Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Quantitative Aptitude by R. S. AgrawalDocument737 pagesQuantitative Aptitude by R. S. AgrawalPritum Suthar100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- CEED Sample PaperDocument41 pagesCEED Sample PaperAnushka SaxenaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Ceed 2015Document27 pagesCeed 2015Divya S KumarPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Diff BWT Is 800 101Document96 pagesDiff BWT Is 800 101tops123Pas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Q. 1 - Q. 25 Carry One Mark EachDocument12 pagesQ. 1 - Q. 25 Carry One Mark EachPritum SutharPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Gate Ece by RK - KanodiaDocument440 pagesGate Ece by RK - KanodiaParitam Soni100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
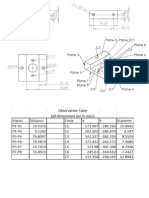
- 3D Drawing of CMM SpecimenDocument1 page3D Drawing of CMM SpecimenPritum SutharPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Auto Power ManualDocument97 pagesAuto Power ManualAngel100% (1)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- OSI ModelDocument23 pagesOSI ModelBijay LamaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- CV7001 Part 1 NoteDocument267 pagesCV7001 Part 1 NoteasdasPas encore d'évaluation
- EPANET Calibrator ManualDocument8 pagesEPANET Calibrator ManualWesley AmorimPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- NGSPICE Manual-Devices and Circuits LabDocument15 pagesNGSPICE Manual-Devices and Circuits LabShreya R HPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Ls ComandsDocument63 pagesLs ComandsNagella AnilkumarPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Learning Disabilities 2Document29 pagesLearning Disabilities 2Sarah Emmanuel HaryonoPas encore d'évaluation
- Cs8493 Operating System 3Document37 pagesCs8493 Operating System 3alexb072002Pas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Acquisition Plan Template - Updated 9.1.21Document19 pagesAcquisition Plan Template - Updated 9.1.21Edgar De LeonPas encore d'évaluation
- Aspire Company Profile:, Aspire Exam Cracking KITDocument17 pagesAspire Company Profile:, Aspire Exam Cracking KITChandrasekhar Uchiha100% (1)
- Project 1914198Document30 pagesProject 1914198abhishek malhotraPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Question Text: Complete Mark 1.00 Out of 1.00Document39 pagesQuestion Text: Complete Mark 1.00 Out of 1.00Muhammad AliPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Rre Ry Ry1 A2a MP014 Pe CH STX B01 DWG 00901Document1 pageRre Ry Ry1 A2a MP014 Pe CH STX B01 DWG 00901md_rehan_2Pas encore d'évaluation
- PHP ReadmeDocument3 pagesPHP ReadmeAdita Rini SusilowatiPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Delgado Juan, AnaDocument62 pagesDelgado Juan, AnaGabriel AlbornosPas encore d'évaluation
- Kisi-Kisi Web Technologies 2023Document36 pagesKisi-Kisi Web Technologies 2023Erhamna noor riskiPas encore d'évaluation
- Computer Security EITA25: Final Exam inDocument6 pagesComputer Security EITA25: Final Exam inGeorges karamPas encore d'évaluation
- Rest Security by Example Frank KimDocument62 pagesRest Security by Example Frank KimneroliangPas encore d'évaluation
- Essentials of Investments 8th Edition Bodie Test BankDocument22 pagesEssentials of Investments 8th Edition Bodie Test BankJoanSmithrgqb100% (47)
- SAPDocument19 pagesSAPdzulfatuhPas encore d'évaluation
- COMM 614 Ethical Issues in CommunicationsDocument10 pagesCOMM 614 Ethical Issues in CommunicationsLiz Horgan100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- PLCDocument936 pagesPLCjulio cidPas encore d'évaluation
- Formulae For Vendor RatingDocument3 pagesFormulae For Vendor RatingMadhavan RamPas encore d'évaluation
- Sample Swot For An InstitutionDocument8 pagesSample Swot For An Institutionhashadsh100% (3)
- Adhiraj Singh ParmarDocument2 pagesAdhiraj Singh ParmarAshok SambasivanPas encore d'évaluation
- Core Dump Management On The Solaris OSDocument9 pagesCore Dump Management On The Solaris OSKavita SainiPas encore d'évaluation
- School of Science and Engineering: Experiment No-05Document4 pagesSchool of Science and Engineering: Experiment No-05Mohammad PabelPas encore d'évaluation
- Likpin Job Offer Contract - Appointment Letter SoftDocument5 pagesLikpin Job Offer Contract - Appointment Letter SoftYasirIqbalPas encore d'évaluation
- Statistische Tabellen (Studenmund (2014) Using Econometrics. A Practical Guide, 6th Ed., P 539-553)Document15 pagesStatistische Tabellen (Studenmund (2014) Using Econometrics. A Practical Guide, 6th Ed., P 539-553)Рус ПолешукPas encore d'évaluation
- Deep LearningDocument34 pagesDeep Learningtheepi murugesanPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)