Vous aimerez peut-être aussi
- Apuntes Procesamiento Digital de SeñalesDocument35 pagesApuntes Procesamiento Digital de Señaleshanagil_2114Pas encore d'évaluation
- Reacciones Quimicas 1 y 2Document19 pagesReacciones Quimicas 1 y 2Diana lema lemaPas encore d'évaluation
- Inspección Macal NISSAN X TRAILDocument4 pagesInspección Macal NISSAN X TRAILAndres NoriegaPas encore d'évaluation
- Aportes A La Semiótica de La Comunicación de Roland BarthesDocument9 pagesAportes A La Semiótica de La Comunicación de Roland BarthesVANS VANS100% (2)
- Suma de Matrices en DevDocument6 pagesSuma de Matrices en DevjockevandeathPas encore d'évaluation
- Guía de Práctica #2 - Teorema de TheveninDocument4 pagesGuía de Práctica #2 - Teorema de TheveninLenaPas encore d'évaluation
- Triptico Algebbra LinealDocument2 pagesTriptico Algebbra LinealjackPas encore d'évaluation
- Manual Fast ReportDocument21 pagesManual Fast ReportRigoberto Mercedes SanchezPas encore d'évaluation
- Final de Circuitos SecuencialesDocument12 pagesFinal de Circuitos SecuencialesAlfredo Cardenas SudarioPas encore d'évaluation
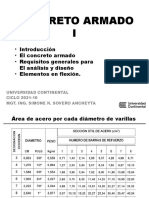
- Concreto Armado - Secciones Tipo TDocument49 pagesConcreto Armado - Secciones Tipo TDEIVIS JHOAN PANEZ RICALDIPas encore d'évaluation
- Sistema de Arranque y de Ignición en TurborreactoresDocument17 pagesSistema de Arranque y de Ignición en Turborreactoresharina95100% (3)
- Funciones Singulares PDFDocument3 pagesFunciones Singulares PDFRubersy Ramos GarcíaPas encore d'évaluation
- Taller de Probabilidades AlumnosDocument9 pagesTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASPas encore d'évaluation
- Tarea Examen Físico.Document14 pagesTarea Examen Físico.lisbeth aguialarPas encore d'évaluation
- Cartilla de Tecnologia Octubre 19Document7 pagesCartilla de Tecnologia Octubre 19Jimena BeltranPas encore d'évaluation
- 4 - CondicionalesDocument38 pages4 - CondicionaleslautaroPas encore d'évaluation
- Serie UnicoDocument4 pagesSerie UnicoArchitects UioPas encore d'évaluation
- Calculo DiferencialDocument2 pagesCalculo DiferencialjosePas encore d'évaluation
- La Celula VegetalDocument7 pagesLa Celula VegetalJULIO CESAR SOSA CHOQUEPas encore d'évaluation
- Filosofía y LógicaDocument3 pagesFilosofía y LógicaMaria Choque PacoriPas encore d'évaluation
- Experiencia 1 Mediciones Y Sus Errores. Incertidumbre, Precisión Y ExactitudDocument5 pagesExperiencia 1 Mediciones Y Sus Errores. Incertidumbre, Precisión Y ExactitudLuchoxxPas encore d'évaluation
- Cartilla de Microeconomía v1Document75 pagesCartilla de Microeconomía v1katherin natalia aristizabal cabreraPas encore d'évaluation
- Cromatos y NitruracionDocument24 pagesCromatos y NitruracionJose Canizales100% (1)
- Trabajo de Fisica IIIDocument1 pageTrabajo de Fisica IIIrosalindaPas encore d'évaluation
- Trabajo de Prueba TDocument25 pagesTrabajo de Prueba TPedro Perez0% (1)
- GuiaDocument18 pagesGuiaCharly BautistaPas encore d'évaluation
- Tema 6 - Patrones Linguisticos - Modelo MiltonDocument8 pagesTema 6 - Patrones Linguisticos - Modelo MiltonMiguel AngelPas encore d'évaluation
- YAGIDocument18 pagesYAGIRider Juan Dela Cruz CoaquiraPas encore d'évaluation
- Tarea 1 - Ejercicios eDocument19 pagesTarea 1 - Ejercicios eDiana PaolaPas encore d'évaluation
- 4 - Clase de Practica Combinacion LinealcorregidaDocument21 pages4 - Clase de Practica Combinacion LinealcorregidaJose SanchezPas encore d'évaluation