Vous aimerez peut-être aussi
- Controlling Motors in The Presence of Friction and Backlash: Tim Wescott, Wescott Design ServicesDocument26 pagesControlling Motors in The Presence of Friction and Backlash: Tim Wescott, Wescott Design ServicesAmirmehdi YazdaniPas encore d'évaluation
- Achieving Your Accuracy GoalsDocument11 pagesAchieving Your Accuracy GoalsSanjay MehrishiPas encore d'évaluation
- Collision Detection: Understanding Visual Intersections in Computer VisionD'EverandCollision Detection: Understanding Visual Intersections in Computer VisionPas encore d'évaluation
- 286926639microsoft Word - Copy of IJSR4Document8 pages286926639microsoft Word - Copy of IJSR4rasim_m1146Pas encore d'évaluation
- FeaDocument73 pagesFeaapi-3698788100% (1)
- Mercier2019 PDFDocument42 pagesMercier2019 PDFacar1Pas encore d'évaluation
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukePas encore d'évaluation
- Valve's Dynamic Damping Characteristics - Measurement and IdentificationDocument6 pagesValve's Dynamic Damping Characteristics - Measurement and IdentificationJuan OlguinPas encore d'évaluation
- Ananthapadmanabha Et AlDocument11 pagesAnanthapadmanabha Et AlpkumarmysPas encore d'évaluation
- Design of A Fast Transient Stability Control Scheme in Power SystemDocument8 pagesDesign of A Fast Transient Stability Control Scheme in Power SystemsunitharajababuPas encore d'évaluation
- Multi-Sensor Switching Strategy For Automotive Longitudinal ControlDocument6 pagesMulti-Sensor Switching Strategy For Automotive Longitudinal ControlMarioPas encore d'évaluation
- A Guide To Mechanical Impedance and Structural Response TechniquesDocument18 pagesA Guide To Mechanical Impedance and Structural Response TechniquesRodrigoPas encore d'évaluation
- Thesis Condition MonitoringDocument9 pagesThesis Condition Monitoringraquellivingstonakron100% (2)
- Dynamic Susceptibility Method For Piping VibrationDocument13 pagesDynamic Susceptibility Method For Piping VibrationA. VenugopalPas encore d'évaluation
- Compendium 4Document5 pagesCompendium 4m.jovanoskaPas encore d'évaluation
- Discrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyDocument4 pagesDiscrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyElzan AgungPas encore d'évaluation
- Transient Stability Margin Prediction Using Equal-Area CriterionDocument9 pagesTransient Stability Margin Prediction Using Equal-Area CriterionVerruumm AminePas encore d'évaluation
- 15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCDocument4 pages15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCfirst lastPas encore d'évaluation
- Robot Mechanisms: 1.1 Kinematic FormsDocument5 pagesRobot Mechanisms: 1.1 Kinematic FormsVikram KedambadiPas encore d'évaluation
- The Dynamic Susceptibilty VibrDocument14 pagesThe Dynamic Susceptibilty Vibraneesh awasthiPas encore d'évaluation
- Ra Tip Over StabilityDocument7 pagesRa Tip Over StabilityNithil PasunuriPas encore d'évaluation
- Nonlinear Model of DC MotorDocument20 pagesNonlinear Model of DC MotorjgreenguitarsPas encore d'évaluation
- Tuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessDocument4 pagesTuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessAnonymous WkbmWCa8MPas encore d'évaluation
- Analytical Tools For Power System RestorationDocument7 pagesAnalytical Tools For Power System Restorationeorea1341Pas encore d'évaluation
- EM77 - Modal Testing Part 2 - Experimental Modal AnalysisDocument3 pagesEM77 - Modal Testing Part 2 - Experimental Modal AnalysisChad HuntPas encore d'évaluation
- International Journal of Engineering Science: Farooq M, Dao Bo WangDocument13 pagesInternational Journal of Engineering Science: Farooq M, Dao Bo Wangphyco1954Pas encore d'évaluation
- Realistic Expectations While Monitoring With Networked Robotic Total Station Systems in Live Rail Environments. - Crossrail Learning LegacyDocument41 pagesRealistic Expectations While Monitoring With Networked Robotic Total Station Systems in Live Rail Environments. - Crossrail Learning LegacyJuan Pablo GonzálezPas encore d'évaluation
- Aktifkontol SistemleriDocument20 pagesAktifkontol SistemleriJamie MckenziePas encore d'évaluation
- StatcomDocument6 pagesStatcomsathyakalyanPas encore d'évaluation
- 28 FTp01Document6 pages28 FTp01Squishi JilbertPas encore d'évaluation
- Modal Analysis Vehicle Dynamics 44632576Document12 pagesModal Analysis Vehicle Dynamics 44632576Basil AzeemPas encore d'évaluation
- RobotDocument11 pagesRobotreast21Pas encore d'évaluation
- Control System ModelingDocument24 pagesControl System ModelingSiva Bala KrishnanPas encore d'évaluation
- Data Acquisition: Detectors: TransducersDocument11 pagesData Acquisition: Detectors: TransducersVasile RaduPas encore d'évaluation
- Lec3 PDFDocument20 pagesLec3 PDFdeciohPas encore d'évaluation
- Bounded-Impedance Absolute Stability of Bilateral Teleoperation Control Systems-PnqDocument13 pagesBounded-Impedance Absolute Stability of Bilateral Teleoperation Control Systems-PnqArchPas encore d'évaluation
- Solution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemDocument6 pagesSolution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalPas encore d'évaluation
- Us 5483462Document17 pagesUs 5483462c_h_v_k_rPas encore d'évaluation
- Dhuaa PDFDocument8 pagesDhuaa PDFAhmadMoaazPas encore d'évaluation
- DAV FinalLab ExamDocument31 pagesDAV FinalLab Examnikhilrajput686Pas encore d'évaluation
- Twin Rotor Observer ImplementationDocument7 pagesTwin Rotor Observer Implementationtidjani86Pas encore d'évaluation
- Estimating Parameters in A Lumped Parameter System With First Principle Modeling and Dynamic ExperimentsDocument6 pagesEstimating Parameters in A Lumped Parameter System With First Principle Modeling and Dynamic ExperimentsParthiban RajendiranPas encore d'évaluation
- Lecture 1 Non Linear ControlDocument21 pagesLecture 1 Non Linear ControlShivan BiradarPas encore d'évaluation
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanPas encore d'évaluation
- Swing EquationDocument6 pagesSwing EquationVaibhav kumbhar100% (1)
- Motion Basics Terminology & StandardsDocument13 pagesMotion Basics Terminology & StandardsPasang ChogyiPas encore d'évaluation
- Vibration Measurement: Nirjhar DhangDocument10 pagesVibration Measurement: Nirjhar DhangLuis Carlos EsquivelPas encore d'évaluation
- Controller Design ThesisDocument4 pagesController Design Thesisaprilgriffinbeaumont100% (2)
- Dynamic Susceptibility Method For Piping Vibration: Dr. R. T. Hartlen, PED, Ontario, CanadaDocument8 pagesDynamic Susceptibility Method For Piping Vibration: Dr. R. T. Hartlen, PED, Ontario, Canadaevo2005_2006Pas encore d'évaluation
- Analysis of Load Monitoring System in Hydraulic MoDocument11 pagesAnalysis of Load Monitoring System in Hydraulic Mochzakiabbas5250Pas encore d'évaluation
- Control Estabilidad PS Feb 07Document9 pagesControl Estabilidad PS Feb 07freddyriveraPas encore d'évaluation
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Document15 pagesTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spPas encore d'évaluation
- Force Balance Sensor TechnologyDocument5 pagesForce Balance Sensor TechnologyAngela Maribel Valdez NeyraPas encore d'évaluation
- Design Optimization Analysis of An Anti-Backlash GearedDocument15 pagesDesign Optimization Analysis of An Anti-Backlash GearedひろしPas encore d'évaluation
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocument29 pagesMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadPas encore d'évaluation
- EIA321CDocument10 pagesEIA321CawemetalPas encore d'évaluation
- 5051 AppDocument37 pages5051 AppawemetalPas encore d'évaluation
- Pspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithDocument26 pagesPspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithawemetalPas encore d'évaluation
- Technical Information: Product Finder Home PageDocument2 pagesTechnical Information: Product Finder Home PageawemetalPas encore d'évaluation
- ZapperDocument3 pagesZapperawemetal0% (1)
- Dditional Iterature Vailable: H515 Catalog T-Slot Assembly SystemDocument1 pageDditional Iterature Vailable: H515 Catalog T-Slot Assembly SystemawemetalPas encore d'évaluation
- Technical Information: Product Finder Home PageDocument6 pagesTechnical Information: Product Finder Home PageawemetalPas encore d'évaluation
- DLL Library: Product Finder Home PageDocument1 pageDLL Library: Product Finder Home PageawemetalPas encore d'évaluation
- Alphabetical Index: Product Finder Home PageDocument2 pagesAlphabetical Index: Product Finder Home PageawemetalPas encore d'évaluation
- H834P003Document2 pagesH834P003awemetalPas encore d'évaluation
- Limited Warranty: Product Finder Home PageDocument1 pageLimited Warranty: Product Finder Home PageawemetalPas encore d'évaluation
- G-Code Compiler: Product Finder Home PageDocument2 pagesG-Code Compiler: Product Finder Home PageawemetalPas encore d'évaluation
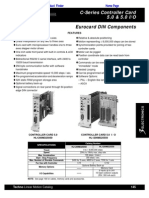
- Eurocard DIN Components: C-Series Controller Card 5.0 & 5.0 I/ODocument1 pageEurocard DIN Components: C-Series Controller Card 5.0 & 5.0 I/OawemetalPas encore d'évaluation
- PCI (PC Bus) Components: Servo System GuideDocument1 pagePCI (PC Bus) Components: Servo System GuideawemetalPas encore d'évaluation
- H834P170Document1 pageH834P170awemetalPas encore d'évaluation
- H834P171Document1 pageH834P171awemetalPas encore d'évaluation
- H834P169Document1 pageH834P169awemetalPas encore d'évaluation
- Stepper Motor Drivers: Product Finder Home PageDocument1 pageStepper Motor Drivers: Product Finder Home PageawemetalPas encore d'évaluation
- CAM Software Selection Guide: Product Finder Home PageDocument1 pageCAM Software Selection Guide: Product Finder Home PageawemetalPas encore d'évaluation
- Eurocard DIN Components: C-Series Stepper Motor Driver With Power SupplyDocument1 pageEurocard DIN Components: C-Series Stepper Motor Driver With Power SupplyawemetalPas encore d'évaluation
- H834P146Document1 pageH834P146awemetalPas encore d'évaluation
- Eurocard DIN Components: C-Series Controller Card 4.0 & 4.0 I/ODocument1 pageEurocard DIN Components: C-Series Controller Card 4.0 & 4.0 I/OawemetalPas encore d'évaluation
- C-Series C142 Machine Controller Eurocard DIN Packaged SystemsDocument2 pagesC-Series C142 Machine Controller Eurocard DIN Packaged SystemsawemetalPas encore d'évaluation
- Root-Mean-Square Speed (RMS Speed)Document10 pagesRoot-Mean-Square Speed (RMS Speed)MD Al Fahad NirobPas encore d'évaluation
- 1 s2.0 S1674775522001718 MainDocument12 pages1 s2.0 S1674775522001718 Mainilham halikPas encore d'évaluation
- 9th Guess PhysicsDocument46 pages9th Guess Physicsanubunny142Pas encore d'évaluation
- Simple Stress StrainDocument8 pagesSimple Stress StrainJames Ortega33% (3)
- Fundamentals of AerodynamicsDocument39 pagesFundamentals of AerodynamicsMarion Nori MarallagPas encore d'évaluation
- Bridge Loadings ISDocument32 pagesBridge Loadings ISGaurabPas encore d'évaluation
- Tackling A Heavy Issue: Understanding Correct Placement of Trial WeightsDocument4 pagesTackling A Heavy Issue: Understanding Correct Placement of Trial WeightsSreekanthMylavarapuPas encore d'évaluation
- Statistical Mechanics - Pathria Homework 2Document6 pagesStatistical Mechanics - Pathria Homework 2Ale Gomez100% (10)
- Soal Midtest - Okt-20091 PDFDocument1 pageSoal Midtest - Okt-20091 PDFOtta Gaima SembiringPas encore d'évaluation
- MagnetismDocument11 pagesMagnetismbaymaxPas encore d'évaluation
- Fluid Properties: Density, Specific Volume, Specific Weight, Specific Gravity, and PressureDocument1 pageFluid Properties: Density, Specific Volume, Specific Weight, Specific Gravity, and PressuresolidwormPas encore d'évaluation
- High Mast Design Calculation PDFDocument24 pagesHigh Mast Design Calculation PDFSandip Sengupta60% (5)
- Dark Energy and MatterDocument6 pagesDark Energy and MatterLallu PrathapanPas encore d'évaluation
- Deflection of Structures Using Modified Betti's TheoremDocument5 pagesDeflection of Structures Using Modified Betti's TheoremfaumijkPas encore d'évaluation
- Mechanical EngineeringDocument12 pagesMechanical Engineeringanjaiah_19945100% (1)
- MECH1230 Exam Paper v4 2013 2014 SolutionsDocument18 pagesMECH1230 Exam Paper v4 2013 2014 SolutionssebPas encore d'évaluation
- Lab ReportDocument3 pagesLab ReportbluegenesterPas encore d'évaluation
- IGCSE Coordinated Science Review Notes-PhysicsDocument95 pagesIGCSE Coordinated Science Review Notes-Physicsadriana100% (1)
- 2910 8063 1 SMDocument11 pages2910 8063 1 SMAntarip PoddarPas encore d'évaluation
- PHD Application Research Proposal TemplateDocument2 pagesPHD Application Research Proposal TemplateZÄDsPas encore d'évaluation
- Adam Punt - 02-1 Finding EpicentersDocument4 pagesAdam Punt - 02-1 Finding EpicentersAdam PPas encore d'évaluation
- Open Channel Design Channels PDFDocument27 pagesOpen Channel Design Channels PDFSS100% (1)
- Chap17 SDocument90 pagesChap17 STest GgPas encore d'évaluation
- Flow of Open ChannelDocument61 pagesFlow of Open Channelmr_sam91100% (1)
- Fin Glass 6Document6 pagesFin Glass 6EIWAA100% (1)
- Tzempelikos D. Et Al - Airflow Patterns in A Laboratory Batch-Type, Tray Air Dryer - Ic-Scce2012 - ProceedingsDocument10 pagesTzempelikos D. Et Al - Airflow Patterns in A Laboratory Batch-Type, Tray Air Dryer - Ic-Scce2012 - ProceedingsAndronikos FiliosPas encore d'évaluation
- Headlamp Vibration PDFDocument8 pagesHeadlamp Vibration PDFbasavaraj mittalakattechikkappaPas encore d'évaluation
- Zimbabwe School Examinations Council Mathematics 9164/3: General Certificate of Education Advanced LevelDocument8 pagesZimbabwe School Examinations Council Mathematics 9164/3: General Certificate of Education Advanced LevelEmily NcubePas encore d'évaluation