Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- KoneCranes Manuals 2898Document136 pagesKoneCranes Manuals 2898Jairo Garcia Domenique67% (18)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Homework 1Document3 pagesHomework 1Shaban Malik100% (1)
- Bidirectional Visitor Counter With Energy Saving Module by Michaela KargboDocument47 pagesBidirectional Visitor Counter With Energy Saving Module by Michaela KargboMichaela Kargbo100% (1)
- Project Sharjah Higher Colleges of Technology: Electrical Power Distribution (ELE-4333)Document5 pagesProject Sharjah Higher Colleges of Technology: Electrical Power Distribution (ELE-4333)Nida NiaziPas encore d'évaluation
- CT Application Guide v1.0Document4 pagesCT Application Guide v1.0Ioan ŢileaPas encore d'évaluation
- TGN Restricted Earth Fault v1 - 0Document40 pagesTGN Restricted Earth Fault v1 - 0Anonymous dqbb02DUhPas encore d'évaluation
- Theoretical and Experimental Investigation of Parasitic BDocument7 pagesTheoretical and Experimental Investigation of Parasitic BIoan ŢileaPas encore d'évaluation
- Rezonanta La MotorDocument5 pagesRezonanta La MotorIoan ŢileaPas encore d'évaluation
- SL Gsec (En) - 1VCP000480 PDFDocument15 pagesSL Gsec (En) - 1VCP000480 PDFIoan ŢileaPas encore d'évaluation
- Possible Problems and Solutions When Introducing Variable Speed DrivesDocument6 pagesPossible Problems and Solutions When Introducing Variable Speed DrivesIoan ŢileaPas encore d'évaluation
- WEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishDocument36 pagesWEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishSreedhar SvPas encore d'évaluation
- Readme DIGSI 5 Upgrade Guideline PDFDocument8 pagesReadme DIGSI 5 Upgrade Guideline PDFg-bearPas encore d'évaluation
- Zice de Series ResonanceDocument8 pagesZice de Series ResonanceIoan ŢileaPas encore d'évaluation
- Transient of Power Pulse and Its Sequence inDocument10 pagesTransient of Power Pulse and Its Sequence inIoan ŢileaPas encore d'évaluation
- Static Frequency Converters With Reduced Parasitic EffectsDocument6 pagesStatic Frequency Converters With Reduced Parasitic EffectsIoan ŢileaPas encore d'évaluation
- The Effect of Impedance Mismatch OnDocument4 pagesThe Effect of Impedance Mismatch OnIoan ŢileaPas encore d'évaluation
- Prediction of CM Conducted EMI in PWM Inverter-Fed Machine SystemDocument4 pagesPrediction of CM Conducted EMI in PWM Inverter-Fed Machine SystemIoan ŢileaPas encore d'évaluation
- Propagation of Inverter Surge and Voltage Distribution in Motor WindingDocument10 pagesPropagation of Inverter Surge and Voltage Distribution in Motor WindingIoan ŢileaPas encore d'évaluation
- Modeling of Conducted Common Mode Perturbations BDocument10 pagesModeling of Conducted Common Mode Perturbations BIoan ŢileaPas encore d'évaluation
- Modeling of Conducted EMI (Model Motor Simulink Bun)Document8 pagesModeling of Conducted EMI (Model Motor Simulink Bun)Ioan ŢileaPas encore d'évaluation
- Measurement of Conducted Electromagnetic Emissions inDocument6 pagesMeasurement of Conducted Electromagnetic Emissions inIoan ŢileaPas encore d'évaluation
- Shaft VoltagesDocument27 pagesShaft VoltagesMathi JS MatharooPas encore d'évaluation
- MasinaDocument7 pagesMasinaIoan ŢileaPas encore d'évaluation
- Leakage Current and Common Mode VoltageDocument6 pagesLeakage Current and Common Mode VoltageIoan Ţilea100% (1)
- High Frequency Modeling of Induction Motor Drives ForDocument7 pagesHigh Frequency Modeling of Induction Motor Drives ForIoan ŢileaPas encore d'évaluation
- EMC in Inverter-Fed Induction Motor DrivesDocument6 pagesEMC in Inverter-Fed Induction Motor DrivesIoan ŢileaPas encore d'évaluation
- Experimental High Frequency Parameter IdentificationDocument6 pagesExperimental High Frequency Parameter IdentificationIoan ŢileaPas encore d'évaluation
- IAS96 BearingDocument9 pagesIAS96 BearingIoan ŢileaPas encore d'évaluation
- Filtrare Din Convertizor, Ce Metode Se Folosesc Pentru Reducere Emi, IntroducereDocument6 pagesFiltrare Din Convertizor, Ce Metode Se Folosesc Pentru Reducere Emi, IntroducereIoan ŢileaPas encore d'évaluation
- Common-Mode Current InductivelyDocument4 pagesCommon-Mode Current InductivelyIoan ŢileaPas encore d'évaluation
- High-Frequency Equivalent Circuit of An Induction Motor Driven by A PWMDocument12 pagesHigh-Frequency Equivalent Circuit of An Induction Motor Driven by A PWMIoan ŢileaPas encore d'évaluation
- EMI in Modern ACDocument6 pagesEMI in Modern ACnaver01Pas encore d'évaluation
- Converter Dependent Design of Induction Machines in The Power Range Below 1OMWDocument6 pagesConverter Dependent Design of Induction Machines in The Power Range Below 1OMWIoan ŢileaPas encore d'évaluation
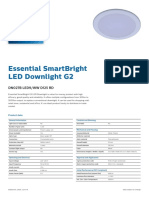
- Lighting Lighting: Essential Smartbright Led Downlight G2Document3 pagesLighting Lighting: Essential Smartbright Led Downlight G2richard sinagaPas encore d'évaluation
- Lab4 Thermal Relay-EngDocument4 pagesLab4 Thermal Relay-EngRazvanTomaPas encore d'évaluation
- Substation Lightning Protection and Earthing PDFDocument8 pagesSubstation Lightning Protection and Earthing PDFPritam100% (1)
- Utc Ta7343apDocument5 pagesUtc Ta7343apClaudiuMaxmiucPas encore d'évaluation
- CRI PumpsDocument5 pagesCRI Pumpskumarvishal07Pas encore d'évaluation
- Optimal TCSC Placement for Power System StabilityDocument13 pagesOptimal TCSC Placement for Power System StabilityBelayneh TadessePas encore d'évaluation
- Magnetic Effects of Electric CurrentDocument3 pagesMagnetic Effects of Electric Currentsonali soumyashreePas encore d'évaluation
- AFS 650-655 Installation PDFDocument36 pagesAFS 650-655 Installation PDFMatijaDebogovićPas encore d'évaluation
- Alternator Slt18 MD: Three-Phase Brushless Synchronous Alternator With AVR - 4 PolesDocument7 pagesAlternator Slt18 MD: Three-Phase Brushless Synchronous Alternator With AVR - 4 PoleshirararaPas encore d'évaluation
- Dialight Safesight LED Area Light 2 7000Document16 pagesDialight Safesight LED Area Light 2 7000Gustavo GaibarPas encore d'évaluation
- 74HC4094Document11 pages74HC4094Gustavo BarcasnegrasPas encore d'évaluation
- Virtual Instrumentation ExplainedDocument2 pagesVirtual Instrumentation ExplainedAshok MadhanPas encore d'évaluation
- DynamoDocument7 pagesDynamokeshav ranaPas encore d'évaluation
- Physics Project (1) DDocument24 pagesPhysics Project (1) DAKM KINGPas encore d'évaluation
- Manual Smith V3.10Document75 pagesManual Smith V3.10Dreiker UtreraPas encore d'évaluation
- Isc 2SD998: Silicon NPN Power TransistorDocument2 pagesIsc 2SD998: Silicon NPN Power TransistorDjoPas encore d'évaluation
- 422e 428e Elektro2 PDFDocument4 pages422e 428e Elektro2 PDFdenisPas encore d'évaluation
- Deltapower PDFDocument62 pagesDeltapower PDFVinh BLOPas encore d'évaluation
- Features: Slls115E - October 1980 - Revised October 2007Document27 pagesFeatures: Slls115E - October 1980 - Revised October 2007Iván GissiPas encore d'évaluation
- 0.3.1 Analog Design Relies On Ab-StractionDocument15 pages0.3.1 Analog Design Relies On Ab-StractionbikirangPas encore d'évaluation
- Current Range: EssailecDocument1 pageCurrent Range: EssailecBra BicabaPas encore d'évaluation
- BBD Bucket StandfordDocument33 pagesBBD Bucket StandfordKotorrPas encore d'évaluation
- Hydrastep and Hydratect Water/Steam Monitoring SystemsDocument12 pagesHydrastep and Hydratect Water/Steam Monitoring Systemscytech6619Pas encore d'évaluation
- Fisher Paykel MR700 Series Tech ManualDocument64 pagesFisher Paykel MR700 Series Tech ManualChristopher CollinsPas encore d'évaluation
- RL Drake Low Pass Filter Installation GuideDocument1 pageRL Drake Low Pass Filter Installation Guide240GL guyPas encore d'évaluation