Vous aimerez peut-être aussi
- Calibration of Peristaltic Pumps - Lab 1Document12 pagesCalibration of Peristaltic Pumps - Lab 1mmccomas08100% (2)
- The Effect of Pi and Pid Controllers On Flow Control SystemDocument16 pagesThe Effect of Pi and Pid Controllers On Flow Control SystemahedooohPas encore d'évaluation
- IPC LAB - Experiment 1Document4 pagesIPC LAB - Experiment 1fayeenriquez100% (2)
- Thermocouples Experiment: To Determine The Time Constant of A Typical Iron-Constantan Thermocouple.Document8 pagesThermocouples Experiment: To Determine The Time Constant of A Typical Iron-Constantan Thermocouple.Hafiz Tanveer50% (2)
- Energy BalanceDocument16 pagesEnergy BalancewizlanPas encore d'évaluation
- Chemical Reaction Engineering IDocument42 pagesChemical Reaction Engineering IMuthu UmayalPas encore d'évaluation
- INTEL 8259A Programmable Interrupt ControllerDocument13 pagesINTEL 8259A Programmable Interrupt Controllerkaushikei22Pas encore d'évaluation
- Necromunda CatalogDocument35 pagesNecromunda Catalogzafnequin8494100% (1)
- PC Lab ManualDocument47 pagesPC Lab ManualAoiPas encore d'évaluation
- Liquid Level Control SystemDocument0 pageLiquid Level Control SystemNajiRihaniPas encore d'évaluation
- Isothermal CSTR PDFDocument9 pagesIsothermal CSTR PDFprashant_cool_4_uPas encore d'évaluation
- Experiment 4 Study On Dynamics of First Order and Second OrderDocument12 pagesExperiment 4 Study On Dynamics of First Order and Second OrderQastalani Ghazali100% (1)
- 5 - (CSTR Bp143)Document12 pages5 - (CSTR Bp143)Aisyah Addia AzizanPas encore d'évaluation
- CHE492 08 PC Flow Control TrainerDocument47 pagesCHE492 08 PC Flow Control TrainerAnkit Malhotra100% (2)
- Results and Discussion of CSTR in SeriesDocument3 pagesResults and Discussion of CSTR in SeriesleenzalalPas encore d'évaluation
- Lab 1 - CSTRDocument22 pagesLab 1 - CSTRnur athilahPas encore d'évaluation
- Closed Loop Response of Temperature Control SystemDocument6 pagesClosed Loop Response of Temperature Control SystemsjsujiprasadPas encore d'évaluation
- Pressure Control TrainerDocument19 pagesPressure Control TrainerGoutham Here100% (1)
- Stirred Tank in Series ReportDocument20 pagesStirred Tank in Series ReportEmonbeifo EfosaserePas encore d'évaluation
- Separation Processes Lab ReportDocument15 pagesSeparation Processes Lab ReportArslanQureshi0% (1)
- Series and Parallel PumpsDocument11 pagesSeries and Parallel PumpsKevin Devastian100% (1)
- Experiment 2 - Forced Draft Cooling TowerDocument14 pagesExperiment 2 - Forced Draft Cooling TowerSonia YuPas encore d'évaluation
- Manual For Wetted Wall ColumnDocument8 pagesManual For Wetted Wall ColumnBalRam DhimanPas encore d'évaluation
- Lab ManualDocument24 pagesLab ManualAasia FarrukhPas encore d'évaluation
- Report of An Industrial Visit To Reliance Thermal Power Plant, DahanuDocument8 pagesReport of An Industrial Visit To Reliance Thermal Power Plant, DahanuAmeya VirkudPas encore d'évaluation
- Isothermal Semi-Batch Reactor PPT RJC SirDocument16 pagesIsothermal Semi-Batch Reactor PPT RJC Sirsdjdsf100% (1)
- Mass Transfer CoefficientDocument5 pagesMass Transfer CoefficientPinjala AnoopPas encore d'évaluation
- Lab Report Process Control - Flow Measure PDFDocument23 pagesLab Report Process Control - Flow Measure PDFcleytonmarques1991100% (1)
- Study of P, PD, Pi, Pid Controllers Using Mat LabDocument13 pagesStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanPas encore d'évaluation
- LC2-Level Control II - Lab ReportDocument13 pagesLC2-Level Control II - Lab ReportKarishma GobinPas encore d'évaluation
- Exp. 8 Diffusion of Sodium Chloride in WaterDocument6 pagesExp. 8 Diffusion of Sodium Chloride in WaterElaine Pui100% (1)
- First Order SystemsDocument40 pagesFirst Order SystemsWaqas SaghirPas encore d'évaluation
- EI2352 - Process Control - 2 Marks With AnswersDocument19 pagesEI2352 - Process Control - 2 Marks With Answersnagarajansamayans100% (1)
- Diffusivity of Liquid Into LiquidDocument8 pagesDiffusivity of Liquid Into LiquidZahraa GhanemPas encore d'évaluation
- Time Constant of Thermocouple & ThermometerDocument8 pagesTime Constant of Thermocouple & Thermometerprashant_cool_4_uPas encore d'évaluation
- Wetted Wall ColumnDocument5 pagesWetted Wall ColumnAbhishek Kumar20% (5)
- Experiment No: 6: Feed Tanks Batch ReactorDocument5 pagesExperiment No: 6: Feed Tanks Batch Reactorfareeha saeedPas encore d'évaluation
- Osbourne ReynoldDocument13 pagesOsbourne ReynoldN Afiqah Razak0% (1)
- Lab Report - Distillation of Bubble CapDocument21 pagesLab Report - Distillation of Bubble Capratish100% (1)
- Experiment G: Connection of Thermocouple in Parallel & SeriesDocument6 pagesExperiment G: Connection of Thermocouple in Parallel & SeriesSalina Shaffie100% (1)
- PDFDocument88 pagesPDFMuralidharanPas encore d'évaluation
- Wetted Wall Column Experiment and Set UPDocument4 pagesWetted Wall Column Experiment and Set UPvarun kumarPas encore d'évaluation
- Isothermal Batch ReactorDocument5 pagesIsothermal Batch ReactorSrikanthPas encore d'évaluation
- Control Lab ReportDocument11 pagesControl Lab ReportMariamMunirAhmad100% (1)
- Process Dynamics and Control SolutionsDocument27 pagesProcess Dynamics and Control Solutionsciotti6209Pas encore d'évaluation
- Heat Exchanger ReportDocument8 pagesHeat Exchanger Reportarslan shahidPas encore d'évaluation
- Lab 10-Batch ReactorDocument22 pagesLab 10-Batch Reactorniraj_bairagiPas encore d'évaluation
- S.no. Name of The Experiment Date of Conduction Date of Submission P2 Cascade CSTR 4 February, 2021 9 February, 2021Document14 pagesS.no. Name of The Experiment Date of Conduction Date of Submission P2 Cascade CSTR 4 February, 2021 9 February, 2021DEEPSHIKA DUTTAPas encore d'évaluation
- Lab Report Aspen Hysis UiTMDocument12 pagesLab Report Aspen Hysis UiTMAhmad SiddiqPas encore d'évaluation
- Batch Reactor ExpDocument12 pagesBatch Reactor ExpJack AndreasPas encore d'évaluation
- Temperature Process RigDocument9 pagesTemperature Process RigHafiz TanveerPas encore d'évaluation
- Sieve Plate Distillation Column - Lab ReportDocument4 pagesSieve Plate Distillation Column - Lab ReportShrankhla NaryaPas encore d'évaluation
- CPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportDocument24 pagesCPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportSiti Hajar Mohamed100% (1)
- Instrumentation & Process Control VivaDocument17 pagesInstrumentation & Process Control VivaHarshaPas encore d'évaluation
- Reynolds AnalogyDocument4 pagesReynolds AnalogySudhir Kumar KandukuriPas encore d'évaluation
- Summary of Important Equations in ThermodynamicsDocument5 pagesSummary of Important Equations in ThermodynamicsKevin BlackburnPas encore d'évaluation
- HW 13Document5 pagesHW 13Yahya TawakalPas encore d'évaluation
- Home Project Workshop Nodal Centers News & Events Survey Forum Contact Us LoginDocument15 pagesHome Project Workshop Nodal Centers News & Events Survey Forum Contact Us LoginRajesh BaabuPas encore d'évaluation
- Heat Transfer Excel Calculations 1Document48 pagesHeat Transfer Excel Calculations 1Felix100% (1)
- Chemical Kinetics: (Lectures) Dr. Paul T. Maragh Tue. 5:00 P.M. / Wed. 9:00 A.M. Question On C10K Paper 1Document46 pagesChemical Kinetics: (Lectures) Dr. Paul T. Maragh Tue. 5:00 P.M. / Wed. 9:00 A.M. Question On C10K Paper 1karimakkiPas encore d'évaluation
- EP 600 Calibration ProcedureDocument12 pagesEP 600 Calibration ProceduregueridiPas encore d'évaluation
- Control Systems: Ms.N.Chandrakala Lect /eee Ms.M.Vijayalakshmi Lect/EeeDocument37 pagesControl Systems: Ms.N.Chandrakala Lect /eee Ms.M.Vijayalakshmi Lect/EeeAmy MaggiPas encore d'évaluation
- Sri Ramakrishna Polytechnic College: Seminar OnDocument33 pagesSri Ramakrishna Polytechnic College: Seminar Onkaushikei22Pas encore d'évaluation
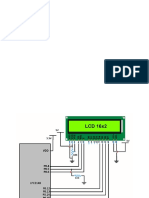
- Lpc2148 and LCD InterfacingDocument4 pagesLpc2148 and LCD Interfacingkaushikei22Pas encore d'évaluation
- ch2 - 3 Sensors and Transducers PDFDocument21 pagesch2 - 3 Sensors and Transducers PDFDeepakSinghPas encore d'évaluation
- Week 2 Assignment Solution PDFDocument2 pagesWeek 2 Assignment Solution PDFNishithaPas encore d'évaluation
- Introduction To Industrial Automation & PLCDocument21 pagesIntroduction To Industrial Automation & PLCkaushikei22Pas encore d'évaluation
- Introduction To Industrial Automation in PLCDocument50 pagesIntroduction To Industrial Automation in PLCkaushikei22100% (1)
- Digital PIDDocument12 pagesDigital PIDkaushikei22Pas encore d'évaluation
- Relay Vs Ladder DiagramDocument4 pagesRelay Vs Ladder Diagramkaushikei22Pas encore d'évaluation
- Embedded System Design MethodologyDocument37 pagesEmbedded System Design Methodologykaushikei22Pas encore d'évaluation
- Data Acquisition and Control Using Arduino & MATLABDocument42 pagesData Acquisition and Control Using Arduino & MATLABkaushikei22Pas encore d'évaluation
- LPC2148Document5 pagesLPC2148kaushikei22Pas encore d'évaluation
- ISPSoft UM EN 20170614 PDFDocument840 pagesISPSoft UM EN 20170614 PDFRE ErnestoPas encore d'évaluation
- USARTDocument13 pagesUSARTkaushikei22Pas encore d'évaluation
- Linux Kernal 1Document41 pagesLinux Kernal 1kaushikei22Pas encore d'évaluation
- Forward Collison AvoidanceDocument3 pagesForward Collison Avoidancekaushikei22Pas encore d'évaluation
- Data Acquisition and Control Using Arduino & MATLABDocument38 pagesData Acquisition and Control Using Arduino & MATLABkaushikei22Pas encore d'évaluation
- Instruction Set of 8085 - GDLCDocument82 pagesInstruction Set of 8085 - GDLCkaushikei22Pas encore d'évaluation
- UART / USART in PIC MicrocontrollerDocument5 pagesUART / USART in PIC Microcontrollerkaushikei22Pas encore d'évaluation
- Overview of The Presentation: Peer Enable ProgramDocument6 pagesOverview of The Presentation: Peer Enable Programkaushikei22Pas encore d'évaluation
- Human CellDocument17 pagesHuman Cellkaushikei22Pas encore d'évaluation
- Data Acquisition and Control Using Arduino & MATLABDocument38 pagesData Acquisition and Control Using Arduino & MATLABkaushikei22Pas encore d'évaluation
- Transducer Types in DetailDocument6 pagesTransducer Types in Detailkaushikei22Pas encore d'évaluation
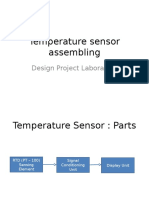
- Design of Temperature SensorDocument18 pagesDesign of Temperature Sensorkaushikei22Pas encore d'évaluation
- Design Project LabDocument71 pagesDesign Project Labkaushikei22Pas encore d'évaluation
- Itb-05c Linearisation of ThermocoupleDocument20 pagesItb-05c Linearisation of Thermocouplekaushikei22Pas encore d'évaluation
- Design Project LabDocument71 pagesDesign Project Labkaushikei22Pas encore d'évaluation
- PID Control Using LabVIEW in Process Control LaboratoryDocument67 pagesPID Control Using LabVIEW in Process Control Laboratorykaushikei22Pas encore d'évaluation
- Design Project LabDocument80 pagesDesign Project Labkaushikei22Pas encore d'évaluation
- 3 AcmeCorporation Fullstrategicplan 06052015 PDFDocument11 pages3 AcmeCorporation Fullstrategicplan 06052015 PDFDina DawoodPas encore d'évaluation
- Agency Procurement Request: Ipil Heights Elementary SchoolDocument1 pageAgency Procurement Request: Ipil Heights Elementary SchoolShar Nur JeanPas encore d'évaluation
- Course: Introduction To Geomatics (GLS411) Group Practical (2-3 Persons in A Group) Practical #3: Principle and Operation of A LevelDocument3 pagesCourse: Introduction To Geomatics (GLS411) Group Practical (2-3 Persons in A Group) Practical #3: Principle and Operation of A LevelalyafarzanaPas encore d'évaluation
- Eaai S 23 02045 PDFDocument28 pagesEaai S 23 02045 PDFAnjali JainPas encore d'évaluation
- Honeywell Rondostat Hr20 SpesificationDocument2 pagesHoneywell Rondostat Hr20 Spesificationfrox123Pas encore d'évaluation
- Rolling TechnologyDocument4 pagesRolling TechnologyFrancis Erwin Bernard100% (1)
- Credit CardDocument6 pagesCredit CardJ Boy LipayonPas encore d'évaluation
- NJEX 7300G: Pole MountedDocument130 pagesNJEX 7300G: Pole MountedJorge Luis MartinezPas encore d'évaluation
- Work Permits New Guideline Amendments 2021 23.11.2021Document7 pagesWork Permits New Guideline Amendments 2021 23.11.2021Sabrina BrathwaitePas encore d'évaluation
- Introduction of ProtozoaDocument31 pagesIntroduction of ProtozoaEINSTEIN2D100% (2)
- Deloitte - Introduction To TS&A - CloudDocument2 pagesDeloitte - Introduction To TS&A - Cloudsatyam100% (1)
- Jaiib QpapersDocument250 pagesJaiib Qpapersjaya htPas encore d'évaluation
- Presentación de Power Point Sobre Aspectos de La Cultura Inglesa Que Han Influido en El Desarrollo de La HumanidadDocument14 pagesPresentación de Power Point Sobre Aspectos de La Cultura Inglesa Que Han Influido en El Desarrollo de La HumanidadAndres EduardoPas encore d'évaluation
- IGCSE 0408 Unseen Poem QuestionsDocument5 pagesIGCSE 0408 Unseen Poem QuestionsMenon HariPas encore d'évaluation
- Geopolymer Book Chapter1 PDFDocument37 pagesGeopolymer Book Chapter1 PDFDick ManPas encore d'évaluation
- CO 101 Introductory Computing CO 102 Computing LabDocument17 pagesCO 101 Introductory Computing CO 102 Computing Labadityabaid4Pas encore d'évaluation
- Preblending of Raw Materia1Document26 pagesPreblending of Raw Materia1Mohammed Abdo100% (1)
- Investing in Granada's Property Market - Gaspar LinoDocument1 pageInvesting in Granada's Property Market - Gaspar LinoGaspar LinoPas encore d'évaluation
- IELTS Material Writing 1Document112 pagesIELTS Material Writing 1Lê hoàng anhPas encore d'évaluation
- DR Afwan Fajri - Trauma - Juli 2023Document82 pagesDR Afwan Fajri - Trauma - Juli 2023afwan fajriPas encore d'évaluation
- HC+ Shoring System ScaffoldDocument31 pagesHC+ Shoring System ScaffoldShafiqPas encore d'évaluation
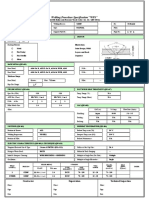
- Wps For Carbon Steel THK 7.11 GtawDocument1 pageWps For Carbon Steel THK 7.11 GtawAli MoosaviPas encore d'évaluation
- 50 Law-Firms Details by Vaibhav SharmaDocument17 pages50 Law-Firms Details by Vaibhav SharmaApoorva NandiniPas encore d'évaluation
- PixiiDocument3 pagesPixiiFoxPas encore d'évaluation
- China's Military UAV Industry - 14 June 2013Document21 pagesChina's Military UAV Industry - 14 June 2013Deep Kanakia100% (1)
- Context in TranslationDocument23 pagesContext in TranslationRaluca FloreaPas encore d'évaluation
- Under Suitable Conditions, Butane, C: © OCR 2022. You May Photocopy ThisDocument13 pagesUnder Suitable Conditions, Butane, C: © OCR 2022. You May Photocopy ThisMahmud RahmanPas encore d'évaluation
- ISSA2013Ed CabinStores v100 Часть10Document2 pagesISSA2013Ed CabinStores v100 Часть10AlexanderPas encore d'évaluation
- Rate If Iodine and PropanoneDocument3 pagesRate If Iodine and Propanoneshareef1Pas encore d'évaluation