Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Blender 3D - Handbook of Edit Mode (And Other Edit Tools)Document88 pagesBlender 3D - Handbook of Edit Mode (And Other Edit Tools)Philippe-Aubert Gauthier100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Summary // Philippe-Aubert GauthierDocument18 pagesSummary // Philippe-Aubert GauthierPhilippe-Aubert GauthierPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 2010 Sound Eld Reproduction Applied To Ight Vehicles Sound EnvironmentsDocument10 pages2010 Sound Eld Reproduction Applied To Ight Vehicles Sound EnvironmentsPhilippe-Aubert GauthierPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- 2008 Adaptive Wave Eld Synthesis For Active Sound Eld Reproduction: Experimental ResultsDocument12 pages2008 Adaptive Wave Eld Synthesis For Active Sound Eld Reproduction: Experimental ResultsPhilippe-Aubert GauthierPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 2011 Binaural Analysis/synthesis of Interior Aircraft SoundsDocument4 pages2011 Binaural Analysis/synthesis of Interior Aircraft SoundsPhilippe-Aubert GauthierPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 2008 Adaptive Wave Eld Synthesis For Broadband Active Sound Eld Reproduction: Signal ProcessingDocument14 pages2008 Adaptive Wave Eld Synthesis For Broadband Active Sound Eld Reproduction: Signal ProcessingPhilippe-Aubert GauthierPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- 2013 Spectral and Spatial Multichannel Analysis/Synthesis of Interior Aircraft SoundsDocument14 pages2013 Spectral and Spatial Multichannel Analysis/Synthesis of Interior Aircraft SoundsPhilippe-Aubert GauthierPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- 2011 Perceptual Evaluation of Interior Aircraft Sound ModelsDocument4 pages2011 Perceptual Evaluation of Interior Aircraft Sound ModelsPhilippe-Aubert GauthierPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- 2010 Auditory Tactics: A Sound Installation in Public Space Using Beamforming TechnologyDocument9 pages2010 Auditory Tactics: A Sound Installation in Public Space Using Beamforming TechnologyPhilippe-Aubert GauthierPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- 2005 Creative Sound Projection With Compact Loudspeaker ArraysDocument4 pages2005 Creative Sound Projection With Compact Loudspeaker ArraysPhilippe-Aubert GauthierPas encore d'évaluation
- 2004 Sound Reproduction Using Active Control Techniques: Simulations in The Frequency DomainDocument4 pages2004 Sound Reproduction Using Active Control Techniques: Simulations in The Frequency DomainPhilippe-Aubert GauthierPas encore d'évaluation
- 2014 Sound Eld Capture With Microphone Arrays, Proximity Microphones, and Optimal LtersDocument8 pages2014 Sound Eld Capture With Microphone Arrays, Proximity Microphones, and Optimal LtersPhilippe-Aubert GauthierPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 2014 Inverse Problem With Beamforming Regularization Matrix Applied To Sound Source Localization in Closed Wind-Tunnel Using Microphone ArrayDocument11 pages2014 Inverse Problem With Beamforming Regularization Matrix Applied To Sound Source Localization in Closed Wind-Tunnel Using Microphone ArrayPhilippe-Aubert GauthierPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 2006 Adaptive Wave Eld Synthesis With Independent Radiation Mode Control For Active Sound Eld Reproduction: TheoryDocument17 pages2006 Adaptive Wave Eld Synthesis With Independent Radiation Mode Control For Active Sound Eld Reproduction: TheoryPhilippe-Aubert GauthierPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- A Laboratory Technique To Compare Road Bike Dynamic ComfortDocument8 pagesA Laboratory Technique To Compare Road Bike Dynamic ComfortPhilippe-Aubert GauthierPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 2014 Sound Field Reproduction of Vibroacoustic Models: Application To A Plate With Wave Field SynthesisDocument8 pages2014 Sound Field Reproduction of Vibroacoustic Models: Application To A Plate With Wave Field SynthesisPhilippe-Aubert GauthierPas encore d'évaluation
- 2014 Sound Reproduction by Beamforming Capture and Wave Field SynthesisDocument8 pages2014 Sound Reproduction by Beamforming Capture and Wave Field SynthesisPhilippe-Aubert GauthierPas encore d'évaluation
- 2013 Aircraft Sound Environment Reproduction: Sound Field Reproduction Inside A Cabin Mock-Up Using Microphone and Actuator ArraysDocument8 pages2013 Aircraft Sound Environment Reproduction: Sound Field Reproduction Inside A Cabin Mock-Up Using Microphone and Actuator ArraysPhilippe-Aubert GauthierPas encore d'évaluation
- 2013 Objective Evaluation of Sound Eld and Sound Environment Reproduction in Aircraft Mock-Ups Using Acoustic ImagingDocument10 pages2013 Objective Evaluation of Sound Eld and Sound Environment Reproduction in Aircraft Mock-Ups Using Acoustic ImagingPhilippe-Aubert GauthierPas encore d'évaluation
- 2013 Sound Eld Reproduction of Real Ight Recordings in Cabin Mock-UpDocument10 pages2013 Sound Eld Reproduction of Real Ight Recordings in Cabin Mock-UpPhilippe-Aubert GauthierPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 2011 Derivation of Ambisonics Signals and Plane Wave Description of Measured Sound Field Using Irregular Microphone Arrays and Inverse Problem TheoryDocument17 pages2011 Derivation of Ambisonics Signals and Plane Wave Description of Measured Sound Field Using Irregular Microphone Arrays and Inverse Problem TheoryPhilippe-Aubert GauthierPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- 2006 Adaptive Wave Eld Synthesis With Independent Radiation Mode Control For Active Sound Eld ReproductionDocument12 pages2006 Adaptive Wave Eld Synthesis With Independent Radiation Mode Control For Active Sound Eld ReproductionPhilippe-Aubert GauthierPas encore d'évaluation
- 2011 Beamforming Regularization Matrix and Inverse Problems Applied To Sound Field Measurement and Extrapolation Using Microphone ArrayDocument27 pages2011 Beamforming Regularization Matrix and Inverse Problems Applied To Sound Field Measurement and Extrapolation Using Microphone ArrayPhilippe-Aubert GauthierPas encore d'évaluation
- 2007 Adaptive Wave Field Synthesis For Sound Field Reproduction: Theory, Experiments, and Future PerspectivesDocument18 pages2007 Adaptive Wave Field Synthesis For Sound Field Reproduction: Theory, Experiments, and Future PerspectivesPhilippe-Aubert Gauthier100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 2010 Sound Field Extrapolation: Inverse Problems, Virtual Microphone Arrays and Spatial FiltersDocument10 pages2010 Sound Field Extrapolation: Inverse Problems, Virtual Microphone Arrays and Spatial FiltersPhilippe-Aubert GauthierPas encore d'évaluation
- Tanya St-Pierre - Resume - 2012Document3 pagesTanya St-Pierre - Resume - 2012Philippe-Aubert GauthierPas encore d'évaluation
- 2007 Objective Evaluation of Room Effects On Wave Field SynthesisDocument13 pages2007 Objective Evaluation of Room Effects On Wave Field SynthesisPhilippe-Aubert GauthierPas encore d'évaluation
- 2011 Beamforming Regularization, Scaling Matrices and Inverse Problems For Sound Field Extrapolation and CharacterizationDocument20 pages2011 Beamforming Regularization, Scaling Matrices and Inverse Problems For Sound Field Extrapolation and CharacterizationPhilippe-Aubert GauthierPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- 2011 Beamforming Regularization, Scaling Matrices and Inverse Problems For Sound Field Extrapolation and CharacterizationDocument32 pages2011 Beamforming Regularization, Scaling Matrices and Inverse Problems For Sound Field Extrapolation and CharacterizationPhilippe-Aubert GauthierPas encore d'évaluation
- Answer Key: PHYSICS 1050 Mid-Term Test 2Document8 pagesAnswer Key: PHYSICS 1050 Mid-Term Test 2hey_hopPas encore d'évaluation
- LAB 3 AssignmentDocument8 pagesLAB 3 AssignmentKenny RPas encore d'évaluation
- Chapter 3 Kinematics in Two DimensionsDocument40 pagesChapter 3 Kinematics in Two DimensionsSam RajibPas encore d'évaluation
- Photonics NotesDocument22 pagesPhotonics NotesM A I N A K G H O S HPas encore d'évaluation
- Resonance-Kinematics PDFDocument60 pagesResonance-Kinematics PDFAnuj jainPas encore d'évaluation
- September 2012 Local Climatological Data: NOAA, National Climatic Data CenterDocument8 pagesSeptember 2012 Local Climatological Data: NOAA, National Climatic Data CenterTom JonesPas encore d'évaluation
- Unit-6 - Physics - Wave Optics (Practice and Solution)Document53 pagesUnit-6 - Physics - Wave Optics (Practice and Solution)PriyabrataTaraiPas encore d'évaluation
- What Are Electromagnetic Waves?Document67 pagesWhat Are Electromagnetic Waves?nhixolePas encore d'évaluation
- KippZonen Manual CNR4 NetRadiometer 1409Document37 pagesKippZonen Manual CNR4 NetRadiometer 1409Satria Raya PutraPas encore d'évaluation
- 65° Panel Antenna: General SpecificationsDocument2 pages65° Panel Antenna: General SpecificationsYns KlcPas encore d'évaluation
- Chapter 2: Reflection and Refraction PhysicsDocument31 pagesChapter 2: Reflection and Refraction PhysicsKathleen Joy ArutaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Answer Key Lets Catch A WaveDocument3 pagesAnswer Key Lets Catch A WavejohndepoPas encore d'évaluation
- Reports on Progress in Physics: Some Aspects of Diffraction Theory and their Application to the IonosphereDocument81 pagesReports on Progress in Physics: Some Aspects of Diffraction Theory and their Application to the IonosphereDean HazinehPas encore d'évaluation
- Flow Measurements Manual Rev 24 Nov 2017 1Document12 pagesFlow Measurements Manual Rev 24 Nov 2017 1mike.stavrianakos2717Pas encore d'évaluation
- Forces and MotionDocument42 pagesForces and MotionJulius Memeg PanayoPas encore d'évaluation
- 02 Clicker QuestionsDocument36 pages02 Clicker QuestionsBryan TongPas encore d'évaluation
- Protection Against Neutron Radiation: CouncilDocument159 pagesProtection Against Neutron Radiation: CouncilFernanda MouraPas encore d'évaluation
- Understanding Heat and ThermodynamicsDocument29 pagesUnderstanding Heat and ThermodynamicsPrasanna VijayakumarPas encore d'évaluation
- AP Physics C Mechanics Cram Chart 2021Document1 pageAP Physics C Mechanics Cram Chart 2021Denise WongPas encore d'évaluation
- Folded Dipole Antenna: Presented By: Navin Mandal (700415)Document18 pagesFolded Dipole Antenna: Presented By: Navin Mandal (700415)Narayan Mishra MishraPas encore d'évaluation
- Igcse Sound Physics PowerpointDocument28 pagesIgcse Sound Physics Powerpointmaryam2024igcsePas encore d'évaluation
- BiomechanicsDocument18 pagesBiomechanicsSmn RajaPas encore d'évaluation
- Lecture 4 - Heat Gain in BuildingDocument28 pagesLecture 4 - Heat Gain in BuildingZHI YI SOOPas encore d'évaluation
- Optical FibreDocument43 pagesOptical FibreArundhati Kulkarni100% (1)
- St. Nicholas Academy Castillejos, Zambales S.Y. 2012-2013Document5 pagesSt. Nicholas Academy Castillejos, Zambales S.Y. 2012-2013Rina TolentinoPas encore d'évaluation
- Testbank Chapter15Document11 pagesTestbank Chapter15AnaMendezPas encore d'évaluation
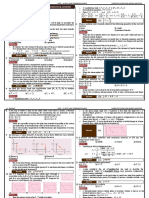
- Maxwell's Equations and Electromagnetic WavesDocument8 pagesMaxwell's Equations and Electromagnetic WavesAbdallah IslaihPas encore d'évaluation
- Ray Optics and Optical Instruments - Short Notes - Lakshya JEE 2024Document4 pagesRay Optics and Optical Instruments - Short Notes - Lakshya JEE 2024bhaveshkumarbijaniPas encore d'évaluation
- Apxvllll15b - 43 C I20Document4 pagesApxvllll15b - 43 C I20jbermeo10Pas encore d'évaluation
- 1e PDFDocument8 pages1e PDFEmir RubliovPas encore d'évaluation
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseD'EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseÉvaluation : 4.5 sur 5 étoiles4.5/5 (50)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionD'EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsD'EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsD'EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsPas encore d'évaluation
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationD'EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationÉvaluation : 4 sur 5 étoiles4/5 (18)