Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 37270a QUERCUS GBDocument6 pages37270a QUERCUS GBMocanu Romeo-CristianPas encore d'évaluation
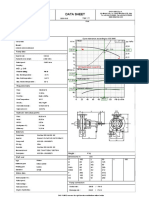
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 pagesData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaPas encore d'évaluation
- Chen 2021Document13 pagesChen 2021Aitor UzkudunPas encore d'évaluation
- Climatol GuideDocument40 pagesClimatol GuideFressiaPas encore d'évaluation
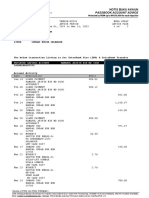
- RHB Islamic Bank BerhadDocument2 pagesRHB Islamic Bank BerhadVape Hut KlangPas encore d'évaluation
- 1974 - Roncaglia - The Reduction of Complex LabourDocument12 pages1974 - Roncaglia - The Reduction of Complex LabourRichardPas encore d'évaluation
- Routine (27th April)Document1 pageRoutine (27th April)SoumitPas encore d'évaluation
- Jungles & SavannasDocument80 pagesJungles & SavannasJessica100% (1)
- 2SA1016Document4 pages2SA1016catalina maryPas encore d'évaluation
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocument26 pagesMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonPas encore d'évaluation
- WAM ES Screw Conveyors Manual JECDocument43 pagesWAM ES Screw Conveyors Manual JECabbas tawbiPas encore d'évaluation
- ADAMS/View Function Builder: Run-Time FunctionsDocument185 pagesADAMS/View Function Builder: Run-Time FunctionsSrinivasarao YenigallaPas encore d'évaluation
- Business Logic Module 1Document5 pagesBusiness Logic Module 1Cassandra VenecarioPas encore d'évaluation
- Electronics 12 00811Document11 pagesElectronics 12 00811Amber MishraPas encore d'évaluation
- Hawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersDocument133 pagesHawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersTinsae LirePas encore d'évaluation
- Advanced Work Packaging: A Fit For Purpose ApproachDocument17 pagesAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungPas encore d'évaluation
- Grimm (2015) WisdomDocument17 pagesGrimm (2015) WisdomBruce WaynePas encore d'évaluation
- Class I Water Well: DescriptionDocument10 pagesClass I Water Well: DescriptionJavier Andrés Acevedo GarcíaPas encore d'évaluation
- Analysis of Green Entrepreneurship Practices in IndiaDocument5 pagesAnalysis of Green Entrepreneurship Practices in IndiaK SrivarunPas encore d'évaluation
- Sentence Diagramming:: Prepositional PhrasesDocument2 pagesSentence Diagramming:: Prepositional PhrasesChristylle RomeaPas encore d'évaluation
- Standard Dimensions Grooved and Shouldered Joints AMERICAN - The Right WayDocument2 pagesStandard Dimensions Grooved and Shouldered Joints AMERICAN - The Right WaySopon SrirattanapiboonPas encore d'évaluation
- Agenda - Meeting SLC (LT) - 27.06.2014 PDFDocument27 pagesAgenda - Meeting SLC (LT) - 27.06.2014 PDFharshal1223Pas encore d'évaluation
- OOPS KnowledgeDocument47 pagesOOPS KnowledgeLakshmanPas encore d'évaluation
- DICKSON KT800/802/803/804/856: Getting StartedDocument6 pagesDICKSON KT800/802/803/804/856: Getting StartedkmpoulosPas encore d'évaluation
- EF3e Intplus Filetest 10aDocument4 pagesEF3e Intplus Filetest 10aLin Shufen100% (1)
- PhotometryDocument2 pagesPhotometryHugo WPas encore d'évaluation
- Slipform Construction TechniqueDocument6 pagesSlipform Construction TechniqueDivyansh NandwaniPas encore d'évaluation
- History Homework Help Ks3Document8 pagesHistory Homework Help Ks3afetnjvog100% (1)
- Phase DiagramDocument3 pagesPhase DiagramTing TCPas encore d'évaluation
- The Role of Needs Analysis in Adult ESL Programme Design: Geoffrey BrindleyDocument16 pagesThe Role of Needs Analysis in Adult ESL Programme Design: Geoffrey Brindleydeise krieser100% (2)