Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Classical Guitar Posture PDFDocument27 pagesClassical Guitar Posture PDFHiep NguyenVan100% (1)
- Radius Block Basics For Fingerboard LevellingDocument5 pagesRadius Block Basics For Fingerboard LevellingbentPas encore d'évaluation
- DALI H (B) ScoreDocument9 pagesDALI H (B) ScoreEdgard GuzmanPas encore d'évaluation
- Taylor Guitars Guitar Buyers Guide 2017Document117 pagesTaylor Guitars Guitar Buyers Guide 2017歐育孟Pas encore d'évaluation
- Godin Freewaysa05 PDFDocument4 pagesGodin Freewaysa05 PDFMemo Mahmut MarkuPas encore d'évaluation
- Kids Guitar Lesson 1Document13 pagesKids Guitar Lesson 1Aimee Steffenhagen0% (1)
- Framus Instr USADocument15 pagesFramus Instr USAAndres Julio Cruz PortorrealPas encore d'évaluation
- Rock Guitar BasicsDocument3 pagesRock Guitar Basicsaliscribd46Pas encore d'évaluation
- School of Shred - Paul Gilbert On The Art and Science of Playing Lead Guitar - GuitarworldDocument16 pagesSchool of Shred - Paul Gilbert On The Art and Science of Playing Lead Guitar - GuitarworldWayne White100% (2)
- Fretless BassDocument19 pagesFretless BasscisumaPas encore d'évaluation
- Orange Rock Guitar Foundation Course V1.0Document65 pagesOrange Rock Guitar Foundation Course V1.0hocusPas encore d'évaluation
- Linear: Classical Guitar Technique - A Chain Is As Strong As The Weakest LinkDocument2 pagesLinear: Classical Guitar Technique - A Chain Is As Strong As The Weakest LinkPaulo Bessa67% (3)
- NutsDocument130 pagesNutsКальков ОлександрPas encore d'évaluation
- Pentatonic Scales Sheet Music All Keys PDFDocument6 pagesPentatonic Scales Sheet Music All Keys PDFJohn JonesPas encore d'évaluation
- Harp Guitar CatalogDocument33 pagesHarp Guitar CatalogjonjammyPas encore d'évaluation
- Building My Acoustic Guitar PDFDocument56 pagesBuilding My Acoustic Guitar PDFRosa OliveiraPas encore d'évaluation
- Violao Brasileiro PDFDocument133 pagesViolao Brasileiro PDFjqnava100% (1)
- Patente LeverDocument10 pagesPatente LeverHarpa NorPas encore d'évaluation
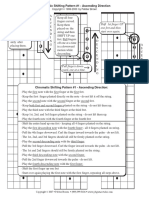
- Chromatic Shifting PatternDocument2 pagesChromatic Shifting PatternKnijo AlbertPas encore d'évaluation
- Roger Sadowsky Bass Setup PDFDocument2 pagesRoger Sadowsky Bass Setup PDFVitor GattiPas encore d'évaluation
- Dean Uli Jon Roth Sky Guitar Owners Manual PDFDocument24 pagesDean Uli Jon Roth Sky Guitar Owners Manual PDFAlexandru Buturuga0% (1)
- Guitar Hacks EbookDocument21 pagesGuitar Hacks EbookStarkey50% (2)
- Peterson StroboPlus Owner's ManualDocument18 pagesPeterson StroboPlus Owner's ManualAxe YardPas encore d'évaluation
- Pentatonics My Way Pt. 1Document6 pagesPentatonics My Way Pt. 1Mike Heugel100% (1)
- ESP 2010 CatalogDocument41 pagesESP 2010 Catalogpros1974Pas encore d'évaluation
- GuitarPro7 User GuideDocument86 pagesGuitarPro7 User GuideHaiAu2009Pas encore d'évaluation
- Jazz Guitar Scales PDFDocument7 pagesJazz Guitar Scales PDFrleyens100% (4)
- Blank Fretboard ChartDocument3 pagesBlank Fretboard ChartAlexmejia992Pas encore d'évaluation
- Care & Feeding For Martin Instruments: International EditionDocument20 pagesCare & Feeding For Martin Instruments: International Editionrizkiekananda100% (1)
- Beginners GuitarDocument74 pagesBeginners GuitarKavish SobronPas encore d'évaluation