 33Document0 pageSecond Puc Physics Model Question Paper 2013 New Syllabus - Subject Code: 33Prasad C M50% (2)
- Bomba de Vacio Vacuubrand Me2cDocument74 pagesBomba de Vacio Vacuubrand Me2cHector SainzdelaMazaPas encore d'évaluation
- 09-Wien Bridge Oscillator Using OpAmp PDFDocument4 pages09-Wien Bridge Oscillator Using OpAmp PDFVishesh Kumar SinghPas encore d'évaluation
- Damphu Central School Trial Examinations 9 November, Wednesday, 2022Document35 pagesDamphu Central School Trial Examinations 9 November, Wednesday, 2022Prince AndersonPas encore d'évaluation
- Yavorsky Detlaf A Modern Handbook of Physics Mir 1982Document719 pagesYavorsky Detlaf A Modern Handbook of Physics Mir 1982Luka Cristian Mitaš0% (1)
- 113 3 Fluid FlowDocument3 pages113 3 Fluid FlowbaizubirajiPas encore d'évaluation
- Chapter 1: Introduction To Communication Systems: Multiple ChoiceDocument11 pagesChapter 1: Introduction To Communication Systems: Multiple ChoiceReivenPas encore d'évaluation
- Trimmer Ceramic CapDocument46 pagesTrimmer Ceramic CapWickna PratabanPas encore d'évaluation
- Research On Protection Measure For Very Fast Transient Over-Voltage of GISDocument5 pagesResearch On Protection Measure For Very Fast Transient Over-Voltage of GISamir amirPas encore d'évaluation
- Vishay White Sheet For Film CapacitorsDocument8 pagesVishay White Sheet For Film CapacitorsBenjamin DoverPas encore d'évaluation
- Power Estimation Methods For Sequential Logic Circuits: Pedram, M. DespainDocument13 pagesPower Estimation Methods For Sequential Logic Circuits: Pedram, M. DespainHeejung SoPas encore d'évaluation
- S Forty 9erDocument27 pagesS Forty 9erspacefinderPas encore d'évaluation
- Manual Do Usuario L?-V-SD SeriesDocument340 pagesManual Do Usuario L?-V-SD SeriesEdimilson RodriguesPas encore d'évaluation
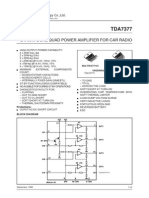
- 2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsDocument10 pages2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsJosé VidalPas encore d'évaluation
- EV2100 Series Variable Speed Drive: User ManualDocument130 pagesEV2100 Series Variable Speed Drive: User ManualRitakristianti RistiantiPas encore d'évaluation
- Catalogue REL670 PDFDocument44 pagesCatalogue REL670 PDFVaibhav kumbharPas encore d'évaluation
- Lm1205/Lm1207 130 Mhz/85 MHZ RGB Video Amplifier System With BlankingDocument24 pagesLm1205/Lm1207 130 Mhz/85 MHZ RGB Video Amplifier System With Blankingblue11111Pas encore d'évaluation
- Insulation CoordinationDocument75 pagesInsulation CoordinationDundi Kumar BevaraPas encore d'évaluation
- CDIMultisparkDocument17 pagesCDIMultisparkRandy JurasicPas encore d'évaluation
- SC Chapter 3 - Zener DiodeDocument37 pagesSC Chapter 3 - Zener DiodelornfatePas encore d'évaluation
- UCC25600Document22 pagesUCC25600Andres Lecaro JarrinPas encore d'évaluation
- PQ1CY1032Z: TO-263 Surface Mount Type Chopper RegulatorDocument9 pagesPQ1CY1032Z: TO-263 Surface Mount Type Chopper RegulatorJm'kosongtujuh RudiPas encore d'évaluation
- Instrument QuestionDocument41 pagesInstrument QuestionMallick100% (1)
- Capacitor ConnectionDocument4 pagesCapacitor ConnectionvellaicPas encore d'évaluation
- AN-CIPOS Mini-2 Reference Board-3 For IGCMxxF60GA With 3-Shunt - Ver1.0 20101021 PDFDocument14 pagesAN-CIPOS Mini-2 Reference Board-3 For IGCMxxF60GA With 3-Shunt - Ver1.0 20101021 PDFRodrigo BilheiroPas encore d'évaluation
- Physics Class 12Document6 pagesPhysics Class 12EVAN GERSHONPas encore d'évaluation
- David W. Richerson, William E. Lee - Modern Ceramic PDFDocument837 pagesDavid W. Richerson, William E. Lee - Modern Ceramic PDFUzair Anwar100% (5)
- Whirlpool Refrigerator GB2FHDXWS03 Tech Sheet W10308623Document2 pagesWhirlpool Refrigerator GB2FHDXWS03 Tech Sheet W10308623xsupportaccountPas encore d'évaluation
- US4595975Document7 pagesUS4595975Lee FarrandPas encore d'évaluation