Académique Documents
Professionnel Documents
Culture Documents
Guia2 Eca311
Transféré par
MMMahuaTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Guia2 Eca311
Transféré par
MMMahuaDroits d'auteur :
Formats disponibles
1
2 Guia de Laboratrio de ECA311
Simulaes de sistemas dinmicos no domnio do tempo e da freqncia.
Anlises de estabilidade. Compensaes de malhas de controle.
Experincia prtica com sistema de nvel.
Nome ______________________________________ N de Matrcula:_________
Nome ______________________________________ N de Matrcula:_________
Nome ______________________________________ N de Matrcula:_________
Descrio Geral
A finalidade deste laboratrio mostrar simulaes no domnio do tempo e da frequncia
de sistemas dinmicos e de malhas de controle. Ser realizada tambm uma experincia prtica
com um processo de nvel.
Parte I Simulaes no domnio do tempo e da freqncia.
1
a
) Ser simulado o modelo de uma funo de 1
o
ordem y(s)/u(s) = G(s) = K/(.s + 1), como a de
um circuito RC onde K = 1 e = RC. Sejam os valores R = 10 [K] e C = 100 [uF] definindo
= 1. Os comandos abaixo realizam a simulao da resposta ao degrau do modelo.
N = 1; D = [1 1];
step(N,D)
a) Anotar o valor em regime permanente da varivel y(t) simulada.
Resposta: _____________________________________________________________________ .
b) Para obter a resposta em freqncia do modelo basta realizar os comandos:
bode(N,D)
c) Anotar a tendncia da inclinao da curva do mdulo pela freqncia. Anotar tambm a faixa
aproximada da variao da fase.
Respostas: ____________________________________________________________________ .
2
a
) Nesta questo ser mostrado como simular um modelo de sistema que tenha uma funo de
segunda ordem do tipo G(s) = W
n
2
/(s+2 W
n
s+W
n
2
). Como exemplo ser utilizado o modelo de
um circuito RLC. Sejam os valores R = 30 [ ], C = 27 [uF] e L = 100 [mH], a funo de
transferncia correspondente pode ser representada por G(s) = 1/(LCs
2
+ RCs + 1). Os parmetros
bsicos da funo de transferncia padro esto indicados a seguir.
.
2
R
;
1
L
C
LC
Wn = =
2
a) Entrar com os valores especificados e obter os parmetros da funo:
R=30; C=27e-6; L=100e-3;
Wn = 1/sqrt(L*C)
eta = 0.5*R*sqrt(C/L)
b) Anotar os valores dos parmetros da funo padro.
Respostas: Wn = ____________________ ; = _____________________ .
c) Para simular o sistema para uma entrada degrau, digitar na rea de trabalho os comandos:
N=Wn^2; D=[1 2*eta*Wn Wn^2];
step(N,D)
d) Anotar o valor do mximo pico (Yp) da resposta temporal do sistema e o seu tempo de
ocorrncia (Tp) usando o comando [t,y]=ginput(1) .
Respostas: ____________________________________________________________________.
e) Os plos do sistema podem ser obtidos atravs do comando roots(D). Com o fator de
amortecimento ( ) do modelo era de se esperar razes complexas? Justificar.
Respostas: ____________________________________________________________________
_____________________________________________________________________________ .
f) Para obter a resposta em freqncia (diagrama de Bode) da funo de transferncia em questo
basta executar o comando abaixo.
bode(N,D)
g) Verifique no grfico se para a freqncia Wn o valor do mdulo mximo e se a fase est em
-90
o
. Verificar se a partir desta freqncia a curva da magnitude (ou mdulo) cai assintoticamente
-40 [dB]/dcada de freqncia.
Respostas: ____________________________________________________________________
_____________________________________________________________________________.
3
a
) A equao C(s) = u(s)/e(s) = (Kp.s+Ki)/s representa a funo de um controlador PI.
Admitindo os ganhos Kp = 3 e Ki = 2, a funo resultante C(s) = N(s)/D(s) = (3s+2)/s. Obter a
resposta em freqncia da funo de transferncia usando os comandos:
N=[3 2]; D=[1 0];
bode(N,D)
a) Verifique para a freqncia dada por Ki/Kp = 2/3 = 0,667 [rd/s] se o valor da fase est em -45
o
.
A informao definida pela relao Ki/Kp conhecida como freqncia de canto. Verifique se
antes deste valor se a curva de magnitude cai assintoticamente -20 [dB]/dcada de freqncia. A
partir da freqncia de canto o valor do mdulo da resposta permanece em torno de 20.Log(Kp)?
3
Respostas: ____________________________________________________________________
_____________________________________________________________________________.
b) Observando a curva de magnitude, qual o comportamento do mdulo de um PI em relao
freqncia: passa-baixas, passa-faixa ou passa-altas?
Resposta: ____________________________________________________________________ .
c) Observando a curva de fase, qual o comportamento do PI: avano ou atraso de fase?
Resposta: ____________________________________________________________________ .
Parte II Anlises de malha de controle no domnio da freqncia.
A figura abaixo ilustra uma malha de controle bsica. C(s) a funo de transferncia do
controlador utilizado e G(s) a funo do processo controlado. C(s)G(s), ou G(s), conhecida
como funo de malha aberta, e y(s)/r(s)=C(s)G(s)/(1+C(s)G(s)) como funo de malha fechada.
Como exemplo ser empregado um sistema modelado por
) 2 )( 1 (
8
) (
+ +
=
s s s
s G .
1) Neste item sero utilizados diagramas de Nyquist e Bode para analisar a estabilidade da malha
de controle, que neste exemplo empregar um controlador proporcional C(s) = Kp. O critrio de
Nyquist usa a expresso Z = P + N, onde a malha de controle ser estvel para Z = 0
(significando que no existe nenhum plo em malha fechada com parte real positiva). P o
nmero de plos com parte real positiva da funo em malha aberta. N o nmero de contornos
(negativo se estiver no sentido anti-horrio e positivo caso contrrio) do grfico de Nyquist em
torno do ponto 1 + j0. Em um diagrama de Bode a estabilidade pode ser analisada verificando se
existe uma freqncia (chamada de cruzamento de ganho ou Wcg) onde a curva do mdulo cruza
a linha de 0 dB. Se para esta freqncia na curva de fase, se o ngulo da funo C(jWcg)G(jWcg)
estiver acima de -180
0
ou se a margem de fase (MF = 180
0
- C(jWcg)G(jWcg)) positiva,
ento a malha estvel.
a) Ser utilizado um programa a seguir que constitudo de um conjunto de comandos de linha
do MatLab, cuja finalidade gerar diagramas de Nyquist e de Bode de C(jW)G(jW), e a resposta
ao degrau da malha fechada. Fechar as figuras das simulaes anteriores. Abrir na pasta ECA311
o programa Lab2_eca311_pr1. Executar o mesmo e entrar com o valor do ganho Kp = 0.125.
Verificar as figuras geradas e anotar as informaes solicitadas a seguir. Usar o comando
[x,z]=ginput(1) sobre a figura selecionada para ler os pontos de interesse dos grficos. Anotar
tambm o valor do mximo pico (Mp) e do seu respectivo tempo (Tp) da resposta temporal da
sada da malha de controle simulada.
r +
-
C(s) G(s) y
e u
4
P = _____ ; N = _____ ; Z = _____; Malha [estvel ou instvel?] = _________________ ;
Wcg = _______ ; MF = ________ ; Malha [estvel ou instvel?] = _________________ ;
Mp = _______________________ ; Tp = _______________________.
b) Executar novamente o programa anterior com Kp = 0.25 e anotar as informaes:
P = _____ ; N = _____ ; Z = _____; Malha [estvel ou instvel?] = _________________ ;
Wcg = _______ ; MF = ________ ; Malha [estvel ou instvel?] = _________________ ;
Mp = _______________________ ; Tp = _______________________.
c) Idem para Kp = 1 anotando as informaes abaixo.
P = _____ ; N = _____ ; Z = _____; Malha [estvel ou instvel?] = _________________ ;
Wcg = _______ ; MF = ________ ; Malha [estvel ou instvel?] = _________________ .
d) Em geral quanto maior a margem de fase (MF), menor o mximo pico (MP) da resposta
temporal de um sistema de controle. E quanto maior a freqncia de cruzamento de ganho (Wcg),
mais rpida a resposta da malha de controle, p. ex., Tp. Explicar com as informaes dos itens (a)
e (b) as modificaes nas respostas temporais da malha para Kp = 0,125 e para Kp = 0,25.
Respostas: ____________________________________________________________________
_____________________________________________________________________________ .
2) Este item empregar o diagrama de Nichols da funo de malha aberta e a resposta em
freqncia em malha fechada, para prever o mximo pico da resposta temporal da malha de
controle relacionada com a primeira questo. Ser utilizado agora a funo de um controlador
PD, cuja expresso dada por C(s) = Kp + sKd e onde Kp = 0,4 e Kd = 1. Apagar as figuras das
simulaes anteriores. Abrir o programa Lab2_eca311_pr2 e executar o mesmo. Das informaes
das figuras geradas, anotar os dados correspondentes e responder as questes a seguir.
a) Como o grfico de C(jW)G(jW) est relacionado com as curvas individuais dos grficos de
C(jW) e de G(jW)? Anotar os valores de Wcg e de MF da funo C(jW)G(jW).
Resposta: ____________________________________________________________________ .
Wcg = ______________ ; MF = ______________ .
b) Usando o diagrama de Nichols verificar qual curva M (as curvas tracejadas com indicaes em
dB) tangencia o grfico de C(jW)G(jW). Qual a estimativa do mximo pico da resposta temporal
a entrada degrau em malha fechada a partir da informao de malha aberta? Sabe-se que
Mp=10
(M/20)
da definio de escalas em decibis.
M [dB] = => Mp =
5
c) Utilizar agora a informao do grfico de malha fechada, anotando o valor mximo (M) da
curva do mdulo de C(jW)G(jW)/(1 + C(jW)G(jW)), objetivando estimar o mximo pico da
resposta temporal da malha de controle para uma entrada em degrau.
d) O tempo de resposta da malha de controle indicado por Tp, por exemplo, melhor para o
compensador PD do que para o controlador P da primeira questo? Justificar.
Respostas: _______________________________________________________________
________________________________________________________________________ .
Parte III Compensao por mtodos de resposta em freqncia.
1) Seja um sistema de controle de nvel, onde o processo controlado tem um modelo aproximado
dado por G(s) = 16/(80s+1). Na malha de controle deste processo um controlador PI foi
empregado com a finalidade de impor erro nulo em regime permanente para entrada degrau e
rejeitar eventuais perturbaes. As especificaes no domnio da freqncia foram: Wcg = 0,85
[rd/s]; MF = 52
o
. Os ganhos Kp e Ki do controlador podem ser calculados utilizando conceitos de
resposta em freqncia:
). / ( tan ) ( ; / ) (
; 180 ) ( ) ( ) ( ) (
; 1 ) ( . ) ( ) ( ) (
1 2 2 2
0
WcgKp Ki jWcg C Wcg Ki Kp jWcg C
MF jWcg G jWcg C jWcg G jWcg C
jWcg G jWcg C jWcg G jWcg C
= + =
= + =
= =
a) Os clculos podem ser realizados facilmente atravs de calculadoras com funes
trigonomtricas e nmeros complexos. Neste item ser mostrado como utilizar algumas funes
matemticas do MatLab para realizar esses clculos. Efetuar os procedimentos abaixo:
GWcg = 16/(i*0.85*80+1)
ModGWcg = abs(GWcg)
FasGWcg = (180/pi)*angle(GWcg)
ModCWcg = 1/ModGWcg
FasCWcg = 52 180 - FasGWcg
Arg_FasCWcg = tan(pi*FasCWcg/180)
b) Usando os valores obtidos no item anterior vm 4,2505
2
= Kp
2
+ Ki
2
/0,85
2
e
0,8052 = Ki/0,85Kp. Resolvendo as equaes tm-se Kp 3,2 e Ki 2,2.
c) Para verificar se as especificaes no domnio da freqncia foram alcanadas com os ganhos
calculados, pode-se gerar a resposta de C(jW)G(jW) conforme os passos abaixo.
M [dB] = => Mp =
6
Nc=[3.2 2.2]; Dc=[1 0];
Ng=16; Dg=[80 1];
[No,Do] = series(Nc,Dc,Ng,Dg);
bode(No,Do)
d) Anotar os valores obtidos de Wcg e MF da resposta em freqncia da malha compensada.
Verificar se os valores esto prximos das especificaes indicando uma compensao adequada.
Respostas: ____________________________________________________________________
_____________________________________________________________________________ .
e) A resposta temporal da malha de controle para uma entrada degrau unitrio pode ser obtida por
meio dos comandos abaixo.
[Nc,Dc] = cloop(No,Do);
step(Nc,Dc)
f) Anotar os valores aproximados do mximo pico e do tempo de acomodao da malha de
controle simulada.
Respostas: ____________________________________________________________________ .
2) Existem vrias expresses conhecidas para calcular parmetros de controladores no domnio
da freqncia, como por exemplo, as mostradas abaixo.
); ( -180 ;
1
) ( . .
o
0
jWcg G MF
e
s G Ki s
ss
s
n
+ = =
=
.
G(jWcg) .
sin
Kd ;
) (
cos
2
Wcg
Ki
Wcg jWcg G
Kp + = =
a) Os clculos podem ser realizados facilmente atravs de calculadoras com funes
trigonomtricas e nmeros complexos. Neste guia ser mostrado como utilizar algumas funes
matemticas do MatLab para realizar esses clculos. O exemplo o mesmo da questo anterior.
Efetuar os comandos seguintes:
teta = -pi+(pi*52/180)-pi*FasGWcg/180
Kp = (cos(teta))/ModGWcg
Ki = -0.85* (sin(teta))/ModGWcg
b) Anotar os valores dos ganhos obtidos (como usado um PI o ganho Kd nulo).
Respostas: Kp = __________________ ; Ki = _________________ .
c) O ganho Ki tambm poderia ser calculado a partir da especificao do erro em regime
permanente (e
ss
) para uma entrada tipo rampa no exemplo em questo. Para o valor Ki calculado,
7
estimar qual seria o valor do erro esperado. Lembrar que a funo G(s) no apresenta plos na
origem, logo o sistema do tipo 0 (n = 0), portanto na expresso correspondente vem:
1 * 2,2 * 16 = 1/e
ss
.
Resposta: e
ss
= ________________ .
Parte IV Experincia com Sistema de Controle de Nvel
1) O objetivo deste ensaio mostrar uma experincia com um sistema de controle de nvel. Ser
utilizado um modelo de uma planta em escala reduzida para exemplificar um processo de nvel.
Uma moto-bomba eletricamente comandada bombeia um lquido (gua) de um reservatrio para
um tanque onde existe um transdutor capacitivo de medio de nvel. Um amplificador eletrnico
de potncia (driver) aciona a moto-bomba. Os diversos componentes eletrnicos na placa do
mdulo realizam os condicionamentos de sinais necessrios para o adequado funcionamento do
sistema. Uma pequena placa externa de circuito impresso (fixada em um conector na parte
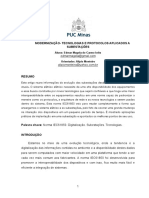
inferior do mdulo) realiza um controlador PI. A figura a seguir ilustra o circuito bsico do
controlador.
R1
T_pot
+15V
+
-
3
2
+15V
-15V
4
1
1
1
LM324
A
A Sensor
R5
GND
Leitura
(0 a 5V)
Referncia
(0 a 5V)
R3
R2
R4
-
+
GND
13
12
14
D
-
+
GND
6
5
7
B
R6
R7
-
+
GND
9
10
8
C
R8
R9
D1
+ -
C1
Vc
O compensador PI implementado pelo amplificador operacional B do esquemtico. Os
resistores R2 e R3 tm valores de 5 [K], R6 de 15 [K] e C1 de 100 [uF]. Estes
componentes definem os ganhos Kp = 3 e Ki = 2 em valores prximos aos calculados
anteriormente. O sinal de referncia vem de um potencimetro na placa externa, a informao de
nvel vem do sinal do transdutor/sensor devidamente processado pelos circuitos eletrnicos do
mdulo, e o sinal resultante de comando Vc ativa o driver da moto-bomba. Os outros
amplificadores esto ligados como seguidor e inversores de ganhos unitrios. O resistor R9 e o
diodo zener D1 realizam um limitador da informao Vc na faixa de 0 a 5 [V]. Pode haver
limitaes na integrao da informao realizada no capacitor C1 tambm (por meio do uso de
diodo e resistores adequadamente ligados ao circuito em questo).
8
a) Abrir na pasta ECA311 o programa Lab2_eca311_pr3. O mesmo modela no ambiente
Simulink as no-linearidades tpicas da malha de controle real. Executar o programa e verificar
na tela Scope as informaes da entrada e da sada da malha para uma entrada degrau com um
valor de referncia de 8 unidades de nvel. Observar que a entrada de comando da planta fica
saturada durante certo tempo nos limites de atuao (0 e 5). Isto faz com que a resposta da malha
apresente um mximo pico menor, entretanto o tempo de acomodao aumenta em relao
simulao realizada anteriormente.
b) Agora ser realizada uma experincia prtica utilizando o modelo em escala reduzida citado.
Ligar a fonte de alimentao do equipamento por meio de uma chave na parte de trs do mdulo.
O compensador foi construdo para controlar o nvel no tanque superior do processo na faixa de 4
a 10 [cm], tomando como referncia a escala fixada na parede do reservatrio. Variar suavemente
o potencimetro de ajuste de referncia da malha de controle (situado na placa externa fixada no
mdulo do equipamento) no sentido horrio, objetivando estabelecer um nvel desejado no
sistema, por exemplo, em torno de 5 a 6 [cm].
c) Esperar o nvel estabilizar em torno do valor desejado, se necessrio fazer pequenos ajustes na
posio do potencimetro de referncia at obter o valor na faixa desejada. As informaes
relacionadas com a atuao da servo-bomba e o nvel do processo podem ser visualizadas e
registradas por meio de um sistema de aquisio de dados ou por um osciloscpio digital. Ligar o
osciloscpio utilizado na experincia e verificar o grfico da tenso relacionada com informao
do transdutor de nvel do processo. Variar o potencimetro de ajuste de referncia da malha de
controle para estabelecer outro nvel, por exemplo, com um deslocamento de aproximadamente
1/8 de volta no mesmo objetivando estabelecer um novo nvel no processo na faixa de 8 a 9 [cm].
Observar o grfico da resposta na tela do osciloscpio. Quanto o grfico estiver atualizado em
praticamente toda a tela do instrumento, pressionar o boto RUN do mesmo.
d) Realizar os seguintes procedimentos abaixo no osciloscpio visando estimao do mximo
pico da resposta temporal da malha.
I- Pressionar o boto Cursors e selecionar na opo Source o item CH1.
II- Acionar na opo Type => Voltage e pressionar o boto Cur 1 (ou Cur 2). Duas linhas
horizontais surgiro na tela do osciloscpio.
III- No cursor ADJUST posicionar uma das linhas sobre o grfico, em torno do valor em
regime ou do valor mdio da resposta, e em torno do valor mximo da resposta obtida.
e) Anotar os valores indicados na tela do instrumento. Calcular a relao porcentual entre o valor
mximo e o valor em regime para obter a estimativa do mximo pico da resposta temporal.
Respostas: ________________________________________________________________ .
f) Realizar os procedimentos a seguir no osciloscpio visando estimao do tempo de resposta
da malha.
I- Acionar a opo Type => Time e pressionar o boto Cur 1 (ou Cur 2). Duas linhas
verticais surgiro na tela do osciloscpio.
II- No cursor ADJUST posicionar uma das linhas sobre o grfico, em torno do valor onde a
informao do grfico comeou a aumentar, e em torno do valor onde a resposta entre na faixa
aproximada de erro em regime permanente.
9
g) Anotar os valores indicados na tela do instrumento. Anotar a diferena entre os valores de
tempo para obter estimativa da resposta temporal da malha de controle.
Respostas: ________________________________________________________________ .
h) Desligar a chave do mdulo. Desligar o osciloscpio. Fechar os programas do computador,
desligar o mesmo e tambm o estabilizador.
Questes complementares
Esta parte ser realizada posteriormente (at o dia da entrega do relatrio correspondente).
Os relatrios devem ser entregues at duas semanas aps a respectiva aula prtica. O guia deve
ser entregue com os itens solicitados devidamente preenchidos e deve ser anexado ao relatrio
final. Todos os grficos e programas devem ter o(s) nmero(s) de matrcula do(s) aluno(s) como
legenda nos grficos ou como comentrio inicial nos programas.
1) Realizar a anlise de estabilidade pelo critrio de Nyquist de uma malha de controle com
C(s) = Kp = 7 e G(s) = 1/[(s-2)(s+1)(s+3)].
2) Utilizando o critrio de Routh, para que faixa de ganhos K
I
(considere somente um controlador
integral) o sistema de controle de nvel estvel em malha fechada? A funo de transferncia do
mdulo dada abaixo.
1 80
16
) ( V
) ( N
) ( G
+
= =
s s
s
s
3) Se o sistema acima for controlado por um controlador proporcional, o sistema em malha
fechada apresentar overshoot? Se sim, em que condies, se no, por qu? Justifique sua
resposta.
Vous aimerez peut-être aussi
- Circuitos PolarizadosDocument4 pagesCircuitos PolarizadosJunior SaraivaPas encore d'évaluation
- Exemplo Config Modbus RTU r0Document10 pagesExemplo Config Modbus RTU r0Ademir FariasPas encore d'évaluation
- SGC 120 MK II Data Sheet 4921240652 PTDocument16 pagesSGC 120 MK II Data Sheet 4921240652 PTjohnzinxxPas encore d'évaluation
- NT Marelli 9GV Vag 2070Document10 pagesNT Marelli 9GV Vag 2070tclalitoPas encore d'évaluation
- Manual de Serviços de Motos TestsDocument22 pagesManual de Serviços de Motos TestsAdeildo Dos Santos Adeildo100% (1)
- CP 1457Document6 pagesCP 1457Fabio Pedroso de MoraisPas encore d'évaluation
- 4.amp Op Como Integrador e DiferenciadorDocument8 pages4.amp Op Como Integrador e DiferenciadorkledermonPas encore d'évaluation
- (E Book) Como Melhorar o Wifi Das EmpresasDocument36 pages(E Book) Como Melhorar o Wifi Das EmpresasronaldofmioniPas encore d'évaluation
- Ti Redes Modelos Osi Tcpip Voip e VPN AmostraDocument1 pageTi Redes Modelos Osi Tcpip Voip e VPN AmostraCê Tá DoidoPas encore d'évaluation
- Manual Impressora c06613756Document130 pagesManual Impressora c06613756José LeãoPas encore d'évaluation
- TW300R+ Guia Do Usuário PTDocument19 pagesTW300R+ Guia Do Usuário PTdavilimaPas encore d'évaluation
- Circuitos IntegradosDocument43 pagesCircuitos Integradosjorge luiz100% (2)
- Informática AcualizadoDocument16 pagesInformática AcualizadoArmando Mambuque Camare CamarePas encore d'évaluation
- Serie Quark PortuguesDocument2 pagesSerie Quark PortuguesstgpereiraPas encore d'évaluation
- Catálogo 03-02-2015 Douglas (Fat.)Document58 pagesCatálogo 03-02-2015 Douglas (Fat.)DouglasPanPas encore d'évaluation
- PixelDocument4 pagesPixelLio OliveiraPas encore d'évaluation
- Manual n480d Portuguese PDFDocument6 pagesManual n480d Portuguese PDFricardoPas encore d'évaluation
- 1833 4839 1 PB PDFDocument20 pages1833 4839 1 PB PDFlm rsPas encore d'évaluation
- Relatório 2 - Determinação de Band GapDocument4 pagesRelatório 2 - Determinação de Band GapVinícius Araújo FariasPas encore d'évaluation
- Teste Placa MãeDocument2 pagesTeste Placa MãeRenabassPas encore d'évaluation
- CPU LC 700 - SmarDocument3 pagesCPU LC 700 - SmarsamuelborgesPas encore d'évaluation
- Eletrônica AnalógicaDocument2 pagesEletrônica AnalógicaEng Renato De Marchi Vieira Dos SantosPas encore d'évaluation
- Questionario 1Document5 pagesQuestionario 1Zacarias TavaresPas encore d'évaluation
- Lista 2 BiestaveisDocument8 pagesLista 2 BiestaveisDobby FeioPas encore d'évaluation
- TCC - Modernização de Subestações 2.0Document21 pagesTCC - Modernização de Subestações 2.0Edmar MagelaPas encore d'évaluation
- Greatek Wr3454g Manual PTBDocument16 pagesGreatek Wr3454g Manual PTBMarceloPeres100% (1)
- GC250 - PT DataSheetDocument4 pagesGC250 - PT DataSheetPatrikFernandesPas encore d'évaluation
- Nucleo Tempo Real (SO)Document15 pagesNucleo Tempo Real (SO)Leonildo Dos SantosPas encore d'évaluation
- Keo Tabela Categoria Id DTMF Manual K 301Document20 pagesKeo Tabela Categoria Id DTMF Manual K 301HY_YTPas encore d'évaluation