Vous aimerez peut-être aussi
- L13 Three Phase Fully Controlled Bridge ConverterDocument29 pagesL13 Three Phase Fully Controlled Bridge Converterapi-19951707Pas encore d'évaluation
- IT 1252 - Digital Signal ProcessingDocument22 pagesIT 1252 - Digital Signal Processinganon-384794100% (3)
- Evidence Prove DiscriminationDocument5 pagesEvidence Prove DiscriminationRenzo JimenezPas encore d'évaluation
- Chapter 2 - Discrete Time Signals and SystemsDocument81 pagesChapter 2 - Discrete Time Signals and Systemsdvishwakarma1796Pas encore d'évaluation
- Convolution CorrelationDocument39 pagesConvolution CorrelationAli Raza KhanPas encore d'évaluation
- Mushroom Project - Part 1Document53 pagesMushroom Project - Part 1Seshadev PandaPas encore d'évaluation
- 8051 BasicsDocument29 pages8051 Basicsapi-1995170783% (6)
- 8051 BasicsDocument29 pages8051 Basicsapi-1995170783% (6)
- Lecture 2 - DTSDocument28 pagesLecture 2 - DTSq6hvqqzy5fPas encore d'évaluation
- Digital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibDocument4 pagesDigital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibSahdanPas encore d'évaluation
- 2-Signal & System-20230224-190109Document40 pages2-Signal & System-20230224-190109xianlei SanPas encore d'évaluation
- Properties - of - ConvolutionDocument25 pagesProperties - of - Convolutionapi-26581966Pas encore d'évaluation
- EE338-Digital Signal Processing: Tutorial 2 SolutionsDocument2 pagesEE338-Digital Signal Processing: Tutorial 2 Solutionsditi sanghaiPas encore d'évaluation
- DSP 1 Signals and SystemsDocument73 pagesDSP 1 Signals and SystemsAira Mae CrespoPas encore d'évaluation
- DTSSP 2mark Q&ADocument31 pagesDTSSP 2mark Q&AAnonymous yO7rcec6vuPas encore d'évaluation
- DSP Chapter 2 Part 1Document45 pagesDSP Chapter 2 Part 1api-26581966100% (1)
- It1252 Digital Signal ProcessingDocument22 pagesIt1252 Digital Signal ProcessingainugiriPas encore d'évaluation
- Exam2-Problem 1 Part (A)Document15 pagesExam2-Problem 1 Part (A)syedsalmanali91100% (1)
- Lecture34 Week34Document29 pagesLecture34 Week34RabiaPas encore d'évaluation
- Ee8591 DSPDocument28 pagesEe8591 DSPtamizh kaviPas encore d'évaluation
- New Era University: College of Engineering and Architecture Department of Electronics EngineeringDocument10 pagesNew Era University: College of Engineering and Architecture Department of Electronics EngineeringLe AndroPas encore d'évaluation
- Chapter 2 Discrete-Time Signals and Systems: IntroductionDocument21 pagesChapter 2 Discrete-Time Signals and Systems: IntroductionYiwen HsiPas encore d'évaluation
- Review of Discrete-Time SystemsDocument27 pagesReview of Discrete-Time SystemsShruti KumariPas encore d'évaluation
- Introduction To Convolution: Definition Convolution Is An Operator That Takes An InputDocument15 pagesIntroduction To Convolution: Definition Convolution Is An Operator That Takes An InputDr. Mohiuddin AhmadPas encore d'évaluation
- 1.1. Discrete-Time Signals and Systems. Basic DefinitionsDocument11 pages1.1. Discrete-Time Signals and Systems. Basic DefinitionsNirmal Kumar PandeyPas encore d'évaluation
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017Pas encore d'évaluation
- Discrete Time Signals&systemsDocument24 pagesDiscrete Time Signals&systemsRogers Rodri ShayoPas encore d'évaluation
- Topic 3 Introduction To SystemsDocument7 pagesTopic 3 Introduction To SystemsRona SharmaPas encore d'évaluation
- LECT - 2 Discrete-Time Systems ConvolutionDocument44 pagesLECT - 2 Discrete-Time Systems ConvolutionTazeb AyelePas encore d'évaluation
- Unit-I Review of Discrete Signals and Systems: SignalDocument26 pagesUnit-I Review of Discrete Signals and Systems: SignalRaghuPas encore d'évaluation
- PS1 Signals and Systems 12jan2024Document3 pagesPS1 Signals and Systems 12jan2024mrinali.minnu9Pas encore d'évaluation
- Lecture 2 Review of Discrete-Time Signal and System AnalysisDocument41 pagesLecture 2 Review of Discrete-Time Signal and System AnalysisAman SharmaPas encore d'évaluation
- 1.6.3 Continuous-time Impulse and Step Functions: Representing of a signal x (n) using a train of impulses δ (n − k)Document3 pages1.6.3 Continuous-time Impulse and Step Functions: Representing of a signal x (n) using a train of impulses δ (n − k)shriram jadhavPas encore d'évaluation
- Discrete-Time Signals and SystemsDocument241 pagesDiscrete-Time Signals and Systemsvmohanakrishnaredddy12Pas encore d'évaluation
- Unit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E DepartmentDocument47 pagesUnit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E Departmentanil kumarPas encore d'évaluation
- EEO 401 Note Set 4Document8 pagesEEO 401 Note Set 4The great PPas encore d'évaluation
- Convolution: Ee-2027 Sas, L4: 1/17Document16 pagesConvolution: Ee-2027 Sas, L4: 1/17Dr. Mohiuddin AhmadPas encore d'évaluation
- LAB 2: Discrete Time Signals & Linear System ObjectivesDocument12 pagesLAB 2: Discrete Time Signals & Linear System Objectivesmjrahimi.eee2020Pas encore d'évaluation
- Ece308 7 PDFDocument4 pagesEce308 7 PDFHavotAlbeyboniPas encore d'évaluation
- LTI Described by Difference Equations: Yn XK NDocument4 pagesLTI Described by Difference Equations: Yn XK NMnshPas encore d'évaluation
- LTI Described by Difference Equations: Yn XK NDocument4 pagesLTI Described by Difference Equations: Yn XK NHavotAlbeyboniPas encore d'évaluation
- In Summary ContinuousDocument55 pagesIn Summary ContinuousFatmir KelmendiPas encore d'évaluation
- 3-Classification of Signals and Systems-05!01!2024Document21 pages3-Classification of Signals and Systems-05!01!2024rupinsgmPas encore d'évaluation
- Chapter One Discrete-Time Signals and Systems: Lecture #3Document27 pagesChapter One Discrete-Time Signals and Systems: Lecture #3DANIEL ABERAPas encore d'évaluation
- Digital Signal Processing: Air UniversityDocument11 pagesDigital Signal Processing: Air UniversityGhazal KhanPas encore d'évaluation
- Lab 05Document3 pagesLab 05Misbah Sajid ChaudhryPas encore d'évaluation
- CSE - 610 Lecture # 2Document46 pagesCSE - 610 Lecture # 2zaidPas encore d'évaluation
- Lecture 8: Impulse Response: ECE 401: Signal and Image AnalysisDocument19 pagesLecture 8: Impulse Response: ECE 401: Signal and Image AnalysisMinh TrươngPas encore d'évaluation
- EE5130: Digital Signal ProcessingDocument3 pagesEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540Pas encore d'évaluation
- Difference EquationsDocument5 pagesDifference EquationsMnPas encore d'évaluation
- Digital Signal Processing Important Two Mark Questions With AnswersDocument15 pagesDigital Signal Processing Important Two Mark Questions With AnswerssaiPas encore d'évaluation
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunPas encore d'évaluation
- The Concept of System': - Discrete-Time SystemsDocument19 pagesThe Concept of System': - Discrete-Time SystemsFatmir KelmendiPas encore d'évaluation
- Signals and Systems Lecture 1Document11 pagesSignals and Systems Lecture 1Roi ShragaPas encore d'évaluation
- Lab 2: Sampling, Convolution, LTI Systems, and Difference EquationsDocument5 pagesLab 2: Sampling, Convolution, LTI Systems, and Difference EquationsJane MoujaessPas encore d'évaluation
- Lecture 02: Discrete Time Domain Analysis: John ChivertonDocument41 pagesLecture 02: Discrete Time Domain Analysis: John Chivertonalexbell2k12Pas encore d'évaluation
- DSP AssignmentDocument81 pagesDSP AssignmentBot 150% (2)
- Operation On Discrete-Time Signals & Discrete-Time System: Lecture - 3Document36 pagesOperation On Discrete-Time Signals & Discrete-Time System: Lecture - 3Himanshu sharmaPas encore d'évaluation
- Digital Signal Processing: Dr. MuayadDocument11 pagesDigital Signal Processing: Dr. MuayadAli KareemPas encore d'évaluation
- DSPQNAUNITIDocument9 pagesDSPQNAUNITIsurendrarakshitPas encore d'évaluation
- Reference: Digital Signal Processing Laboratory Using Matlab Author: Sanjit K. MitraDocument14 pagesReference: Digital Signal Processing Laboratory Using Matlab Author: Sanjit K. MitraPatrick HawkinsPas encore d'évaluation
- Chapter - 2 PDFDocument11 pagesChapter - 2 PDFgebretsadkan abrhaPas encore d'évaluation
- Linear Constant-Coefficient Difference Equations: M N X B K N y ADocument53 pagesLinear Constant-Coefficient Difference Equations: M N X B K N y APreeti KatiyarPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)D'EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Pas encore d'évaluation
- Dr. Mahalingam College of Engineering and Technology Pollachi - 642003Document5 pagesDr. Mahalingam College of Engineering and Technology Pollachi - 642003api-19951707Pas encore d'évaluation
- Stepper MotorDocument1 pageStepper Motorapi-19951707Pas encore d'évaluation
- Study of 8086Document27 pagesStudy of 8086api-19951707Pas encore d'évaluation
- MSC Lab Manual-MpDocument49 pagesMSC Lab Manual-Mpapi-19951707Pas encore d'évaluation
- 8BIT ADD - Ex2Document1 page8BIT ADD - Ex2api-19951707Pas encore d'évaluation
- 8051 Basic & InterfacingDocument42 pages8051 Basic & Interfacingapi-19951707Pas encore d'évaluation
- 8086 InterfacingDocument6 pages8086 Interfacingapi-19951707100% (1)
- MP Lab ManualDocument36 pagesMP Lab Manualapi-19951707Pas encore d'évaluation
- Study of 8086Document27 pagesStudy of 8086api-19951707Pas encore d'évaluation
- Study of 8086Document27 pagesStudy of 8086api-19951707Pas encore d'évaluation
- Electrical Machines Two Marks Noorul Islam Colleege of Engineering KumaracoilDocument6 pagesElectrical Machines Two Marks Noorul Islam Colleege of Engineering KumaracoilSuresh DulamPas encore d'évaluation
- L10 Single Phase Fully Controlled RectifierDocument26 pagesL10 Single Phase Fully Controlled Rectifierapi-1995170750% (2)
- L14 Three Phase Half Controlled ConverterDocument18 pagesL14 Three Phase Half Controlled Converterapi-19951707Pas encore d'évaluation
- L12 Single Phase Uncontrolled RectifierDocument22 pagesL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungPas encore d'évaluation
- L11 Single Phase Half Controlled Bridge ConverterDocument19 pagesL11 Single Phase Half Controlled Bridge Converterapi-19951707Pas encore d'évaluation
- EE1351 Solid State DrivesDocument25 pagesEE1351 Solid State DrivesGaurav KumarPas encore d'évaluation
- EC 1361-Digital Signal ProcessingDocument14 pagesEC 1361-Digital Signal ProcessingAvinash KumarPas encore d'évaluation
- Electrical Machines - IiDocument9 pagesElectrical Machines - Iiapi-19951707Pas encore d'évaluation
- Ee-1151-Circuit TheoryDocument20 pagesEe-1151-Circuit Theoryapi-19951707Pas encore d'évaluation
- SilmaDocument12 pagesSilmanobleconsultantsPas encore d'évaluation
- Dating Apps MDocument2 pagesDating Apps Mtuanhmt040604Pas encore d'évaluation
- PostScript Quick ReferenceDocument2 pagesPostScript Quick ReferenceSneetsher CrispyPas encore d'évaluation
- 2 Design of DOSAGE DESIGNDocument16 pages2 Design of DOSAGE DESIGNMarjo100% (1)
- GGG Sri MDocument2 pagesGGG Sri MGiovanni LuigiPas encore d'évaluation
- Soft Skills & Personality DevelopmentDocument62 pagesSoft Skills & Personality DevelopmentSajid PashaPas encore d'évaluation
- The Palestinian Centipede Illustrated ExcerptsDocument58 pagesThe Palestinian Centipede Illustrated ExcerptsWael HaidarPas encore d'évaluation
- Contemporary Strategic ManagementDocument2 pagesContemporary Strategic ManagementZee Dee100% (1)
- Hanwha Q Cells Data Sheet Qpeak L-g4.2 360-370 2017-10 Rev02 NaDocument2 pagesHanwha Q Cells Data Sheet Qpeak L-g4.2 360-370 2017-10 Rev02 NazulfikarPas encore d'évaluation
- ST Arduino Labs CombinedDocument80 pagesST Arduino Labs CombineddevProPas encore d'évaluation
- Perdarahan Uterus AbnormalDocument15 pagesPerdarahan Uterus Abnormalarfiah100% (1)
- SIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04Document1 pageSIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04marcospmmPas encore d'évaluation
- W.C. Hicks Appliances: Client Name SKU Item Name Delivery Price Total DueDocument2 pagesW.C. Hicks Appliances: Client Name SKU Item Name Delivery Price Total DueParth PatelPas encore d'évaluation
- Immunity Question Paper For A Level BiologyDocument2 pagesImmunity Question Paper For A Level BiologyJansi Angel100% (1)
- Mueller Hinton Agar (M-H Agar) : CompositionDocument2 pagesMueller Hinton Agar (M-H Agar) : CompositionRizkaaulyaaPas encore d'évaluation
- Toh736 - 84000 The Dharani of Parnasavari PDFDocument24 pagesToh736 - 84000 The Dharani of Parnasavari PDFJames LeePas encore d'évaluation
- Universal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukDocument3 pagesUniversal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukPhilip EgyPas encore d'évaluation
- Traditional Perceptions and Treatment of Mental Illness in EthiopiaDocument7 pagesTraditional Perceptions and Treatment of Mental Illness in EthiopiaifriqiyahPas encore d'évaluation
- 9400 Series - Catalogue - AccessoriesDocument86 pages9400 Series - Catalogue - AccessoriesSaulo Leonardo Fabelo FontesPas encore d'évaluation
- Been There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerDocument8 pagesBeen There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerNanis DimmitrisPas encore d'évaluation
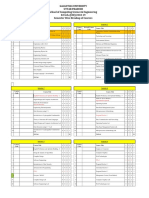
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiPas encore d'évaluation
- DCS800ServiceManual RevADocument96 pagesDCS800ServiceManual RevAElinplastPas encore d'évaluation
- Federalist Papers 10 51 ExcerptsDocument2 pagesFederalist Papers 10 51 Excerptsapi-292351355Pas encore d'évaluation
- How Chargers WorkDocument21 pagesHow Chargers WorkMuhammad Irfan RiazPas encore d'évaluation
- Answers For Some QuestionsDocument29 pagesAnswers For Some Questionsyogeshdhuri22Pas encore d'évaluation
- Nizkor Project Fallacies - LabossierDocument77 pagesNizkor Project Fallacies - Labossierapi-3766098100% (1)
- 4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsDocument5 pages4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsAhmadHijaziPas encore d'évaluation
- Vitamins - CyanocobalaminDocument12 pagesVitamins - CyanocobalaminK PrashasthaPas encore d'évaluation