Vous aimerez peut-être aussi
- Cam and ValveDocument13 pagesCam and ValveTi PiccoliPas encore d'évaluation
- Design Animation Guide-DikonversiDocument37 pagesDesign Animation Guide-Dikonversiindra adriansyahPas encore d'évaluation
- Motion Tutorial 2007Document30 pagesMotion Tutorial 2007Zoli0984Pas encore d'évaluation
- Dynamic Simulation Tutorial PDFDocument9 pagesDynamic Simulation Tutorial PDFLaura Peña100% (1)
- Tutorial Wf4 SimulDocument24 pagesTutorial Wf4 SimulrdsrajPas encore d'évaluation
- Valve Cam Mechanism 1864Document52 pagesValve Cam Mechanism 1864Bão SvPas encore d'évaluation
- Solid Works Motion Tutorial 2009Document21 pagesSolid Works Motion Tutorial 2009tornnado_Pas encore d'évaluation
- Microsoft PowerPoint - Mech-Intro 14.0 WS03.1 2DGearsDocument17 pagesMicrosoft PowerPoint - Mech-Intro 14.0 WS03.1 2DGearsNisar AhamedPas encore d'évaluation
- Introduction To Solid Modeling Using Solidworks 2006: Cosmosmotion TutorialDocument30 pagesIntroduction To Solid Modeling Using Solidworks 2006: Cosmosmotion TutorialPhan Dinh SyPas encore d'évaluation
- Suspension Analysis - FinalDocument4 pagesSuspension Analysis - FinalIbraheem KhressPas encore d'évaluation
- Autodesk Inventor - Cam and ValveDocument12 pagesAutodesk Inventor - Cam and ValveNdianabasi UdonkangPas encore d'évaluation
- Solidworks SImulation Prescribed DisplacementsDocument4 pagesSolidworks SImulation Prescribed DisplacementsBobKatPas encore d'évaluation
- Break SistemDocument9 pagesBreak SistemSteven Y.MPas encore d'évaluation
- Slide Manual Diseño 7Document20 pagesSlide Manual Diseño 7David Felipe Limas MendigañoPas encore d'évaluation
- ActuatorDocument9 pagesActuatorRafael Flores GonzálezPas encore d'évaluation
- Tutorial 08 Shear Strength ReductionDocument12 pagesTutorial 08 Shear Strength ReductionMaulida Surya IrawanPas encore d'évaluation
- SolidWorks Motion Tutorial 2018Document33 pagesSolidWorks Motion Tutorial 2018jimmy jimenez barriosPas encore d'évaluation
- Piston Exercise: ME345: Modeling and Simulation Professor Frank Fisher Stevens Institute of TechnologyDocument16 pagesPiston Exercise: ME345: Modeling and Simulation Professor Frank Fisher Stevens Institute of TechnologyFelix Wahyu UtomoPas encore d'évaluation
- Root Locus Design Using MATLABDocument19 pagesRoot Locus Design Using MATLABMatlabAsignmentExpertsPas encore d'évaluation
- Study On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsDocument5 pagesStudy On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsAnonymous 5AmJ13mLkPas encore d'évaluation
- Panels and Push-Buttons: Geometry and Material PanelDocument2 pagesPanels and Push-Buttons: Geometry and Material Panelडॉ. कनिष्क शर्माPas encore d'évaluation
- SolidWorks Motion Tutorial 2010Document31 pagesSolidWorks Motion Tutorial 2010Hector Adan Lopez GarciaPas encore d'évaluation
- 4Document11 pages4api-442192098Pas encore d'évaluation
- Stress-Strain Test 2015 SpringDocument6 pagesStress-Strain Test 2015 SpringRich GarrPas encore d'évaluation
- Pistonmechanismtutorial RewiteDocument11 pagesPistonmechanismtutorial RewiteAhmad SawanPas encore d'évaluation
- Movimiento Armonico SimpleDocument6 pagesMovimiento Armonico SimpleFrancisco Manuel Ugarte PalacinPas encore d'évaluation
- EE364 Maxwell Simulation Assignment 1Document37 pagesEE364 Maxwell Simulation Assignment 1jalilemadiPas encore d'évaluation
- TUe 4AUB20 Exercise4Document5 pagesTUe 4AUB20 Exercise4Saad ullah ZiaPas encore d'évaluation
- Shaft Alignment - Rim and Face MethodDocument6 pagesShaft Alignment - Rim and Face MethodWajdi MansourPas encore d'évaluation
- Animation GuideDocument37 pagesAnimation Guidehiren_mistry55Pas encore d'évaluation
- Instruction-Force of Jet SimulationDocument8 pagesInstruction-Force of Jet SimulationEduFeatPas encore d'évaluation
- It's All in The PresentationDocument14 pagesIt's All in The PresentationkaoblekstenaPas encore d'évaluation
- Forward and Inverse Modeling of Gravity DataDocument14 pagesForward and Inverse Modeling of Gravity DataMuhamad Firdaus Al-HakimPas encore d'évaluation
- 4.7 Cam in Motion-RosenfeldDocument8 pages4.7 Cam in Motion-RosenfeldCatherine RosenfeldPas encore d'évaluation
- Four Bar LinkageDocument8 pagesFour Bar LinkageBeacon 641Pas encore d'évaluation
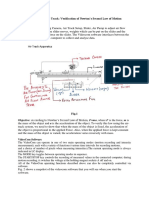
- M1 AirTrackDocument5 pagesM1 AirTrackAbhroPas encore d'évaluation
- Setting - Blade GraderDocument24 pagesSetting - Blade Gradermohtar sujonoPas encore d'évaluation
- Air-X Maxwell Simulation Student ProceduresDocument37 pagesAir-X Maxwell Simulation Student ProceduresHamid RezaPas encore d'évaluation
- Setup Stepper MotorsgDocument10 pagesSetup Stepper MotorsgJorge GomisPas encore d'évaluation
- Alignment of TwoDocument15 pagesAlignment of TwoquintanacalzadillasjaimePas encore d'évaluation
- MET 306 Activity 8a Mechanism Design Wildfire 5.0 Level 7Document10 pagesMET 306 Activity 8a Mechanism Design Wildfire 5.0 Level 7arulvasanth_30011980Pas encore d'évaluation
- Smith Simulator HELP: Image Courtesy Paul Kiciak, N2PKDocument11 pagesSmith Simulator HELP: Image Courtesy Paul Kiciak, N2PKDominguez RonaldPas encore d'évaluation
- Jambient Spectral MorphDocument4 pagesJambient Spectral MorphMarcelo KraiserPas encore d'évaluation
- Multisim TutorialDocument9 pagesMultisim Tutorialapi-240822427Pas encore d'évaluation
- Kinematics and Dynamics - Lab3 PDFDocument8 pagesKinematics and Dynamics - Lab3 PDFKunal SharmaPas encore d'évaluation
- Elastic Properties of Solids - ManualDocument9 pagesElastic Properties of Solids - ManualMuzamil ShahPas encore d'évaluation
- Tutorial On Assembly and Solidworks Motion: ObjectiveDocument7 pagesTutorial On Assembly and Solidworks Motion: ObjectiveD_D_76Pas encore d'évaluation
- Vehicle Suspension System Varnhagen Creed KahawatteDocument29 pagesVehicle Suspension System Varnhagen Creed KahawatteRanjeetPas encore d'évaluation
- Autodesk Mechanical Desktop Piston TutorialDocument16 pagesAutodesk Mechanical Desktop Piston TutorialcasanovavnPas encore d'évaluation
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- ABAQUS TUTORIAL Workshop7 Creep StepsDocument8 pagesABAQUS TUTORIAL Workshop7 Creep StepsBolarinwaPas encore d'évaluation
- Philips MicroDose-L30-full CalibrationDocument12 pagesPhilips MicroDose-L30-full CalibrationTony Kututo100% (1)
- Powermill Multi AxisDocument12 pagesPowermill Multi AxisMatheus Mancini100% (1)
- Asfafjhaf F SDF DSFSD F Sdfs Dfsdfs FSF S Fer SBFDHD GFDGDF G D G DF GDFG DFDocument22 pagesAsfafjhaf F SDF DSFSD F Sdfs Dfsdfs FSF S Fer SBFDHD GFDGDF G D G DF GDFG DFaamirPas encore d'évaluation
- University of Houston: Computer-Aided Design Mid-Term Project 1 Spring 2017Document25 pagesUniversity of Houston: Computer-Aided Design Mid-Term Project 1 Spring 2017Mudasir SoomroPas encore d'évaluation
- Team 1 Gulfstream IDocument10 pagesTeam 1 Gulfstream IHugo Kike LaraPas encore d'évaluation
- CATIA V5-6R2015 Basics Part III: Assembly Design, Drafting, Sheetmetal Design, and Surface DesignD'EverandCATIA V5-6R2015 Basics Part III: Assembly Design, Drafting, Sheetmetal Design, and Surface DesignÉvaluation : 5 sur 5 étoiles5/5 (2)
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)D'EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Pas encore d'évaluation
- Read MeDocument3 pagesRead MeJuanPas encore d'évaluation
- Fluent-Intro 18.0 Module07 Turbulence PDFDocument29 pagesFluent-Intro 18.0 Module07 Turbulence PDFAlex HolguinoPas encore d'évaluation
- ADAMS VIEW Tutorial ME 350 University of Michigan 2Document29 pagesADAMS VIEW Tutorial ME 350 University of Michigan 2Andres RodriguezPas encore d'évaluation
- Tutorial Trabajando Con SolidosDocument58 pagesTutorial Trabajando Con SolidosAlex HolguinoPas encore d'évaluation
- Lab 5Document4 pagesLab 5Alex HolguinoPas encore d'évaluation
- Pagead Ads Client CA-pub-837Document1 pagePagead Ads Client CA-pub-837Alex HolguinoPas encore d'évaluation
- 2 2Document2 pages2 2Alex HolguinoPas encore d'évaluation
- Chapter5 Solved ProbsDocument5 pagesChapter5 Solved ProbsAlex HolguinoPas encore d'évaluation
- Speed TripleDocument379 pagesSpeed TriplecsavargaPas encore d'évaluation
- Polypropylene: Product Data SheetDocument2 pagesPolypropylene: Product Data Sheet李万福Pas encore d'évaluation
- On Wire IndustryDocument47 pagesOn Wire IndustryAjit SharmaPas encore d'évaluation
- Dazio Beyer Bachmann - 2009 PDFDocument16 pagesDazio Beyer Bachmann - 2009 PDFErick LópezPas encore d'évaluation
- MIL-F-5509D - Fittings, Flared Tube, Fluid ConnectionDocument18 pagesMIL-F-5509D - Fittings, Flared Tube, Fluid ConnectionthomasPas encore d'évaluation
- Behaviour of A Sustainable Concrete in Acidic Environment: SustainabilityDocument13 pagesBehaviour of A Sustainable Concrete in Acidic Environment: Sustainabilitym_shahbaghiPas encore d'évaluation
- ACS800 GeneralDocument14 pagesACS800 GeneralAnonymous AMQMyB2EbPas encore d'évaluation
- Tolerances Tables PDFDocument16 pagesTolerances Tables PDFPramod SaljoshiPas encore d'évaluation
- Linbad Duct SupportsDocument46 pagesLinbad Duct SupportsdreamagiczPas encore d'évaluation
- Naphtha Catalytic Cracking For Propylene ProudctionDocument5 pagesNaphtha Catalytic Cracking For Propylene ProudctionWong Yee SunPas encore d'évaluation
- 2D Numerical Analysis of Hydraulic Fracturing in Heterogeneous Geo-Materials - 2009 - c49 PDFDocument11 pages2D Numerical Analysis of Hydraulic Fracturing in Heterogeneous Geo-Materials - 2009 - c49 PDFMoataz Hesham SolimanPas encore d'évaluation
- Injection System VMUplusDocument15 pagesInjection System VMUplusmohamed rafiPas encore d'évaluation
- Automotive After Market Information MEA PDFDocument60 pagesAutomotive After Market Information MEA PDFjose03Pas encore d'évaluation
- End Sem Q PaperDocument2 pagesEnd Sem Q PapersantkabirPas encore d'évaluation
- Bearing Ina Lit - 167 - Us - Us PDFDocument16 pagesBearing Ina Lit - 167 - Us - Us PDFbatman2054Pas encore d'évaluation
- WS1 5ciDocument2 pagesWS1 5ciramonmzaPas encore d'évaluation
- Flange Coupling DesignDocument16 pagesFlange Coupling DesignJaspreet KhattraPas encore d'évaluation
- Fragmentation and Its Impact On Downstream ProcessingDocument4 pagesFragmentation and Its Impact On Downstream Processingalvaroaac4Pas encore d'évaluation
- Boys Book of Steam EnginesDocument282 pagesBoys Book of Steam Enginesmardukzek100% (6)
- GearsDocument22 pagesGearsAnurag MidhaPas encore d'évaluation
- BSK1 Bellows Sealed Globe ValvesDocument4 pagesBSK1 Bellows Sealed Globe ValvesAhmed RamadanPas encore d'évaluation
- Comparitive Study of Shear WallDocument51 pagesComparitive Study of Shear WallEspn Sachin100% (1)
- Ion Exchangein Hydrometallurgical Processing An Overviewand Selected ApplicationsDocument22 pagesIon Exchangein Hydrometallurgical Processing An Overviewand Selected ApplicationsShikoyeniPas encore d'évaluation
- Stress Strain ModelDocument3 pagesStress Strain ModelKtk ZadPas encore d'évaluation
- Pipe Valves and Fittings - 15000Document11 pagesPipe Valves and Fittings - 15000willianPas encore d'évaluation
- Magnum Composite Plug Catalog 06-30-10Document21 pagesMagnum Composite Plug Catalog 06-30-10Emad JamshidiPas encore d'évaluation
- Catalog Aer Condiționat Split Inverter SAMSUNG-2014Document17 pagesCatalog Aer Condiționat Split Inverter SAMSUNG-2014georgianconstantinPas encore d'évaluation
- The Importance of Cleaning and Deposit Control in Improving Paper Machine EfficiencyDocument4 pagesThe Importance of Cleaning and Deposit Control in Improving Paper Machine EfficiencySelly YunitaPas encore d'évaluation
- Emd NotesDocument182 pagesEmd Notesvpzfaris0% (1)
- Tin ADocument3 pagesTin ANishit TrivediPas encore d'évaluation