Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Fazel SeyedDocument184 pagesFazel SeyedDarshan PatelPas encore d'évaluation
- Embedded System LabDocument62 pagesEmbedded System Labfatima100% (1)
- Smart Surveillance RoverDocument5 pagesSmart Surveillance RoverSauravPas encore d'évaluation
- Chopper ReportDocument37 pagesChopper ReportcoolsinghrkPas encore d'évaluation
- G22LWK and 22LWK Service ManualDocument44 pagesG22LWK and 22LWK Service ManualBogus MalogusPas encore d'évaluation
- Pick and Place Robotic Arm Research PaperDocument5 pagesPick and Place Robotic Arm Research PaperChinmay ChaturvediPas encore d'évaluation
- Os 12699 16 - Igbt ConverterDocument4 pagesOs 12699 16 - Igbt ConverterkasiiiiiPas encore d'évaluation
- Spi Controlled H-Bridge: 1 FeaturesDocument23 pagesSpi Controlled H-Bridge: 1 Featuresazz zinouPas encore d'évaluation
- Project Report On Android Application Controlled Spy RobotDocument14 pagesProject Report On Android Application Controlled Spy RobotanumPas encore d'évaluation
- A Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesDocument10 pagesA Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesraghuaadsPas encore d'évaluation
- Control of Stepping Motors PDFDocument226 pagesControl of Stepping Motors PDFJose MolinaPas encore d'évaluation
- Arduino Robot KitDocument12 pagesArduino Robot KitRohit Vaishampayan100% (1)
- Gesture Controlled WheelchairDocument22 pagesGesture Controlled Wheelchairsairam saiPas encore d'évaluation
- A Fast-Acting DC-Link Voltage Controller For Three-Phase DSTATCOM To Compensate AC and DC LoadsDocument6 pagesA Fast-Acting DC-Link Voltage Controller For Three-Phase DSTATCOM To Compensate AC and DC LoadsSanthosh GuduruPas encore d'évaluation
- Chapter 6 Conclusion and SuggestionsDocument3 pagesChapter 6 Conclusion and SuggestionsZul Hairey100% (2)
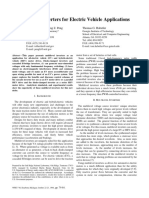
- Multilevel Inverters For Electric Vehicle Applications: Leon M. Tolbert Fang Z. Peng Thomas G. HabetlerDocument6 pagesMultilevel Inverters For Electric Vehicle Applications: Leon M. Tolbert Fang Z. Peng Thomas G. HabetlerdevPas encore d'évaluation
- Tpa3122d2 PDFDocument21 pagesTpa3122d2 PDFalbertPas encore d'évaluation
- DeviceCraftDCmotorController 1015BDocument24 pagesDeviceCraftDCmotorController 1015BbetortitaPas encore d'évaluation
- 9019Document17 pages9019Dan Esenther100% (1)
- THD Analysis of Cascaded Multi Level Inverters Using Different PWM TechniquesDocument4 pagesTHD Analysis of Cascaded Multi Level Inverters Using Different PWM TechniquesEditor IJTSRDPas encore d'évaluation
- Small DC Motor Control by PWM Method Using Atmega8Document4 pagesSmall DC Motor Control by PWM Method Using Atmega8Emin KültürelPas encore d'évaluation
- V01I031119Document7 pagesV01I031119IJARTETPas encore d'évaluation
- Microcontroller Based Rail Tracking and Accident Avoidance SystemDocument3 pagesMicrocontroller Based Rail Tracking and Accident Avoidance SystemMamatha MarriPas encore d'évaluation
- Low-Cost Bidirectional Brushed DC Motor Control PDFDocument16 pagesLow-Cost Bidirectional Brushed DC Motor Control PDFjohnjoviedoPas encore d'évaluation
- Solar Based 3-Phase Net Metering System: NAMESDocument39 pagesSolar Based 3-Phase Net Metering System: NAMESRasheed ShahPas encore d'évaluation
- Polyswitch Circuit Protection Products Catalog PDFDocument254 pagesPolyswitch Circuit Protection Products Catalog PDFRuben JimenezPas encore d'évaluation
- Home Automation and Security SystemDocument27 pagesHome Automation and Security SystemVeena Juluri50% (4)
- L298N Motor DriverDocument7 pagesL298N Motor DrivercerenautaPas encore d'évaluation
- DC Motor Interfacing and PWMDocument22 pagesDC Motor Interfacing and PWMkumarstsPas encore d'évaluation
- IipDocument7 pagesIipAnjali ThackerPas encore d'évaluation