Vous aimerez peut-être aussi
- Tos Mathematics 9 Second QuarterDocument2 pagesTos Mathematics 9 Second Quarterlee67% (6)
- Some Notes On "Modern Quantum Mechanics," by Sakurai and NapoletanoDocument24 pagesSome Notes On "Modern Quantum Mechanics," by Sakurai and NapoletanoPiLiGonzalezPas encore d'évaluation
- Some Problems of Static Analysis of Folded Plate StructuresDocument36 pagesSome Problems of Static Analysis of Folded Plate StructuresNicole PalomaresPas encore d'évaluation
- Bending of Plates - Wikipedia, The Free EncyclopediaDocument11 pagesBending of Plates - Wikipedia, The Free Encyclopediaakhilesh120Pas encore d'évaluation
- Paper 009Document9 pagesPaper 009masterumPas encore d'évaluation
- CE2254 SQDocument99 pagesCE2254 SQMigaeaPas encore d'évaluation
- Chapter 7Document11 pagesChapter 7Girma FikrePas encore d'évaluation
- Numerical Study of R.C. Beams Strengthening by External Steel PlateDocument9 pagesNumerical Study of R.C. Beams Strengthening by External Steel PlateAJER JOURNALPas encore d'évaluation
- Shapes and Sizes of Web Opening Effects On Bending Behaviour of I-Beam With Web OpeningDocument9 pagesShapes and Sizes of Web Opening Effects On Bending Behaviour of I-Beam With Web OpeningKousalya MkPas encore d'évaluation
- BsDocument55 pagesBsRuben MunteanuPas encore d'évaluation
- UNIT 2 SurveyingDocument217 pagesUNIT 2 SurveyingSHAIK MURTHUJAVALIPas encore d'évaluation
- Mohrs IntriductionDocument193 pagesMohrs IntriductionChandra ShekarPas encore d'évaluation
- 21castellated Steel BeamDocument11 pages21castellated Steel BeamHozaifaPas encore d'évaluation
- Investigation of The Oppening Effects On The Behavior of Concrete Beams Without Additional Reinforcement in Opening Region Using Fem MethodDocument12 pagesInvestigation of The Oppening Effects On The Behavior of Concrete Beams Without Additional Reinforcement in Opening Region Using Fem MethodHamza MsatatPas encore d'évaluation
- Structural Stability and Its Computational Modelling Eriksson NordmarkDocument279 pagesStructural Stability and Its Computational Modelling Eriksson NordmarkVinícius Da Cunha FerreiraPas encore d'évaluation
- Strength Analysis of Wooden Curved BeamsDocument64 pagesStrength Analysis of Wooden Curved BeamsJoão DiasPas encore d'évaluation
- Staircases: Download Civil Engineering EbookDocument38 pagesStaircases: Download Civil Engineering EbookYudirwan TanjungPas encore d'évaluation
- Welcome To The Presentation On "One Way Slab Design: Md. Asif Rahman 10.01.03.108 Dept. of CeDocument29 pagesWelcome To The Presentation On "One Way Slab Design: Md. Asif Rahman 10.01.03.108 Dept. of CeadnanPas encore d'évaluation
- NDS Drainage Catalog Apr 2010Document52 pagesNDS Drainage Catalog Apr 2010Jason BrownPas encore d'évaluation
- 04 Chapter 4 - LevelingDocument110 pages04 Chapter 4 - LevelingIsmael Wael SobohPas encore d'évaluation
- Tek 14-08BDocument14 pagesTek 14-08BMuhammad ImranPas encore d'évaluation
- Introduction To TheodoliteDocument30 pagesIntroduction To TheodoliteNene MemePas encore d'évaluation
- Measurement of Horizontal DistancesDocument47 pagesMeasurement of Horizontal DistancesRicmar MagarinPas encore d'évaluation
- Nonlinear Dynamics of Discrete and Continuous Systems: Andrei K. Abramian Igor V. Andrianov Valery A. Gaiko EditorsDocument284 pagesNonlinear Dynamics of Discrete and Continuous Systems: Andrei K. Abramian Igor V. Andrianov Valery A. Gaiko EditorsFlávio AugustoPas encore d'évaluation
- Reinforced BESSER™ Block Retaining WallsDocument16 pagesReinforced BESSER™ Block Retaining WallsromamanPas encore d'évaluation
- Wood Pole or Pile Design Based On NDS 2018: Input Data & Design SummaryDocument1 pageWood Pole or Pile Design Based On NDS 2018: Input Data & Design SummaryafvilavilanoriegaPas encore d'évaluation
- 10.1016 J.jue.2007.08.004 A Game Theoretic Analysis of SkyscrapersDocument16 pages10.1016 J.jue.2007.08.004 A Game Theoretic Analysis of SkyscrapersAr SoniPas encore d'évaluation
- Elastomeric Bearings: Background Information and Field StudyDocument106 pagesElastomeric Bearings: Background Information and Field StudyBahram HabibiPas encore d'évaluation
- Rail-Steel and Axle-Steel Deformed Bars For Concrete ReinforcementDocument5 pagesRail-Steel and Axle-Steel Deformed Bars For Concrete ReinforcementWashington JorgePas encore d'évaluation
- Iii Unit Levelling and Its ApplicationsDocument34 pagesIii Unit Levelling and Its ApplicationsNitin BhatiPas encore d'évaluation
- 29.moisture BarriersDocument31 pages29.moisture BarriersraviciviltPas encore d'évaluation
- Geodetic Leveling: Manual NOS NGS 3Document162 pagesGeodetic Leveling: Manual NOS NGS 3HazelMaeJoseRicoPas encore d'évaluation
- Structural Analysis and Design of Long Span Suspension Bridges With Regards To Nonlinearities, Uncertainties, Interactions and SustainabilityDocument9 pagesStructural Analysis and Design of Long Span Suspension Bridges With Regards To Nonlinearities, Uncertainties, Interactions and SustainabilityArunesh AzadPas encore d'évaluation
- Wongyeec 1969Document75 pagesWongyeec 1969ReemALMousawiPas encore d'évaluation
- Integral Mechanical Attachment For Timber Folded PlateDocument181 pagesIntegral Mechanical Attachment For Timber Folded PlateWika NurikaPas encore d'évaluation
- Technical Data Sheet For Post-Installed Rebar Technical Information ASSET DOC 2331222Document39 pagesTechnical Data Sheet For Post-Installed Rebar Technical Information ASSET DOC 2331222Nyan OoPas encore d'évaluation
- Brick Veneer/Concrete Masonry Walls: Technical Notes 28DDocument19 pagesBrick Veneer/Concrete Masonry Walls: Technical Notes 28DKen SuPas encore d'évaluation
- HEC 20 HydrologyDocument193 pagesHEC 20 Hydrologycarmona.eitPas encore d'évaluation
- RC T Beams Strengthened To Shear With Carbon Fiber CompositesDocument12 pagesRC T Beams Strengthened To Shear With Carbon Fiber CompositesJackson Oliveira Dos SantosPas encore d'évaluation
- Chapter Four Measuring Vertical Distance: 4.1 Introduction To LevelingDocument20 pagesChapter Four Measuring Vertical Distance: 4.1 Introduction To Levelingyared molaPas encore d'évaluation
- Detailed Overview of Steel Fiber Reinforced ConcreteDocument87 pagesDetailed Overview of Steel Fiber Reinforced ConcreteHardiantoPas encore d'évaluation
- Uni Stop PVC WaterstopDocument8 pagesUni Stop PVC WaterstopSherazPas encore d'évaluation
- Plate Dowels: An Innovation Driven by Industrial Concrete PavingDocument6 pagesPlate Dowels: An Innovation Driven by Industrial Concrete PavingRizaam Nafiz100% (1)
- Jurutera April 2013Document56 pagesJurutera April 2013adzhouPas encore d'évaluation
- FR 491Document126 pagesFR 491RAJENDRA PRASADPas encore d'évaluation
- Construction Joints: 1:3 SlopeDocument13 pagesConstruction Joints: 1:3 Slopecharles_hutabarat_2007Pas encore d'évaluation
- CH 6. StairDocument73 pagesCH 6. StairEyoatem TeferiPas encore d'évaluation
- Cost-Effective Inspection of Rebar Spacing and Cle-BolehDocument17 pagesCost-Effective Inspection of Rebar Spacing and Cle-BolehAlfadinAzzahrawaaniElNauvalPas encore d'évaluation
- Hybrid Paper 2Document222 pagesHybrid Paper 2prabindp100% (1)
- Strengthening On RC SlabsDocument16 pagesStrengthening On RC SlabsHarshPas encore d'évaluation
- AWC SDPWS2015 Commentary PrintableDocument52 pagesAWC SDPWS2015 Commentary PrintableTerry TriestPas encore d'évaluation
- Motion Based Seismic Design and Loss Estimation of Diagrid StructuresDocument83 pagesMotion Based Seismic Design and Loss Estimation of Diagrid StructuresSaba 2413Pas encore d'évaluation
- Post-Installed Rebar.: in Compliance With AS 3600-2009Document38 pagesPost-Installed Rebar.: in Compliance With AS 3600-2009caner_kurtoglu-1Pas encore d'évaluation
- Captura de Tela 2023-06-07 À(s) 16.30.51Document6 pagesCaptura de Tela 2023-06-07 À(s) 16.30.51Gon FreecsPas encore d'évaluation
- HSC Part 4 Jan23Document468 pagesHSC Part 4 Jan23Janssen Howard MendezPas encore d'évaluation
- AWC NDS2015 Commentary PrintableDocument107 pagesAWC NDS2015 Commentary PrintableTerry TriestPas encore d'évaluation
- BCM - Unit 4 - PadDocument79 pagesBCM - Unit 4 - PadPallavi DeotalePas encore d'évaluation
- Infiltration Characteristics, Performance, and Design of Storm Water FacilitiesDocument48 pagesInfiltration Characteristics, Performance, and Design of Storm Water FacilitiesDavidPas encore d'évaluation
- On The Dynamics Os Plastic Circular Plated)Document14 pagesOn The Dynamics Os Plastic Circular Plated)yasameenPas encore d'évaluation
- Analysis of Cylindrical Tanks With Flat Bases by Moment Distribution MethodDocument12 pagesAnalysis of Cylindrical Tanks With Flat Bases by Moment Distribution Methodaquibzafar100% (2)
- Abdul-Hamid Soubra Three-Dimensional Face Stability Analysis of Shallow - PDFDocument6 pagesAbdul-Hamid Soubra Three-Dimensional Face Stability Analysis of Shallow - PDFManuel Jose Parot GrevePas encore d'évaluation
- Lancellotta Spinta Passiva SismicaDocument3 pagesLancellotta Spinta Passiva Sismicafermat91Pas encore d'évaluation
- Aria Necesara de Armatura: B MM D MM KNM N/MM N/MMDocument6 pagesAria Necesara de Armatura: B MM D MM KNM N/MM N/MMRoxi BoldorPas encore d'évaluation
- Corectii Fundatii Continui - 6Document2 pagesCorectii Fundatii Continui - 6Roxi BoldorPas encore d'évaluation
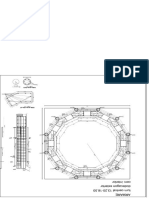
- Armare Turn CentralDocument1 pageArmare Turn CentralRoxi BoldorPas encore d'évaluation
- 22 P130 1999Document18 pages22 P130 1999bostanandaPas encore d'évaluation
- SolutionDocument9 pagesSolutionParkVegasPas encore d'évaluation
- What Is A Black Body ?Document82 pagesWhat Is A Black Body ?Ashwani RatheePas encore d'évaluation
- Ritz Method For Approximate Solution of A Variational ProblemDocument4 pagesRitz Method For Approximate Solution of A Variational Problemarohi9Pas encore d'évaluation
- Frieze PatternDocument3 pagesFrieze PatternFrancis RosalesPas encore d'évaluation
- Study of The Kitaev Models: Arnab Barman RayDocument20 pagesStudy of The Kitaev Models: Arnab Barman RayArnab Barman RayPas encore d'évaluation
- 50 Questions On Linear Algebra For NET and GATE Aspirants - Gonit Sora ( ' )Document12 pages50 Questions On Linear Algebra For NET and GATE Aspirants - Gonit Sora ( ' )Rasel IslamPas encore d'évaluation
- Physica B: Keyin Li, Kangxian Guo, Litao LiangDocument5 pagesPhysica B: Keyin Li, Kangxian Guo, Litao LiangMohamed JaawanePas encore d'évaluation
- Fpure ContentsDocument2 pagesFpure Contentsadityacsk100% (1)
- The 11 Most Beautiful EquationsDocument5 pagesThe 11 Most Beautiful EquationsgeronimlPas encore d'évaluation
- Tut 9 - PH 102 - 30052023Document1 pageTut 9 - PH 102 - 30052023PS SuryaPas encore d'évaluation
- BLOCK 2 Computer Graphics IgnouDocument87 pagesBLOCK 2 Computer Graphics IgnouDanielle PerryPas encore d'évaluation
- Bab 10 - Struktur Dan Spektra Atom - CompressedDocument14 pagesBab 10 - Struktur Dan Spektra Atom - CompressedIndah MonoarfaPas encore d'évaluation
- Vector Differentiation&Vector Integration QBDocument4 pagesVector Differentiation&Vector Integration QBS AdilakshmiPas encore d'évaluation
- Ellie Draves Unc Graph Theory FinalDocument19 pagesEllie Draves Unc Graph Theory Finalapi-290910215Pas encore d'évaluation
- Centre of Gravity and Centroids: ConceptsDocument10 pagesCentre of Gravity and Centroids: ConceptsErikPas encore d'évaluation
- The Maurer-Cartan EquationDocument2 pagesThe Maurer-Cartan EquationJohn BirdPas encore d'évaluation
- LO - Quantum Theory - Atomic Structure (CH 7) - UV-Vis Spectroscopy - Fa2021Document2 pagesLO - Quantum Theory - Atomic Structure (CH 7) - UV-Vis Spectroscopy - Fa2021zackPas encore d'évaluation
- Lecture Notes 1Document29 pagesLecture Notes 1GaeaEarthPas encore d'évaluation
- Non Linear Theory of PlasmaDocument174 pagesNon Linear Theory of PlasmaShreeyesh BiswalPas encore d'évaluation
- Maxwell Equation Term PaperDocument11 pagesMaxwell Equation Term Papershailesh singh100% (1)
- Gujarat Technological University: Subject Code: 3710802 Date: Subject Name: Computer Aided Design Time: Total Marks: 70Document2 pagesGujarat Technological University: Subject Code: 3710802 Date: Subject Name: Computer Aided Design Time: Total Marks: 70samarth sojitraPas encore d'évaluation
- 3.3 Linear TransformationsDocument6 pages3.3 Linear TransformationsLutfi Amin100% (1)
- IBPhysics Particle Practice KeyDocument2 pagesIBPhysics Particle Practice KeyOnur YavuzcetinPas encore d'évaluation
- Du Physics 2018Document6 pagesDu Physics 2018Soumyashree paridaPas encore d'évaluation
- Coulomb LawDocument3 pagesCoulomb LawJohn KolmaPas encore d'évaluation
- Matrices in Excel: Matrix A (A Row Vector) Matrix B (Square 3 X 3 Matrix) Matrix C (Column Vector)Document14 pagesMatrices in Excel: Matrix A (A Row Vector) Matrix B (Square 3 X 3 Matrix) Matrix C (Column Vector)Syed Ameer Ali ShahPas encore d'évaluation
- Lecture 6Document38 pagesLecture 6sumit kumarPas encore d'évaluation
- ES 223 Statics and Strengh of Materials: Force System ResultantsDocument6 pagesES 223 Statics and Strengh of Materials: Force System ResultantsserhatPas encore d'évaluation